Einleitung
Die Hände sind die wichtigsten Werkzeuge des Menschen. Die vielen kleinen Fingergelenke müssen beweglich und funktionstüchtig sein, um im Alltag die notwendigen Funktionen ausüben zu können. Fingerverletzungen bedrohen die Funktionsfähigkeit und damit die Erwerbsfähigkeit und Lebensqualität betroffener Patienten. Da Hände und Finger im Alltag so häufig und intensiv belastet werden, sind sie sehr anfällig für Verletzungen: Mehr als ein Drittel der Arbeitsunfälle sind Handverletzungen 1. Laut dem Jahresbericht 2021 des Handtraumaregisters der Deutschen Gesellschaft für Handchirurgie (DGH) sind die Phalangen dabei am häufigsten in Mitleidenschaft gezogen 2. Verletzungen der Phalangen und der metakarpalen Knochen machen etwa zehn Prozent aller Frakturen aus 3.
Neben der Verletzung selbst stellt die Ruhigstellung zur Behandlung eine Gefahr für die Handfunktion dar: Etwa 25 Prozent aller Fingereinsteifungen sind ursprünglich auf Frakturen zurückzuführen und stehen häufig mit einer zu langen Ruhigstellung in Verbindung 4.
Angesichts des Fachkräftemangels im Bereich der Rehabilitationsmedizin wird eine suffiziente Frührehabilitationsbehandlung von Fingerverletzungen immer schwieriger. Laut Arbeitsmarktstatistik der Bundesagentur für Arbeit wurde im Bereich Physiotherapie im Jahr 2019 ein Negativrekord mit 3,5 offenen Stellen auf eine arbeitssuchende Physiotherapeutin bzw. einen arbeitssuchenden Physiotherapeuten und mit einer Vakanzzeit von 189 Tagen erreicht, um eine offene Stelle zu besetzen 5. Allgemein sind besonders die medizinischen Gesundheitsberufe vom Fachkräfte- und Nachwuchsmangel betroffen: Im Jahr 2022 standen die medizinischen Gesundheitsberufe auf dem dritten Platz unter den Berufsgruppen mit den meisten offenen Arbeitsstellen 6. Eine Onlinebefragung des Deutschen Verbandes für Physiotherapie (ZVK) und des Verbandes für Physikalische Therapie (VPT) ergab, dass über die Hälfte aller Patientinnen und Patienten drei Wochen oder sogar länger auf einen Termin in der Physiotherapie warten müssen 7. Eine frühfunktionelle und qualitative Nachbehandlung in diesen ersten Wochen ist aber wichtig, um Folgeschäden nach Handverletzungen zu vermeiden, denn eine nicht adäquate Behandlung kann zu Funktionseinschränkungen der Hand führen 8. Patientinnen und Patienten mit degenerativen und neurologischen Erkrankungen profitieren ebenfalls von regelmäßiger Mobilisierung. Daraus ergibt sich insgesamt ein Bedarf an unterstützenden technischen Möglichkeiten. Diese könnten den Rehabilitationsprozess früh einleiten, die Wartezeit überbrücken und das medizinische Fachpersonal im Verlauf der Therapie entlasten.
Das Projekt „3Digity”
Es gibt bereits erste technische Angebote auf dem Markt, wie zum Beispiel Rehabilitationsroboter und/oder motorbetriebene Schienen, um Gelenke passiv zu mobilisieren. Eine gute geeignete technische Unterstützung für die Zwecke einer Handrehabilitation sollte folgende Eigenschaften aufweisen:
- Verfügbarkeit kurz nach der Verletzung,
- bequemer Sitz mit korrekter Positionierung der verletzten Fingergelenke,
- leichte Bedienbarkeit,
- mobiler Einsatz sowie
- individuelle, spezifisch auf die Verletzung zugeschnittene Therapieoptionen.
Im Projekt „3Digity“ an der Georg-August-Universität Göttingen wird an einer Lösung gearbeitet, die diese Anforderungen erfüllt: eine mobile, individualisierte motorisierte Fingerorthese, die auf die Pathophysiologie und die therapeutischen Bedürfnisse der Patienten und Patientinnen zugeschnitten ist und mittels 3D-Drucks hergestellt wird.
