Einleitung
Die Möglichkeit, sich selbstständig zu bewegen, ist Grundlage der Handlungsfähigkeit des Menschen. Bewegungsstörungen und funktionelle Bewegungseinschränkungen erzeugen Schmerzen, behindern und erschweren häufig die Ausführung selbst alltäglicher Tätigkeiten. Deshalb ist es dringend geboten, durch gezielte Maßnahmen die Bewegungsfähigkeit zu erhalten oder wiederherzustellen. Insbesondere der Verlust an Lebensqualität, aber auch die mit Bewegungseinschränkungen verbundenen Kosten im Gesundheitswesen erfordern innovative Ansätze zur Erhaltung bzw. Wiederherstellung des Bewegungsvermögens 1 . Hierbei müssen neben neuen operativen Möglichkeiten zunehmend auch konservative Ansätze Anwendung finden, zu denen in besonderem Maße physiotherapeutische Methoden gehören.

Die betroffenen Patienten bedürfen einer adäquaten physiotherapeutischen Therapie, die sich den aktuellen individuellen Bedürfnissen und Defiziten jedes einzelnen Patienten in Form und Umfang anpasst. Für eine erfolgreiche Wiederherstellung der Bewegungsfähigkeit müssen darüber hinaus die einzelnen Übungen korrekt, regelmäßig und in geeigneter Weise durchgeführt werden 2 3. In der praktischen Umsetzung beobachtet und kontrolliert der Physiotherapeut den individuellen Rehabilitationsprozess und leitet den Patienten bei dessen Übungsdurchführung an. Die Verantwortung für Anleitung und Kontrolle der durchzuführenden Übungen liegt somit beim Therapeuten. Angesichts der wachsenden Zahl älterer Menschen, die zunehmend unter funktionellen Bewegungseinschränkungen leiden, gewinnt daher die Forderung nach effektiven physiotherapeutischen Übungsformen, die autonom vom Patienten in seinem häuslichen Umfeld durchgeführt werden können, zunehmend an Bedeutung 4 5. Insbesondere für Patienten mit muskuloskelettalen Erkrankungen wird dieser Aspekt umso wichtiger, je mehr sich die Liegezeiten der Patienten verkürzen und damit die postoperative Rehabilitation zunehmend in die ambulante Versorgung verlagert wird.
Das Problem eines autonom durch den Patienten durchgeführten Trainings ist allerdings, dass die Kontrolle der Übungsdurchführung vom Therapeuten auf den Patienten übergeht. Da zusätzlich die Komponente der Anleitung und unmittelbaren Begleitung durch den Therapeuten fehlt, ist der Patient bei seiner Übungsdurchführung häufig verunsichert, was Auswirkungen auf Qualität und Regelmäßigkeit der Übungsdurchführung hat. Darüber hinaus fehlen dem Therapeuten wichtige Informationen über die vom Patienten autonom ausgeführten Übungen, so dass eine individuelle Adaption des Übungsplans an den Therapieverlauf nur schwer möglich ist. Technische Assistenzsysteme, die in die Therapie des Patienten integriert werden und dem Patienten sowohl Anleitung als auch Kontrolle bieten, stellen hierbei einen effektiven Ansatz dar, die Problematik eines autonomen Trainings zu reduzieren.
Technische Assistenzsysteme in der Rehabilitation
Entsprechend der Forderung, dem Patienten die Möglichkeit zu geben, sein physiotherapeutisches Training selbstständig und autonom durchzuführen, sind in den letzten Jahren verstärkt technische Assistenzsysteme entwickelt worden, die jedoch hauptsächlich in der neurologischen Rehabilitation Anwendung finden. Die meisten dieser Assistenzsysteme ersetzen nicht den direkten Kontakt zwischen Therapeut und Patient, sondern ermöglichen ein zusätzliches autonomes Training, wobei sich alleine durch die Erhöhung der Anzahl der Übungseinheiten ein verbesserter Therapieerfolg einstellt 6. Grundsätzlich unterteilen sich die verfügbaren Systeme in Verfahren, bei denen die Bewegungen mechanisch gestützt oder geführt werden, und solche Verfahren, die lediglich die Bewegung überwachen und so eine Kontrolle ermöglichen.
