Einleitung
Unsere Hände sind die besten und feinsten Werkzeuge, die uns Menschen gegeben sind. Mit ihnen können wir Gegenstände nicht nur greifen und manipulieren, sondern auch ertasten und erfühlen und damit deutlich besser „begreifen“. Wenn ein Mensch eine Hand verliert, ist das ein großer Verlust, der zu weitreichenden Einschränkungen für den Betroffenen führen kann.
Nach einer Amputation versucht man in der Regel, die verlorene Hand durch eine Prothese zu ersetzen. Meistens werden dazu Myoprothesen verwendet, die elektrisch betrieben und über elektromyographische (EMG) Signale des Nutzers gesteuert werden 1. Jede solche Handprothese kann ganz geöffnet und geschlossen werden, sodass Objekte gegriffen werden können. Manche Prothesen verfügen über weitere ansteuerbare Freiheitsgrade wie etwa weitere Grifftypen, individuell steuerbare Finger oder eine Handgelenksrotation. Während intensiv an der gleichzeitigen und intuitiven EMG-Steuerung mehrerer Freiheitsgrade über Mustererkennungsalgorithmen und Regression geforscht wird 23, verwenden fast alle momentan auf dem Markt vorhandenen Handprothesen folgende einfache Zweikanalsteuerung: Je eine Elektrode wird auf den Handgelenksbeugern und ‑streckern fixiert. Während die Aktivierung der einen Elektrode etwa zum Schließen der Prothese führt, kann die Prothese über die Aktivierung der anderen wieder geöffnet werden. Die Steuerung ist dabei proportional, d. h., ein schwaches/starkes Flexorsignal wird z. B. in eine langsame/schnelle Schließbewegung überführt, die in einer kleinen/ großen Griffkraft resultiert. Der Freiheitsgrad kann beispielsweise über eine sogenannte Ko-Kontraktion gewechselt werden, bei der beide Muskelgruppen gleichzeitig kurz und stark aktiviert werden. Im neuen Freiheitsgrad können dann wieder beide Richtungen über die zwei Elektroden gesteuert werden. Obwohl die Prothesensteuerung auf diese Weise zuverlässig funktioniert, verwenden die meisten Prothesenträger ihre Prothese nur zur Unterstützung der gesunden Hand.
Neben den wenigen Freiheitsgraden und der nicht ganz intuitiven Steuerung spielt dafür das nicht vorhandene somatosensorische Feedback eine Rolle: Die Prothese vermittelt dem Nutzer kein Gefühl. Wenn wir mit unserer gesunden Hand greifen, dann spüren wir, wann wir das Objekt berühren und wie es sich anfühlt. Bei zerbrechlichen Objekten spüren wir in der Regel auch, wie viel Kraft wir aufwenden sollten, um das Objekt sicher zu halten und dennoch nicht zu zerbrechen. Neben diesem Berührungsfeedback bekommen wir auch propriozeptive Informationen von unserer Hand: Wir können spüren, in welcher Position sich unsere Hand und jeder Finger befindet, also etwa, ob sie offen oder geschlossen ist. Beide Feedbackarten sind sehr wichtig, denn Studien haben gezeigt, dass eine Betäubung der sensorischen Handnerven zu einer ungenaueren Kraftkontrolle führt 4. Außerdem führt die Abwesenheit somatosensorischen Feedbacks zu sensomotorischer Inkongruenz und damit potenziell zu Phantomschmerz, weil ein ausgeführter Bewegungsbefehl nicht zu dem erwarteten Feedback führt 5. In einer ähnlich „betäubten“ Situation befindet sich ein Prothesenträger beim Greifen: Er kontrahiert seine Stumpfmuskeln, damit sich die Prothese bewegt. Um die Prothesengeschwindigkeit zu kontrollieren, kann er sich grob auf die Propriozeption seiner Muskeln verlassen; das EMG-Signal kann allerdings gerade bei starker Kontraktion sehr schwanken und ist deshalb nicht sehr genau kontrollierbar 6. Danach kann der Prothesenträger nur über seine anderen Sinne verfolgen, ob die Prothese das intendierte Objekt greift. Dieses sogenannte implizite Feedback kann hilfreich sein, wenn visuell grob abgeschätzt werden soll, in welchem Öffnungs- und Rotationswinkel sich die Prothese befindet und wie schnell sie sich schließt. Letzteres kann bei einigen Prothesen auch akustisch über das Motorgeräusch abgeschätzt werden.
