Einleitung und Hintergrund
Ziel einer Prothesenversorgung ist es, dem „Urzustand” so nah wie möglich zu kommen 1. Dies beinhaltet sowohl die Rekonstruktion des äußeren Erscheinungsbildes als auch die Wiederherstellung der Bewegungsmöglichkeiten und Funktionen des zu ersetzenden Körperteils 2.
Der Prothesenschaft stellt in der orthopädietechnischen Versorgung das Bindeglied zwischen Prothese und Stumpf dar 3. Die Gestaltung des Prothesenschaftes unterliegt dabei den Vorgaben der DIN ISO-13405–1 und ‑2 4 5, welche sich auf die folgenden Schwerpunkte beziehen: Support, Stabilisation und Suspension sowie die Aufnahme des Stumpfvolumens. Unter dem Begriff des Supports wird die Übertragung von axialen Kräften zur Lastaufnahme verstanden. Stabilisation bezeichnet die Übertragung der horizontal gerichteten Kräfte zur Steuerung der Prothese, Suspension die Haftvermittlung zwischen Patient und Hilfsmittel. Die Anforderungen an einen Schaft sind somit vorgegeben. Schaftformen und ‑materialien unterliegen jedoch einer kontinuierlichen Weiterentwicklung, was die Umsetzung der definierten Vorgaben komplizierter gestaltet. Um für den Patienten dennoch eine bestmögliche Versorgung zu realisieren, ist das Zusammenspiel zwischen Prothesenaufbau, Stumpfbeschaffenheit und ‑funktion sowie Schaftgestaltung, ‑passform und ‑haftung zu koordinieren. Auch spielen die Kräfte, die auf den Stumpf wirken, eine bedeutende Rolle 6 7 8.
Der Einfluss der Prothesenversorgung und deren Aufbau (hier: untere Extremität) wird dabei vor allem im Gangbild eines Amputierten sichtbar. Wird das Kniepassteil beispielsweise zu weit anterior positioniert, führt dies zur Gefährdung der Stabilität und Sicherheit im Stand – für die Beugung des Prothesenknies wirkt sich dies zu Beginn der Schwungphase jedoch begünstigend aus. Ist das Kniepassteil mit seiner Gelenksachse zu weit posterior positioniert, verbessert es Stabilität und Sicherheit im Stand. Betrachtet man hingegen diese Positionierung in der Dynamik, wird deutlich, dass der erzielte Zugewinn an Sicherheit das Beugen des Prothesenknies zu Beginn der Schwungphase erschwert. Darüber hinaus verursacht das Verschieben des Kniegelenks nach posterior eine funktionelle Verlängerung der Prothese. Da es den meisten Fußpassteilen nicht möglich ist, eine aktive Dorsalextension durchzuführen, wirkt sich die Rückverlagerung entsprechend erschwerend auf die Durchführung der Schwungphase mit dem Prothesenbein aus. Um dennoch ein problemloses Durchschwingen zu ermöglichen und Stürze zu vermeiden, ist der Amputierte mit einer zu langen Prothese gezwungen, kompensatorische Bewegungen auszuführen. Dies äußert sich beispielsweise in einem Anheben der Hüfte oder einer Zirkumduktion im Hüftgelenk auf der Prothesenseite während der Schwungphase 9 10.
Doch selbst wenn die Länge der Prothese gut auf das Gangbild des Patienten abgestimmt ist, kann es zu einer Längenänderung des prothetisch versorgten Beines kommen: durch die sogenannte Pseudarthrose (Prothesenhub) zwischen Stumpf und Prothesenschaft. Darunter versteht man eine „relative Verlängerung” des prothetisch versorgten Beines in der Schwungphase und dessen „relative Verkürzung” in der Standphase. Neben einer Beeinträchtigung des Gangbildes können Pseudarthrosen darüber hinaus zu Schmerzen, Achsabweichungen und Instabilitäten führen. Der Prothesenhub kann dabei durch eine mangelnde Fixation des Stumpfes im Schaft hervorgerufen werden 11 12 13. Das Problem einer Längenänderung des prothetisch versorgten Beines lässt sich bei der Versorgung jedoch nicht vollständig vermeiden, da Art und Umfang des Weichteilgewebes des Patienten die Bewegung im Schaft beeinflussen. Das Ziel einer guten Schaftgestaltung sollte deshalb auch in der Minimierung des Prothesenhubs liegen und stellt auf diese Weise ein Qualitätsmerkmal in der orthopädietechnischen Versorgung dar.