Zu den Verfahren, bei denen die Bewegungen mechanisch gestützt oder geführt werden, gehören neben einfachen Kraftmaschinen zunehmend aktive Systeme, die auf robotischen Ansätzen beruhen. Hierbei unterscheidet man zwischen exoskelet- und endeffektorbasierten Ansätzen 7 8. Beim Exoskelett führt und/oder kontrolliert der Roboter die Position und Orientierung jedes einzelnen Segmentes der Gelenkkette 9. Im Gegensatz dazu zeichnen sich endeffektorbasierte Ansätze dadurch aus, dass lediglich das distale Ende der Gelenkkette vom Roboter geführt wird, während der Patient selbstständig die Bewegung in den proximalen Gelenken der Gelenkkette kontrolliert (Abb. 1) 10 11. Da bei endeffektorbasierten Ansätzen dem Patienten die Kontrolle über die Bewegung der Gelenkkette der Extremität überlassen ist, wird zusätzliche Sensorik eingesetzt, um die ausgeführte Bewegung zu kontrollieren 12.
Robotisch assistierte Rehabilitationssysteme sind besonders dann geeignet, wenn im Rahmen der Therapie Alltagsbewegungen häufig repetitiv wiederholt werden müssen. Sie finden daher hauptsächlich in der neurologischen Rehabilitation Anwendung. Jedoch sind robotische Rehabilitationssysteme technisch aufwendig, relativ teuer und wegen ihrer Komplexität in der Regel allenfalls stationär in einer Rehabilitationseinrichtung vorhanden, wodurch sie nur für bestimmte, ausgewählte Patientengruppen zugänglich sind. Eine breite Versorgung von Patienten kann durch technisch einfachere Lösungswege erreicht werden. Hierbei wird sich häufig virtueller Welten (VR) bedient, bei denen die auszuführenden und die tatsächlich ausgeführten Bewegungen dem Patienten auf einem Bildschirm visualisiert werden. Die prominentesten Beispiele hierfür, die einer breiten Patientenmenge zugänglich sind, basieren auf den Computerspielkonsolen Wii von Nintendo oder Kinect von Microsoft.
Diese Systeme bieten dem Patienten neben der Vorgabe der Bewegung meist zusätzlich ein Feedback über die ausgeführte Bewegung mit dem Ziel, ihn bei seinen Übungen zu motivieren, und zielen damit zumeist auf eine Intensivierung der Übungen ab 13 14. Allerdings ist die Erfassung der ausgeführten Bewegung ungenau und stellt nicht sicher, dass die einzelnen Übungen korrekt durchgeführt werden. Zudem ist die Vorgabe individueller, patientenbezogener Bewegungen als Bewegungsmuster auf diese Weise nur schwer möglich. Quantitative Daten über die ausgeführten Bewegungen, die eine Anpassung der Therapie an die individuellen Bedürfnisse jedes einzelnen Patienten zulassen, werden in der Regel nicht erhoben. Der Nutzen solcher Spielkonsolen in der Rehabilitation von Patienten mit Bewegungseinschränkungen ist daher umstritten. Wie auch die robotisch assistierte Rehabilitation finden solche VR-basierten Assistenzsysteme derzeit hauptsächlich in der neurologischen Rehabilitation Anwendung.
Selbst- oder eigenmotiviertes physiotherapeutisches Üben wird von Patienten mit muskuloskelettalen Erkrankungen in der konservativen wie postoperativen Versorgung oft in Kombination mit einfachen Trainingshilfen wie Hanteln oder resistiven Elementen (Gymnastikbändern oder ‑tubes) durchgeführt. Sie sind einfach zu verwenden, kostengünstig und in der Physiotherapie für ein breites Behandlungsspektrum muskuloskelettaler Erkrankungen etabliert. Diese Trainingshilfen bieten jedoch keinerlei Anleitung und Kontrolle für Patient und Therapeut. Dabei kommt es gerade bei der Patientengruppe mit muskuloskelettalen Erkrankungen darauf an, dass die einzelnen Übungen nicht nur genügend häufig wiederholt werden, sondern dass sie auch korrekt ausgeführt werden. Nur so kann verhindert werden, dass sich schädliche Ausweichbewegungen einschleichen und nachhaltig manifestieren.