Seit einigen Jahren wird versucht, das verlorengegangene somatosensorische Feedback der Hand über nichtinvasives künstliches taktiles Feedback wiederherzustellen 78. Dabei werden Sensoren in die Prothese eingebaut, die messen, wie stark sie zugreift, in welchem Freiheitsgrad sie sich befindet, wie weit sie geöffnet ist etc. Theoretisch kann man die gemessenen Prothesenparameter über denselben Sinneskanal etwas weiter proximal zurückgeben, d. h., etwa einen Druck wieder durch taktilen, mechanischen Druck darstellen. Solche Ansätze wurden in einigen Studien sowohl für Berührungs- und Griffkraftfeedback 910 als auch für die Rückgabe der Armposition untersucht 11. Weiter verbreitet ist die sogenannte sensorische Substitution 12, bei der ein „Sinnesreiz” der Prothese von einer bestimmten „Sinnesmodalität“ in eine andere umgewandelt wird. Die meistgenutzten Ersatzmodalitäten sind die elektrotaktile 13 und die vibrotaktile Stimulation 14 des Stumpfes. Beide haben Vor- und Nachteile. Während die Elektrostimulation durch ihre Lautlosigkeit, ihre kleine Größe und einen geringen Energieverbrauch besticht, muss sie für jeden Probanden fein justiert werden und kann von manchen Probanden oder bei schlechter Positionierung als unangenehm empfunden werden. Die vibrotaktile Stimulation hingegen, die den meisten auch von Handys bekannt ist, kann bei fast allen Probanden problemlos angewandt werden, ist aber relativ laut und nicht so leicht in den Prothesenschaft einzubetten. Beide Stimulationstypen können auf mehrere Arten kodiert werden. Dies kann am Beispiel des Kraftfeedbacks folgendermaßen verdeutlicht werden: Wird eine Kraft zwischen null und hundert Prozent gemessen, so kann sie proportional über Amplitudenkodierung an einen einzigen Taktor zurückgegeben werden. Eine Griffkraft von 30 % würde dann bei konstanter Frequenz mit einer Stimulationsamplitude von 30 % kodiert. Stattdessen wird in der Frequenzkodierung die Stimulationsamplitude konstant gehalten und die Stimulationsfrequenz proportional zur zurückgegebenen Prothesenvariablen gewählt. Sowohl die Amplituden- als auch die Frequenzkodierung haben den Vorteil, dass ein stärkeres Prothesensignal durch eine stärkere Empfindung zurückgegeben wird, was intuitiv zu verstehen ist. Der Nachteil besteht darin, dass die menschliche Haut am Unter- oder Oberarm relativ schlecht zwischen verschiedenen vibro- oder elektrotaktilen Signalstärken unterscheiden kann, sodass in der Regel nur wenige Niveaus pro Taktor für den Anwender klar erkennbar sind 15. Eine klarere Differenzierung kann durch örtliche Kodierung erreicht werden, bei der je nach Stärke des Prothesensignals andere Taktoren angeschaltet werden 16. Die örtliche Kodierung kann mit Frequenz- oder Amplitudenkodierung zu gemischter Kodierung kombiniert werden 1718. Seit wenigen Jahren ist die erste kommerzielle Prothese mit taktilem Berührungsfeedback namens „Vincent Evolution 2“ (Vincent Systems GmbH, Karlsruhe 19 auf dem Markt).
