Einleitung
Mit Einführung der Mechatronik in die Prothetik der unteren Extremität hat Ottobock den Stand der Technik für die Versorgung von Anwendern der Mobilitätsgrade 3 und 4 definiert. Der Fokus beim C‑Leg-Kniegelenksystem liegt auf dem sicheren Gehen in verschiedenen Geschwindigkeiten sowie auf Rampen und Treppen. Zwei Zusatzmodi ermöglichen die Unterstützung zusätzlicher Aktivitäten des täglichen Lebens 1. Beim Genium und Genium X3 ist das Ziel, das Gangbild physiologischer zu gestalten und damit eine deutliche Verringerung der Ungleichheit zwischen natürlicher Körperfunktion und künstlichem Ersatz zu erreichen. Verschiedene Aktivitäten des täglichen Lebens werden durch Funktionen unterstützt, die nicht wie Zusatzmodi bewusst aktiviert werden müssen, sondern möglichst intuitiv in der Situation unterstützen, ohne Aufmerksamkeit vom Anwender zu benötigen 2.

Studien haben ergeben, dass auch Anwender des Mobilitätsgrades 2 von mechatronischen Kniegelenken wie dem C‑Leg Compact profitieren 3 4. Aus diesem Anlass wurden die spezifischen Bedürfnisse von Anwendern niedrigerer Mobilitätsgrade genauer analysiert, um auf die Aktivitäten des täglichen Lebens dieser Anwender durch neuartige Funktionen einzugehen. Die Hypothese lautet, dass gerade Anwender niedriger Mobilität und eingeschränkter Motorik von moderner Technologie besonders profitieren können und damit für diese Anwender größere Erfolge im Rehabilitationsergebnis erzielt werden können. Das Ergebnis ist das Kenevo, ein mikroprozessorgesteuertes Kniegelenksystem, welches auf die Bedürfnisse von Amputierten der Mobilitätsgrade 1 und 2 eingeht (Abb. 1).
Anwendergruppen
Die Analyse der Bedürfnisse der Anwender der Mobilitätsgrade 1 und 2 ergab drei Anwendergruppen:
- Für die Anwendergruppe A ist die größte Herausforderung das Aufstehen und Hinsetzen. Einmal aufgestanden gehen diese Anwender nur wenige Schritte. Oft benutzen sie auch weitere Hilfsmittel wie beispielsweise Gehhilfen oder einen Rollstuhl. Nichtsdestotrotz ist das Vertikalisieren ein wichtiger Bestandteil der Rehabilitation und der Selbstständigkeit dieser Anwender. Sie benötigen eher ein gesperrtes Knie, um jederzeit Kontrolle und Sicherheit über die Prothese zu haben, und legen weniger Wert auf eine höhere Mobilität, die durch eine Schwungphasenauslösung ermöglicht wird.
- Für die Anwendergruppe B stellt das Aufstehen und Hinsetzen durchaus auch noch eine Hürde dar, sie sind aber bereits beschränkt im Außenbereich unterwegs. Diese Anwender nutzen zumindest zeitweise noch Hilfsmittel wie Gehhilfen und bevorzugen die Sicherheit eines während der Standphase gesperrten Knies. Sie gehen nicht alternierend Treppen oder Rampen hinunter. Eine Auslösung der Schwungphase ermöglicht ihnen eine erhöhte Sicherheit (Bodenfreiheit), verringerte Kompensationsbewegungen und verbesserte Mobilität.
- Die Anwendergruppe C ist fähig, alternierend Treppen und Rampen bergab zu gehen, ist aber nur mit niedriger oder mittlerer Gehgeschwindigkeit unterwegs.
Es ist wichtig festzustellen, dass die fixe Zuordnung der Anwender zu einer Anwendergruppe gerade für Anwender mit niedrigem Mobilitätsgrad oft nicht möglich ist, da sich die Mobilität dieser Anwender durch den Rehabilitations- oder Krankheitsfortschritt oft kurzfristig verändert. Wenn z. B. eine wichtige Hürde gemeistert und Vertrauen in die Prothese gewonnen wird, sind Sprünge zwischen den Anwendergruppen möglich.
Aktivitätsmodi
Für die unterschiedlichen Anwendergruppen wurden spezifische Aktivitätsmodi programmiert:
- Der Aktivitätsmodus A „Locked Mode“ für die Anwendergruppe A erkennt das Aufstehen und Hinsetzen automatisch und unterstützt den Anwender in dieser Situation durch spezifische Widerstandsverläufe. Beim Gehen bleibt das Kniegelenksystem gesperrt.
- Der Aktivitätsmodus B/B+„SemiLocked Mode“ für die Anwendergruppe B erkennt und unterstützt das Aufstehen und Hinsetzen wieder Aktivitätsmodus A. Das Kenevo bleibt während der Standphase gesperrt; es ist jedoch möglich, die Schwungphase auszulösen. Das Kniegelenksystem überwacht die gesamte Schwungphase und schaltet im Falle eines Stolperns auf einen erhöhten Widerstand. Im Aktivitätsmodus B+ „Semi LockedMode mit Standphasenbeugung“ ist eine begrenzte Standphasenbeugung möglich.