Ein Feedback-Trainingssystem für eine autonome, individualisierte Therapie
Um einer möglichst großen Zahl von Patienten mit muskuloskelettalen Erkrankungen ein effektives und autonomes physiotherapeutisches Training zu ermöglichen, ist ein technisches Assistenzsystem erforderlich, das kostengünstig ist und sich einfach ins häusliche Umfeld des Patienten integrieren lässt. Darüber hinaus muss es dem Patienten neben einer individuellen, an seine persönlichen Defizite angepassten Vorgabe von Bewegungen (Anleitung) insbesondere eine Kontrolle der ausgeführten Übung ermöglichen, die verhindert, dass sich schädliche Ausweichbewegungen im individuellen Bewegungsmuster des einzelnen Patienten manifestieren 15.
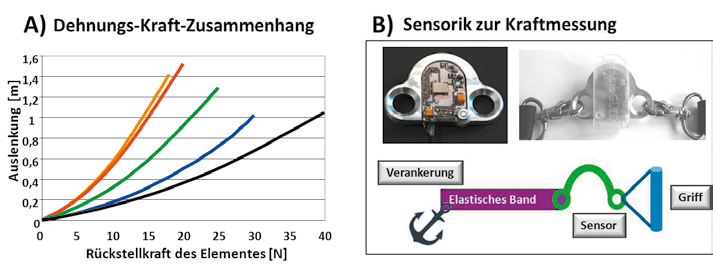
Eine ideale Grundlage für ein solches einfaches Rehabilitationssystem stellen die oben beschriebenen resistiven Elemente dar. Sie sind nicht nur in der Physiotherapie etabliert, sondern eignen sich darüber hinaus in Kombination mit einer krafterfassenden Sensorik dazu, Bewegungsumfang und Bewegungsgeschwindigkeit zu erfassen 16. Grundlage hierfür ist die Tatsache, dass sich aufgrund der elastischen Eigenschaften der resistiven Elemente die Kraft, die benötigt wird, um das Element zu dehnen, umso mehr erhöht, je weiter es ausgelenkt ist (Abb. 2a). Von der Rückstellkraft des Elementes kann daher auf den Bewegungsumfang einer physiotherapeutischen Übung zurückgeschlossen werden.
Zur Messung der Rückstellkraft wird ein U‑förmiges Biegeelement aus einer Aluminiumlegierung V330 verwendet, das zwischen dem resistiven Element und der patientenseitigen Halterung lokalisiert ist (Abb. 2b). Die Dimensionen des Biegeelementes sind so ausgelegt, dass dieses seine Form durch die während der Übung wirkenden Rückstellkräfte nicht ändert 17. Die dadurch im Biegeelement hervorgerufenen Spannungen werden durch einen Dehnmessstreifen erfasst und noch im Sensor elektronisch so verarbeitet, dass die gemessenen Kraftwerte und deren zeitliche Änderung über den USB-Anschluss eines PCs aufgezeichnet werden können.
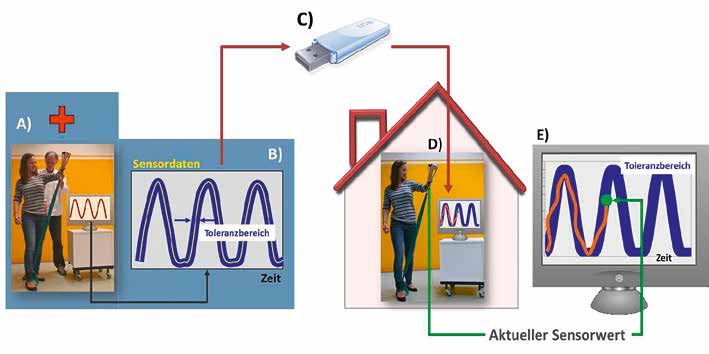
Zur Vorgabe von Bewegungen und zu deren Kontrolle eignen sich visuelle Feedbackverfahren, bei denen ein Sollwert durch das Assistenzsystem vorgegeben und der tatsächlich erreichte Wert im Vergleich zur Vorgabe dargestellt wird. Ein entscheidender Aspekt hierbei ist, dass bereits die Vorgabe an die individuellen Bedürfnisse des Patienten angepasst wird. Bei der technisch assistierten Rehabilitation muskuloskelettaler Erkrankungen basierend auf resistiven Elementen wird eine inertiale Übungsvorgabe in einer gemeinsamen Sitzung mit dem betreuenden Therapeuten generiert (Abb. 3a). Dazu leitet der Therapeut den Patienten bei dessen individuellen Übungen mit dem resistiven Element in gewohnter Weise an. Während der Übungsdurchführung zeichnet der Sensor die auftretenden Kräfte als Funktion der Zeit auf. Größere Kraftwerte entsprechen dabei einem größeren Bewegungsumfang, höhere Bewegungsgeschwindigkeiten einem stärkeren Anstieg der Sensordaten mit der Zeit (Abb. 3b). Zur Berücksichtigung des individuellen Bewegungsvermögens des einzelnen Patienten kann der Therapeut zusätzlich einen Toleranzbereich festlegen, in dem eine Übungsausführung als gut bewertet wird (Abb. 3b). Der zeitliche Verlauf der Sensordaten, die Angabe zum Toleranzbereich sowie eine Vorgabe über die Häufigkeit, mit der die Übung wiederholt werden soll, werden gespeichert und dem Patienten mit nach Hause gegeben (Abb. 3c).