In den vergangenen Jahren haben einige Studien den Effekt künstlichen somatosensorischen Feedbacks auf die Prothesensteuerung untersucht. In mehreren Studien wurde in einfachen Labortests gezeigt, dass das künstliche Feedback hilft, wenn man die Prothese nicht sehen kann 2021. Damit wird jedoch die Rolle des oben beschriebenen impliziten Feedbacks ignoriert. Es wird also nicht berücksichtigt, dass man seine eigene Muskelkraft einschätzen und die Prothese sehen und hören kann. Nur sehr wenige Studien haben die Leistungssteigerung mit und ohne künstliches Feedback unter realitätsnahen Bedingungen untersucht. Eine dieser Studien konnte eine erhöhte Griffgenauigkeit durch Griffkraftfeedback in zwei von sechs Bedingungen zeigen 22, während eine andere eine verbesserte Leistung in einem sehr feinen Griffkrafttest (dem Virtual-Egg-Test) nachweisen konnte, wenn ein bestimmtes Griffphasenfeedback gegeben wurde 23.
In der im Folgenden beschriebenen Pilotstudie wird ein neues Feedbacksystem vorgestellt, das nicht nur die Griffkraft, sondern auch die aktivierte Funktion zurückgibt. Das Feedbacksystem wurde an einem transhumeral amputierten Probanden getestet. Seine Leistungen mit und ohne künstliches Feedback wurden mit zwei realitätsnahen Tests eruiert, von denen einer sehr leicht (ein Freiheitsgrad, keine Kraftkontrolle benötigt) und einer recht komplex (zwei Freiheitsgrade, gute Kraftkontrolle benötigt) war. Basierend auf vorangegangenen Studien wird folgende Hypothese getestet: Während der leichte Test so einfach ist, dass die eigene Propriozeption und das implizite Feedback ausreichen, kann der Proband in dem komplexen Test stark vom künstlichen Feedback profitieren.
Methoden der Pilotstudie
Vorstellung des Feedbacksystems
Prothese und Steuerung
Zu Beginn der Studie wurde der Proband im Competence Center Headquarters der Otto Bock Healthcare GmbH (Duderstadt) mit einer Armprothese mit myoelektrisch fixierbarem Ellbogengelenk und einer myoelektrisch gesteuerten Hand (Michelangelo-Hand, Otto Bock Healthcare GmbH, Duderstadt) versorgt, die folgendermaßen gesteuert wurde: Über zwei eingebaute Oberflächen-EMG-Sensoren (Otto Bock Healthcare Products GmbH) wurde das vorverarbeitete myoelektische Hüllkurvensignal vom Bizeps- und Trizepsmuskel abgenommen. Über eine Ko-Kontraktion beider Muskeln konnte der Ellbogen ge- und entsperrt werden. Die Michelangelo-Hand war mit drei Funktionen ausgestattet: mit aktiver Rotation sowie mit dem Oppositionsmodus und dem Lateralmodus. Der Proband konnte über einen kurzen, schnellen Bizepsimpuls zwischen Rotation und Greifen wechseln, während ein entsprechender Trizepsimpuls einen Wechsel zwischen den Grifftypen initiierte. Innerhalb einer Funktion führte eine etwas langsamere Bizeps-Kontraktion zu proportional gesteuertem Schließen bzw. Innenrotieren der Prothesenhand. Genauso wurde über eine entsprechende Trizeps-Kontraktion das Öffnen/Außenrotieren der Prothesenhand erreicht.