Zur Erfassung des Prothesenhubs und zur Kategorisierung von dessen Ausmaß gibt es jedoch nur wenige wissenschaftliche Untersuchungen. So bearbeiteten Papaioannou et al. (2010) und Gholizadeh et al. (2011) beide den Prothesenhub bei transtibial amputierten Probanden, die Erfassung fand hierbei jedoch mit unterschiedlichen Messmethoden statt 14 15. Papaioannou et al. (2010) untersuchten 10 transtibial amputierte Probanden mit Hilfe einer dynamischen Röntgen-Stereogrammetrie-Analyse während unterschiedlicher Bewegungsaufgaben. Bei der Betrachtung der Resultate konnte abschließend (u. a.) festgestellt werden, dass beim Herabsteigen einer Stufe zwischen den Markern auf der Haut und den Markern auf dem Schaft ein Prothesenhub von bis zu 19 mm ersichtlich wurde 16. Gholizadehet al. (2011) untersuchten mit einem anderen Ansatz 5 transtibial amputierte Probanden, die mit einem Iceross-Silikonliner und einem Shuttle-Lock-System versorgt worden waren. Die Probanden wurden instruiert, im Rahmen der Studie fünf verschiedene Belastungssituationen durchzuführen. Dies wurde fotografisch dokumentiert. Die erfassten Bilder wurden anschließend als Datengrundlage zur Erfassung des Prothesenhubes herangezogen und hinsichtlich der Bewegung zwischen Liner und Schaft ausgewertet. Die Ergebnisse zeigten eine durchschnittliche Distanz von 9 mm im nichtbelasteten im Vergleich zum voll belasteten Zustand des Prothesenbeines 17. Beide Methoden waren somit in der Lage, eine Längenänderung bzw. den Hub bei transtibial amputierten Prothesenträgern zu erfassen.
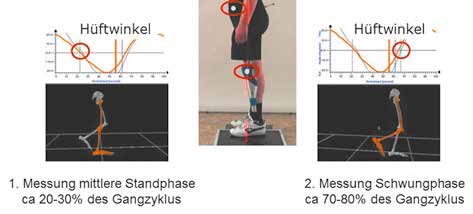
Im Fall von Oberschenkelamputierten gestaltet sich die Erfassung des Prothesenhubs jedoch komplizierter, da der Oberschenkelstumpf mit einem deutlich größeren Anteil an Weichteilgewebe bedeckt ist. So entwickelte Wühr 18 19 einen Ansatz zur Erhebung des Prothesenhubs bei Oberschenkelamputierten mit Hilfe einer 3‑D-kinematischen Bewegungsanalyse. Sie definierte den Prothesenhub in Bezug auf die angewandte Messtechnologie als Längenänderung des Abstandes des Spinen-Markers zum Marker am Kniedrehpunkt, erfasst zum Zeitpunkt der Neutral-Null-Stellung der Hüfte. Hierfür wurde zum einen die Länge des prothetisch versorgten Beines in der mittleren Standphase und somit unter Last ermittelt (ca. 20– 30 % des Gangzyklus). Zum anderen wurde die Länge des prothetisch versorgten Beines in der Schwungphase ermittelt (ca. 70–80 % des Gangzyklus). Die Differenz dieser beiden ermittelten Längen ergab den gesuchten Prothesenhub (Abb. 1).
