Einleitung
Konventionelle Prothesenfüße nutzen üblicherweise elastische Materialien aus Kohlefaser oder Elastomere, um Flexibilität und Dämpfung zu bieten. Die elastischen Komponenten variieren je nach Gewichtsklasse und Mobilitätsgrad des Anwenders. Schon durch eine passive Hydraulik konnte beim mechanischen Echelon®-Prothesenfuß eine signifikant gesenkte Belastungsrate am Stumpf festgestellt werden 1. Aber während solche aufwendigeren mechanischen Systeme mit einstellbarer Dämpfung eine feinere Anpassung ermöglichen, können sie sich dennoch nicht an ständig wechselnde Alltagsituationen anpassen. Konventionelle Prothesen sind grundsätzlich für ebenes Gehen mit einer bestimmten Geschwindigkeit optimiert. Folglich muss der Anwender seinen Gang den wechselnden Untergründen und Situationen anpassen und diese kompensieren, was Aufmerksamkeit kostet und belastend für den Körper sein kann.

Anwender sind in ihrem Alltag jedoch mit vielen unterschiedlichen Situationen, Untergründen und Hindernissen konfrontiert: Steigung oder Gefälle, Kopfsteinpflaster, Bordsteinkanten oder Schlaglöcher, unebene Wege oder Grünflächen sowie Treppen sind nur einige der alltäglichen Hürden, deren Überwindung herausfordernd ist. Ein Prothesenfuß sollte zudem eine gute Bodenfreiheit bieten, aber auch unterschiedliche Gehgeschwindigkeiten, stabiles Stehen und eine natürliche Position beim Sitzen ermöglichen, damit diese Tätigkeiten über längere Zeit bequem möglich sind. Auch das Tragen unterschiedlicher Schuhe und Absatzhöhen ist mit konventionellen Prothesenfüßen nur eingeschränkt möglich.
Bei mechatronischen Kniegelenken wie C‑Leg oder Genium sind durch Sensoren, Software und eine mikroprozessorgeregelte Hydraulik schon länger Anpassungen an unterschiedliche Situationen, verschiedene Gehgeschwindigkeiten und ein sichereres Gehen im Vergleich zu rein mechanischen Knieprothesen möglich 23. Auch bei den Fußprothesen eröffnen Sensoren, ein Hydraulikzylinder und eine Mikroprozessorregelung die Möglichkeit einer Anpassung an den individuellen Anwender und die momentane Situation bzw. das Gelände und somit deutliche Verbesserungspotenziale im Alltag. So konnte beim mechatronischen Prothesenfuß Proprio® im Vergleich zu mechanischen Prothesen z. B. eine statisch signifikante Reduktion der Energiekosten beim Gehen in der Ebene 4, eine verbesserte Kinematik und Kinetik des Gangs 5 und eine bessere Gangsymmetrie beim Hinuntergehen auf Rampen und beim Treppaufgehen 67 nachgewiesen werden. Zudem konnte durch die Anpassungsfähigkeit im Knöchel eine gleichmäßigere Druckverteilung an der Verbindung zwischen Stumpf und Schaft erzielt werden 8.
Ottobock hat mit dem Meridium (Abb. 1) einen neuen Prothesenfuß entwickelt, der sich aufgrund des besonderen Aufbaus und der hochgradig anpassungsfähigen Funktion deutlich von anderen Produkten unterscheidet: Wesentliche Merkmale sind die Echtzeitanpassung, der besonders große Bewegungsumfang sowie die 4‑Achs-Kinematik, die Knöchel‑, Fuß- und Zehenbereich zueinander beweglich macht.