Feedbacksystem
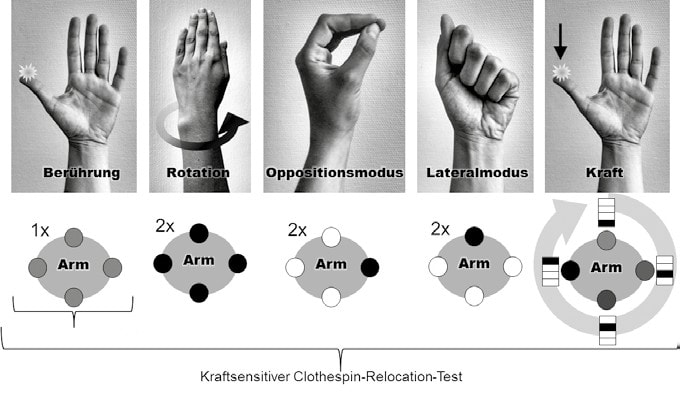
Das getestete Feedbacksystem bestand aus acht Vibrotaktoren (C3-Taktoren; Engineering Acoustics, Inc., Casselbary, USA). Diese waren in einem Armband fixiert, sodass sie gleichmäßig um den linken Unterarm des Probanden verteilt waren. Die Vibrationsfrequenz wurde auf 130 Hz festgelegt. Da je zwei benachbarte Taktoren stets gemeinsam aktiviert wurden, um eine stärkere Empfindung zu erzeugen, wird im Folgenden nur über vier Stimulationspunkte gesprochen. Über die folgenden Pulse wurden Funktionswechsel sowie Berührung und Griffkraft zurückgegeben (Abb. 1). Bei einem Wechsel in die Rotation wurden alle vier Stimulationspunkte mit voller Intensität zweimal kurz aktiviert (je 100 ms, 100 ms Pause dazwischen). Ein Wechsel in den Oppositions- bzw. Lateralmodus wurde über volle Aktivierung des inneren bzw. oberen Stimulationspunktes auf gleiche Weise angezeigt. Durch dieses Funktionsfeedback war der Proband über jeglichen gewollten oder ungewollten Funktionswechsel zuverlässig informiert. Eine erste Berührung der Prothese, die über den zwischen Daumen und Zeigefinger eingebauten Kraftsensor der Michelangelo-Hand detektiert wurde, wurde über eine etwas längere (250 ms) und schwächere (halbe Intensität) Aktivierung aller Stimulationspunkte zurückgegeben. Neben diesen diskreten Ereignissen wurde auch die Griffkraft vermittelt, sobald sie 10 % überstiegen hatte. Sie wurde über vier örtlich kodierte Level und über ansteigende Intensität kontinuierlich zurückgegeben, bis das Muskelsignal wieder auf null gefallen war. Somit wurde, wie in Abbildung 1 dargestellt, eine kleine/sehr große Kraft etwa durch den oberen/äußeren Stimulationspunkt bei mittlerer/höchster Intensität zurückgegeben. Dadurch konnte der Proband fünf Kraftlevel (nur Berührung plus die vier eigentlichen Level) sicher voneinander unterscheiden.
Experimentelle Evaluierung des Feedbacksystems
Proband
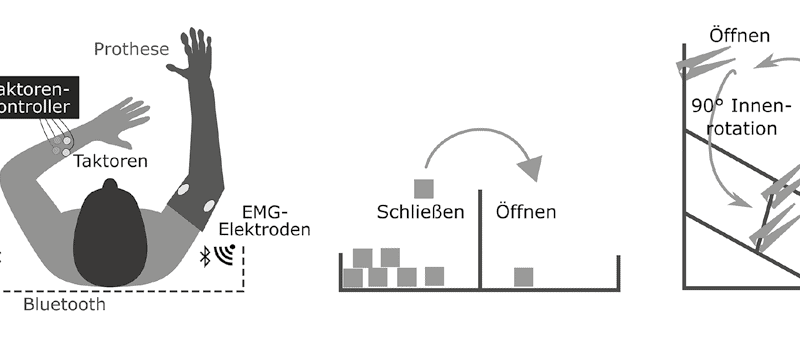
Das entwickelte Feedbacksystem wurde an einem 25-jährigen Anwender getestet, der auf der ursprünglich dominanten rechten Seite transhumeral amputiert war (Abb. 2a). Der Proband wurde schriftlich und mündlich über die von der örtlichen Ethikkommission genehmigte Studie aufgeklärt und hat der Teilnahme zugestimmt.