Um dieses methodische Vorgehen zu prüfen, wurde diese Berechnung ebenfalls auf der erhaltenen Seite der untersuchten Probanden durchgeführt. Durchschnittlich zeigte sich hierbei eine Längenänderung von bis zu 1 mm, was im Bereich der Genauigkeit des angewandten Messsystems liegt und somit das entwickelte methodische Vorgehen bestärkt. Wühr legte bei ihrer Untersuchung – neben dem methodischen Vorgehen zur Erfassung des Hubes mit Hilfe 3‑D-kinematischer Messtechnik – einen weiteren Schwerpunkt auf die Gegenüberstellung des Hubausmaßes zweier unterschiedlicher Schaftformen: des tuberumgreifenden und des tuberunterstützenden Schafts. Diesbezüglich zeigten die Ergebnisse einen Hub von durchschnittlich 13,2 mm (71 % > 1 cm) für den tuberunterstützenden Schaft und einen Hub von durchschnittlich 7,09 mm (90 % < 1 cm) bei den Versorgungen mit tuberumgreifendem Schaft. Van Drongelen et al. (2013) lehnten sich an die methodische Herangehensweise von Wühr 20 21 an und untersuchten retrospektiv einen Datensatz von 69 transfemoral amputierten Patienten mit unterschiedlichen Schaftversorgungen auf den dynamischen Prothesenhub 22. Die Ergebnisse wiesen einen Hub von 12,8 ± 6,1 mm für das prothetisch versorgte Bein aus, für das erhaltene Bein wurde ein Hub von 1,4 ± 6,9 mm erfasst. Es konnten jedoch keine statistisch signifikanten Unterschiede zwischen den untersuchten Schaftformen ermittelt werden. Der Unterschied zwischen erhaltener und betroffener Seite war dagegen statistisch hoch signifikant, sodass auch hier das methodische Vorgehen nach Wühr 23 24 die Erfassung des Prothesenhubes ermöglichte.
Methodik
Das Verfahren, mittels 3‑D-kinematischer Messtechnik den Prothesenhub zu erfassen, unterliegt nach Wühr 25 26 allerdings einigen Einflussfaktoren: der Passgenauigkeit des Schaftes, der Stumpfbeschaffenheit, dem Volumen und Aussehen des Weichteilgewebes sowie dem Alter bzw. der Zeitspanne der Versorgung und dem Zeitpunkt der Amputation. Diese Faktoren sind jedoch im Rahmen der Bewertung einer Versorgung nicht modifizierbar, sondern lediglich zu dokumentieren. Darüber hinaus wird deutlich, dass die Position der verwendeten Spinen-Marker, die zur Berechnung des Hubes herangezogen werden, dem Einfluss der Beckenbewegung unterliegen; dies beeinträchtigt ebenfalls die Erhebung des Hubes.
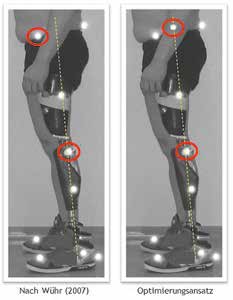
Im Rahmen eines interdisziplinären Austausches zur Erfassung des Prothesenhubs wurde in diesem Zusammenhang die Erweiterung des Ansatzes nach Wühr 27 28 durch einen weiteren Marker in der Modellberechnung beschlossen. Dieser Marker sollte auf der „Wirkungslinie des Hubes” und somit in der „Verlängerung der Trochanterachse” auf dem Beckenkamm positioniert werden. Um die Funktionalität des ergänzten Markers besser quantifizieren zu können, wurde dieser zugunsten der Reproduzierbarkeit für Pilotuntersuchungen auf der Cristailiaca platziert (Abb. 2). Diese Position ist deutlich zu palpieren und somit weniger fehleranfällig. Die Berechnung des Hubes fand dabei genau nach der Definition von Wühr 29 statt, um eine gute Vergleichbarkeit der Ergebnisse zu gewährleisten. Grundlage zur Berechnung der Längenänderung war hier jedoch die Distanz zwischen Cristailiaca-Marker und Kniedrehpunkt-Marker.
