Dabei konnten situationsabhängige Unterschiede bezüglich der Funktionsqualität und des Sicherheitspotenzials dieser Kniegelenke auf die unterschiedlichen technologischen Konzepte und Steuerungsalgorithmen zurückgeführt werden. Die Erkenntnisse sprechen dafür, dass das C‑Leg 4 dem Anwender in alltäglichen Situationen höhere Sicherheitsreserven bietet.
Menschen mit einer Oberschenkelamputation sind im Alltag auf die sichere und zuverlässige Funktionsweise ihres Prothesenkniegelenks angewiesen; dies gilt unabhängig vom Mobilitätsgrad des Betroffenen. Das Prothesenkniegelenk muss in jeder Situation des Stehens und Gehens ohne besondere Aufmerksamkeit und ohne motorische Kompensationen vom Anwender genutzt werden können. Situationen wie das Gehen auf unebenem Untergrund, auf Treppen und Schrägen oder auch unvorhersehbare Störungen des Bewegungsablaufes stellen hohe Anforderungen an das Prothesenkniegelenk. Mikroprozessorgesteuerte Kniegelenke detektieren anhand von Sensoren in spezifischen Steh-und Gehsituationen Bewegungen und Belastungen, um über Dämpfungselemente situationsabhängig unterschiedliche Gelenkwiderstände bereitzustellen. Dabei bestimmen im Wesentlichen das technologische Konzept und der Steuerungsalgorithmus die Funktionsqualität und die Sicherheit gegen eine unkontrollierbare Kniebeugung. Durch eine zuverlässige und sichere Funktionsweise des Prothesenkniegelenks kann die Sturzhäufigkeit nachgewiesenermaßen deutlich reduziert werden 12 3. Aufgrund des sich dadurch ergebenden höheren Vertrauens in das Hilfsmittel 45 können die Anwender ihre Aktivität und auch ihren alltäglichen Bewegungsradius steigern67. Die Funktionsqualität und das Sicherheitspotenzial mikroprozessorgesteuerter Kniegelenke unterscheiden sich jedoch teilweise erheblich, wie bereits in biomechanischen und klinischen Studien belegt wurde [89101112. Zum biomechanischen Vergleich der Sicherheitspotenziale sind nur wenige Studien bekannt, die zudem nicht mit den aktuellen Generationen der Gelenke durchgeführt wurden 13141516 Gegenstand der hier vorgestellten Studie ist es, die Funktionsqualität von zwei aktuellen mikroprozessorgesteuerten Kniegelenken in sicherheitsrelevanten Alltagssituationen mit biomechanischen Methoden zu untersuchen. Es sollte geprüft werden, ob zwischen den Gelenken Differenzierungsmerkmale bezüglich der Funktionsqualität und der Sicherheit existieren, die als klinisch relevanter Faktor für die Rehabilitation von Personen mit einer Oberschenkelamputation von Bedeutung sind.
Methode und Setup
Probanden
Sechs aktive einseitig oberschenkelamputierte Personen (Mobilitätsgrad 3+ bis 4) nahmen an dieser Studie teil (Alter 56,2 ± 8,7 Jahre, Masse 78,7 ± 9,6 kg, Körpergröße 180,8 ± 3,1 cm). Die Probanden hatten zum Zeitpunkt der Messung keine weiteren Komorbiditäten, keine Schaftpassformprobleme oder temporäre Erkrankungen. Sie verfügen über langjährige Erfahrungen mit unterschiedlichen mikroprozessorgesteuerten Prothesenkniegelenken und können diese vollumfänglich nutzen. Die Probanden wurden über das Ziel und die Anforderungen der bevorstehenden Studie aufgeklärt und gaben ihr schriftliches Einverständnis, freiwillig an der Studie teilzunehmen. Die Studie wurde von der Ethikkommission der Universitätsmedizin Göttingen (UMG) genehmigt und in Übereinstimmung mit der Deklaration von Helsinki durchgeführt.
Prothetische Versorgung in der Studie
Es wurden zwei mikroprozessorgesteuerte Kniegelenke untersucht:
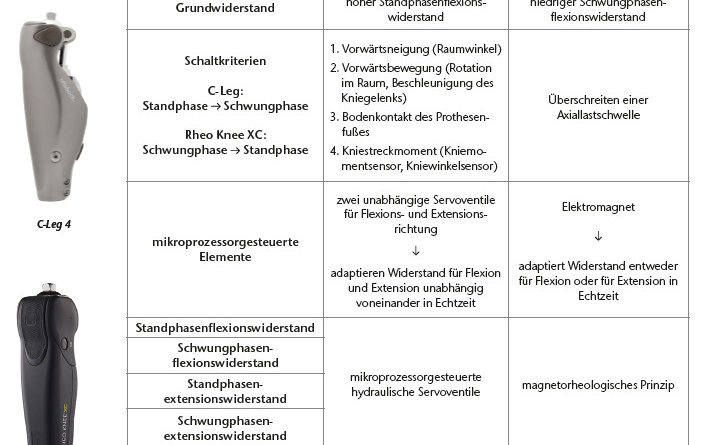
Die Gelenke unterscheiden sich in ihren technischen Eigenschaften (Tab. 1) 17181920, was wiederum Einfluss auf die untersuchten Situationen haben kann. Das C‑Leg 4 verfügt über eine Linearhydraulik, mit der die Widerstände in Flexions-und Extensionsrichtung unabhängig voneinander generiert werden. Im Grundzustand befindet sich das Gelenk im „Default-Stance“-Modus, das heißt, es liegt ein hoher Standphasenbeugewiderstand an. Das Rheo Knee XC dagegen nutzt zur Widerstandsgenerierung ein magnetorheologisches Prinzip, wobei der erzeugte Widerstand gleichzeitig für Flexions-und Extensionsrichtung gilt. Im Grundzustand befindet sich das Gelenk im „Default-Swing“-Modus, also im niedrigen Schwungphasenflexionswiderstand. Alle Testprothesen wurden mit dem Carbonfederfuß „Triton“ (Otto Bock, Duderstadt, Deutschland) ausgestattet.
