Einleitung
Die Einführung des mikroprozessorgesteuerten Kniegelenksystems C‑Leg im Jahre 1997 löste mit inzwischen über 60.000 Versorgungen eine nachhaltige Revolution in der Prothetik aus. Mit dem C‑Leg wurde ein neuer Sicherheitsstandard durch die zuverlässige Unterstützung des Gehens in der Ebene mit verschiedenen Geschwindigkeiten und des Abwärtsgehens auf Treppen und Rampen erreicht 1. Dieser Erfolg wurde durch eine in der Exoprothetik von keinem Produkt auch nur annähernd erreichte Vielzahl klinischer Studien belegt 2 3. Das C‑Leg hat bis heute im direkten Vergleich mit anderen Kniegelenken eine herausragende Stellung bezüglich Funktionalität und Sicherheit 4. C‑Leg-Anwender profitieren vor allem durch 5:

- eine deutliche Reduktion der Sturzhäufigkeit,
- eine Steigerung der geteilten Aufmerksamkeit,
- gesteigerte Aktivität,
- einen größeren Bewegungsradius und
- gestärktes Vertrauen in die Prothese.
Das C‑Leg legt den Fokus auf Sicherheit und zuverlässige Unterstützung der Grundfunktionen für uneingeschränkte Außenbereichsgeher. Die Weiterentwicklungen Genium und Genium X3 legen einen zusätzlichen Schwerpunkt auf die physiologischere Gestaltung des Gangbilds (OPG – Optimized Physiological Gait), um damit eine deutliche Verringerung der Ungleichheit zwischen natürlicher Körperfunktion und künstlichem Ersatz zu erreichen. Zusätzlich werden verschiedene Aktivitäten des täglichen Lebens abseits des zyklischen Gehens durch Funktionen unterstützt, die nicht wie Zusatzmodi bewusst aktiviert werden müssen, sondern den Anwender im Alltag möglichst intuitiv in der Situation unterstützen, ohne seine Aufmerksamkeit zu benötigen 6. Das Genium stellt damit heutzutage den Stand der Technik in der Versorgung von Oberschenkelamputierten dar.
Nach wie vor gibt es jedoch eine breite Basis von C‑Leg-Anwendern. Um die wichtigsten Kundenwünsche dieser Anwendergruppe zu erfüllen und ihnen den aktuellen technologischen Fortschritt zugänglich zu machen, hat sich Ottobock dazu entschlossen, das C‑Leg zu überarbeiten (Abb. 1). Dabei wurden eine einfachere Auslösung der Schwungphase, eine geringere Bauhöhe, damit auch kleinere Anwender von funktionelleren Füßen profitieren können, ein verbessertes Mensch-Maschine-Interface (Fernbedienung) und ein besserer Schutz vor Beschädigung durch Feuchtigkeit umgesetzt. Im Rahmen des Redesigns sollte auch Bewährtes durch neueste Technologie verbessert werden. Dabei blieb man der Produktpositionierung treu: Das C‑Leg soll die Grundfunktionen für einen unbeschränkten Außenbereichsgeher zuverlässig und sicher unterstützen.
Technologie
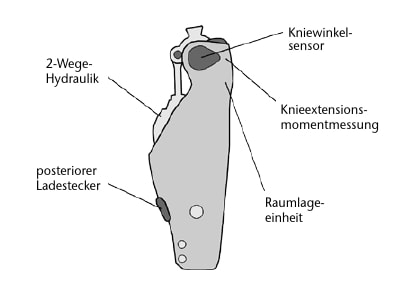
Das neue C‑Leg bleibt weiterhin ein mikroprozessorgesteuertes, einachsiges Kniegelenksystem. Es verwendet eine Hydraulik mit dem bereits bekannten 2‑Wege-Prinzip, bei der die Widerstände in Flexions- und Extensionsrichtung unabhängig voneinander durch den Mikroprozessor stufenlos verstellt werden können 7. Die Abtastfrequenz wurde auf 100 Hz erhöht. Ein großer technologischer Fortschritt ist die Einführung einer neuartigen 6‑achsigen IMU (Inertial Motion Unit), die mit einem eigenen Mikroprozessor die Lage des Kniegelenks im Raum berechnet. So stehen dem Steueralgorithmus Informationen über den Raumwinkel, die Rotation im Raum und die Beschleunigung des Knies in allen 3 Koordinatenachsen zur Verfügung. Die Einführung dieser Technologie ermöglichte den Verzicht auf den – beim Vorgängermodell nicht immer beliebten – elektronischen Rohradapter. Zur Kraftmessung wird nun das Knieextensionsmoment erfasst (Abb. 2), welches zusammen mit der IMU und einem Kniewinkelsensor zuverlässig Informationen über den Bewegungs- und Belastungszustand der Prothese gibt.