Die Messungen zur Erfassung des Prothesenhubes mit ergänztem Markerset fanden im Rahmen einer Pilotstudie statt. Die verwendete 3‑D-kinematische Messtechnik (Fa. Vicon, Großbritannien) des Bewegungsanalyselabors bestand hierbei aus 12 Infrarot-Kameras und 2 ergänzenden Videokameras und ist vergleichbar mit der Ausstattung der Studie von Wühr 30 31.
In Bezug auf die Wahl der Probanden wurden folgende Kriterien festgelegt: Die Probanden sollten mindestens der Mobilitätsklasse 2 (nach MDS) entsprechen und mit einem sitzbeinumgreifenden Schaftsystem versorgt sein. Der Schaft sollte mindestens ein Jahr, maximal aber drei Jahre alt sein, damit eine gewohnte, aber noch ausreichend gute Schaftsituation vorlag. Die Versorgung sollte aus einem dem Mobilitätsgrad angepassten mikroprozessorgesteuerten Kniepassteil und einem Carbonfederfuß bestehen.
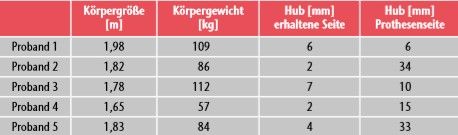
An der vorliegenden Pilotuntersuchung nahmen insgesamt 5 transfemoral amputierte Probanden teil (Ø: 47,4 ± 13,3 Jahre, 1,81 ± 0,1 m, 89,6 ± 22,3 kg, Tab. 1), wobei jeder der Probanden den Einschlusskriterien entsprach und mit seiner Versorgung zufrieden war. Die Teilnehmer wurden entsprechend der Vorgehensweise nach Wühr 32 33 palpiert und mit dem erweiterten Markerset versehen. Anschließend wurden die Probanden instruiert, auf einer vorgegebenen Laufstrecke (6 m) im Messfeld des Labors mit selbstgewählter Geschwindigkeit zu gehen.
Ergebnisse und Diskussion
Nach der Erhebung der Daten wurden diese gemäß der Fragestellung aufbereitet und hinsichtlich des Prothesenhubs analysiert. Die Erfassung des Hubs bezog sich bei dieser Pilotuntersuchung jedoch nicht auf einen Schafttypenvergleich vgl. 34, sondern auf die grundsätzliche Überprüfung des erweiterten Methodikansatzes. Demnach werden in der folgenden Ergebnisdarstellung die errechneten Hubwerte der Prothesenseite denen der erhaltenen Seite gegenübergestellt (Tab. 2).
Die Auswertung der erhobenen Daten zeigt einen durchschnittlichen Hub der erhaltenen Seite von 4,2 ± 2,3 mm und für die Prothesenseite einen mittleren Hubwert von 19,6 ± 13,1mm (siehe Tab. 2). Diese Werte sind mit denen von van Drongelen et al. 35 und Wühr 36 vergleichbar. Die Ergebnisse weisen somit darauf hin, dass der Einsatz des zusätzlichen Markers keine starken Wertabweichungen zur Folge hat.
Bei Betrachtung der probandenspezifischen Hubwerte wird deutlich, dass bei Proband 1 beidseitig ein Hubwert von 6 mm erfasst wurde. Da das Ausmaß des erfassten Hubs auf der erhaltenen Seite Weichteilbewegungen zugeschrieben werden kann, deutet ein gleiches Hubausmaß auf der Prothesenseite auf eine sehr gute Passform des Prothesenschaftes hin. Bei den Probanden 2, 3, 4 und 5 zeigt sich jedoch ein deutlicher Unterschied im Ausmaß des errechneten Hubes zwischen erhaltener Seite und Prothesenseite, insbesondere bei den Probanden 2 und 5. Der gemessene Hub der erhaltenen Seite fiel somit auch in dieser Untersuchung minimal aus und lag im Vergleich zur Literatur in einem realistischen Wertebereich. Die Unterschiede im Ausmaß der Hubwerte an der erhaltenen Seite können, wie bei Proband 1, auf die Weichteilbeschaffenheit der Probanden (siehe Tab. 1) zurückgeführt werden. Die deutlich höheren Werte des Prothesenhubs auf der versorgten Seite können neben der Weichteilbeschaffenheit zusätzlich durch eine nicht optimale Passform des Schaftes begründet sein.