Zu Hause führt der Patient autonom sein individualisiertes Training durch. Dabei wird ihm die Übungsvorgabe als Kurve mit der Breite entsprechend dem Toleranzbereich auf einem Bildschirm vorgegeben (Abb. 3d). Während der Übung wird die aktuelle Übungsausführung als Cursor dargestellt, wobei die vertikale Position dem aktuellen Sensorwert und die horizontale Position der seit Übungsstart vergangenen Zeit entspricht (Abb. 3e). Aufgabe des Patienten ist es, mit dem Cursor der vorgegebenen Bahn zu folgen. Durch das direkte Feedback ist er während der Übung jederzeit in der Lage, die Übungsvorgabe mit seiner tatsächlichen Übungsausführung zu vergleichen und gegebenenfalls direkt seine Übungsausführung zu korrigieren. Da bei der gewählten Darstellungsart des Feedbacks nicht nur der Bewegungsumfang, sondern auch dessen Änderung mit der Zeit, also die Bewegungsgeschwindigkeit, berücksichtigt wird, ist der Patient gezwungen, die mit dem Therapeuten festgelegte Bewegung möglichst genau zu wiederholen. Abweichungen vom vorgegebenen Bewegungsmuster sowie unerwünschte Ausweichbewegungen führen dazu, dass es im Vergleich zur Übungsvorgabe zu signifikanten Abweichungen in Bewegungsumfang und ‑geschwindigkeit kommt und damit der vorgegebenen Bahn nicht mehr präzise gefolgt werden kann 18.
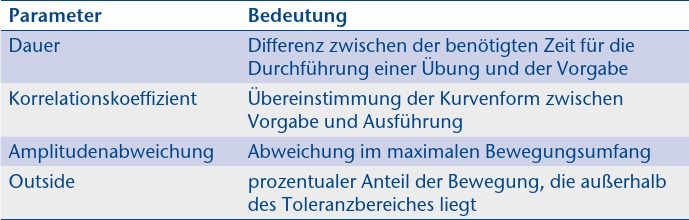
Nach Beendigung der Übung wird die Qualität der Übungsausführung bewertet. Hierfür werden insgesamt 4 mathematische Parameter herangezogen, die sich aus dem Vergleich von Vorgabe und Übungsausführung berechnen lassen (Tab. 1) 19. Die Parameterwerte werden dem Therapeuten als quantitative Größe zur Verfügung gestellt und geben einen umfassenden Überblick über die Qualität der durchgeführten Übung. Sie erlauben damit dem Therapeuten, die Bemühungen des Patienten zu evaluieren und auf der Basis quantitativer Daten den Übungsplan anzupassen 20. Der Patient erhält ebenfalls nach dem Training ein indirektes Feedback zu seiner Übungsleistung, indem die einzelnen Parameterwerte zu einem persönlichen „Patienten-Score” zusammengeführt werden.