Der Prothesenaufbau und die Gelenkeinstellungen erfolgten gemäß etablierten Empfehlungen 2122 im Rahmen der Herstellerangaben durch einen für die Gelenke zertifizierten CPO. Um funktionelle Differenzen der Kniegelenke ausschließlich auf die Eigenschaften der Kniegelenke zurückführen zu können, ist ein identischer Prothesenaufbau für biomechanische Vergleichsstudien obligatorisch. Dies wurde im Versorgungsprozess sichergestellt (Tab. 2). Den Probanden wurde mit einem halben Tag ausgiebig Zeit gegeben, um sich an die Funktionsweise der Kniegelenke zu gewöhnen23.
Experimentelles Setup
Folgende sicherheitsrelevante Alltagssituationen wurden untersucht: – Gehen mit kleinen Schritten – Gehen auf der Treppe und auf einer Schräge – Rückwärtsgehen – Hängenbleiben des Fußes in der Schwungphase
Kleine Schritte: Die Schrittlänge wurde durch Markierungen auf ca. 40 cm begrenzt. Untersucht wurde das Gehen auf festem sowie auf einem bei Belastung leicht nachgebenden Untergrund (Holzboden).
Gehen auf der Treppe und auf einer Schräge: Es wurden Messungen beim Hinabgehen einer vierstufigen Treppe und beim Hinab-und Hinaufgehen einer um 10° geneigten Schräge mit einer Länge von 3 Metern durchgeführt. Die Bodenreaktionskraft wurde auf der dritten Treppenstufe von oben und in der Mitte der Rampe gemessen. Ein Handlauf konnte optional genutzt werden. Die Versuchsanordnung ist den Publikationen von Schmalz et al. zu entnehmen 2425.
Rückwärtsgehen: Die Probanden wurden aufgefordert, aus dem Stand in selbstgewählter Gehgeschwindigkeit alternierend rückwärts zu gehen. Aus Sicherheitsgründen wurden sie dabei mit einer speziellen Weste ausgerüstet, die an einem Deckenschienensystem höhenverstellbar angebracht ist und den Gang des Probanden nicht beeinflusst 26.
Hängenbleiben des Fußes in der Schwungphase: Die Versuchsdurchführung erfolgte analog zu Blumentritt et al.27 [21]. Das prothesenseitige Hängenbleiben der Fußspitze am Boden wurde durch Störung der Schwungphasenextension mit einem leichten Zug an einem Faden während des ebenen Gehens simuliert. Der Faden wurde über dem Knöcheladapter angebracht. Die Probanden wurden vorher nicht darüber informiert, bei welchem der Versuche die Störung erfolgte. Aus Sicherheitsgründen wurden die Probanden für diese Messungen ebenfalls mit der Sicherheitsweste geschützt.
Zur Objektivierung des Sicherheitspotenzials von Prothesenkniegelenken eignet sich eine messende Ganganalyse, wie bereits mehrfach publiziert wurde 282930. Die Bodenreaktionskräfte wurden mit zwei piezoelektrischen Kraftmessplatten (Typ 9287A, Kistler Instrumente AG, Winterthur, Schweiz) erfasst. Zur Messung der kinematischen Parameter wurde ein optoelektronisches Kamerasystem (Vicon MX, Vicon Motion Systems Ltd., Oxford, Großbritannien) mit 12 Infrarotkameras verwendet. Aus den kinematischen und kinetischen Daten wurden über alle Probanden Gruppenmittelwerte für folgende Parameter berechnet:
- Zeit-Distanz-Parameter: Gehgeschwindigkeit, Schrittlänge, Standphasendauer
- Kinematik: Gelenkwinkel, Gelenkwinkelgeschwindigkeiten
- Kinetik: Bodenreaktionskräfte, externe Gelenkmomente
Für den Versuch „Kleine Schritte“ wurden zusätzlich jeweils die Schritte identifiziert, bei denen das Gelenk zu Beginn der Schwungphase nicht korrekt in den niedrigen Schwungphasenwiderstand schaltet. Eine Mittelwertbildung erscheint bei den Versuchen „Rückwärtsgehen“ und „Hängenbleiben des Fußes in der Schwungphase“ nicht zweckmäßig. Hier wurden die Einzelversuche analysiert, um das Verhalten der Kniegelenke in diesen Situationen zu charakterisieren. Ausführliche Beschreibungen zu den Kniegelenken und zur Methodik sind 31zu entnehmen.
