C‑Leg Basisseminar
Grundlage zur Erlangung des C‑Leg-Zertifikats Das C‑Leg wurde 1997 als weltweit erstes Beinprothesensystem mit elektronisch geregelter hydraulischer Stand- und Schwungphasensteuerung
WeiterlesenFachportal des Bundesinnungsverbandes für Orthopädie-Technik
Grundlage zur Erlangung des C‑Leg-Zertifikats Das C‑Leg wurde 1997 als weltweit erstes Beinprothesensystem mit elektronisch geregelter hydraulischer Stand- und Schwungphasensteuerung
WeiterlesenGrundlage zur Erlangung des C‑Leg-Zertifikats Das C‑Leg wurde 1997 als weltweit erstes Beinprothesensystem mit elektronisch geregelter hydraulischer Stand- und Schwungphasensteuerung
WeiterlesenD. W. W. Heitzmann, V. S. Högerle, U. Trinler, S. I. Wolf, M. Alimusaj
In dieser Studie wird ein Prothesenfuß, der mittels additiver Verfahren hergestellt wurde, in zwei Versionen (Soft & Hard) mit fünf konventionellen marktüblichen Prothesenfüßen verglichen. Für den Vergleich wird die Roll Over Shape (ROS) genutzt. Die ROS entspricht dem Verlauf des Kraftangriffspunktes in einem schaftbezogenen Koordinatensystem. Diese Kurve entspricht in etwa der Verformung der Strukturen unter Last und kann so Auskunft über das Abrollverhalten des Prothesenfußes liefern.
F. Buttgereit, D.-T. Schraeder, T. Schafran, Ph. Lichte
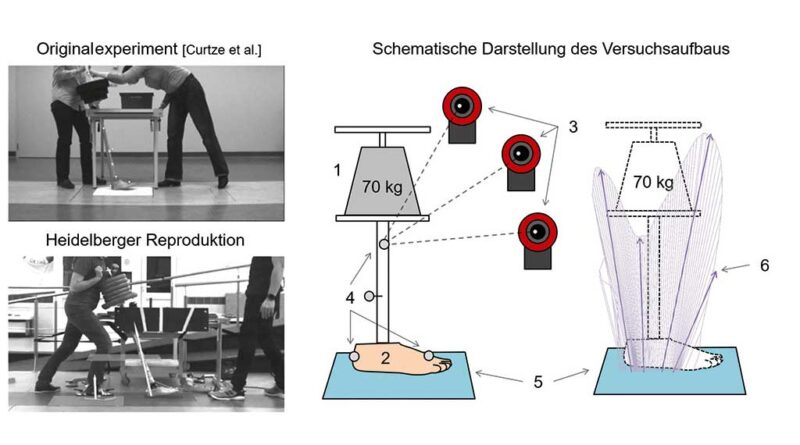
Patienten mit einer operativ angebrachten externen Fixation an den unteren Extremitäten sind in ihrer Mobilität eingeschränkt. Betrachtet werden die Beanspruchungen bei der Mobilisierung des Patienten über einen Fixateur, der in der Tibia verankert ist. Basierend auf einer biomechanischen Betrachtung wird die Relevanz verschiedener Einflussgrößen auf die Tragfähigkeit abgeschätzt. Mithilfe von zyklischen Belastungsversuchen am Schafsknochen sowie an humanen Tibiae wurde die Tragfähigkeit des Knochens und Fixateurs untersucht. Eine gleichmäßige Belastung der eingebrachten Schrauben konnte als entscheidender Faktor für die Steigerung der Tragfähigkeit bestätigt werden. Ausgehend von den Versuchen wurde ein additiv gefertigtes Fußstück für den Fixateur ausgestaltet und getestet.