Experimentelles Design
Die hier beschriebenen Experimente fanden parallel zum klassischen Prothesentraining im Competence Center Headquarters der Otto Bock Healthcare GmbH statt. In insgesamt sieben experimentellen Sitzungen testeten die Verfasser den Erfolg in den beiden im Folgenden beschriebenen Tests. Dabei interessierte insbesondere, ob der Proband ein besseres Ergebnis erzeugte, wenn er über das oben beschriebene Feedback vibrotaktil mit Informationen versorgt wurde.
Im sogenannten Box-and-Block-Test (BBT) 24 soll der Anwender innerhalb einer Minute möglichst viele Holzblöcke einzeln aus dem linken Bereich einer Box über eine Abtrennung auf die rechte Seite der Box befördern (Abb. 2b). Dieser Test eignet sich also dazu, die grobe Steuerung innerhalb des Oppositionsmodus zu testen; weitere Prothesenzustände oder bestimmte Kraftbereiche werden nicht benötigt. Deshalb erhielt der Proband nur das Berührungsfeedback, aber keine Zusatzinformation über (unintendierte) Funktionswechsel oder die erzeugte Griffkraft.
Im sogenannten kraftsensitiven Clothespin-Relocation-Test (CPRT, abgeändert von 25, Abb. 2c) sollte der Proband erst im Oppositionsmodus eine auf einer waagerechten Stange festgeklemmte Wäscheklammer greifen, dann die Hand um etwa 90° außenrotieren und schließlich die Klammer auf einer senkrechten Stange durch Öffnung der Prothesenhand anstecken. Nach folgender Innenrotation von etwa 90° konnte der Vorgang mit der nächsten Wäscheklammer wiederholt werden. Insgesamt wurde die benötigte Zeit gemessen, um vier Wäscheklammern mit aufsteigendem Widerstand (von leicht bis schwer) umzusetzen. Damit der Proband nicht bei jeder Klammer mit maximaler Kraft zugreifen konnte, waren die Wäscheklammern mit Lichtsensoren ausgestattet, die bei zu weiter Öffnung der Wäscheklammer aktiviert wurden. Dadurch simulierten die vier Wäscheklammern vier zerbrechliche Objekte, die je mit einer hinreichend großen und ausreichend kleinen Kraft gegriffen werden mussten. Wurde eine Wäscheklammer fallengelassen oder „zerbrochen“, so wurde die Zeit angehalten und die Klammer zurückgesteckt. Der Proband konnte dann mit derselben Klammer fortfahren. In diesem komplexen CPRT erhielt der Proband das gesamte Feedback, was mit dem oben beschriebenen Feedbacksystem möglich ist. Dadurch konnte er spüren, ob er in die richtige Prothesenfunktion wechselte und ob er sich etwa im richtigen Kraftbereich befand.
Über die Sitzungen wurden insgesamt 15 BBTs und 8 CPRTs sowohl mit als auch ohne Feedback durchgeführt. Die Reihenfolge zwischen den beiden Feedbackbedingungen war in jeder Sitzung randomisiert.
Als Leistungsmessung wurden im BBT die transferierte Anzahl an Blöcken, im CPRT die benötigte Zeit und die Anzahl der gemachten Fehler analysiert. Außerdem wurde der Median der erzeugten Griffkräfte (über 5 % Griffkraft für mindestens 500 ms in BBT und 1000 ms in CPRT; je ein Mittelwert der Maxima pro Testdurchlauf) zwischen den beiden Feedbackbedingungen verglichen.