Validierung des Feedback-Trainingssystems
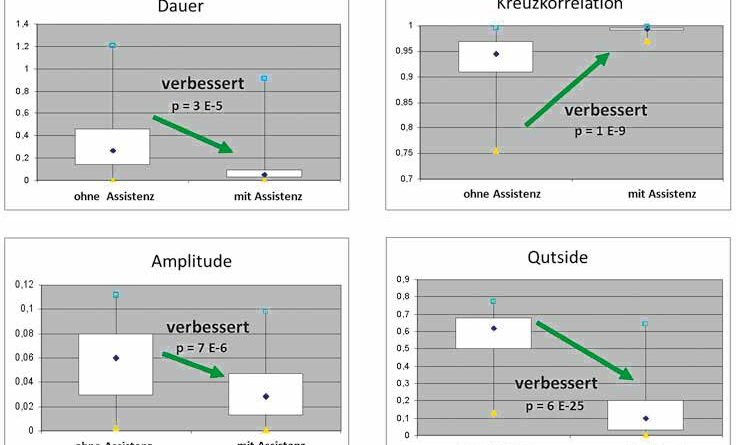
Das vorgestellte technische Assistenzsystem ermöglicht Patienten mit muskuloskelettalen Erkrankungen, in der konservativen wie postoperativen Versorgung ein durch den Therapeuten individuell angepasstes physiotherapeutisches Übungsprogramm selbstständig durchzuführen. Zudem wird durch diesen Ansatz die Dokumentation der Wiederherstellung des funktionellen Bewegungsvermögens ermöglicht. Abbildung 4 zeigt die Entwicklung der vier Parameter zur Bewertung der Qualität der Bewegungsausführung in einem Vergleich zwischen Übungen mit und ohne Feedback des Assistenzsystems. Die Daten repräsentieren verschiedene Übungen von insgesamt 46 jungen, gesunden Probanden. 16 der Probanden wiederholten die vorgegebenen Übungen ohne visuelles Feedback; 30 Probanden nutzten das Feedback zur Adaption ihrer Übungen. Zur Bestimmung der Signifikanz wurde ein doppelseitiger T‑Test durchgeführt. Alle vier Parameter zeigen eine signifikante Verbesserung der Reproduzierbarkeit der Übungsausführung unter Nutzung des Assistenzsystems 21.
Die Untersuchungen von Kohler et al. belegen, dass es grundsätzlich möglich ist, mit dem beschriebenen technischen Assistenzsystem physiotherapeutische Übungen selbstständig und mit hoher Präzision und Reproduzierbarkeit durchzuführen. Versorgt man die Patienten zusätzlich zu den üblichen rehabilitativen Maßnahmen mit solch einem technischen Assistenzsystem, so kann schon während der Rehabilitationsmaßnahme eine Steigerung der individuellen Übungseinheiten erreicht werden, ohne dass zusätzliches Personal erforderlich ist.
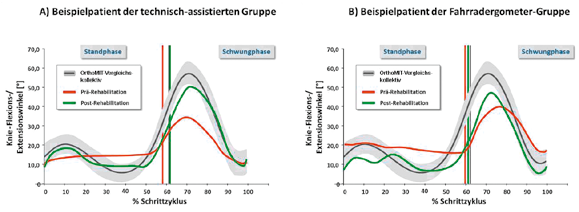
Um nachzuweisen, dass aufgrund zusätzlichen regelmäßigen Trainings bei gleichzeitiger entsprechender Anleitung und Kontrolle die Effizienz der Rehabilitationsmaßnahme verbessert werden kann, wurden in enger Kooperation der Rehabilitationsklinik Schwertbad Aachen mit der Orthopädischen Klinik der RWTH Aachen 40 Patienten nach Implantation einer Knie-TEP während der anschließenden Rehabilitation begleitet 22. 20 Patienten fuhren neben den regulären Therapieeinheiten jeweils 30 Minuten täglich Fahrradergometer, 20 Patienten übten autonom mit dem technischen Assistenzsystem ihre individuell angepassten Übungen. Zur objektiven Beurteilung der Wiederherstellung der Bewegungsfähigkeit wurden zu Beginn der Rehabilitation und 4 Wochen später Ganganalysen (per VICON MX) durchgeführt. Hierbei wurden die Bewegungen um die Kniegelenkachsen während des Gangs verglichen 23. Abbildung 5 zeigt exemplarisch für jeweils einen Patienten jeder Gruppe die Verbesserung, die in der Funktionalität der Kniegelenksbewegung während der Rehabilitation erreicht werden konnte.
Zu Beginn der Rehabilitationsmaßnahme ließen sich keine signifikanten Unterschiede in der Kniegelenksbeweglichkeit zwischen den beiden Gruppen feststellen. Nach 4 Wochen Rehabilitation stellte sich in beiden Gruppen eine signifikante Verbesserung ein. Insbesondere bei Bewegungen um die Flexions-/Extensionsachse des betroffenen Kniegelenks näherten sich die Patienten einem normalen Gangmuster an, erreichten dieses jedoch nicht vollständig (Abb. 5). Im Vergleich zum Ergometertraining konnte durch das individualisierte, angeleitete Training mit Hilfe des Assistenzsystems eine signifikante Verbesserung des Rehabilitationserfolges im Kniegelenk erreicht werden 24.