Ergebnisse
| Kategorie | Parameter | C‑Leg 4 | Rheo Knee XC | Signifikanz |
| Statik (Abstand der Lastlinie zum jeweiligen Bezugspunkt) | Trochanter major | 17,2 ± 18,6 mm | 17,5 ± 17,9 mm | 0 |
| Kniegelenksdrehachse | 29,2 ± 1,8 mm | 30,0 ± 2,1 mm | 0 | |
| Malleolus lateralis | 66,0 ± 13,6 mm | 64,5 ± 13,3 mm | 0 | |
| Statik (Abstand der Körper-schwerpunktlinie zum jeweiligen Bezugspunkt) | Trochanter major | 2,7 ± 13,2 mm | 3,0 ± 17,3 mm | 0 |
| Kniegelenksdrehachse | 16,2 ± 9,1 mm | 19,3 ± 7,8 mm | 0 | |
| Malleolus lateralis | 55,8 ± 20,8 mm | 57,5 ± 12,8 mm | 0 | |
| Kleine Schritte | erfolgreiche Schwungphasenauslösung | fester Untergrund: 91,7% | fester Untergrund: 100% | n. a. |
| nachgebender Untergrund: 85,4% | nachgebender Untergrund: 100% | n. a. | ||
| maximaler Knieflexionswinkel in der Schwungphase | 46,2 ± 7,9° | 44,8 ± 4,7° | 0 | |
| Treppe abwärts | Knieflexionswinkel bei Stufenkontakt | 2 ± 0,6° | 4 ± 4,3° | 0 |
| maximale Kniewinkelgeschwindigkeit Standphasenflexion | 176,4 ± 12,7 °/s | 203,4 ± 33,0°/s | 0 | |
| maximale Kniewinkelgeschwindigkeit Schwungphasenextension | 323,4 ± 33,8°/s | 188,5 ± 40,7°/s | X | |
| maximales Knieflexionsmoment | 1,14 ± 0,13 Nm/kg | 0,90 ± 0,08 Nm/kg | X | |
| Schräge abwärts | maximaler Knieflexionswinkel | 67,8 ± 5,9° | 63,0 ± 1,0° | 0 |
| maximale Kniewinkelgeschwindigkeit Schwungphasenextension | 373,1 ± 48,6°/s | 291,6 ± 36,9°/s | X | |
| Hüftstreckung (75 % bis 100 % GZ) | 4,4 ± 2,7° | 6,8 ± 2,0° | 0 | |
| maximales Knieflexionsmoment | 0,85 ± 0,11 Nm/kg | 0,77 ± 0,07 Nm/kg | X | |
| Schräge aufwärts | maximaler Knieflexionswinkel | 60,7 ± 2,6° | 54,7 ± 5,7° | 0 |
| maximale Kniewinkelgeschwindigkeit Schwungphasenextension | 377,9 ± 91,1°/s | 314,6 ± 69,5°/s | X | |
| Hängenbleiben | Knieflexionswinkel bei Bodenkontakt < 40° | keine Kompensation: 58,3% | keine Kompensation: 37,5% | n. a. |
| Kompensation: 41,7% | Kompensation: 62,5% | |||
| Sturz: 0% | Sturz: 0% | |||
| Knieflexionswinkel bei Bodenkontakt > 40° | keine Kompensation: 33,3% | keine Kompensation: 0% | n. a. | |
| Kompensation: 60% | Kompensation: 26,7% | |||
| Sturz: 6,7% | Sturz: 73,3% |
Tab. 2 Mittelwerte und Standardabweichungen prothesenseitiger Parameter der untersuchten Situationen. Methode zur Prüfung
auf statistische Signifikanz: Wilcoxon-Test p < 0,05 = signifikant (X), nicht signifikant (0), nicht anwendbar (n. a.).
Kleine Schritte
Das Rheo Knee XC schaltete bei allen untersuchten kleinen Schritten zuverlässig in die Schwungphase. Mit dem C‑Leg wurde die Schwungphase bei etwa 90 % der Schritte ausgelöst. Dabei war die prozentuale Schwungphasenauslösung auf festem Untergrund etwa 6 % höher als auf dem nachgebenden Untergrund. Der maximale Knieflexionswinkel war bei korrekter Schwungphasenauslösung mit beiden Gelenken annähernd identisch (Tab. 2).