Das Projekt ist ein seit März 2022 vom Bundesministerium für Wirtschaft und Klimaschutz (BMWK) gefördertes Projekt an der Universitätsmedizin der Universität Göttingen. Es hat zum Ziel, eine patientenspezifische Rehabilitationsfingerorthese zu einem marktreifen Produkt zu entwickeln.
Dazu arbeitet ein interdisziplinäres Team mit Fachkompetenzen in den Bereichen
- Physiotherapie,
- Medizin,
- Orthopädie-Technik,
- Ingenieurswesen und
- Betriebswirtschaft
eng zusammen, um den Transfer von der Forschung und Produktentwicklung über die klinische Testung und Zertifizierung bis hin zur Produktvermarktung umzusetzen.
Medizinische Anforderungsanalyse und Prototypenentwicklung
Das Projekt befindet sich aktuell (Stand: Januar 2023) in der Entwicklungsphase funktionstauglicher Prototypen, in der die wesentlichen Anforderungen innerhalb kurzer, iterativer Entwicklungszyklen in das Produkt integriert werden. Im Sinne einer agilen Produktentwicklung werden hierbei potenzielle Stakeholder interviewt, um ein Feedback bezüglich typischer Abläufe des praktischen Alltages zu erlangen, in denen es vor allem auf eine adäquate Handfunktion ankommt. Aus diesen Interviews sind die wesentlichen Produktanforderungen entstanden, die unter einem parallellaufenden Qualitätsmanagementprozess in den aufeinander aufbauenden Entwicklungsphasen erfüllt werden.
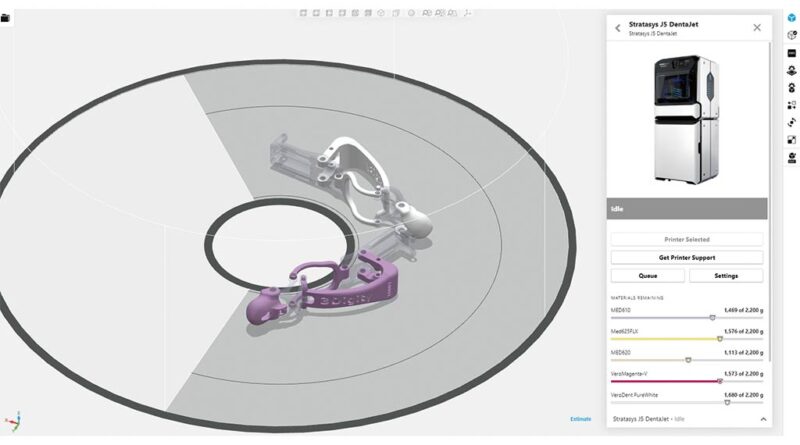
Für maximalen Tragekomfort und die korrekte Ausführung der Bewegungen müssen die physischen Finger- und Handkomponenten der zu entwickelnden Fingerbewegungsprothese individuell auf die jeweiligen Patientinnen und Patienten, die sie nutzen sollen, zugeschnitten werden. Die Fingerparameter können händisch oder digital erfasst werden. Zu diesem Zweck wurde ein Algorithmus entwickelt, der aus den ermittelten Parametern des jeweils zu unterstützenden Fingers automatisiert eine 3D-Vorlage erstellen kann (Abb. 1).
Das Ergebnis ist eine Datei im STL-Format, die direkt in den 3D-Druckprozess übernommen werden kann (Abb. 2).
Es entsteht ein an den zu versorgenden Finger der Patientinnen und Patienten individuell angepasstes Finger-Exoskelett. Dieses wird derzeit mit einem 3D-Drucker des Typs „Stratasys J5 DentaJet“ (Stratasys Ltd, Israel) hergestellt (Abb. 3).
In den nächsten Prototypenphasen werden weitere Druckverfahren getestet werden, um die für die Erfordernisse des Marktes am besten geeigneten Druckverfahren sowie geeignete Materialien zu ermitteln. Es gibt Technologien mit geringeren Kosten wie zum Beispiel Stereolithografie (SLA) oder Fused Deposition Modeling (FDM). Aufgrund der technischen Anforderungen (z. B. bezüglich der Druckpräzision) und Materialanforderungen sind preisgünstige Technologien wie SLA oder FDM für das hier vorgestellte Produkt aktuell nicht geeignet. „High-End-Technologien“ wie Selective Laser Sintering (SLS) oder Multi Jet Fusion (MJF) sind auf dem Markt für 3D-gedruckte Orthopädieprodukte bereits weit verbreitet. Es wird im Laufe des Projektes geprüft werden, welche Kombination aus Technologie, Material und Kosten am besten zu dem vorgestellten Projekt und seinen Anforderungen passt.