Grundfunktionen
Neue Schwungphaseneinleitung
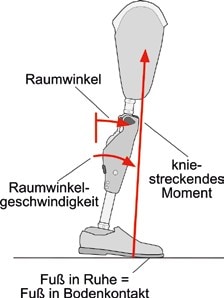
Die Aufgabe der Schwungphasenauslösung ist das Erkennen der terminalen Standphase, da hier der Beugewiderstand in Vorbereitung für die Einleitung der Schwungphase niedrig gestellt werden soll. In der späten Standphase kann das unbemerkt und sicher geschehen, weil das Kniegelenk durch den am Fuß vorgerückten Kraftvektor in den Extensionsanschlag gedrückt wird und so nicht unkontrolliert einknicken kann. Während Ottobock in den 90er Jahren mit der Messung des Knöchelmomentes die damals technologisch fortschrittlichste Erkennung dieses Zeitpunktes verwendete, ist es heute möglich, durch die IMU und einen patentierten Algorithmus die terminale Standphase direkter zu bestimmen. Schlussendlich ist die terminale Standphase durch eine Vorwärtsneigung und Vorwärtsrotation des Beins unter Belastung definiert 8. Die IMU ermittelt dabei direkt die Information, die bei den Vorgängermodellen noch durch die Knöchelmomentenmessung (damals bestmöglich) geschätzt wurde 9. Neben der Vorwärtsneigung und der Vorwärtsrotation sind der Bodenkontakt des Fußes (Fuß in Ruhe) und ein streckendes Moment im Knie Kriterien für die Einleitung der Schwungphase (Abb. 3). Der neue Algorithmus ist dadurch gewichtsunabhängiger, erlaubt kleinere Schritte und den besseren Übergang in die Schwungphase auf weichem sowie unebenem Untergrund. Die ersten Schritte mit dem neuen C‑Leg sind somit leichter zu erlernen. Auch sicheres Rückwärtsgehen ist möglich, da die Schwungphase beim Rückwärtsgehen nicht mehr ausgelöst werden kann.
Verbesserte Schwungphasenregelung
Die Schwungphasenregelung konnte dank erhöhter Prozessorleistung und komplexerer Regelungstechnik gegenüber dem Vorgängermodell optimiert werden. Sie bietet noch weniger Widerstand beim langsamen Gehen und mehr Dynamik beim schnellen Gehen 10. Zusätzlich wird nun auch die Schwungphasenextension in Echtzeit an die Gehgeschwindigkeit angepasst. Der Extensionswiderstand wird beim langsamen Gehen erhöht, sodass das Knie langsamer nach vorne schwingt und einen harmonischeren Bewegungsablauf ermöglicht.
Erhöhter Stolperschutz
Alle mechatronischen Ottobock-Kniegelenke bieten wegen der 2‑Wege-Hydraulik und des „default stance“-Verhaltens inhärente Sicherheit während der Schwungphasenextension, in der ein Hängenbleiben mit der Zehe vorkommen kann. Da das Flexionsventil während der Extensionsbewegung schon präventiv auf Standphasenwiderstand eingestellt ist, wird der unterstützende Widerstand bei einer Bewegungsumkehr durch ein Stolpern sofort wirksam. Der erhöhte Stolperschutz erweitert dieses Konzept. Der Flexionswiderstand wird während der Schwungphasenextension kniewinkelabhängig über den Wert der Standphase hinaus erhöht. So wird beim Stolpern, bei dem das Gelenk plötzlich mit hohen Kräften in gebeugter Stellung belastet wird, zusätzliche Unterstützung gegeben. Anders als beim Vorgängermodell, wo der Stolperschutz erst durch einen Zehenkontakt aktiviert wurde, ist der Stolperschutz beim neuen C‑Leg bei jeder Schwungphasenextension präventiv aktiv. Außerdem wurde der Widerstandswert für noch mehr Unterstützung erhöht.
Gehen mit Standphasenflexion
Das neue C‑Leg bietet die vom Vorgängermodell gewohnte Unterstützung bei der Standphasenbeugung. Der Beugewiderstand wird vom Orthopädie-Techniker über die PC-Software eingestellt, aber nicht wie beim Genium in Echtzeit geregelt, sodass die Standphasenbeugung beim ebenen Gehen wie beim Vorgängermodell nicht begrenzt wird. Durch konstruktive Änderungen in der Hydraulik können nun für die Standphasenextension höhere Extensionswiderstände erreicht werden. Zusammen mit einer automatischen Regelung der Standphasenextension wird so eine wesentlich harmonischere Streckung bei der Standphasenextension gewährleistet. Vor allem für einige schwere Anwender sowie bei Hüftex-Versorgungen können daher im Vergleich zum Vorgängermodell bessere Ergebnisse erzielt werden.