Gehen auf der Treppe
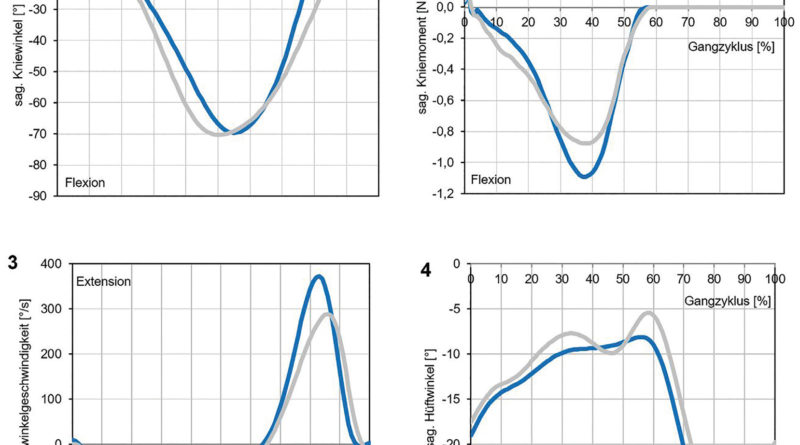
Bei Stufenkontakt war das Rheo Knee XC im Gruppenmittel 2° stärker flektiert als das C‑Leg. Ab ca. 25 % GZ beugte das Rheo Knee XC deutlich schneller ein. Die Streckung des Kniegelenks in der Schwungphase verlief mit dem C‑Leg schneller. Bei 100 % GZ befand sich das Rheo Knee XC noch in der Streckbewegung. Das maximale Knieflexionsmoment war mit dem C‑Leg etwa 27 % höher als mit dem Rheo Knee XC (Abb. 1, Tab. 2).
Gehen auf der Schräge
Abwärts: Der maximale Knieflexionswinkel zu Beginn der Schwungphase war mit dem C‑Leg etwa 5° höher als mit dem Rheo Knee XC. Die Streckung des Kniegelenks in der Schwungphase verlief mit dem C‑Leg schneller als mit dem Rheo Knee XC. Zum Ende der Schwungphase wurde das Oberschenkelsegment mit dem Rheo Knee XC stärker in Streckung gebracht. Bei Fersenauftritt war der Oberschenkelsegmentwinkel mit dem Rheo Knee XC etwas gestreckter alsmit dem C‑Leg. Das maximale Knieflexionsmoment war mit dem C‑Leg etwa 10 % höher als mit dem Rheo Knee XC (Abb. 1, Tab. 2).
Aufwärts: Das Rheo Knee XC erreichte in der Schwungphase einen 6° niedrigeren maximalen Knieflexionswinkel als das C‑Leg. Die Streckung in der terminalen Schwungphase verlief mit dem Rheo Knee XC langsamer; bei 100 % GZ befand sich das Gelenk noch in der Streckbewegung (Tab. 2).
Rückwärtsgehen
Mit dem Rheo Knee XC konnte in einigen Versuchsdurchgängen eine unkontrollierbare Knieflexion beobachtet werden. Dabei beugte das Prothesenkniegelenk zunächst beim Schritt mit der Prothese nach hinten in der Schwungphase ein, sodass mit vorflektiertem Knie aufgetreten wurde und dieses anschließend unkontrollierbar flektierte. Dabei war es irrelevant, ob der erste Schritt mit der Prothese oder der kontralateralen Seite ausgeführt wurde. Mit dem C‑Leg war die Prothese bei allen Rückwärtsschritten stabil belastbar. Exemplarisch sind in Abbildung 2 zwei Einzelversuche eines Probanden dargestellt.
Hängenbleiben des Fußes in der Schwungphase
Die Versuche wurden nach dem sagittalen Kniewinkel der Prothese bei prothesenseitigem Bodenkontakt nach der Störung der Schwungphasenextension in zwei Winkelbereichen angeordnet:
- Kniewinkel bei Bodenkontakt kleiner als 40°: Es ließen sich mit beiden Kniegelenken ab einem Kniewinkel von größer als 25° Kompensationen erkennen. Die Anzahl der Versuche mit Kompensation war mit dem C‑Leg etwa 20 % geringer. Während das C‑Leg bis zu einem Kniewinkel von 40° bei nahezu allen Versuchen extendiert werden konnte, war dies mit dem Rheo Knee XC bei weniger Versuchen möglich (Tab. 2).
- Kniewinkel bei Bodenkontakt größer als 40°: Mit dem C‑Leg führte lediglich ein Versuch mit einem Kniewinkel von mehr als 50° zum Sturz, und es konnte nahezu bei der Hälfte der Versuche noch extendiert werden. Das Rheo Knee XC konnte ab einem Kniewinkel von 40° bei keinem der Versuche mehr extendiert werden. Etwa 70 % der Versuche führten zu einem Sturz (Tab. 2).