Zusammenfassung und Ausblick
Die Ergebnisse der vorgestellten Pilotstudie zur Erfassung des Prothesenhubs zeigen, dass der erweiterte methodische Ansatz durch einen zusätzlichen Marker vergleichbare Werte zu Wühr 37 und van Drongelenet al. 38 liefert. Der zusätzliche Marker auf der Crista iliaca ermöglicht die Erfassung der Längenänderung in Wirkungslinie des Hubes. Zudem ließ sich die Markerplatzierung an der Crista iliaca in der Praxis problemloser umsetzen. Dies war vor allem bei Probanden mit viel Unterhautfettgewebe der Fall, bei denen es an den Spinen zu Markerverdeckungen gekommen war.
Um Aussagen über Validität und Reproduzierbarkeit dieses Verfahrens treffen zu können, sollte eine Folgestudie die Inhalte dieser Pilotuntersuchung aufgreifen und mit einem größeren Probandenkollektiv erneut durchgeführt werden. Auch könnten mit dem angewandten Verfahren zur Erfassung des Prothesenhubes perspektivisch Untersuchungen bezüglich Korrelationen zwischen Prothesenhub und Parametern wie Druckverteilung und Muskelaktivität im Schaft oder der Oberkörperbewegung vorgenommen werden, um weitere Informationen über den Einfluss des Prothesenhubs zu erhalten. Darüber hinaus sollte im Rahmen wissenschaftlicher Studien auch die Relevanz des Ausmaßes des erfassten Hubes untersucht werden, um den gemessenen Hub kategorisieren zu können vgl. 39.
Zusammenfassend kann festgestellt werden, dass sich der Prothesenhub mit Hilfe des erweiterten methodischen Ansatzes – der Distanzänderung zwischen dem zusätzlich eingesetzten Marker auf der Crista iliaca und dem Marker auf dem Kniedrehpunkt – bestimmen lässt und die erhobenen Ergebnisse mit denen anderer Labore vergleichbar sind.
Für die Autoren:
Dr. phil. Ann-Kathrin Hömme
Leiterin des Instituts für Messtechnik und Biomechanik (IMB)
Bundesfachschule für Orthopädie-Technik
Schliepstraße 6–8
44135 Dortmund
A.Hoemme@ot-bufa.de
Begutachteter Beitrag/reviewed paper
Hömme A, Wühr J, Sibbel B, Drerup B, Bieringer S. Der Prothesenhub als Mittel zur Qualitätskontrolle der Prothesenversorgung. Orthopädie Technik, 2015; 66 (3): 28–32

- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Baumgartner R, Botta P. Amputation und Prothesenversorgung. Indikationsstellung, operative Technik, Nachbehandlung, Funktionstraining, Rehabilitation. 3., vollst. überarb. Aufl. Stuttgart: Thieme, 2008
- Wühr J. Stumpfbewegungen im Schaft bei Oberschenkelamputierten. Untersuchungen mit dem Vicon-3D Bewegungssystem. Medizinisch-Orthopädische Technik, 2007; 127 (4): 7–12
- Wühr J, Linkemeyer L, Schüling S, Tiemeyer K, Drerup B, Wetz HH. Schaftsysteme im Vergleich. Orthopädie Technik, 2010; 61 (7): 506–511
- Prosthetics and orthotics – Classification and description of prosthetic components – Part 1. 1st ed. Geneva: International Organization for Standardization (International standard, ISO 13405–1), 1996
- Prosthetics and orthotics – Classification and description of prosthetic components – Part 2. 1st ed. Geneva: International Organization for Standardization (International standard, ISO 13405–2)