Die Fingerkomponente kann nicht alleine am Finger des Patienten angebracht werden. Dazu wird zusätzlich eine Handeinfassung (Handorthese) benötigt, die zur Stabilisierung und Fixierung dient. Diese wurde in der ersten Prototyp-Phase mit einer Schnittstelle zur Fingerkomponente ausgestattet. Es wurde eine standardisierte Schnittstelle entwickelt, die eine einfache Verbindung zwischen Finger- und Handkomponente erlaubt. Dadurch werden weitere Adaptierungen wie die Ausrichtung der Fingerkomponente ermöglicht (Abb. 4).
Die dritte Entwicklungsphase bestand darin, einen geeigneten Motor auszuwählen und eine Positionierung an die Fingerkomponente zu konstruieren. Außerdem wurde eine Steuerungseinheit für den Motor benötigt.
Ein umfassendes orthetisches Rehabilitationsprotokoll für Finger benötigt folgende Bewegungsmodi:
- Passiver Bewegungsmodus: Die Fingergelenke werden rein durch die Motorkraft bewegt (nicht durch Muskelkraft der Patienten und Patientinnen).
- Aktiv-assitiver Bewegungsmodus: Die freie aktive Bewegung der Patientinnen und Patienten wird durch den Motor unterstützt.
- Aktiver Bewegungsmodus: Fingergelenke bewegen sich frei durch aktive Muskelkraft der Patienten und Patientinnen (ohne Einsatz des Motors).
- Aktiv-resistiver Bewegungsmodus: Die Patientinnen und Patienten bewegen sich gegen den Widerstand des Motors.
Die ersten beiden Mobilisierungsvarianten sollen helfen, die Beweglichkeit der Finger zu erhalten oder wiederherzustellen und Verklebungen und dauerhafte Bewegungseinschränkungen zu vermeiden. Die dritte Variante ermöglicht es den Patientinnen und Patienten, geschützte und geführte aktive Bewegungen durchführen, um ihre Muskulatur wieder zu aktivieren und sich auf das Training der Muskulatur vorzubereiten; hier dient die Orthese als bewegliche Stütze bzw. Führung, um den Finger vor potenziell gefährlichen Bewegungen zu schützen. Der vierte Modus ermöglicht sodann ein gezieltes Training gegen Widerstand bei gleichzeitigem Schutz vor Fehlbewegungen.
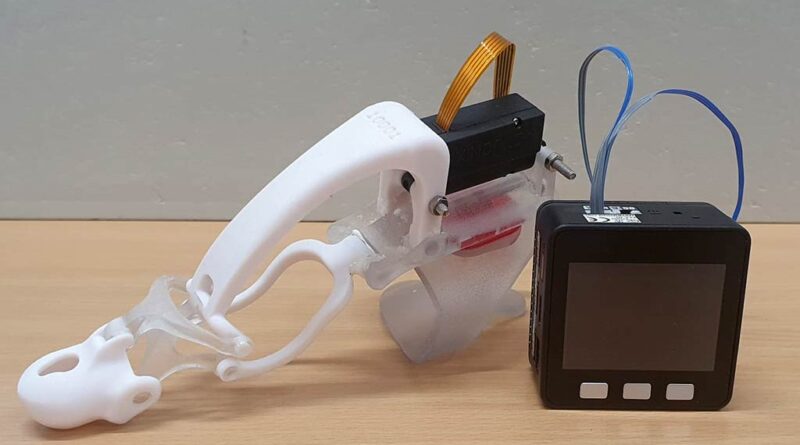
Das Steuerelement für die verschiedenen Bewegungsmodi wurde durch eine in ein Elektronikmodul eingebettete Software realisiert, die innerhalb der Prototypen-Phase auf einem „M5Stack“-Modul (M5Stack Technology Co., Ltd, China) läuft.