Ergebnisse der Pilotstudie
In Abbildung 3 sind die Ergebnisse des Probanden im Box-and-Block-Test (Abb. 3a) und im Clothespin-Relocation-Test (Abb. 3b) dargestellt. Im BBT konnte er ohne Feedback 14 ± 4 (Median ± Standardabweichung) Blöcke transferieren; mit Feedback waren es 16 ± 6 Blöcke. In den beiden Bedingungen griff er im Median mit 70 % (ohne Feedback) und 76 % (mit Feedback) Kraft, obwohl ein sicheres Greifen schon bei 5 % gegeben ist. Wie aus diesem Abschnitt und in der Abbildung zu sehen, war der Proband nicht durchweg besser mit Feedback, sondern konnte nicht davon profitieren.
Im CPRT hingegen benötigte er 120 ± 16 s, wenn er kein Feedback erhielt. Diese Zeit konnte er fast halbieren (62 ± 7 s), wenn er das oben beschriebene Feedbacksystem nutzte. Außerdem machte er dann deutlich weniger Fehler (9 ± 7 in der Bedingung ohne Feedback versus 0 ± 1 in der Feedbackbedingung). Die Griffkräfte waren im Median 8 % niedriger, wenn Feedback gegeben wurde (35 %/27 % ohne/mit Feedback).
Diskussion der Pilotstudie
Wie aus Abbildung 3 hervorgeht, konnte der getestete Proband seine Leistung im komplexen Clothespin-RelocationTest mit dem taktilen Feedback deutlich verbessern, wohingegen im einfachen Box-and-Block-Test kein Unterschied zu sehen war. Im einfachen BBT führte das gegebene Berührungsfeedback nicht zu einer Leistungssteigerung, da es keinen funktionellen Mehrwert für den Probanden hatte. Um möglichst schnell zu sein, erzeugte er vermutlich eine ziemlich starke Kontraktion und griff damit die Blöcke mit großer Kraft, sodass er auch ohne das vibrotaktile Feedback wusste, dass er zugegriffen hatte. Außerdem sollte das implizite Feedback nicht unterschätzt werden, durch das der Proband immer sehen konnte, wenn er einen Block gegriffen hatte, und hören und sehen konnte, ob er einen Block verloren hatte.
Im deutlich komplexeren abgeänderten CPRT musste der Proband nicht nur zwischen dem Oppositionsmodus sowie Innen- und Außenrotation wechseln, sondern auch Kräfte in vier verschiedenen, wenige Newton weiten Kraftbereichen erzeugen. Die deutlich schnellere Zeit ist also vermutlich einerseits darauf zurückzuführen, dass der Proband sich schneller sicher sein konnte, dass seine Ko-Kontraktion erfolgreich war und er sich in der richtigen Prothesenfunktion befand. Andererseits muss er durch das taktile Kraftfeedback deutlich besser in der Lage gewesen sein, die von ihm selbst über die Muskelkontraktion gesteuerte Prothesenkraft einzuschätzen und damit die richtigen Kraftbereiche für jede Wäscheklammer zu erreichen. Dies ist nicht nur anhand der langsameren Zeit, sondern auch anhand der deutlich höheren Anzahl an Fehlern und der etwas höheren Kräfte in der Bedingung ohne Feedback zu sehen.
Die Komplexität des gegebenen Feedbacks wurde wie oben beschrieben an die Komplexität der Tests angepasst, sodass sich die beiden Tests nicht nur in der Aufgabe, sondern auch im Feedback unterschieden. Für den BBT ist eine genaue Kenntnis der Griffkräfte aus Sicht der Verfasser nicht interessant, weil der Nutzer die Geschwindigkeit, nicht die Griffeffizienz optimieren soll, sodass deutlich höhere Kräfte als nötig produziert werden sollten. Diese Vermutung konnte durch die Daten bestätigt werden (siehe Ergebnisteil). Im BBT nicht benötigtes Kraft- oder Funktionsfeedback hätte dem Nutzer also weder geholfen noch geschadet, da es keine weitere aufgabenrelevante Information enthalten hätte 26. Im CPRT hingegen wurde das gesamte Feedbacksystem genutzt, da sowohl die Kenntnis der Griffkraft als auch der Funktionswechsel für den Test relevant waren.
