Grenzen der Standardmodelle für die 3D-Bewegungsanalyse in der Prothetik: Vorstellung einer problemangepassten Lösung mit ersten praktischen Ergebnissen
E. Pröbsting, M. Ernst, T. Schmalz, V. Schopper, B. Pobatschnig, M. Bellmann
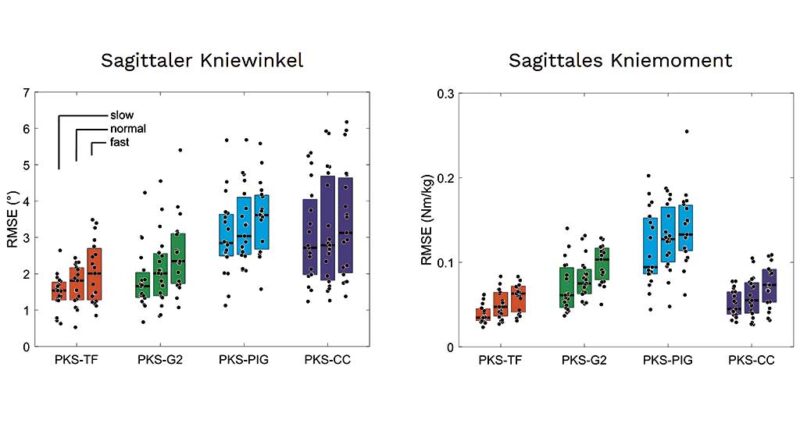
Eine exakte Bewertung der Funktion und Sicherheit von Prothesenkniegelenken ist mit einer instrumentellen 3D-Bewegungsanalyse möglich. Dabei ist methodisch zu beachten, dass bei den markerbasierten Untersuchungsmethoden neben der Messtechnik das genutzte Modell die Genauigkeit der Analyse entscheidend mitbestimmt. In diesem Beitrag wird eine Studie vorgestellt, in der ein speziell für die Bewegungsanalyse von Oberschenkelamputierten entwickeltes Modell multizentrisch getestet wurde. Dabei zeigte sich, dass dieses für die prothetische Extremität im Vergleich zu Standardmodellen die validesten und reliabelsten biomechanischen Parameter liefert.