Motor und Steuerungsmodule werden extern von Zulieferern bezogen. Ziel ist es, den Bauraum beider Komponenten so klein wie möglich zu gestalten, damit die Last auf der Hand des Patienten reduziert und eine hohe Mobilität ermöglicht wird. Der aktuelle Prototyp ist mit einem Miniatur-Linearaktuator ausgestattet. Dieser Motor kann eine maximale Kraft von etwa 50 N aufbringen. Diese Kraft sorgt dafür, dass der Motor stark genug ist, um das System mit dem Finger darin zu bewegen. Entscheidend für die Sicherheit der Patientinnen und Patienten ist dabei die Entwicklung verschiedener aufeinander aufbauender Sicherheitssysteme – sowohl innerhalb der Software als auch der Hardware –, um sicherzustellen, dass die Mobilisierungskraft keine Gefahr für den heilenden Finger darstellt. Durch die Integration des Motors ist das zu erstellende Produkt nach aktuellem Kenntnisstand unter der Medizinprodukteklasse IIa als aktives therapeutisches Hilfsmittel gemäß MDR (Medical Device Regulation) einzuordnen. In Zukunft sollen Steuereinheit und Motor zu einem kleineren Modul verschmolzen werden, um Größe und Gewicht zu optimieren.
Aktueller Stand (Januar 2023) des Prototyps
Ein funktionstüchtiger motorisierter Prototyp mit einer Kontrolleinheit, die alle vier Bewegungsmodi erlaubt, konnte bereits entwickelt und realisiert werden (Abb. 5).
Aktuell wird an einer verbesserten Ausführung des Metacarpophalangealgelenks sowie an einer Ausrichtungseinstellung auf der Handkomponente gearbeitet, die auch eine leichte Abduktions- und Adduktionsneigung ermöglichen soll.
Skalierung des Herstellungsprozesses
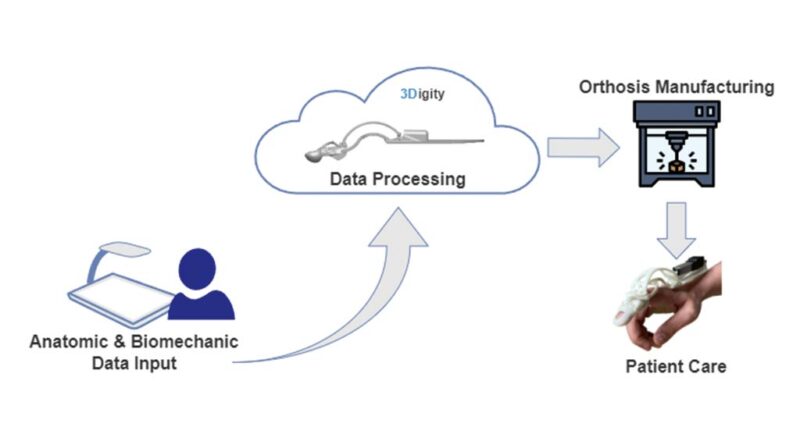
Der Produktionsprozess (Abb 6.) soll für die Skalierung der Lösung weitestgehend automatisiert werden. Er kann grob in drei Schritte unterteilt werden:
- Ermittlung der anatomischen Maße und zusätzlicher notwendigen Informationen
- Datenverarbeitung zur Generierung digitaler Modelle
- 3D-Druck der entsprechenden Komponenten und Beistellung von Motor und Steuerungselement
Mögliche Umsetzung und Einbindung in den klinischen Alltag
Die „3Digity“-Fingerbewegungsorthese soll möglichst früh innerhalb des Rehabilitationsprozesses eingesetzt werden. Da Herstellungsprozess und Lieferung voraussichtlich zwei bis drei Tage in Anspruch nehmen werden und – je nach medizinischer Indikation – Schwellungen oder eine Naht bei der Herstellung berücksichtigt werden müssen, soll die „3Digity“-Fingerbewegungsorthese unmittelbar nach der Akutphase angewendet werden.
In der Umsetzung müssen Maße oder Aufnahmen der Hand und des betroffenen Fingers genommen werden. Dies kann direkt in der medizinischen Einrichtung geschehen – je nach Verletzung entweder vor der Akutversorgung, nach einem operativen Eingriff oder im weiteren Verlauf der Nachsorge (beispielsweise nach Fadenzug und Rückgang der Schwellung), zum Beispiel durch Experten aus den Bereichen Therapie oder Sanitätshaus. Das Produkt kann dann in einer Sitzung angelegt und eingestellt werden und ist bereit für den Einsatz. Am Ende des Nutzungszeitraumes sollten Motor und Steuerungselement an „3Digity“ zurückgegeben werden, damit diese Komponenten im Sinne der Nachhaltigkeit wiederverwendet werden können.