Technologie
Konzept
Bisherige Lösungsansätze bei situativ anpassungsfähigen Fußprothesen kombinieren üblicherweise einen traditionellen Karbonfederfuß mit einer mikroprozessorgesteuerten Knöcheleinheit. Auf diese Weise bleiben Energierückgabe und Dynamik regulärer Karbonfederfüße erhalten. Der Anteil am gesamten Bewegungsumfang des Prothesenfußes, der kontrolliert werden kann, ist jedoch im Wesentlichen auf den mikroprozessorgeregelten Bewegungsumfang im Knöchelbereich begrenzt. Kommt die Flexibilität eines Prothesenfußes vor allem durch elastische Elemente und nicht durch die mikroprozessorgeregelten beweglichen Komponenten zustande, ist die mögliche situationsabhängige Anpassung an wechselnde Bedingungen dadurch konstruktionsbedingt relativ gering.
Beim Meridium-Prothesenfuß wurde ein neues Konzept verfolgt, bei dem die Anpassung weitestgehend durch eine hydraulisch geregelte 4‑achsige Konstruktion erfolgt. Dadurch ist erstens ein großer Bewegungsumfang von über 36° möglich, und zweitens kann die Bewegung gut kontrolliert und bei wechselnden Bedingungen in weitem Rahmen angepasst werden (Abb. 2–4). So sind beispielsweise auch beim Stehen auf unebenem Terrain eine Anpassung im Knöchelgelenk und zugleich ein stabiler Stehanschlag möglich, der eine Dorsalflexion verhindert.
Aufbau und Komponenten
Zehenplatte, Fußsegment und Knöchelsegment sind über die 4‑Achs-Kinematik beweglich miteinander verbunden. Das ermöglicht eine Anpassung an die natürlichen Bewegungen beim Gehen. Die bewegliche Zehenplatte initiiert eine unterstützende Plantarflexion am Ende der Standphase und ermöglicht zudem eine große Auflagefläche beim Abrollen und beim Tragen von Schuhen mit höheren Absätzen.
Die Bewegungen, die auftretenden Kräfte und die Lage im Raum werden von Winkel- und Momenten-Sensoren sowie einer IMU („Inertial Motion Unit“) bestehend aus 3D-Lagesensor und Gyroskop und eigenem Prozessor zur Datenverarbeitung erfasst. Die Steuereinheit passt die Hydraulik 100-mal pro Sekunde in Echtzeit den Bedürfnissen des Nutzers und der Situation an. Der zentrale Mikroprozessor, die Batterie mit einem Tag Autonomie und Bluetooth® für die drahtlose Verbindung sind im wetterfesten Meridium-Prothesenfuß integriert.
Die Hydraulik steuert Plantar- und Dorsalflexionswiderstand des Fußes unabhängig voneinander, was eine besonders differenzierte Anpassung an unterschiedliche Situationen ermöglicht, gleichgültig ob beim Stehen oder Gehen, auf ebenem Boden oder in geneigtem Gelände. Der Bewegungsumfang beträgt 14,5° in Dorsalflexion und 22° in Plantarflexion um die Neutralstellung.
Beim Setup der Prothese werden Plantar- und Dorsalflexionsgrundwiderstand auf die Bedürfnisse des Anwenders eingestellt; die situationsabhängige Anpassung im Alltag regelt der Fuß dann selbstständig. Der Anwender kann auch selbst die Einstellungen des Basismodus geringfügig anpassen. Der Orthopädie-Techniker kann für den Anwender zusätzlich bis zu drei „MyModes“ genannte Zusatzmodi einstellen, die spezielle Tätigkeiten erleichtern, z. B. das Training auf einem Fitnessgerät.
Im Vergleich mit einem konventionellen Karbonfuß bedingen die zusätzlichen Komponenten und die Technologie ein höheres Prothesengewicht und ein voluminöseres Fußteil. In einer Datenerhebung bei 10 Testversorgungen mit transtibial (TT) und transfemural (TF) amputierten Anwendern waren 3 Personen mit der größeren Form des Fußes unzufrieden, und 2 Personen nannten das höhere Gewicht des Meridium als Grund, den Fuß nicht zu wählen. Ob der individuelle Nutzen durch die Anpassungsfähigkeit die konstruktionsbedingten Einschränkungen überwiegt, sollte individuell für jeden Prothesenträger beurteilt werden. Eine Untersuchung des mechatronischen Prothesenfußes Proprio®, dessen Gewicht ähnlich ist, hat gezeigt, dass dieser „trotz des zusätzlichen Prothesengewichts […] durch die situative Anpassungsfähigkeit Vorteile bieten sollte für aktive TT-Amputierte, deren Muskelkraft kein Handicap darstellt“ 9. Um die Auswirkung des Gewichts für den Anwender zu reduzieren, wird zudem für den Meridium-Prothesenfuß die Kombination mit einem Unterdrucksystem empfohlen. Damit kann der Hub limitiert werden; das höhere Gewicht bleibt aber spürbar, z. B. bei längerem Tragen oder beim Heben des Beins im Sitzen.