Schlussfolgerungen
Technische Assistenz ist eine wesentliche Voraussetzung für eine autonome, individuell angepasste Rehabilitation. Hierbei muss gewährleistet werden, dass der Patient während der Übung durch das Assistenzsystem individualisiert Anleitung und ständige Kontrolle erfährt. In der Rehabilitation muskuloskelettaler Erkrankungen lassen sich diese Voraussetzungen durch die Nutzung einfacher resistiver Elemente schaffen, wodurch sich der Rehabilitationserfolg verglichen mit anderen Rehabilitationsmethoden signifikant verbessern lässt. Selbstständiges physiotherapeutisches Üben, angeleitet und kontrolliert durch technische Assistenz, ermöglicht, dass der Patient nicht nur während der Rehabilitationsmaßnahme eine höhere Zahl von Übungen durchführen kann, sondern dass über die Rehabilitationsmaßnahme hinaus eine Fortführung des rehabilitativen Trainings im privaten Umfeld möglich wird.
Interessenskonflikt
Die Ergebnisse der vorliegenden Untersuchungen wurden teilweise bereits in der Fachzeitschrift „Neuroengineering and Rehabilitation” 25 publiziert sowie auf den Kongressen der DKOU und VSOU 26 vorgestellt. Die Untersuchungen zur Wirkung des technischen Assistenzsystems in der Rehabilitation von Patienten mit Knie-TEP wurden finanziell von der Deutschen Arthrose-Hilfe e. V. unterstützt. Das beschriebene technische Assistenzsystem – die autonome, individualisierte Therapie muskuloskelettaler Erkrankungen – wird derzeit nicht kommerziell verwertet.
Für die Autoren:
Univ.-Prof. Dr. rer. nat.
Catherine Disselhorst-Klug
Lehr- und Forschungsgebiet Rehabilitations- & Präventionstechnik
Institut für Angewandte Medizintechnik,
RWTH Aachen University
Pauwelsstr. 20
52074 Aachen
disselhorst-klug@hia.rwth-aachen.de
Begutachteter Beitrag/Reviewed paper
Disselhorst-Klug C, Bergamo F, Hennes M, Kohler F. Ein Feedback-Trainingssystem für selbstständiges physiotherapeutisches Üben. Orthopädie Technik, 2014; 65 (5): 86–92

- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Minns Lowe CJ, Barker KL, Dewey M, Sackley CM. Effectiveness of physiotherapy exercise after knee arthroplasty for osteoarthritis: systematic review and meta-analysis of randomised controlled trials. BMJ, 2007; 335 (7624): 812
- Kalra L, Ratan R. Recent advances in stroke rehabilitation. Stroke, 2007; 38: 235–237
- Bandholm T, Kehlet H. Physiotherapy exercise after fast-track total hip and knee arthroplasty: time for reconsideration? Arch Phys Med Rehabil, 2012; 93 (7): 1292–1294
- Bandholm T, Kehlet H. Physiotherapy exercise after fast-track total hip and knee arthroplasty: time for reconsideration? Arch Phys Med Rehabil, 2012; 93 (7): 1292–1294
- Jäckel WH, Müller-Fahrnow W, Schliehe F. Leitlinien der medizinischen Rehabilitation – Positionspapier der Deutschen Gesellschaft für Rehabilitationswissenschaften. Rehabilitation, 2004; 41: 279–285
- Patz T. Evidenzbasierte Armrehabilitation: Eine systematische Literaturübersicht. Der Nervenarzt, 2003; 74: 841–849
- Riener R. Robot-aided rehabilitation of neural function in the upper extremities. Acta Neurochir Suppl, 2007; 97 (1): 465–471
- Hesse S, Waldner A, Tomelleri C. Innovative gait robot for the repetitive practice of floor walking and stair climbing up and down in stroke patients. Journal of Neuroengineering and Rehabilitation, 2010; 7: 30
- Riener R. Robot-aided rehabilitation of neural function in the upper extremities. Acta Neurochir Suppl, 2007; 97 (1): 465–471
- Hesse S, Waldner A, Tomelleri C. Innovative gait robot for the repetitive practice of floor walking and stair climbing up and down in stroke patients. Journal of Neuroengineering and Rehabilitation, 2010; 7: 30
- Hennes M, Bollue K, Arenbeck H, Abel D, Disselhorst-Klug C. Patient-Tailored Supervision of Movement Performance During Endeffector-Based, Robot-Assisted Rehabilitation of Upper Extremities. Biomedizinische Technik/Biomedical Engineering, 2014, in press.