Fazit
Zusammengefasst unterstützen die vorgestellten Pilotdaten die Hypothese, dass zusätzliches, vibrotaktiles Feedback dann zu einer funktionellen Verbesserung in einem Anwendungsszenario führen kann, wenn dieses hinreichend komplex ist und das Feedback wichtige, sonst nicht vorhandene Informationen des Anwendungsszenarios wahrnehmbar macht. Nach der Studie gab der Proband zudem an, dass er sich sehr gut vorstellen könne, auch zu Hause von dem zusätzlich gegebenen Feedback zu profitieren. Während er sowohl die Nützlichkeit des Funktionsfeedbacks (10/10) als auch die des Kraftfeedbacks (10/10) als maximal einstufte, hielt er das Berührungsfeedback (5.5/10) für nicht ganz so notwendig. Insgesamt folgt daraus, dass er auch subjektiv von dem Feedback profitierte. Natürlich müssen weitere Probanden untersucht werden, um auch für andere Probanden gültige Erkenntnisse aus den Daten zu ziehen.
Für die Autoren:
Dr. Meike A. Schweisfurth
Institute for Neurorehabilitation Systems
Universitätsmedizin Göttingen
Von-Siebold-Str. 3
37075 Göttingen
meike.schweisfurth@bccn.uni-goettingen.de
Begutachteter Beitrag/reviewed paper
Schweisfurth MA, Markovic M, Bentz T, Wüstefeld D, Farina D, Dosen S. Sensorisches Feedback in der Handprothetik. Orthopädie Technik, 2017; 68 (7): 34–38

- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Vujaklija I, Farina D, Aszmann O. New developments in prosthetic arm systems. Orthop Res Rev, 2016; 8: 31–39
- Amsuess S, Vujaklija I, Gobel P, Roche A, Graimann B, Aszmann O, Farina D. Context-Dependent Upper Limb Prosthesis Control for Natural and Robust Use. IEEE Trans Neural Syst Rehabil Eng, 2015; 4320 ©: 1
- Hahne JM, Biessmann F, Jiang N, Rehbaum H, Meinecke FC, Müller KR, Farina D, Parra LC. Linear and non-linear regression techniques for simultaneous and proportional myoelectric control. Neural Syst Rehabil Eng (IEEE) Trans, 2014; 22 (2): 269–279
- Brochier T, Boudreau M‑J, Paré M, Smith AM. The effects of muscimol inactivation of small regions of motor and somatosensory cortex on independent finger movements and force control in the precision grip. Exp Brain Res, 1999; 128 (1): 31–40
- Harris AJ. Cortical origin of pathological pain. Lancet, 1999; 354 (9188): 1464–1466
- Parker P, Englehart K, Hudgins B. Myoelectric signal processing for control of powered limb prostheses. Spec Sect (pp. 541– 610) 2006 ISEK Congr, 2006; 16 (6): 541–548
- Antfolk C, D’Alonzo M, Rosén B, Lundborg G, Sebelius F, Cipriani C. Sensory feedback in upper limb prosthetics. Expert Rev Med Devices, 2013; 10 (1): 45–54
- Childress DS. Closed-loop control in prosthetic systems: Historical perspective. Ann Biomed Eng, 1980; 8 (4): 293–303
- Antfolk C, D’Alonzo M, Controzzi M, Lundborg G, Rosen B, Sebelius F, Cipriani C. Artificial redirection of sensation from prosthetic fingers to the phantom hand map on transradial amputees: Vibrotactile versus mechanotactile sensory feedback. IEEE Trans Neural Syst Rehabil Eng, 2013; 21 (1): 112–120
- Antfolk C, Björkman A, Frank S, Sebelius F, Lundborg G, Rosen B. Sensory feedback from a prosthetic hand based on airmediated pressure from the hand to the forearm skin. J Rehabil Med, 2012; 44 (8): 702–707