Die Bufa steht traditionell für Wissen aus der Praxis und Wissen für die Praxis. Daher wird das Kollegium anlässlich des
WeiterlesenL. M. Tiesler, St. Willwacher
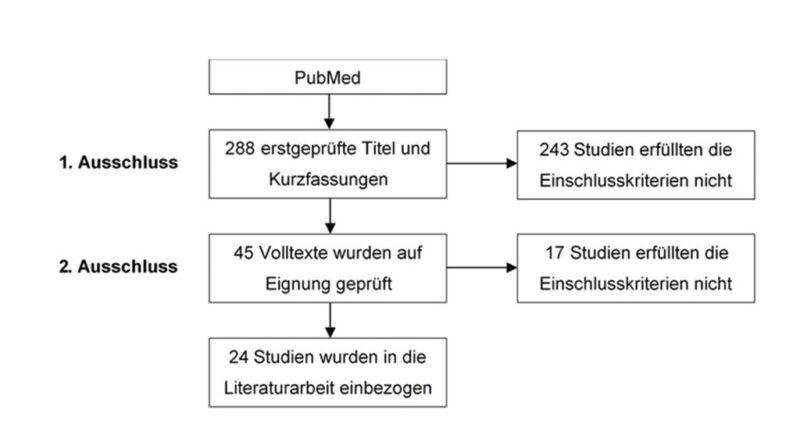
Ziel der vorliegenden Arbeit ist es, die Effekte der Versorgung mit einer unilateralen Unterschenkelprothese auf die mechanische Belastung des Knie- und des Hüftgelenks der nicht betroffenen Seite von Menschen mit Amputation auf der Basis der einschlägigen Forschungsliteratur zu bewerten. Dazu wurde eine systematische Literaturrecherche in der Datenbank PubMed durchgeführt. In den eingeschlossenen Studien werden Probandinnen und Probanden mit unilateraler transtibialer Amputation beim ebenerdigen Gehen ausschließlich unter Verwendung passiver Prothesen bei einer selbstgewählten Gehgeschwindigkeit bzw. einer Gehgeschwindigkeit im Bereich von 0,7 bis 1,4 m/s untersucht. Bezüglich des Kniegelenks berichten vier von sechs Analysen über eine Erhöhung des externen Knieadduktionsmoments auf der nicht betroffenen Seite zwischen + 5,1 % und + 31,6 % im Vergleich zu einer Kontrollgruppe ohne Amputation. Im Vergleich zur betroffenen Seite zeigten alle eingeschlossenen Studien ein erhöhtes externes Knieadduktionsmoment (+ 5,3 % bis + 56,0 %) auf der nicht betroffenen Seite. Die Untersuchungen des Hüftgelenks ergaben bei drei von fünf eingeschlossenen Analysen zwischen + 5,7 % und + 23,0 % erhöhte externe Adduktionsmomente im Vergleich zu einer Kontrollgruppe ohne Amputation. Der Vergleich mit der betroffenen Seite zeigte bei allen eingeschlossenen Studien höhere maximale Hüftadduktionsmomente zwischen + 3,1 % und + 39,7 %.
Eine Kombination aus erhöhten maximalen externen Knie- und Hüftadduktionsmomenten und einer asymmetrischen Belastung der unteren Extremitäten kann als Risikofaktor für die Entstehung degenerativer Erkrankungen angesehen werden. Die Ergebnisse des Literaturüberblicks zeigen, dass die mechanische Belastung (und damit das Risiko für die beschleunigte Entwicklung einer Knie- bzw. Hüftgelenkarthrose) des nicht betroffenen Beins nach einer unilateralen transtibialen Amputation bei Verwendung passiver Prothesensysteme erhöht ist.
Nach zwei Jahren pandemiebedingter Unterbrechung bietet der 12. Kongress der Deutschen Gesellschaft für Biomechanik (DGfB) e. V. an der Deutschen
WeiterlesenTh. Stief, T. Sprekelmeyer
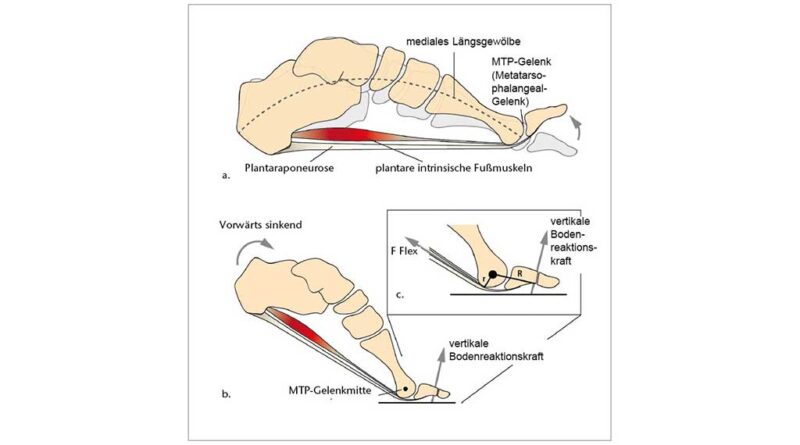
Eine hohe Beweglichkeit des Fußes ist notwendig, um Belastungen zu dämpfen. Andererseits muss der Fuß aber auch eine starre Konfiguration einnehmen können, da er als Hebel für den Vortrieb essenziell ist. Gewährleistet wird dies durch den sogenannten Windlass-Mechanismus („Seilwinden-Mechanismus“): Werden die Zehen dorsalextendiert, spannen sich die plantaren Muskeln, Sehnen und Bänder an – Mittel- und Rückfuß werden aufgerichtet, supiniert und auf diese Weise ein rigider Hebel erzeugt. Bei vielen Fehlstellungen ist dieser Mechanismus beeinträchtigt oder gar nicht vorhanden; keine Einlage kann ihn bisher aktiv unterstützen oder ersetzen. Die hier vorgestellte 3D-gedruckte bionische Fußorthese unterstützt den Windlass-Mechanismus, wodurch eine dynamische Unterstützung des Fußes ermöglicht wird. In einer biomechanischen Studie konnten die positiven Effekte der 3D-gedruckten bionischen Fußorthese nachgewiesen werden.