Anwenderbedürfnisse und Funktionen
Bodenfreiheit
Bei rein mechanischen Füßen federt am Ende der Standphase der Vorfuß beim Abheben zurück in die beim Prothesenaufbau eingestellte Ausgangsposition. Abgesehen von der Absatzhöhe von ca. 1 cm bilden Fußsohle und Unterschenkel somit einen Winkel von etwa 90°. Während Nichtamputierte beim Durchschwingen den Vorfuß anheben, um nicht mit den Zehen hängenzubleiben, ist dies mit konventionellen, mechanischen Prothesenfüßen nicht möglich. Amputierte mit diesen Prothesen müssen aus Hüfte und Knie heraus Ausgleichsbewegungen vollziehen, um nicht hängenzubleiben, denn ein Hängenbleiben birgt das Risiko von Stürzen und Verletzungen 1011. Die Elektronik im Meridium hingegen hält den Fuß nach dem Abrollen in einer dorsalflektierten Stellung, was gegenüber einer konventionellen, mechanischen Prothese zusätzliche Bodenfreiheit beim Durchschwingen erzeugt.
Steigungen und Gefälle
Bei einer Steigung muss der Träger eines mechanischen Prothesenfußes die im Knöchelbereich fehlende Anpassungsfähigkeit kompensieren. Bergauf entstehen deutlich größere Belastungen an Stumpf und Bewegungsapparat. Untersuchungen von Fradet et al. mit 16 Unterschenkelamputierten zeigen, dass „beim Bergaufgehen die Dorsalflexion des anpassungsfähigen mechatronischem Proprio®-Fußes sowohl die erhöhte Knieflexion auf der amputierten Seite als auch die erhöhte Plantarflexion des kontralateralen Fußes reduzieren konnte“ 12.
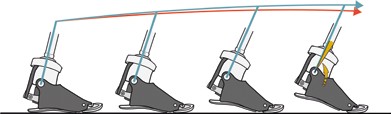
Doch bei den mechatronischen Prothesenfüßen erfolgt eine Anpassung der Dorsalflexion an eine Steigung oft nur verzögert ab dem zweiten oder dritten Schritt oder in eingeschränktem Ausmaß. Der Meridium-Prothesenfuß hingegen passt sich in Echtzeit und über den vollen Bewegungsumfang an die Steigung an, d. h., schon beim ersten Schritt auf einer Rampe wird, zusätzlich zum normalen Überrollwinkel, der Knöchelwinkel erweitert (Abb. 5). Während bei ebenem Gehen ein Überrollwinkel von 10° ausreichend ist, wird bergauf sofort ein spürbar erhöhter Bewegungsumfang genutzt. Sollte die Steigung größer als die maximale Dorsalflexion sein, bleibt der Fuß in voll dorsalflektierter Position und ermöglicht so ein einfacheres Bergaufgehen auf dem Vorfuß.
Auch bergab passt sich der Prothesenfuß schon beim ersten Schritt sofort und in vollem Umfang an, da auch dieses Bewegungsmuster einen viel größeren Bewegungsumfang im Knöchel verlangt als beim ebenen Gehen. Am Beginn der Standphase wird dadurch eine erweiterte Plantarflexion ermöglicht, gegen Ende der Standphase eine erweiterte Dorsalflexion. Dadurch kann die Hydraulik einen Teil der beim Bergabgehen freiwerdenden Energie absorbieren.