Erkenntnisse aus der aktuellen Projektphase
Nach Abschluss einer umfassenden Literaturrecherche, des Besuchs einschlägiger Fachmessen und Fachtagungen sowie der Durchführung von Umfragen und Gesprächen mit Expertinnen und Experten aus den Bereichen Medizintechnik, Orthopädietechnik, Therapie und Medizin ist zwar davon auszugehen, dass das Produkt von großem Interesse für den Markt ist und die Nachsorge von Fingerverletzungen erheblich verbessern könnte, das aktuelle Marktumfeld kann allerdings insbesondere für Start-ups als herausfordernd angesehen werden. Folgende Gründe können dafür angeführt werden:
Komplizierte Zulassungsprozesse
Die neue MDR (Medical Device Regulation) auf EU-Ebene setzt Medizinprodukthersteller unter erhöhten Druck 9. Der neue Zulassungsprozess bindet durch gestiegene Anforderungen viele Ressourcen, was sich insbesondere für kleine Start-ups schwierig gestaltet. Eine große Unsicherheit stellt zudem die Auslastung der Benannten Stellen dar, deren Prüfung für ein Klasse-IIa-Produkt notwendig ist, sodass ein Markteintritt schwieriger planbar wird.
Erstattung
Für die erfolgreiche Ausgründung des Projekts wird gemeinsam mit Expertinnen und Experten rund um das Thema Kostenerstattung an einer passenden Markteintrittsstrategie gearbeitet. Dabei stellt die Orthese von „3Digity“ ein neues Angebot dar, das in dieser Form nicht marktverfügbar und dementsprechend auch nicht im Hilfsmittelverzeichnis zu finden ist. Das Eintragen einer neuen Kategorie ist durch ein Start-up nicht leistbar, da nur durch den G‑BA (Gemeinsamer Bundesausschuss) Änderungen möglich sind. Dieser Prozess kann mehrere Jahre dauern, sodass in der Konsequenz andere Möglichkeiten der Erstattung notwendig sind. Diese werden derzeit geprüft.
Notwendige klinische Prüfungen
Das Projekt sieht vor, die Orthese auf ihre klinische Evidenz hin zu prüfen. Dies ist zum einen Anspruch der Projektbeteiligten, zum anderen Notwendigkeit im Zuge der neuen MDR und für eine spätere Erstattungsfähigkeit.
Zum aktuellen Zeitpunkt (Stand: Januar 2023) wurde bereits eine vorbereitende Studie durchgeführt, um Daten zur Physiologie der Hand zu sammeln. Im Zuge dessen wurden Hände von 60 freiwilligen gesunden Personen anatomisch vermessen und die Kraft der Finger bestimmt. Diese physiologischen Daten sind wertvoll zur Bestimmung der dreidimensionalen und mechanischen Anforderungen, die die Orthese erfüllen muss, um in der breiten Bevölkerung angewendet werden zu können.
Fazit und Ausblick
Die motorisierte Fingerbewegungsorthese von „3Digity“ hat nach Auffassung der Autoren das Potenzial, die Fingerrehabilitation neu zu definieren. Durch den individuell an die zu versorgenden Patientinnen und Patienten angepassten Aufbau wird eine auf die jeweilige Indikation zugeschnittene bequeme und schnelle Rehabilitationsbehandlung ermöglicht. Die Patientinnen und Patienten würden dadurch ermächtigt, ihre Behandlung zu Hause selbst durchzuführen, was voraussichtlich zu einer erhöhten Compliance und damit zu guten klinischen Ergebnissen führen wird. Ziel ist es, einen reibungslosen Einsatz in der medizinischen Patientenversorgung zu gewährleisten.
In den nächsten Monaten (Stand: Januar 2023) wird intensiv an der technischen Weiterentwicklung der Prototypen gearbeitet. Anfang 2024 endet der EXIST-Forschungstransfer, sodass bis dahin die notwendigen Vorarbeiten für die Zertifizierung und den Markteintritt abgeschlossen sein sollen.