- Proske U, Gandevia SC. The Proprioceptive Senses: Their Roles in Signaling Body Shape, Body Position and Movement, and Muscle Force. Physiol Rev, 2012; 92 (4): 1651–1697
- Childress DS. Closed-loop control in prosthetic systems: Historical perspective. Ann Biomed Eng, 1980; 8 (4): 293–303
- Szeto AY, Saunders FA. Electrocutaneous stimulation for sensory communication in rehabilitation engineering. IEEE Trans Biomed Eng, 1982; 29 (4): 300–308
- Conzelman Jr JE, Ellis HB, O’Brien CW. Prosthetic device sensory attachment. US-Patent US2656545 A, 1953. https:// www.google.com/patents/US2656545 (Zugriff am 06.06.2017)
- Kaczmarek KA, Webster JG, Bach-y-Rita P, Tompkins WJ. Electrotactile and vibrotactile displays for sensory substitution systems. Biomed Eng IEEE Trans, 1991; 38 (1): 1–16
- Witteveen HJB, Droog EA, Rietman JS, Veltink PH. Vibroand Electrotactile User Feedback on Hand Opening for Myoelectric Forearm Prostheses. IEEE Trans Biomed Eng, 2012; 59 (8): 2219–2226
- Dosen S, Markovic M, Strbac M, Perovic M, Kojic V, Bijelic G, Keller T, Farina, D. Multichannel Electrotactile Feedback with Spatial and Mixed Coding for Closed-Loop Control of Grasping Force in Hand Prostheses. IEEE Trans Neural Syst Rehabil Eng, 2017; 25 (3): 1–12
- Schweisfurth MA, Markovic M, Dosen S, Teich F, Graimann B, Farina D. Electrotactile EMG feedback improves the control of prosthesis grasping force. J Neural Eng, 2016; 13 (5): 1–16
- Vincent Systems GmbH. Vincent Evolution 2. h ttp:// vincentsystems.de/prothetik/vincent-evolution‑2/ (Zugriff am 06.06.2017)
- Ninu A, Dosen S, Muceli S, Rattay F, Dietl H, Farina D. Closed-loop control of grasping with a myoelectric hand prosthesis: Which are the relevant feedback variables for force control? IEEE Trans Neural Syst Rehabil Eng, 2014; 22 (5): 1041–1052
- Witteveen HJB, de Rond L, Rietman JS, Veltink PH. Handopening feedback for myoelectric forearm prostheses: performance in virtual grasping tasks influenced by different levels of distraction. J Rehabil Res Dev, 2012; 49 (10): 1517–1526
- Rosenbaum-Chou T, Daly W, Austin R, Chaubey P, Boone DA. Development and Real World Use of a Vibratory Haptic Feedback System for Upper-Limb Prosthetic Users. J Prosthet Orthot, 2016; 28 (4): 136–144
- Clemente F, D’Alonzo M, Controzzi M, Edin B, Cipriani C. Non-invasive, temporally discrete feedback of object contact and release improves grasp control of closed-loop myoelectric transradial prostheses. IEEE Trans Neural Syst Rehabil Eng, 2016; 24 (12): 1314–1322
- Mathiowetz V, Volland G, Kashman N, Weber K. Adult Norms for the Box and Block Test of Manual Dexterity. Am J Occup Ther, 1985; 39 (6): 386–391
- Lipschutz RD, Kuiken TA, Miller LA, Dumanian GA, Stubblefield KA. Shoulder disarticulation externally powered prosthetic fitting following targeted muscle reinnervation for improved myoelectric control. J Prosthet Orthot, 2006; 18 (2): 28–34
- Koerding KP, Wolpert DM. Bayesian integration in sensorimotor learning. Nature, 2004; 427 (6971): 244–247