Diskussion
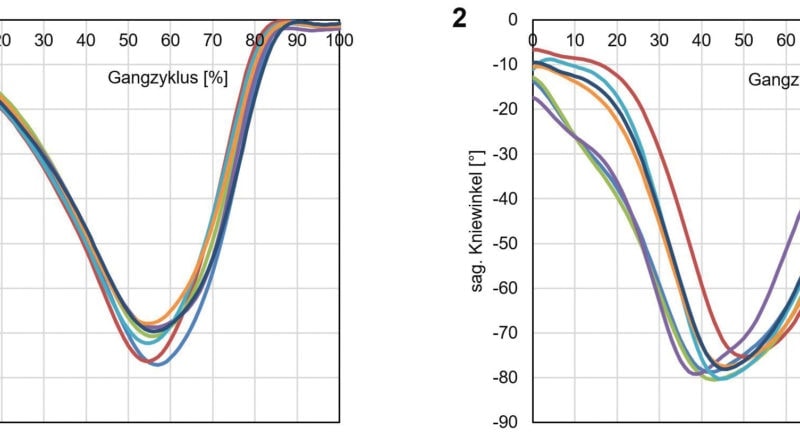
Eines der Sturzrisiken amputierter Personen ist das Hängenbleiben des Prothesenfußes in der Schwungphase, das im Wesentlichen von der Bodenfreiheit beim Durchschwingen beeinflusst wird. Die Bodenfreiheit wird primär über eine korrekte Schwungphasenauslösung und einen ausreichend großen Knieflexionswinkel von mehr als ca. 40° erreicht. Bei langsamerer Gehgeschwindigkeit oder beim Gehen mit kleinen Schritten verringert sich der maximale Knieflexionswinkel prothesenseitig tendenziell. Dieser war bei korrekter Schwungphasenauslösung bei beiden Gelenken mit etwa 45° annähernd identisch. Das Rheo Knee XC schaltete bei allen kleinen Schritten zuverlässig in die Schwungphase; mit dem C‑Leg konnten etwa 90 % der Schritte ausgelöst werden. Beim Gehen mit kleinen Schritten scheint das „Default-Swing“-Prinzip bezüglich der Schwungphasenauslösung daher Vorteile zu bieten. Auch beim Hinabgehen der Treppe konnten sicherheitsrelevante Unterschiede festgestellt werden. Um den Prothesenfuß exakt auf der Treppenstufe positionieren zu können, sollte sich das Kniegelenk unmittelbar vor Stufenkontakt in einer reproduzierbaren Streckendlage befinden 3233343536. Während mit dem C‑Leg eine konstante Streckendlage erreicht wurde, variierte diese beim Rheo Knee XC erheblich, wodurch sich auch das Einbeugeverhalten als inkonsistent darstellte. Exemplarisch sind in Abbildung 3 die Einzelverläufe des Kniewinkels für einen Probanden mit beiden Gelenken dargestellt. Um das Gelenk vor Fersenauftritt in die volle Streckung zu bringen, führten einige Anwender eine bewusste kompensatorische Streckbewegung des Stumpfes aus, so wie es auch auf der Rampe beobachtet wurde (Abb. 1).
Weiterhin sollte das Prothesenkniegelenk einen konsistenten internen Flexionswiderstand während der prothesenseitigen Einbeinstandphase erzeugen, der eine hohe Tragfähigkeit der Prothese gewährleistet und damit beim folgenden Stufenkontakt zur Entlastung der erhaltenen Seite beiträgt. 3738394041. Während das Rheo Knee XC zu Beginn der Standphase einen höheren Widerstand generierte, stieg der Widerstand zum Ende der Standphase mit dem C‑Leg deutlich stärker an und erreichte ein etwa 25 % höheres Maximum, was zu einer höheren Tragfähigkeit der Prothese führt. Die Widerstandscharakteristik in Kombination mit einem reproduzierbaren und zuverlässigen Erreichen der Streckendlage sprechen daher für ein höheres Sicherheitspotenzial mit dem C‑Leg beim Hinabgehen einer Treppe. Wie auf der Treppe erzeugte das Rheo Knee XC auch beim Hinabgehen einer Schräge zum Ende der Standphase weniger Flexionswiderstand als das C‑Leg. Die Ergebnisse zeigen, dass beim Rheo Knee XC zu Beginn der Beugung ein zunächst hoher Widerstand wirkt, der im Verlauf der Beugung signifikant nachlässt. Die geringere Kniewinkelgeschwindigkeit des Rheo Knee XC bei Schwungphasenextension bestätigt, dass die Anwender auch auf der Schräge aktiv die unzureichende Streckbewegung ausgleichen mussten. Dazu führten sie in der terminalen Schwungphaseeine verstärkte kompensatorische Oberschenkelsegmentstreckung aus, sodass das Kniegelenk aufgrund der Massenträgheit des Unterschenkelsegmentes wieder die Streckendlageerreichte. Beim Hinaufgehen der Schräge erreichte das Rheo Knee XC im Mittel einen 6° niedrigeren maximalen Knieflexionswinkel. Das kann dazu führen, dass beim Durchschwingen des Prothesenbeines in der Schwungphase der Abstand zwischen Prothesenfuß und Boden geringer ist, was wiederum ein erhöhtes Stolperrisiko darstellen kann. Wie auch beim Abwärtsgehen der Schräge extendierte das Rheo Knee XC in der terminalen Schwungphase deutlich langsamer und erreichte in dieser Gangsituation erst unmittelbar vor Fersenauftritt die Streckendlage.
