WearRAcon Europe 2021
WearRAcon Europe 2021 will give insight into European aspects of industrial exoskeleton technologies and their assessment methodologies. This will be
WeiterlesenFachportal des Bundesinnungsverbandes für Orthopädie-Technik
WearRAcon Europe 2021 will give insight into European aspects of industrial exoskeleton technologies and their assessment methodologies. This will be
WeiterlesenS. Hazubski, H. Hoppe, A. Otte
Die Wiederherstellung der Handbewegung für Menschen mit Amputationen, Lähmungen oder Schlaganfällen ist ein wichtiger Bereich der orthopädietechnischen Forschung und Entwicklung. Zwar haben sich elektrodenbasierte Systeme, die den Input aus dem Gehirn oder dem Muskel nutzen, als erfolgreich erwiesen; diese Systeme sind jedoch tendenziell teuer und der Umgang mit ihnen schwer zu erlernen. In diesem Artikel wird ein laufendes medizintechnisches Projekt der Hochschule Offenburg vorgestellt, bei dem Augmented Reality (AR) für eine neuartige Steuerung von motorisierten Handorthesen sowie Handprothesen benutzt wird. In diesem System wird die Prothese von einer – in eine AR-Brille integrierten – Kamera getrackt; gleichzeitig werden virtuelle Steuerelemente über die Brille eingeblendet. Mit diesen kann der Patient durch Kopfbewegungen interagieren und vielfältige Öffnungs- und Schließbefehle für die Prothese oder Orthese eingeben. Das visuelle System muss zwar noch mit Patienten getestet werden, aber die geringen Kosten, die einfache Bedienung und der Verzicht auf Elektroden machen das System zu einer vielversprechenden Lösung für die Wiederherstellung der Handfunktion.
S. Matyssek, D. Hepp
Durch die Entwicklung exoskelettärer Strukturen wird der Versuch unternommen, verlorengegangene Funktionen des Bewegungsapparates möglichst gut zu ersetzen. In diesem Zusammenhang stellt die Nachbildung der komplexen Greiffunktion einer Hand eine besondere Herausforderung dar. Das Orthesensystem „exomotion® hand one“ ermöglicht es seinem Anwender, mit Hilfe eines EMG-Signals einen aktiven Orthesenaufbau anzusteuern und verschiedene Griffmuster auszuführen. Mit Hilfe digitaler Fertigungsmethoden sowie der entsprechenden Baugruppen der Herstellerfirma ist es somit möglich, ein adäquates Gesamtsystem mit individueller Passform zu verwirklichen, das seinem Anwender einen Mehrwert im Alltag bietet. Der Beitrag erläutert den kompletten Versorgungsvorgang mit einer myoelektrischen Handorthese und geht dabei auch auf das Zusammenspiel zwischen Hersteller und Orthopädietechniker ein.
S. Matyssek, D. Jäger
Das Dropped-Head-Syndrom (DHS) tritt bei einer Reihe von Erkrankungen – oft als Begleiterscheinung einer schwerwiegenden Indikation – auf. Patienten leiden unter dieser Symptomatik in besonders vielfältiger Weise, da der Kopf je nach Schweregrad der Erkrankung nur eingeschränkt angehoben oder aktiv gehalten werden kann. Die konventionelle Versorgung dieses Krankheitsbilds beschränkt sich bisher weitestgehend auf die Zweckentfremdung unterschiedlicher Zervikalorthesen, die jedoch den Anforderungen vieler Betroffener nicht gerecht werden. Der größte Nachteil bestehender Systeme zeigt sich in einer weitreichenden Immobilisierung des Kopfes, wodurch das häufig noch vorhandene Bewegungsvermögen des Anwenders unterbunden wird.
Th. Schmalz, J. Bornmann, B. Schirrmeister, J. Schändlinger, M. Schuler
Arbeitsbedingte muskuloskelettale Erkrankungen zählen in Deutschland und Europa zu den häufigsten Gründen für Arbeitsunfähigkeit und sind ein bedeutender Kostenfaktor für Unternehmen und Gesundheitssysteme. Mit der Einführung von Exoskeletten wird angestrebt, arbeitsbedingte Überlastungen des Bewegungsapparats zu verringern.
D. Kuhn, B. Freyberg-Hanl
Ein Resümee zum Einsatz von Exoskelett-Systemen in Deutschland ist der vorliegende Artikel von Dr. Daniel Kuhn und Birgit Freyberg-Hanl.