L. Lastring
Die Verwendung des Begriffs der „sensomotorischen“ Einlagenversorgung erinnert bisweilen an die babylonische Sprachverwirrung: Unter dem Sammelbegriff „sensomotorisch“ werden „propriozeptive“,„afferenzstimulierende“ oder „neurologische“ Einlagen subsumiert, um nur einige zu nennen. Manchmal werden die Namen der Entwickler oder Hersteller als Ergänzung angefügt (z. B. Jahrling‑, Springer- oder Aich-Einlagen), manchmal wird in der Bezeichnung auf die Bauweise angespielt (z. B. „Plättchen-Einlagen“), manchmal werden Kunstbegriffe gewählt (z. B. „podoätiologische“ Einlagen). Diese sprachliche Vielfalt, die auch die tatsächliche Vielfalt der unterschiedlichen Konzepte unter dem Oberbegriff „sensomotorisch“ widerspiegelt, erschwert die fachliche Diskussion darüber, was diese neueren Einlagentypen tatsächlich bewirken und wodurch ihre Wirkung hervorgerufen wird. Ziel dieses Artikels ist es, diese Vielfalt zu strukturieren, die möglichen Wirkungsweisen zu differenzieren und klarere Bezeichnungen für die genannten Einlagentypen vorzuschlagen.
F. Sichting, N. B. Holowka, O. B. Hansen, D. E. Lieberman
Obwohl die meisten konstruktiven Merkmale heutiger Schuhe intensiv erforscht wurden, ist die Wirkung der Zehensprengung bisher kaum untersucht. Als Zehensprengung wird der Winkel zwischen der horizontalen Bodenebene und einer Linie vom Abrollpunkt zur vorderen Spitze der Schuhsohle definiert. Diese bei fast allen Schuhen vorhandene Aufwärtswölbung der Sohle hebt die Zehenbox vom Boden ab und hält so die Zehen dauerhaft in einer dorsalflektierten Position. Es ist bekannt, dass die Zehensprengung die Abrollbewegung des Vorfußes aus der mittleren Standphase heraus erleichtert, jedoch kann die Zehensprengung auch Auswirkungen auf die physiologische Fußfunktion haben. Im Rahmen der vorgestellten Studie wurde in einem kontrollierten Experiment die Auswirkung der Zehensprengung auf die Biomechanik des Fußes untersucht. Dabei liefen die Teilnehmenden in speziell konstruierten Sandalen mit unterschiedlich stark gewölbtem Zehenbereich, wodurch Zehensprengungen von 10 bis 40 Grad simuliert wurden. Mittels Techniken der inversen Dynamik konnte festgestellt werden, dass die Zehensprengung die Gelenkmomente und die Arbeit an den Zehen in der Form beeinflusst, dass größere Grade der Zehensprengung zu einem geringeren mechanischen Arbeitsaufwand beim Gehen führen. Diese Ergebnisse bieten eine Erklärung dafür, warum die Zehensprengung seit Jahrhunderten ein weitverbreitetes Merkmal von Schuhen ist, deuten aber auch darauf hin, dass die Zehensprengung zu einer Schwächung der Fußmuskulatur und möglicherweise zu einer erhöhten Anfälligkeit für pathologische Zustände wie Plantarfasziitis beitragen kann.