Unebener Untergrund
Unebenes Gelände wie zum Beispiel Kopfsteinpflaster, Rasen oder Waldwege sowie plötzliche Hindernisse wie Schlaglöcher oder Bordsteinkanten können zum Stolpern und schlimmstenfalls zu Stürzen führen. Der Träger einer Fußprothese muss besonders auf Unebenheiten achten, da die Prothese je nach Untergrund kniebeugend wirken oder einen erhöhten Widerstand gegen das Überrollen erzeugen kann.
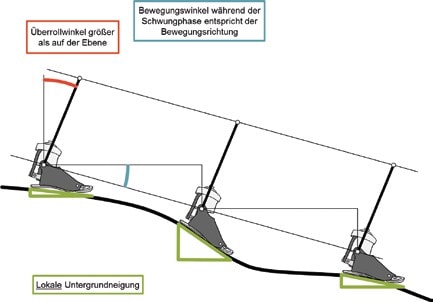
Durch den breiten Anpassungsbereich in A/P‑Richtung kombiniert mit der Echtzeitanpassung gleicht der Meridium-Prothesenfuß Bodenunebenheiten zu einem hohen Grad aus, unabhängig davon, ob der Anwender in der Ebene, eine Rampe hinauf- oder hinuntergeht (Abb. 6). Mit Hilfe der IMU werden lokale Bodenunebenheiten unter dem Fuß unabhängig von der generellen Neigung des Untergrundes bzw. der vertikalen Bewegungsrichtung des Anwenders erkannt. Der Fuß hilft, die Unebenheit auszugleichen; das Überrollverhalten bleibt aber der generellen Neigung des Untergrundes entsprechend. Die Steuerung unterscheidet also zwischen der Untergrundneigung unter dem Fuß im Sinne einer Unebenheit einerseits und der generellen Bewegungsrichtung des Anwenders andererseits. In ersten Versorgungen (88) beurteilten 84 % der Anwender das Gehen in unebenem Gelände als verbessert gegenüber der bisherigen prothetischen Versorgung, darunter energiespeichernde und ‑rückgebende Füße mit und ohne Hydraulik sowie mechatronische Fußprothesen 13.
Ändern der Gehgeschwindigkeit
Im Alltag muss ein Prothesenträger immer wieder die Gehgeschwindigkeit situationsabhängig ändern, z. B. beim Überqueren einer Straße. Der Meridium-Prothesenfuß passt das Überrollverhalten und die Widerstände bei jedem Schritt in Echtzeit der Gehgeschwindigkeit an. Bei niedriger Geschwindigkeit stabilisieren höhere Widerstände den Anwender, und wenn er beschleunigt, erleichtern geringere Widerstände das schnelle Vorankommen.
Trotz der Echtzeitanpassung an die Ganggeschwindigkeit bedingt die Konstruktion, bei der die Bewegung vor allem über die 4‑Achs-Kinematik ermöglicht und durch die Elektronik und Hydraulik gesteuert wird, eine geringe Energierückgabe. Ein Teil der Energie geht in Form von Reibung und folglich Wärme verloren. Die im Vergleich zur Vorversorgung geringere Dynamik war bei 38 % der Anwender der ersten 88 Versorgungen ein Grund für weniger Interesse am Prothesenfuß 14. Für sehr schnelle Bewegungen wie z. B. Springen und Rennen ist der Fuß nicht geeignet, daher kann für diese Aktivitäten eine Sportprothese als Ergänzung sinnvoll sein. Aber schon beim Echelon®-Fuß gelangten De Asha et al. zu dem Schluss, dass trotz der Energiedissipation durch die Hydraulik die Verminderung des „Bremseffekts“ in der frühen bis mittleren Standphase wichtiger sein kann und dass die Energierückgabe nicht zwingend das entscheidende Design-Kriterium für einen Prothesenfuß sein muss 1516.