- Mensch G, Kaphingst W. Physiotherapie und Prothetik nach Amputation der unteren Extremität. Berlin u. a.: Springer, 1998
- Sibbel B, Kokegei D. Prothesenversorgung nach Amputationen an der unteren Extremität. OP-Journal, 2007; 23 (3): 218–227. doi: 10.1055/s‑2007–1019150
- Sibbel B, Bieringer S, Kokegei D. Versorgungskriterien der Schaftgestaltung nach transfemoraler Amputation. Medizinisch-Orthopädische Technik, 2006; 126: 53–60
- Mensch G, Kaphingst W. Physiotherapie und Prothetik nach Amputation der unteren Extremität. Berlin u. a.: Springer, 1998
- Sibbel B.Unterrichtsmaterialien zur Prothetik nach transfemoraler Amputation. Dortmund: Bundesfachschule für Orthopädie-Technik, 2014
- Wühr J. Stumpfbewegungen im Schaft bei Oberschenkelamputierten. Untersuchungen mit dem Vicon-3D Bewegungssystem. Medizinisch-Orthopädische Technik, 2007; 127 (4): 7–12
- Sibbel B.Unterrichtsmaterialien zur Prothetik nach transfemoraler Amputation. Dortmund: Bundesfachschule für Orthopädie-Technik, 2014
- Hohmann D, Uhlig R. Orthopädische Technik. 9., überarbeitete und neu gestaltete Auflage. Stuttgart: Thieme, 2004
- Papaioannou G, Mitrogiannis C, Nianios G, Fiedler G. Assessment of amputee socket-stump-residual bone kinematics during strenuous activities using Dynamic Roentgen Stereogrammetric Analysis. Journal of Biomechanics, 2010; 43 (5): 871–878. doi: 10.1016/j.jbiomech.2009.11.013
- Gholizadeh H, Abu Osman NA, Lúvíksdóttir Á, Eshraghi A, Kamyab M, Abas WA. A new approach for the pistoning measurement in transtibial prosthesis. Prosthetics and Orthotics International, 2011; 35 (4): 360–364
- Papaioannou G, Mitrogiannis C, Nianios G, Fiedler G. Assessment of amputee socket-stump-residual bone kinematics during strenuous activities using Dynamic Roentgen Stereogrammetric Analysis. Journal of Biomechanics, 2010; 43 (5): 871–878. doi: 10.1016/j.jbiomech.2009.11.013
- Gholizadeh H, Abu Osman NA, Lúvíksdóttir Á, Eshraghi A, Kamyab M, Abas WA. A new approach for the pistoning measurement in transtibial prosthesis. Prosthetics and Orthotics International, 2011; 35 (4): 360–364
- Wühr J. Stumpfbewegungen im Schaft bei Oberschenkelamputierten. Untersuchungen mit dem Vicon-3D Bewegungssystem. Medizinisch-Orthopädische Technik, 2007; 127 (4): 7–12
- Wühr J, Linkemeyer L, Schüling S, Tiemeyer K, Drerup B, Wetz HH. Schaftsysteme im Vergleich. Orthopädie Technik, 2010; 61 (7): 506–511
- Wühr J. Stumpfbewegungen im Schaft bei Oberschenkelamputierten. Untersuchungen mit dem Vicon-3D Bewegungssystem. Medizinisch-Orthopädische Technik, 2007; 127 (4): 7–12
- Wühr J, Linkemeyer L, Schüling S, Tiemeyer K, Drerup B, Wetz HH. Schaftsysteme im Vergleich. Orthopädie Technik, 2010; 61 (7): 506–511
- van Drongelen S, Richter K, Block J, Wolf S. Dynamisches Messverfahren für die Bestimmung des Prothesenhubs bei transfemoral Amputierten an Hand von Ganganalysedaten. In: Tagungsband der 8. Jahrestagung der Deutschen Gesellschaft für Biomechanik (DGfB), 15.–17.05.2013, Neu-Ulm: 97