Funktionen und Modi
Wie beim Vorgängermodell bietet das neue C‑Leg eine Stehfunktion, die über ein Bewegungsmuster (Beugen – Halten – Strecken – Halten) aktiviert werden kann. Zusätzlich gibt es die Wahl einer intuitiven Stehfunktion, die das Gelenk blockiert, wenn es in gebeugter Position ruhig gehalten wird. Durch die IMU wird das Ende des Stehens zuverlässig erkannt und eine unerwünschte Aktivierung der Stehfunktion im Sitzen verhindert. Die Sitzfunktion schaltet das Gelenk in einen niedrigen Widerstand, um das Manipulieren des Unterschenkels im Sitzen zu erleichtern.
Wie vom Vorgängermodell gewohnt, gibt es zwei programmierbare Modi („2nd Mode“ und „3rd Mode“), die nun über 3- bzw. 4‑maliges Wippen auf dem Vorfuß, gefolgt von einem Beistellen des Prothesenbeins zur kontralateralen Seite, aktiviert werden können. Anwendertests haben gezeigt, dass dieses Muster den Anwendern leichter fällt als das Bewegungsmuster des Vorgängermodells (Wippen auf Zehe und Ferse gefolgt von einem Entlasten), vor allem da der Einbeinstand während des Entlastens entfällt.
Design für den Alltag
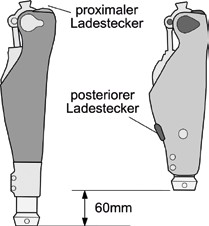
Das neue C‑Leg ist mit 289 mm distaler Systemhöhe 60 mm kürzer als das Vorgängermodell, was es erleichtert, Anwender mit orthopädietechnisch herausfordernden Gegebenheiten zu versorgen und funktionellere, höher bauende Füße zu verwenden (Abb. 4). Es ist für 136 kg Körpergewicht freigegeben. Zum Schutz gegen Feuchtigkeit wurde es wetterfest gemacht. Spritzwasser, Regen oder ein kurzer Süßwasserschwall schaden dem Gelenk nicht. Längeres Untertauchen und korrosive Medien wie zum Beispiel Salz- oder Chlorwasser bleiben aber dem Genium X3 vorbehalten. Die Position des Ladesteckers wurde an den posterioren Unterschenkel verlegt, um das Eindringen von Wasser zu verhindern und eine bessere kosmetische Versorgung im Kniebereich zu ermöglichen. Der Beugewinkel wurde auf 130° erhöht. Um das Gelenk vor Beschädigungen durch den Schaft zu schützen, gibt es die Möglichkeit, den maximalen Beugewinkel durch Anschlagselemente um 8° zu verringern.
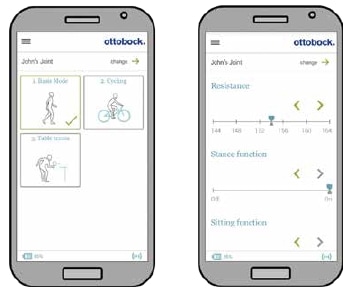
Um das Mensch-Maschine-Interface zu verbessern, wurde eine Bluetooth®-Schnittstelle in das Gelenk integriert. Dadurch wurde es möglich, eine Android-App zum Wechseln der Modi, zum Feinjustieren von Einstellwerten und zum Abrufen von Informationen der Prothese anzubieten, die das moderne, intuitive Userinterface von Smartphones nutzt (Abb. 5). Die App läuft auf allen gängigen Android-Smartphones. Besondere Anforderungen von Apple an die Bluetooth®-Hardware erlauben es leider momentan technologisch nicht, eine iOS-App anzubieten. Alternativ kann die Ottobock Remote Control 4X350 verwendet werden. Die Bluetooth®-Schnittstelle lässt sich deaktivieren, beispielsweise während einer Flugreise. Die maximale Lautstärke des Beepers (akustischer Signalgeber) wurde erhöht; das akustische Signal lässt sich nun in Lautstärke und Tonhöhe einstellen.
Zum Schutz des Gelenks wurde ein zeitgemäßer Protektor entwickelt, dessen Gestaltung dem wachsenden Selbstvertrauen von Amputierten gerecht werden soll (Abb. 6). Durch eine innovative textile Lösung wurde der Spalt zwischen Protektor und Fußkomponente geschlossen. Wechselbare Schutzblenden ermöglichen dem Anwender eine Individualisierung seiner Prothese (Abb. 7). Das neue C‑Leg ist in den zwei Farbstellungen „Volcano Shadow“ und „Desert Pearl“ erhältlich, um auf Vorlieben der Anwender eingehen zu können (siehe Abb. 1).