- Hennes M, Bollue K, Arenbeck H, Abel D, Disselhorst-Klug C. Patient-Tailored Supervision of Movement Performance During Endeffector-Based, Robot-Assisted Rehabilitation of Upper Extremities. Biomedizinische Technik/Biomedical Engineering, 2014, in press
- McClanachan NJ, Gesch J, Wuthapanich N, Fleming J, Kuys SS. Feasibility of gaming console exercise and its effect on endurance, gait and balance in people with an acquired brain injury. Brain Injury, 2013; 27 (12): 1402–1408
- Henderson A, Korner-Bitensky N, Levin M. Virtual reality in stroke rehabilitation: A systematic review of its effectiveness for upper limb motor recovery. Topics in Stroke Rehabilitation, 2007; 14 (2): 52–61
- Kohler F, Schmitz-Rode T, Disselhorst-Klug C. Introducing a Feedback Training System for Guided Home Rehabilitation. Journal of NeuroEngineering and Rehabilitation; 2010, 7: 2
- Kohler F, Schmitz-Rode T, Disselhorst-Klug C. Introducing a Feedback Training System for Guided Home Rehabilitation. Journal of NeuroEngineering and Rehabilitation; 2010, 7: 2
- Kohler F, Schmitz-Rode T, Disselhorst-Klug C. Introducing a Feedback Training System for Guided Home Rehabilitation. Journal of NeuroEngineering and Rehabilitation; 2010, 7: 2
- Kohler F, Schmitz-Rode T, Disselhorst-Klug C. Introducing a Feedback Training System for Guided Home Rehabilitation. Journal of NeuroEngineering and Rehabilitation; 2010, 7: 2
- Kohler F, Schmitz-Rode T, Disselhorst-Klug C. Introducing a Feedback Training System for Guided Home Rehabilitation. Journal of NeuroEngineering and Rehabilitation; 2010, 7: 2
- Kohler F, Schmitz-Rode T, Disselhorst-Klug C. Introducing a Feedback Training System for Guided Home Rehabilitation. Journal of NeuroEngineering and Rehabilitation; 2010, 7: 2
- Kohler F, Schmitz-Rode T, Disselhorst-Klug C. Introducing a Feedback Training System for Guided Home Rehabilitation. Journal of NeuroEngineering and Rehabilitation; 2010, 7: 2
- Bergamo F, Tingart M, Disselhorst-Klug C, Niethard FU. Schnellere muskuloskelettale Rehabilitation durch selbständiges, angeleitetes und kontrolliertes Training mithilfe eines intelligenten technischen Assistenzsystems (reha@on), DKOU Deutscher Kongress für Orthopädie und Unfallchirurgie, 2013, Oktober 22–25, Berlin
- Bergamo F, Tingart M, Disselhorst-Klug C, Niethard FU. Schnellere muskuloskelettale Rehabilitation durch selbständiges, angeleitetes und kontrolliertes Training mithilfe eines intelligenten technischen Assistenzsystems (reha@on), DKOU Deutscher Kongress für Orthopädie und Unfallchirurgie, 2013, Oktober 22–25, Berlin
- Bergamo F, Tingart M, Disselhorst-Klug C, Niethard FU. Schnellere muskuloskelettale Rehabilitation durch selbständiges, angeleitetes und kontrolliertes Training mithilfe eines intelligenten technischen Assistenzsystems (reha@on), DKOU Deutscher Kongress für Orthopädie und Unfallchirurgie, 2013, Oktober 22–25, Berlin
- Kohler F, Schmitz-Rode T, Disselhorst-Klug C. Introducing a Feedback Training System for Guided Home Rehabilitation. Journal of NeuroEngineering and Rehabilitation; 2010, 7: 2
- Bergamo F, Tingart M, Disselhorst-Klug C, Niethard FU. Schnellere muskuloskelettale Rehabilitation durch selbständiges, angeleitetes und kontrolliertes Training mithilfe eines intelligenten technischen Assistenzsystems (reha@on), DKOU Deutscher Kongress für Orthopädie und Unfallchirurgie, 2013, Oktober 22–25, Berlin