Stabiles Stehen
Für den Prothesenträger bedeutet eine konventionelle mechanische Fußprothese, einen Kompromiss zwischen Flexibilität beim Gehen und Stabilität beim Stehen einzugehen. Daher wurde beim Meridium-Prothesenfuß nicht nur eine Anpassung an Gehbewegungen integriert, sondern auch eine Anpassung an das Stehen. Die Sensoren der Inertial Motion Unit (IMU) und der Knöchelmomentsensor erkennen, wenn der Anwender steht, und bieten ihm durch Schließen des Dorsalflexionsventils einen stabilen Stehanschlag. Die Plantarflexion bleibt währenddessen gering gedämpft, um dem Anwender ausreichend Beweglichkeit zu gewähren. Sobald die Sensoren wieder eine Gehbewegung feststellen, wird der Stehanschlag gelöst.
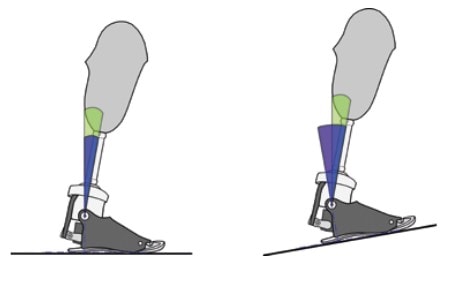
Steht der Anwender auf geneigtem Untergrund, passt sich der Prothesenfuß mit Hilfe der Situationserkennung und seines großen Bewegungsspielraums in Echtzeit an das Stehen und die Neigung an und ermöglicht so eine natürlichere Position des Unterschenkels und einen stabilen Stand (Abb. 7). Bei der oben erwähnten Datenerhebung bei Testversorgungen bewerteten 9 von 10 Anwendern das Stehen auf der Schräge mit dem Meridium-Prothesenfuß als besser oder viel besser im Vergleich zu ihrer bisherigen Prothese.
Treppabgehen
Beim Treppabgehen setzt ein Fußamputierter normalerweise die Prothese halb über den Stufenrand auf, um die fehlende Beweglichkeit im Knöchel durch ein Abrollen des Fußes über die Stufenkante auszugleichen. Wenn man aber den Fuß nur halb auf der Stufe aufsetzt, verringert das die Auflagefläche und birgt somit das Risiko abzurutschen.
Der Meridium-Prothesenfuß kann das Bewegungsmuster „Treppabgehen“ erkennen und es vom Gehen auf einer Rampe oder in der Ebene unterscheiden. Besonders wichtig für die Sicherheit ist hier die Echtzeitanpassung mit großem, geregeltem Bewegungsspielraum ab dem ersten Schritt. Bei einem Schritt treppab kann der Fuß vollflächig auf die Stufe aufgesetzt werden, und die Steuerung ermöglicht ein erweitertes Überrollen, um die Treppe hinabzugehen. Der Meridium-Prothesenfuß kann aber auch nach Belieben bei jedem Schritt in dem von konventionellen Prothesenfüßen bekannten Muster halb über dem Stufenrand und darüber hinaus in jeder Position bis zum vollflächigen Auftritt auf die Stufe aufgesetzt werden. Dadurch ist das Positionieren des Fußes auf der Stufe nicht mehr so kritisch, und der Anwender gewinnt mehr Flexibilität beim Treppabgehen. Da sich die Überrollbewegung beim Treppaufgehen nicht wesentlich von der eines Schrittes in der Ebene unterscheidet, ist in dieser Situation keine spezielle Anpassung außerhalb der regulären Schrittanpassung durch den Meridium-Prothesenfuß notwendig.
Entlastungsfunktion
Beim Sitzen und bei angelehntem Stehen mit dem Prothesenfuß vor dem Knie haben Anwender mit einem konventionellen, mechanischen Prothesenfuß den Nachteil, dass bei geringer Fersenbelastung die Fußspitze sich nicht bzw. kaum zum Boden hin absenkt, wie man es bei einem natürlichen Fuß aber üblicherweise tun würde. Wenn die Fußspitze nach oben zeigt, ist dies für den Anwender optisch unnatürlich und kann auf beengtem Raum auch zur Stolperfalle für andere Personen werden. Zudem wirkt die Fersenlast beim Sitzen verkippend am Schaft und beim angelehnten Stehen kniebeugend.