- Wühr J. Stumpfbewegungen im Schaft bei Oberschenkelamputierten. Untersuchungen mit dem Vicon-3D Bewegungssystem. Medizinisch-Orthopädische Technik, 2007; 127 (4): 7–12
- Wühr J, Linkemeyer L, Schüling S, Tiemeyer K, Drerup B, Wetz HH. Schaftsysteme im Vergleich. Orthopädie Technik, 2010; 61 (7): 506–511
- Wühr J. Stumpfbewegungen im Schaft bei Oberschenkelamputierten. Untersuchungen mit dem Vicon-3D Bewegungssystem. Medizinisch-Orthopädische Technik, 2007; 127 (4): 7–12
- Wühr J, Linkemeyer L, Schüling S, Tiemeyer K, Drerup B, Wetz HH. Schaftsysteme im Vergleich. Orthopädie Technik, 2010; 61 (7): 506–511
- Wühr J. Stumpfbewegungen im Schaft bei Oberschenkelamputierten. Untersuchungen mit dem Vicon-3D Bewegungssystem. Medizinisch-Orthopädische Technik, 2007; 127 (4): 7–12
- Wühr J, Linkemeyer L, Schüling S, Tiemeyer K, Drerup B, Wetz HH. Schaftsysteme im Vergleich. Orthopädie Technik, 2010; 61 (7): 506–511
- Wühr J. Stumpfbewegungen im Schaft bei Oberschenkelamputierten. Untersuchungen mit dem Vicon-3D Bewegungssystem. Medizinisch-Orthopädische Technik, 2007; 127 (4): 7–12
- Wühr J. Stumpfbewegungen im Schaft bei Oberschenkelamputierten. Untersuchungen mit dem Vicon-3D Bewegungssystem. Medizinisch-Orthopädische Technik, 2007; 127 (4): 7–12
- Wühr J, Linkemeyer L, Schüling S, Tiemeyer K, Drerup B, Wetz HH. Schaftsysteme im Vergleich. Orthopädie Technik, 2010; 61 (7): 506–511
- Wühr J. Stumpfbewegungen im Schaft bei Oberschenkelamputierten. Untersuchungen mit dem Vicon-3D Bewegungssystem. Medizinisch-Orthopädische Technik, 2007; 127 (4): 7–12
- Wühr J, Linkemeyer L, Schüling S, Tiemeyer K, Drerup B, Wetz HH. Schaftsysteme im Vergleich. Orthopädie Technik, 2010; 61 (7): 506–511
- Wühr J, Linkemeyer L, Schüling S, Tiemeyer K, Drerup B, Wetz HH. Schaftsysteme im Vergleich. Orthopädie Technik, 2010; 61 (7): 506–511
- van Drongelen S, Richter K, Block J, Wolf S. Dynamisches Messverfahren für die Bestimmung des Prothesenhubs bei transfemoral Amputierten an Hand von Ganganalysedaten. In: Tagungsband der 8. Jahrestagung der Deutschen Gesellschaft für Biomechanik (DGfB), 15.–17.05.2013, Neu-Ulm: 97
- Wühr J. Stumpfbewegungen im Schaft bei Oberschenkelamputierten. Untersuchungen mit dem Vicon-3D Bewegungssystem. Medizinisch-Orthopädische Technik, 2007; 127 (4): 7–12
- Wühr J. Stumpfbewegungen im Schaft bei Oberschenkelamputierten. Untersuchungen mit dem Vicon-3D Bewegungssystem. Medizinisch-Orthopädische Technik, 2007; 127 (4): 7–12
- van Drongelen S, Richter K, Block J, Wolf S. Dynamisches Messverfahren für die Bestimmung des Prothesenhubs bei transfemoral Amputierten an Hand von Ganganalysedaten. In: Tagungsband der 8. Jahrestagung der Deutschen Gesellschaft für Biomechanik (DGfB), 15.–17.05.2013, Neu-Ulm: 97
- Wühr J. Stumpfbewegungen im Schaft bei Oberschenkelamputierten. Untersuchungen mit dem Vicon-3D Bewegungssystem. Medizinisch-Orthopädische Technik, 2007; 127 (4): 7–12