Das zuverlässige und präzise Schalten zwischen Stand-und Schwungphase in jeglichen Alltagsituationen, so auch beim Rückwärtsgehen, ist für den Prothesenträger ein elementares Sicherheitskriterium. Ein ausbleibender hoher Standphasenflexionswiderstand kann in den meisten Fällen vom Anwender nicht kompensiert werden. Häufig kommt es dann zum Gelenkkollaps und damit zum Sturz 42. Beim Rückwärtsgehen zeigte sich ein sicherheitskritischer Nachteil des beim Rheo Knee XC genutzten „Default-Swing“-Prinzips: Führt der Anwender die unbelastete Prothese nach hinten, liegt lediglich der niedrige Schwungphasenflexionswiderstand an. So kann das Prothesenkniegelenk aufgrund der Massenträgheit des Unterschenkelsegmentes noch vor Bodenkontakt flektieren, sodass bei Belastung der vorflektierten Prothese die Schaltbedingungen nicht reproduzierbar erfüllt werden und somit nur der niedrige Schwungphasenflexionswiderstand wirkt. Mit dem C‑Leg werden beim Rückwärtsgehen nicht alle Schaltkriterien erfüllt. Daher bleibt das Gelenk im Standphasenmodus mit hohem Flexionswiderstand und bietet damit eine sicher belastbare Prothese. Nach einer gestörten Schwungphasenextensionsbewegung wie beim Stolpern hängt das Sturzrisiko für Personen mit einer Oberschenkelamputation von mehreren Faktoren ab.
Diese sind vorrangig:
- Kniebeugewinkel bei folgendem prothesenseitigem Bodenkontakt
- Reaktionsschnelligkeit des Anwenders
- Stumpfleistungsfähigkeit
- Eigenschaften des Prothesenkniegelenks
Je größer der Kniebeugewinkel bei Störung der Schwungphase und folgendem Bodenkontakt ist, desto stärker muss der Anwender durch kompensatorische Bewegungen einem Sturz entgegenwirken. Im Regelfall versucht der Anwender, das Kniegelenk möglichst frühzeitig nach Bodenkontakt durch eine Stumpfextension zu strecken. Um die Kniestreckung schnellstmöglich durchführen zu können, sollte das Kniegelenk dabei einen niedrigen Extensionswiderstand und gleichzeitig einen hohen Flexionswiderstand bieten, falls das Gelenk nicht mehr in Streckung gebracht werden kann 43. Diese Kriterien sind beim C‑Leg aufgrund des genutzten Hydrauliksystems erfüllt. Mit dem Rheo Knee XC hingegen wird nur ein Widerstand erzeugt, der gleichzeitig für Flexions-und Extensionsrichtung gilt. Eine Streckung des Kniegelenks gegen einen niedrigen Widerstand kann daher erst nach dem Umschalten vom hohen Flexions-in den niedrigen Extensionswiderstand erfolgen. Somit ist eine Streckung des Kniegelenks im Vergleich zum C‑Leg erschwert.
Fazit
Die zuverlässige und sichere Funktionsweise von Exoprothesenkomponenten, insbesondere von Kniegelenken, stellt die technische Basis für eine erfolgreiche Rehabilitation von Menschen mit einer Oberschenkelamputation dar – unabhängig vom Mobilitätsgrad. Gegenstand der Studie war es, die klinisch relevanten Parameter „Sicherheit“ und „Funktionsqualität“ zu untersuchen. Mit Hilfe einer objektiven biomechanischen Analyse konnten funktionelle und sicherheitsrelevante Vor-und Nachteile festgestellt werden, die auf die unterschiedlichen technologischen Konzepte und Steuerungsalgorithmen zurückzuführen sind. Der Vergleich mit Ergebnissen aus Studien mit den jeweiligen Vorgängerversionen der Gelenke zeigt, dass sich zwar die Funktionsqualität und das Sicherheitspotenzial teilweise verbessert haben, dass bekannte Vor-beziehungsweise Nachteile aber nach wie vor bestehen 4445. So sprechen die Ergebnisse dieser Studie dafür, dass das C‑Leg 4 dem Anwender in alltäglichen sicherheitsrelevanten Situationen Vorteile gegenüber dem Rheo Knee XC bietet.
Interessenkonflikt
Alle Autoren sind Mitarbeiter der FirmaOtto Bock SE & Co. KGaA. Die untersuchten mikroprozessorgesteuerten Prothesenkniegelenke stammen von unterschiedlichen Herstellern.