Der neue Prothesenfuß erkennt die Fersenlast, wenn der Anwender eine Ruheposition einnimmt, und ermöglicht automatisch eine Plantarflexion, bei der sich der Vorfuß zum Boden hin absenkt. Neben dem stabileren vollflächigen Bodenkontakt beim angelehnten Stehen, sogar auf unebenem Untergrund, und der äußerlich natürlicher wirkenden Fußstellung profitieren Anwender von einer bequemeren Position (Abb. 8).
Anpassung der Absatzhöhe
Für Träger von Fußprothesen ist das Wechseln von Schuhen oder das Barfußgehen meistens eine Herausforderung: Die Prothesen werden für eine Standardabsatzhöhe eingestellt, und nur wenige Prothesenfüße ermöglichen es dem Anwender, bei einem Schuhwechsel die Absatzhöhe anzupassen. Ein Wechsel zwischen Schuhen für Beruf und Freizeit oder gar Barfußgehen ist daher mit den meisten Prothesenfüßen schwierig.
Der Meridium-Prothesenfuß bietet eine elektronische Anpassung der Absatzhöhe von 0 bis 5 cm ohne Werkzeuge. Die Anpassung kann nicht nur mittels Smartphone-App, Fernbedienung oder Bewegungsmuster erfolgen, sondern auch automatisch während der ersten Schritte. Zieht der Anwender Schuhe an bzw. aus, erkennt der Meridium-Prothesenfuß die veränderte Situation und ermöglicht eine komfortable Stehposition mit passendem Dorsalanschlag. Für das Gehen passen sich die Eigenschaften des Fußes dann innerhalb weniger Schritte graduell an die neue Absatzhöhe an. So werden bei einem Wechsel der Schuhe Veränderungen in der Statik durch die Elektronik ausgeglichen.
Ergänzende Funktionen
Neben den bisher genannten Anpassungen an Situationen und Untergrund bietet der Meridium-Prothesenfuß auch ergänzende Funktionen wie eine Anpassung an das Rückwärtsgehen und einen Sicherheitsmodus mit anwenderspezifischen Widerständen bei leerem Akku oder als einstellbare Knöchelsperre, um z. B. auf Leitern besser stehen zu können.
Der Prothesenfuß kann mit den mechatronischen Kniegelenken C‑Leg, Genium und Genium X3 kombiniert werden. Das Verhalten des Fußes wird beim Einstellprozess automatisch auf die Verwendung mit den Kniegelenken abgestimmt.
Anwenderprofil
Angesichts der Vorteile, der besonderen Eigenschaften und der technisch bedingten Einschränkungen des neuen Prothesenfußes ergibt sich schließlich die Frage, für welche Anwender er geeignet ist. Studien mit dem mechatronischen Prothesenfuß Proprio® haben gezeigt, dass dieser für aktive TT-Amputierte der Mobilitätsgrade 2 und 3 nützlich sein kann 171819.
Der Meridium-Prothesenfuß wird vom Hersteller für TT- und TF-Anwender des Mobilitätsgrads 3 empfohlen, ist aber auch für die Mobilitätsgrade 2 und 4 zugelassen. Die Daten der ersten Versorgungen (88) und die Datenerhebung bei 10 Testversorgungen zeigen funktionelle Vorteile für eine bestimmte Nutzergruppe: Personen, die ein natürliches Gangbild wünschen, sicher und komfortabel in unebenem Gelände und auf Rampen gehen möchten, die noch nicht so lange amputiert sind (1–4 Jahre seit der Amputation), sowie Genium-Knieprothesenträger mit Mobilitätsgrad 3. Hingegen scheint der Fuß für Personen, die leichte Prothesen mit hoher Energierückgabe bevorzugen, weniger geeignet zu sein. Faktoren wie die Amputationshöhe, das Alter der Anwender und der Mobilitätsgrad spielen insgesamt keine entscheidende Rolle 20. Wie schon erwähnt, waren das höhere Gewicht, die voluminösere Form des Fußes und die fehlende Dynamik die wesentlichen Kritikpunkte.