Anwendungstechnik durch den Orthopädie-Techniker
Das zertifizierte Fachpersonal kann mittels einer PC-Einstellsoftware (C‑Soft Plus) und der im neuen C‑Leg integrierten Bluetooth®-Schnittstelle die Einstellungen anpassen. Die Einstellsoftware unterstützt die Einstellung mit patientenindividuellen Vorschlägen und leitet durch den Aufbau der Prothese. Die Aufbauempfehlung entspricht der Ottobock-Standardempfehlung für monozentrische, mechatronische Kniegelenksysteme. Durch den Entfall des elektronischen Rohradapters ist kein spezieller Rohradapter mehr notwendig. Standardadapter mit 34 mm Durchmesser können verwendet werden. Ein Aktivitätsreport ermöglicht dem Orthopädie-Techniker eine Dokumentation des Therapieerfolgs.
Fazit
Seit seiner Markteinführung hat das C‑Leg die Beinprothetik nachhaltig revolutioniert. Dank des technologischen Fortschritts gibt es bei der neuen Generation des C‑Leg eine weitere Verbesserung der Grundfunktionalität bei kleinen Schritten, beim Gehen auf weichen Untergründen, beim Rückwärtsgehen und beim Gehen mit verschiedenen Geschwindigkeiten. Die intuitive Stehfunktion unterstützt das Stehen und entlastet damit die erhaltene Seite. Durch die Verkürzung der Bauhöhe können nun mehr Anwender vom C‑Leg profitieren und funktionellere Füße verwendet werden. Die nachgewiesene C‑Leg-Funktionalität wurde auf den neuesten technologischen Stand gebracht und ist damit „fit und wetterfest“ für die nächsten Jahre.
Für die Autoren:
Dipl.-Ing. Philipp Kampas, MBA
Otto Bock Healthcare GmbH
Brehmstraße 16
A‑1110 Wien
Philipp.Kampas@ottobock.com
Begutachteter Beitrag/reviewed paper
Kampas Ph, Seifert D. Das neue C‑Leg: neue Funktionen und neue Technologie. Orthopädie Technik, 2015; 66 (10): 46–49



- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Kampas P, Bellmann M, Weigl-Pollack A. Das neue C‑Leg und seine erweiterten Funktionen. Orthopädie Technik, 2011; 62 (10): 722–727
- Otto Bock HealthCare Deutschland GmbH (Hrsg). Internationale Studien zum C‑Leg. Literaturübersicht. 3., aktualisierte Auflage. Duderstadt: Otto Bock, 2014. http://professionals.ottobock.de/cps/rde/xbcr/ob_de_de/646B33-D-01–1001w.pdf (Zugriff am 09.09.2015). Bestellnummer: 646B33=D‑06–1403
- Quake T, McGarry A. Microprocessor-Controlled Knees – A Review Of The Literature. Proceedings of the ISPO 2013 World Congress. Hyderabad, 2013
- Thiele J, Westebbe B, Bellmann M, Kraft M. Designs and performance of microprocessorcontrolled knee joints. Biomed Tech, 2014; 59 (1): 65–77
- Otto Bock HealthCare Deutschland GmbH (Hrsg). Internationale Studien zum C‑Leg. Literaturübersicht. 3., aktualisierte Auflage. Duderstadt: Otto Bock, 2014. http://professionals.ottobock.de/cps/rde/xbcr/ob_de_de/646B33-D-01–1001w.pdf (Zugriff am 09.09.2015). Bestellnummer: 646B33=D‑06–1403
- Kampas P, Seyr M. Technologie und Funktionsweise des Genium Prothesenkniegelenks. Orthopädie Technik, 2011; 62 (12): 898–903
- Kampas P, Bellmann M, Weigl-Pollack A. Das neue C‑Leg und seine erweiterten Funktionen. Orthopädie Technik, 2011; 62 (10): 722–727
- Perry J. Gait Analysis. Normal and Pathological Function. Thorofare, New Jersey: Slack Inc., 1992
- Kampas P, Bellmann M, Weigl-Pollack A. Das neue C‑Leg und seine erweiterten Funktionen. Orthopädie Technik, 2011; 62 (10): 722–727
- Kraft M. Functional Outcomes of Different Microprocessor Controlled Knees – A Technological Study. Proceedings of the ISPO 2015 World Congress. Lyon, 2015