Für die Autoren:
Thomas Maximilian Köhler
Research Engineer Research Biomechanics
Clinical Research & Services
Otto Bock SE & Co. KGaA
Hermann-Rein-Str. 2a
37075 Göttingen
thomasmaximilian.koehler@ottobock.de
Begutachteter Beitrag/reviewed paper
Köhler TM, Bellmann M, Schmalz T. Zwei mikroprozessorgesteuerte Prothesenkniegelenke im Vergleich: Gibt es Unterschiede in sicherheitsrelevanten Alltagssituationen? Orthopädie Technik, 2019; 70 (11): 24–41

- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Hahn A, Lang M. Effects of mobility grade, age and etiology on functional benefit and safety of subjects evaluated in more than 1200 C‑Leg trial fittings in Germany. J Prosthet Orthot, 2015; 37 (3): 86–94
- Hafner BJ, Smith DG. Differences in function and safety between Medicare Functional Classification Level‑2 and ‑3 transfemoral amputees and influence of prosthetic knee joint control. J Rehabil Res Dev, 2009; 46 (3): 417–433
- Highsmith MJ, Kahle JT, Shepard NT, Kaufman KR. The effect of the C‑Leg knee prosthesis on sensory dependency and falls during sensory organisation testing. Technology and Innovation, 2014; 2013 (4): 343–347
- Hahn A, Lang M. Effects of mobility grade, age and etiology on functional benefit and safety of subjects evaluated in more than 1200 C‑Leg trial fittings in Germany. J Prosthet Orthot, 2015; 37 (3): 86–94
- Greitemann B, Niemeyer C, Lechler K, Ludviksdottir A. Verbesserung der Teilhabe durch ein mikroprozessorgesteuertes Prothesenkniegelenk – erste Erfahrungen einer Kohortenstudie. Med Orth Tech, 2011; 131: 90–101
- Hahn A, Lang M. Effects of mobility grade, age and etiology on functional benefit and safety of subjects evaluated in more than 1200 C‑Leg tria
- Hafner BJ, Smith DG. Differences in function and safety between Medicare Functional Classification Level‑2 and ‑3 transfemoral amputees and influence of prosthetic knee joint control. J Rehabil Res Dev, 2009; 46 (3): 417–433
- Bellmann M, Schmalz T, Blumentritt S. Comparative Biomechanical Analysis of Current Microprocessor-Controlled Prosthetic Knee Joints. Arch Phys Med Rehabil, 2010; 91 (4): 644–652
- Bellmann M, Schmalz T, Ludwigs E, Blumentritt S. Unmittelbare Effekte eines neuen mikroprozessorgesteuerten Prothesenkniegelenks: Eine vergleichende biomechanische Analyse. Arch Phys Med Rehabil, 2012; 93 (3): 541– 49
- Bellmann M, Schmalz T, Blumentritt S. Funktionsprinzipien aktueller Mikroprozessor gesteuerter Prothesenkniegelenke. Orthopädie Technik, 2009 ; 60 (5): 1–6
- Blumentritt S, Bellmann M. Potenzielle Sicherheit von aktuellen nicht-mikroprozessor- und mikroprozessorgesteuerten Prothesenkniegelenken. Orthopädie Technik, 2010; 61 (11): 788–799
- Thiele J, Westebbe B, Bellmann M, Kraft M. Designs and performance of microprocessor-controlled knee joints. Biomed Tech, 2014; 59 (1): 65–77
- Bellmann M, Schmalz T, Blumentritt S. Comparative Biomechanical Analysis of Current Microprocessor-Controlled Prosthetic Knee Joints. Arch Phys Med Rehabil, 2010; 91 (4): 644–652
- Blumentritt S, Bellmann M. Potenzielle Sicherheit von aktuellen nicht-mikroprozessor- und mikroprozessorgesteuerten Prothesenkniegelenken. Orthopädie Technik, 2010; 61 (11): 788–799
- Johansson JL, Sherril DM, Riley PO, Bonato P, Herr H. A clinical comparison of variable-damping and mechanically passive prosthetic knee devices. Am J Phys Med Rehabil, 2005; 84 (8): 563–575
- Sepin M, Kastner J, Strohmer C. Bergabgehen – ein Kniepassteilvergleich. Orthopädie Technik, 2010; 61 (4): 245–249
- Bellmann M, Schmalz T, Blumentritt S. Funktionsprinzipien
aktueller Mikroprozessor gesteuerter Prothesenkniegelenke. Orthopädie Technik, 2009 ; 60 (5): 1–6 - Kampas P, Seifert D. Das neue C‑Leg: neue Funktionen und neue Technologie. Orthopädie Technik, 2015; 66 (10): 1–4
- Kampas P, Seifert D. Das neue C‑Leg: neue Funktionen und neue Technologie. Orthopädie Technik, 2015; 66 (10): 1–4
- Herr H, Wilkenfield A. User-adaptive control of a magnetorheological
prosthetic knee. Industrial Robot: An International Journal, 2003; 30 (1): 42–55 - Otto Bock Healthcare GmbH (Hrsg.). Aufbauempfehlungen für TF-Modular-Beinprothesen: 646F219=D‑10–1210. Duderstadt: Ottobock