Das detaillierte empfohlene Anwenderprofil des Herstellers wurde bei den Testversorgungen von 83 % der Orthopädie-Techniker als hilfreich oder sehr hilfreich bewertet. Die Beurteilung, wie nützlich der neue Prothesenfuß für einen Anwender ist, hängt aber letztlich von dessen individuellen Fähigkeiten, Aktivitäten und Lebensumständen ab.
Fazit
Träger von Fußprothesen sind im Alltag mit einer Vielzahl unterschiedlicher Situationen konfrontiert. Der Hersteller ist überzeugt, dass der Meridium-Prothesenfuß durch seine Anpassungsfähigkeit an den individuellen Anwender, an unterschiedliche Situationen und an wechselndes Gelände deutliche Vorteile gegenüber konventionellen, mechanischen Prothesenfüßen bietet. Besonders die höhere Bodenfreiheit in der Schwungphase, die Geländeanpassung in Echtzeit, der intuitive Stehanschlag auch auf unebenem Untergrund und die Möglichkeit, treppab mit vollflächigem Auftritt zu gehen, bieten dem Anwender zusätzliche Sicherheit.
Für die Autoren:
Bernhard Prochaska
Produktmanager Prosthetics – Lower Extremities
Mechatronic Solutions
Otto Bock Austria GmbH
Brehmstraße 16
A‑1110 Wien
Bernhard.Prochaska@ottobock.com
Begutachteter Beitrag/reviewed paper
Prochaska B, Seyr M, Fuchs F. Technologie und Funktionsweise eines neuen 4‑achsigen mikroprozessorgeregelten Prothesenfußes. Orthopädie Technik, 2017; 68 (6): 42–47






- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Portnoy S, Kristal A, Gefen A, Siev-Ner I. Outdoor dynamic subject-specific evaluation of internal stresses in the residual limb: hydraulic energy-stored prosthetic foot compared to conventional energy-stored prosthetic feet. Gait Posture, 2012; 35 (1): 121–125. doi: 10.1016/j.gaitpost.2011.08.021
- Hahn A, Lang M. Effects of Mobility Grade, Age and Etiology on functional benefit and safety of subjects evaluated in over 1200 C‑Leg trial fittings in Germany. Journal of Prosthetics and Orthotics, 2015; 27(3): 86–94
- Hafner BJ, Smith DG. Differences in function and safety between Medicare Functional Classification Level‑2 and ‑3 transfemoral amputees and influence of prosthetic knee joint control. Journal of Rehabilitation Research and Development, 2009; 46(3), 417–433
- Delussu AS, Brunelli S, Paradisi F, Iosa M, Pellegrini R, Zenardi D, Traballesi M. Assessment of the effects of carbon fiber and bionic foot during overground and treadmill walking in transtibial amputees. Gait Posture, 2013; 38 (4): 876–882. doi: 10.1016/j.gaitpost.2013.04.009
- Fradet L, Alimusaj M, Braatz F, Wolf SI. Biomechanical analysis of ramp ambulation of transtibial amputees with an adaptive ankle foot system. Gait Posture, 2010; 32 (2): 191– 198. doi: 10.1016/j.gaitpost.2010.04.011
- Agrawal V, Gailey R, Gaunaurd I, O’Toole C, Finnieston A, Tolchin R. Comparison of four different categories of prosthetic feet during ramp ambulation in unilateral transtibial amputees. Prosthet Orthot Int, 2015; 39 (5): 380–389 doi: 10.1177/0309364614536762
- Agrawal V, Gailey R, Gaunaurd I, O’Toole C, Finnieston A. Comparison between microprocessor-controlled ankle/foot and conventional prosthetic feet during stair negotiation in people with unilateral transtibial amputation. J Rehabil Res in Dev, 2013; 50 (7): 941–950. doi: 10.1682/JRRD.2012.05.0093