R. Kleinschmidt, B. Freyberg-Hanl, D. Kuhn
Das robotergestützte Gehtraining mit Hilfe eines Exoskeletts etabliert sich zunehmend im therapeutischen Behandlungsprozess. Ziel des Einsatzes solcher Systeme ist sowohl die Unterstützung vorhandener Körperfunktionen unter präventiven Gesichtspunkten als auch die Wiedererlangung verlorengegangener Funktionen im Rahmen rehabilitativer Prozesse. Die Anwendung solcher Systeme hat nicht nur positive Effekte auf die sensomotorischen Störungen, sondern auch auf Begleitkomplikationen der Grunderkrankungen sowie auf die psychische Gesundheit des Betroffenen. Allerdings ist nur über die Kenntnis der patientenbezogenen Befunddaten und der technischen Parameter der Systeme eine schlüssige und lückenlose Indikationsstellung für eine sinnvolle Therapie zu erreichen. Mit Hilfe eines Entscheidungsalgorithmus kann festgestellt werden, welche Exoskelettsysteme für welche Einsatzbereiche geeignet sind, um das jeweils bestmögliche Therapieergebnis für den Patienten zu erzielen.
V. Klamroth-Marganska
Roboter in der Neurorehabilitation werden nicht nur als Assistenzsysteme eingesetzt, sondern unterstützen den Therapeuten auch in der herkömmlichen Therapie. Der Armtherapieroboter ARMin wurde an der ETH Zürich in Zusammenarbeit mit der Universität Zürich entwickelt. Das Gerät ermöglicht ein intensives, aktiv assistiertes Training alltagsrelevanter Tätigkeiten des betroffenen Armes. ARMin wurde bereits in mehreren klinischen Studien erfolgreich auf Wirksamkeit geprüft. Basierend auf den positiven Ergebnissen klinischer Studien wird das Gerät kontinuierlich weiterentwickelt mit dem Ziel, Patienten den Einsatz ihres Armes im Alltag zu ermöglichen.
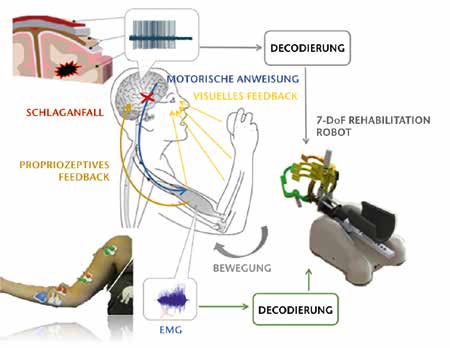
A. Ramos-Murguialday
Lähmungen nach einem Schlaganfall treten heutzutage häufig auf. Die Anzahl der Personen, die jedes Jahr einen Schlaganfall erleiden, steigt durch eine ungesunde Lebensführung dramatisch an (Stress, Ernährung, Tabak- und Alkoholkonsum usw.). Bei einer großen Zahl dieser Patienten sind Gehirnregionen betroffen, die die Steuerung von Bewegungen übernehmen. Viele dieser Patienten können daher mit den betroffenen Gelenken keine Bewegungen mehr ausführen. Für diese Gruppe besteht sechs bis acht Monate nach dem Schlaganfall im Allgemeinen keine Hoffnung auf Besserung mehr: Das Gehirn ist nicht mehr in der Lage, die Schädigung auszugleichen, denn neuroplastische Veränderungen, die die Regeneration unterstützen, können ohne Restbewegung der Muskeln nicht hervorgerufen und neue Nervenverbindungen nicht aufgebaut werden. Glücklicherweise liefert der wissenschaftliche Fortschritt neue Erkenntnisse und Technologien, die nicht nur dazu verwendet werden können, die Beschädigung zu umgehen und Bewegung zu unterstützen, sondern auch dazu, die beschädigten neuronalen Verbindungen zu rehabilitieren und Gehirn und Bewegung wieder zu verbinden. „Brain-Machine-Interfaces“ können zur Steuerung von Rehabilitationsrobotik verwendet werden. Diese neuartige Technologie schafft Hoffnung für gelähmte Schlaganfallpatienten.
A. Gillner, N. Borgwaldt, I. Maschke, Ch. Lübcke, S. Kroll, S. Roschka, Th. Platz
Seit September 2012 nutzt die BDH-Klinik Greifswald als erste Rehabilitationsklinik Deutschlands das ReWalk-System für querschnittgelähmte Patienten. ReWalk ist ein elektrisch motorisiertes Orthesensystem, das es dem Nutzer erlaubt, sich ohne eigene aktive motorische Funktionen im Hüftbereich und in den Beinen aus dem Sitz aufzurichten, zu stehen und auch zu gehen.
Vor dem Training wird in einer umfangreichen ärztlichen und therapeutischen Untersuchung geprüft, ob der Anwender für die Nutzung des Exoskeletts geeignet ist. Für die Trainingszeit in der Klinik werden Zwischenziele gesetzt, die systematisch und je nach Fähigkeit und Fertigkeit des Patienten umgesetzt werden. Anhand bestimmter Assessments werden Daten erhoben und in Form einer Beobachtungsstudie dokumentiert und ausgewertet. Neben den messbaren Daten werden subjektive Beobachtungen seitens der Anwender geschildert, zum Beispiel Aussagen zum Schmerzempfinden, zur Veränderung der Blasen- und Darmaktivität und zum allgemeinen Wohlbefinden.
Weiterlesen