
































Walgenbach wechselt zu Eqwal
Christian Walgenbach hat eine neue berufliche Aufgabe gefunden.
WeiterlesenFachportal des Bundesinnungsverbandes für Orthopädie-Technik


Neben Rehabilitation und integrativer Versorgung rückt der Weltkongress der OTWorld im Mai 2026 das Thema Ausbildung in den Mittelpunkt. Über die Rolle der Dortmunder Bundesfachschule für Orthopädie-Technik (Bufa) hat die OT-Redaktion mit Direktorin Vanessa Eick gesprochen. Dabei wird deutlich: Ohne Invest in den Nachwuchs wird sich der Fachkräftemangel weiter verschärfen.

Wolfgang Paul Lenze, Robert Knoke
Die Dupuytrenkrankheit mit ihren Fingergelenkkontrakturen ist nicht heilbar. Chirurgische Fingerbegradigungen, invasiv oder minimal invasiv, sind von begrenztem zeitlichem Erfolg.
Vorgestellt wird eine dynamische Fingerstreckorthese, die nicht nur die Nachhaltigkeit jeder chirurgischen Fingerbegradigung erhöht, sondern auch postoperativ verbliebene Restkontrakturen, vor allem im Fingermittelgelenk, strecken kann. Zusätzlich ist mit dieser neuen Orthese die einzige atraumatische Behandlung der beginnenden Dupuytren’schen Kontraktur im Stadium 1 nach Tubiana möglich.
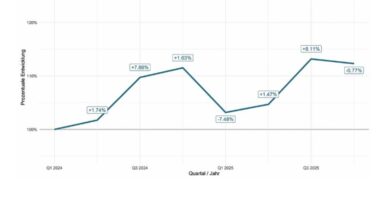
Mit den „Zahlen des Monats“ präsentieren der Verlag Orthopädie-Technik und die Opta-Data-Gruppe die wichtigsten Daten und Fakten zur wirtschaftlichen Entwicklung der Branche.

Kaltplasma ergänzt die Kompressionstherapie bei chronischen Wunden: Studien und Praxiserfahrungen zeigen, wie die Kombination Heilung beschleunigt, Schmerzen lindert und die Therapietreue verbessert.

Im Dezember 2025 ist das NIS-2-Umsetzungsgesetz in Deutschland verabschiedet worden. Es verpflichtet Betriebe, Unternehmen und Organisation dazu, mehr für ihre IT-Sicherheit zu tun und dies entsprechend nachzuweisen.

Ottobock wächst über Marktniveau: Rekordzahlen 2025, starke Nachfrage und strategische Expansion treiben den Erfolg.

Interdisziplinärer Austausch in Münster: Das 5. Münsteraner Gefäß-Symposium beleuchtete aktuelle Entwicklungen in Phlebologie, Angiologie und Lymphologie.

Große Bühne für den Meisterjahrgang 2025/2026: Die Bundesfachschule für Orthopädie-Technik in Dortmund verabschiedete ihre Absolventen mit Appellen an Netzwerk, Verantwortung und Zukunftsgestaltung im Handwerk.
Zum 75. Kongress der Studiengemeinschaft Orthopädieschuhtechnik traf sich die Branche in Osnabrück, um aktuelle Entwicklungen der Fußversorgung und die Zukunft des Handwerks zu diskutieren.
Christian Walgenbach hat eine neue berufliche Aufgabe gefunden.
WeiterlesenMit dem Börsengang in Frankfurt schlägt Ottobock nach 106 Jahren Familiengeschichte ein neues Kapitel auf. CEO Oliver Jakobi und CFO Dr. Arne Kreitz betonen im OT-Interview: Das frische Kapital soll vor allem in Zukunftstechnologien und den Ausbau der individualisierten Orthopädie-Technik fließen.
V. Katter1, C. Huperz1, J. Bartsch1, I. Özlü2, M. Regier3, R. I. Amelung2, B. Klemme2, M. Kohlhase1
Herkömmliche Orthesen zur Prävention des Diabetischen Fußsyndroms (DFS) können kritische Belastungen nicht kontinuierlich überwachen. Diese Studie untersucht die Integration von Drucksensorik in einer Orthese. Zuerst wird die optimale Sensorposition evaluiert, wobei sich die prozesstechnisch einfachste Position unter der Weichbettung als messtechnisch anspruchsvoll erweist (starke Dämpfung, Informationsverlust). Eine zweite Studie zeigt mittels einer KI-basierten Anomalieerkennung (LSTM-Autoencoder), dass aus diesen gedämpften Daten dennoch klinisch relevante Abweichungen detektiert werden können, sofern eine hohe Sensordichte und personenspezifische Modelle genutzt werden. Dies belegt die technische Machbarkeit einer smarten Orthese für die Alltagsüberwachung.
Medizinische adaptive Kompressionssysteme (MAKs) rücken zunehmend in den Fokus der Lymphödemtherapie. Unter der Leitung von PD Dr. Anett Reißhauer und PD Dr. Max E. Liebl hat die Charité – Universitätsmedizin Berlin deren Wirksamkeit gegenüber klassischer Kompressionsbandagierung untersucht.
WeiterlesenOrthesen zum Ziel bringen mit dem DyeMansion Print-to-Product Workflow.
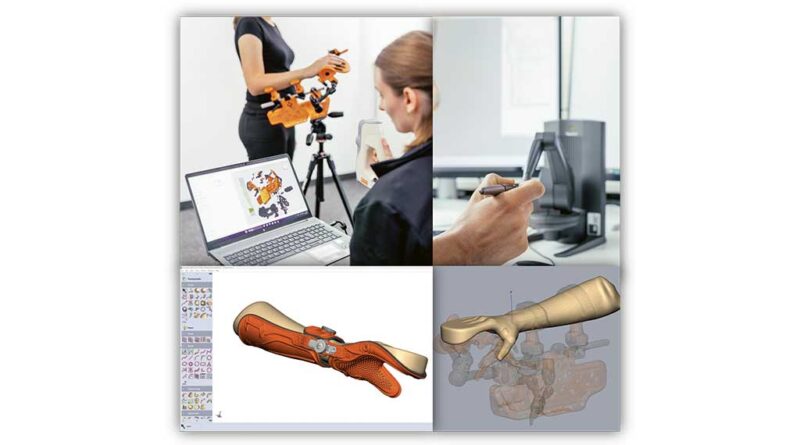
WeiterlesenVom 3D-Körperscan über ein digitales Modell zur Hilfsmittelkonstruktion.
Weiterlesen3D-gedruckte Fußprodukte: Warum jetzt der richtige Zeitpunkt ist, um neu zu denken.
WeiterlesenDer Augo Socket von Invent Medical setzt einen neuen Standard für definitive Prothesenschäfte und vereint Komfort, Präzision und Haltbarkeit in einem vollständig digitalen Workflow.
WeiterlesenBürokratieabbau; ein schnellerer, digitaler Staat – was bisher wie eine unerfüllbare Wunschliste klang, soll schon bald Realität werden. Zumindest wenn man sich die Maßnahmen in der Modernisierungsagenda anschaut, die gerade von der Bundesregierung verabschiedet wurde.
WeiterlesenBei der Messe „Orthopädie Schuh Technik“ in Köln traf Künstliche Intelligenz auf traditionelles Handwerk. Fachvorträge und Diskussionen beleuchteten aktuelle Versorgungsthemen und Wege gegen den Fachkräftemangel.
Weiterlesen