- Wolf S, Alimusaj M, Fradet L, Siegel J, Braatz, F. Pressure characteristics at the stump/socket interface in transtibial amputees using an adaptive prosthetic foot. Clin Biomech (Bristol, Avon), 2009; 24 (10): 860–865. doi: 10.1016/j.clinbiomech.2009.08.007
- Alimusaj M, Fradet L, Braatz F, Gerner HJ, Wolf SI. Kinematics and kinetics with an adaptive ankle foot system during stair ambulation of transtibial amputees. Gait Posture, 2009; 30 (3): 356–363. doi: 10.1016/j.gaitpost.2009.06.009
- Johnson L, De Asha AR, Munjal R, Kulkarni J, Buckley JG. Toe clearance when walking in people with unilateral amputation: Effects of passive hydraulic ankle. J Rehabil Res Dev, 2014; 51 (3): 429–438
- Rosenblatt NJ, Bauer A, Rotter D, Grabiner MD. Active dorsiflexing prostheses may reduce trip-related fall risk in people with 35 transtibial amputation. J Rehabil Res Dev, 2014; 51 (8): 1229–1242
- Fradet L, Alimusaj M, Braatz F, Wolf SI. Biomechanical analysis of ramp ambulation of transtibial amputees with an adaptive ankle foot system. Gait Posture, 2010; 32 (2): 191– 198. doi: 10.1016/j.gaitpost.2010.04.011
- Hahn A, Ripka S, Sreckovic I, Mileusnic M. Erste Ergebnisse bezüglich Sicherheit, Gehen und Zufriedenheit mit einem innovativen mikroprozessorgesteuerten 4‑achsigen prothetischen Fußpassteil. OTWorld 2016, Vortrag Wissenschaft/ Handwerk [5823], Abstract [1790], Thema: Prothetik
- Hahn A, Ripka S, Sreckovic I, Mileusnic M. Erste Ergebnisse bezüglich Sicherheit, Gehen und Zufriedenheit mit einem innovativen mikroprozessorgesteuerten 4‑achsigen prothetischen Fußpassteil. OTWorld 2016, Vortrag Wissenschaft/ Handwerk [5823], Abstract [1790], Thema: Prothetik
- De Asha A, Munjal R, Kulkarni J, Buckley J. Walking speed related joint kinetic alterations in trans-tibial amputees: impact of hydraulic ‘ankle’ damping. J Neuroeng Rehabil, 2013; 10: 107. doi: 10.1186/1743–0003-10–107
- De Asha A, Munjal R, Kulkarni J, Buckley J. Impact on the biomechanics of overground gait of using an ‘Echelon’ hydraulic ankle-foot device in unilateral trans-tibial and transfemoral amputees. Clin Biomech (Bristol, Avon), 2014; 29 (7): 728–734. doi: 10.1016/j.clinbiomech.2014.06.009
- Agrawal V, Gailey R, Gaunaurd I, O’Toole C, Finnieston A, Tolchin R. Comparison of four different categories of prosthetic feet during ramp ambulation in unilateral transtibial amputees. Prosthet Orthot Int, 2015; 39 (5): 380–389 doi: 10.1177/0309364614536762
- Agrawal V, Gailey R, Gaunaurd I, O’Toole C, Finnieston A. Comparison between microprocessor-controlled ankle/foot and conventional prosthetic feet during stair negotiation in people with unilateral transtibial amputation. J Rehabil Res in Dev, 2013; 50 (7): 941–950. doi: 10.1682/JRRD.2012.05.0093
- Alimusaj M, Fradet L, Braatz F, Gerner HJ, Wolf SI. Kinematics and kinetics with an adaptive ankle foot system during stair ambulation of transtibial amputees. Gait Posture, 2009; 30 (3): 356–363. doi: 10.1016/j.gaitpost.2009.06.009
- Hahn A, Ripka S, Sreckovic I, Mileusnic M. Erste Ergebnisse bezüglich Sicherheit, Gehen und Zufriedenheit mit einem innovativen mikroprozessorgesteuerten 4‑achsigen prothetischen Fußpassteil. OTWorld 2016, Vortrag Wissenschaft/ Handwerk [5823], Abstract [1790], Thema: Prothetik