Außerdem wird eruiert, auf welche Art und Weise das Produkt am besten in bestehende Versorgungsprozesse integriert werden kann, um eine gute zukünftige Zusammenarbeit mit allen Beteiligten zu ermöglichen. Dafür sucht das Forscherteam noch interessierte Kooperationspartner.
Interessenkonflikt
Die Autoren sind Teil des „3Digity”-Teams und haben damit ein Interesse am klinischen und wirtschaftlichen Erfolg des Projektes.
Für die Autoren:
Dr. Julie Kux
Forschung & Entwicklung,
Klinik für Unfallchirurgie,
Orthopädie und Plastische Chirurgie der Universitätsmedizin Göttingen
Von-Siebold-Str. 3
37075 Göttingen
julie.kux@med.uni-goettingen.de
Begutachteter Beitrag/reviewed paper
Kux J, Bravo M, Hettenhausen T, Bartels V, García C, Bauer S, Schilling AF. Fingerbewegungsorthese zur Unterstützung der Rehabilitation nach Fingerverletzungen. Orthopädie Technik, 2023; 74 (1): 50–55



- Dynamische Hüftabduktions-Lagerungsorthese zur Behandlung pathologisch veränderter Hüften bei neuromuskulären Erkrankungen in der Kinderorthopädie — 5. Juni 2025
- Ein neuronal gesteuertes Exoskelett in der Therapie von Patientinnen und Patienten mit Querschnittlähmung — 5. Juni 2025
- Digitale Wunddokumentation: Warum Papier keine Option mehr ist — 5. Juni 2025
- Deutsche Gesetzliche Unfallversicherung. Arbeitsunfallgeschehen 2020, 09/2021 [online]: https://publikationen.dguv.de/zahlen-fakten/schwerpunkt-themen/4271/arbeitsunfallgeschehen-2020 [08.12.2022]
- Deutsche Gesellschaft für Handchirurgie. Jahresbericht des HandTraumaRegister, 17.03.2021 [online] https://www.handtraumaregister-dgh.de/root/news-detail?tx_news_pi1%5Baction%5D=detail&tx_news_pi1%5Bcontroller%5D=News&tx_news_pi1%5Bnews%5D=164&cHash=3f743cc3fa77424525425afa75011b94 [08.12.2022]
- Loos, B. et al. Operative Therapie bei geschlossenen Handfrakturen (Teil 1)“ in Chirugische Allgemeine Zeitung, 2003, [online]: https://www.uk-erlangen.de/fileadmin/einrichtungen/plastische_chirurgie/dateien/Fachinformationen/Geschlossene_Handfrakturen__Teil_I_.pdf [08.12.2022]
- Thelen, S. Wildolf, J. Finger- und Mittelhandfrakturen in Orthopädie und Unfallchirurgie up2date, 2019; 14 (5): 495–514 [online] https://www.thieme-connect.de/products/ejournals/pdf/10.1055/a‑0609–9878.pdf [08.12.2022]
- Bundesverband selbstständiger Physiotherapeuten: Fachkräftemangel. Keine Besserung in Sicht, 04.03.2020 [online] https://ifk.de/artikel/fachkraeftemangel-keine-besserung-sicht [08.12.2022]
- Statista GmbH, Fachkräftemangel in Deutschland, 2022, [online] https://de.statista.com/statistik/studie/id/115581/dokument/fachkraeftemangel-in-deutschland/[08.12.2022]
- Deutscher Verband für Physiotherapie. Wartezeitenbarometer Physiotherapie belegt – zeitnaher Versorgungsbeginn ist eingeschränkt!, 17.07.2018, [online] https://www.physio-deutschland.de/fileadmin/data/bund/news/Pressemitteilungen/PM_Wartezeitenbarometer_Physiotherapie_7_2018.pdf [08.12.2022]
- Vester, Helen et al. Frühfunktionelle Nachbehandlung von Hand- und Fingerverletzungen in Orthopädie & Rheuma 19, 23–16 2016, [online] https://link.springer.com/article/10.1007/s15002-016‑0868‑6 [08.12.2022]
- Johner Institut GmbH. Instituts-Journal Ausgabe 13/22, 2022 [online] https://www.johner-institut.de/gratis-angebote/instituts-journal/ [08.12.2022]