- Bellmann M, Blumentritt S, Pusch M, Schmalz T, Schönemeier M. Das 3D L.A.S.A.R – eine neue Generation der Statik-Analyse zur Optimierung des Aufbaus von Prothesen und Orthesen. Orthopädie Technik, 2017; 66 (12): 18–25
- Schmalz T, Bellmann M, Pröbsting E, Blumentritt S. Effects of adaption to a fully new prosthetic lower limb component: results of biomechanical tests immediately after fitting and after 3 month use. J Prosthet Orthot, 2014; 26 (3): 134–143
- Schmalz T, Blumentritt S, Altenburg B. Biomechanische Analyse des Schrägen- und Treppengehens mit aktuellen Kniepassteilen. Orthopädie Technik, 2006; 57 (9): 682–693
- Schmalz T, Blumentritt S, Marx B. Biomechanical analysis of stair ambulation in lower limb amputees. Gait posture, 2007; 25 (2): 267–278
- Blumentritt S, Schmalz T, Jarasch R. The Safety of C‑Leg: Biomechanical Tests. J Prosthet Orthot, 2009; 21 (1): 2–14
- Blumentritt S, Schmalz T, Jarasch R. The Safety of C‑Leg: Biomechanical Tests. J Prosthet Orthot, 2009; 21 (1): 2–14
- Bellmann M, Schmalz T, Blumentritt S. Comparative Biomechanical Analysis of Current Microprocessor-Controlled Prosthetic Knee Joints. Arch Phys Med Rehabil, 2010; 91 (4): 644–652
- Blumentritt S, Bellmann M. Potenzielle Sicherheit von aktuellen nicht-mikroprozessor- und mikroprozessorgesteuerten Prothesenkniegelenken. Orthopädie Technik, 2010; 61 (11): 788–799
- Blumentritt S, Schmalz T, Jarasch R. The Safety of C‑Leg: Biomechanical Tests. J Prosthet Orthot, 2009; 21 (1): 2–14
- Bellmann M, Köhler TM, Schmalz T. Comparative biomechanical
evaluation of two technologically different microprocessor-controlled prosthetic knee joints in safety-relevant dailylife situations. Biomed Tech (Berl), 2019; 64 (4): 407–420 - Bellmann M, Schmalz T, Blumentritt S. Comparative Biomechanical
Analysis of Current Microprocessor-Controlled Prosthetic Knee Joints. Arch Phys Med Rehabil, 2010; 91 (4): 644–652 - Bellmann M, Schmalz T, Ludwigs E, Blumentritt S. Unmittelbare Effekte eines neuen mikroprozessorgesteuerten Prothesenkniegelenks: Eine vergleichende biomech
- Bellmann M, Schmalz T, Blumentritt S. Funktionsprinzipien aktueller Mikroprozessor gesteuerter Prothesenkniegelenke.
Orthopädie Technik, 2009 ; 60 (5): 1–6 - Blumentritt S, Bellmann M. Potenzielle Sicherheit von aktuellen nicht-mikroprozessor- und mikroprozessorgesteuerten Prothesenkniegelenken. Orthopädie Technik, 2010; 61 (11): 788–799
- Schmalz T, Blumentritt S, Altenburg B. Biomechanische Analyse des Schrägen- und Treppengehens mit aktuellen Kniepassteilen. Orthopädie Technik, 2006; 57 (9): 682–693
- Bellmann M, Schmalz T, Blumentritt S. Comparative Biomechanical Analysis of Current Microprocessor-Controlled Prosthetic Knee Joints. Arch Phys Med Rehabil, 2010; 91 (4): 644–652
- Bellmann M, Schmalz T, Ludwigs E, Blumentritt S. Unmittelbare Effekte eines neuen mikroprozessorgesteuerten Prothesenkniegelenks: Eine vergleichende biomechanische Analyse. Arch Phys Med Rehabil, 2012; 93 (3): 541–549
- Bellmann M, Schmalz T, Blumentritt S. Funktionsprinzipien aktueller Mikroprozessor gesteuerter Prothesenkniegelenke. Orthopädie Technik, 2009 ; 60 (5): 1–6
- Blumentritt S, Bellmann M. Potenzielle Sicherheit von aktuellen nicht-mikroprozessor- und mikroprozessorgesteuerten
Prothesenkniegelenken. Orthopädie Technik, 2010; 61 (11): 788–799 - Schmalz T, Blumentritt S, Altenburg B. Biomechanische
Analyse des Schrägen- und Treppengehens mit aktuellen Kniepassteilen. Orthopädie Technik, 2006; 57 (9): 682–6 - Blumentritt S, Schmalz T, Jarasch R. The Safety of C‑Leg:
Biomechanical Tests. J Prosthet Orthot, 2009; 21 (1): 2–14 - Bellmann M, Schmalz T, Blumentritt S. Comparative Biomechanical Analysis of Current Microprocessor-Controlled Prosthetic Knee Joints. Arch Phys Med Rehabil, 2010; 91 (4):
644–652 - Bellmann M, Schmalz T, Blumentritt S. Comparative Biomechanical Analysis of Current Microprocessor-Controlled Prosthetic Knee Joints. Arch Phys Med Rehabil, 2010; 91 (4): 644–652
- Blumentritt S, Bellmann M. Potenzielle Sicherheit von aktuellen nicht-mikroprozessor- und mikroprozessorgesteuerten
Prothesenkniegelenken. Orthopädie Technik, 2010; 61 (11): 788–799
