Ein neuronal gesteuertes Exoskelett in der Therapie von Patientinnen und Patienten mit Querschnittlähmung
A. Brinkemper1, Th. A. Schildhauer1, M. Aach2
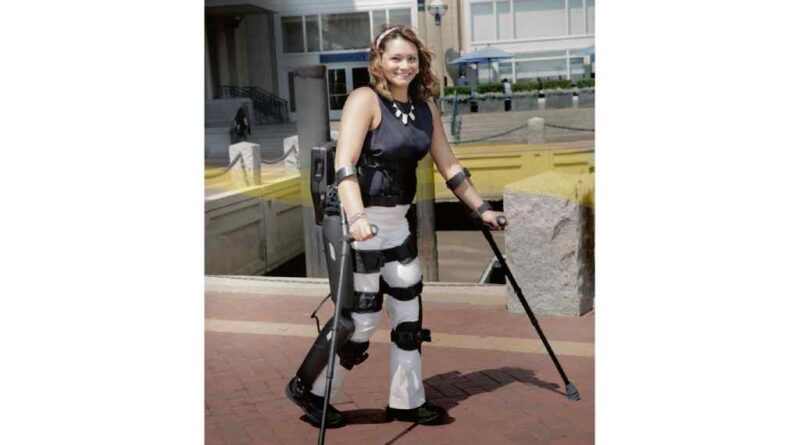
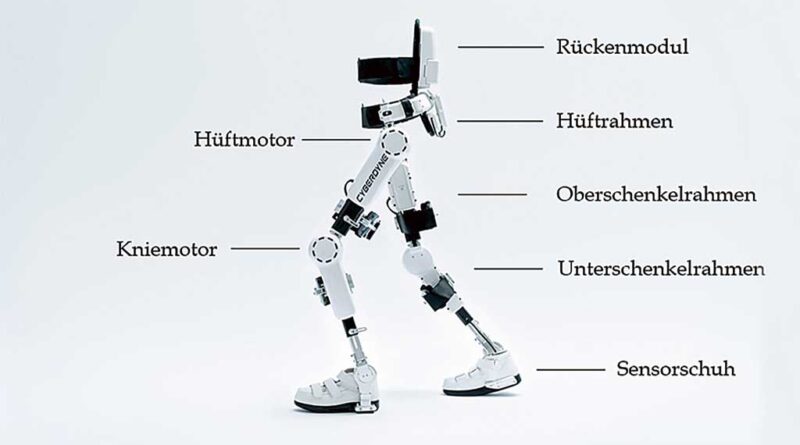
In den letzten Jahren haben robotische Therapieansätze und Exoskelette zunehmend Einzug in Querschnittgelähmten-Zentren auf der ganzen Welt gehalten. Wir möchten über die von unserer Arbeitsgruppe gemachten Erfahrungen in der Therapie mit dem Exoskelett HAL bei Patientinnen und Patienten mit Querschnittlähmung berichten. Bei der überwiegenden Mehrheit der in den Studien eingeschlossenen Patientinnen und Patienten kam es zu funktionellen Verbesserungen in Form einer verbesserten Gehstrecke, Gehgeschwindigkeit und Ausdauer. Darüber hinaus wurden eine Reihe weiterer Fortschritte beschrieben, wie beispielsweise eine vorübergehende Abnahme der Spastizität, eine Verbesserung der Blasen- und Darmfunktion, eine Schmerzreduktion sowie eine Veränderung der Muskelaktivität.