- Im Aktivitätsmodus C für die Anwendergruppe C ist das Kenevo während der Standphase nicht gesperrt, sondern bleibt auf hohem Widerstand. Damit ist das alternierende Herabgehen von Treppen und Rampen möglich. Es kann zudem die Schwungphase ausgelöst werden. Das Kniegelenksystem überwacht dabei die gesamte Schwungphase und schaltet im Falle eines Stolperns auf einen erhöhten Widerstand. Das Aufstehen und Niedersetzen wird weiterhin durch spezifische Widerstandsverläufe unterstützt. Bleibt der Anwender stehen, unterstützt ihn die intuitive Stehfunktion.
Eine eigene Funktion erlaubt es in allen Aktivitätsmodi, beim Sitzen im Rollstuhl das Knie in einer fast gestreckten Position zu sperren, sodass die Prothese beim Fahren ohne Auflage nicht unter den Rollstuhl gezogen wird.
Die Aktivitätsmodi können nach den temporären Bedürfnissen der Anwender gewählt werden. Das Kniegelenksystem eignet sich damit zur Anpassung des Prothesensystems an den Therapiefortschritt oder den Krankheitsverlauf eines Anwenders.
Technologie
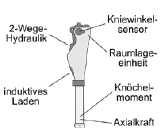
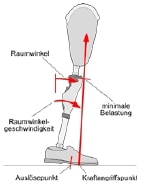
Das Kenevo-Beinprothesensystem ist ein mikroprozessorgesteuertes, einachsiges Kniegelenksystem. Es verwendet eine Hydraulik mit dem bereits vom C‑Leg bekannten 2‑Wege-Prinzip, bei der die Widerstände in Flexions- und Extensionsrichtung unabhängig voneinander durch den Mikroprozessor 100-mal pro Sekunde stufenlos gestellt werden können 5. Die Sensoren umfassen eine Axialkraftmessung, eine Knöchelmomentmessung, einen Kniewinkel- und Kniewinkelgeschwindigkeitssensor sowie eine neuartige 6‑achsige Raumlageeinheit (Inertial Motion Unit, IMU), welche die Lage und Rotationsgeschwindigkeit des Kniegelenksystems im Raum bestimmt (Abb. 2).
Die Funktionen im Detail
Das unterstützte Hinsetzen
Das Bedürfnis
Anwender mit hohem Sicherheitsbedürfnis werden oft mit einem Sperr- oder Bremsknie versorgt, weil diese Gelenke das gewünschte Sicherheitsgefühl beim Gehen und Stehen bieten. Beim Hinsetzen sind diese Gelenke aber oft verunsichernd. Die Gehhilfe muss losgelassen werden, um die Sperre zu entriegeln, und wenn das Gelenk einmal freigeschaltet ist, gibt es keine Unterstützung beim Hinsetzen. Der sicherheitsbedürftige und zumeist motorisch eingeschränkte Anwender muss alles mit der kontralateralen Seite kompensieren und kommt in eine unsichere und motorisch anspruchsvolle Situation.
Die Lösung
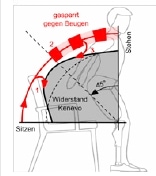
Das gesperrte Kenevo erkennt über eine patentierte Steuerung, die auf der Raumlageeinheit beruht, die Bewegung der Hüfte nach hinten und löst kontinuierlich die Sperre, wenn die Prothese belastet ist (Abb. 3). Sollte das Hinsetzen abgebrochen werden, wird die Sperre wieder aktiviert. Während des Hinsetzens regelt das Gelenksystem den Widerstand so, dass über den gesamten Beugewinkel jeweils der benötigte Widerstand eingestellt wird – anfangs etwas niedriger, in der Mitte der Beugung etwas höher und gegen Schluss wieder etwas niedriger (Abb. 4).
Der Vorteil
Der Anwender hat beim Hinsetzen somit seine Hände frei und kann sich z. B. an einer Gehhilfe oder an der Armstütze des Stuhls festhalten. Während des Hinsetzens kann er beide Beine belasten; die Prothese unterstützt ihn beim Hinsetzen mit einem kontrollierten Widerstand. Der Körperschwerpunkt kann in der Mitte zwischen den Beinen bleiben; der Anwender hat eine breitere Unterstützungsfläche und muss nicht auf einem Bein balancieren. Er gewinnt an Stabilität und Sicherheit.
Das unterstützte Aufstehen
Das Bedürfnis
Sperr- oder Bremsknie bieten dem Anwender keine Unterstützung, sollte der Aufstehvorgang abgebrochen werden. Der Anwender muss das Hinsetzen mit der kontralateralen Seite oder den Händen abfangen. Gerade bei einem abgebrochenen Aufstehvorgang ist aber damit zu rechnen, dass der Anwender nicht in der Lage ist, das zu tun. Er fällt somit meistens ungebremst in den Stuhl zurück, fühlt sich verunsichert und kann sich dabei sogar verletzen.
Die Lösung
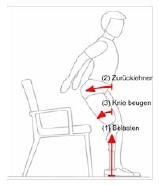
Während Kenevo für das Aufstehen den Extensionswiderstand niedrig schaltet, ist die Widerstandscharakteristik für das Hinsetzen in Flexionsrichtung aktiv (1 in Abb. 5). Ab 45° gestreckter Position sperrt das Gelenk in Beugerichtung (2 in Abb. 5), um ein Zurücksinken zu verhindern. Sollte der Anwender es nicht schaffen, durch die Unterstützung der Sperre aufzustehen, erkennt das Gelenksystem über die Raumlageeinheit die Rückwärtsbewegung der Hüfte und schaltet in die Funktion zum unterstützten Hinsetzen um (3 in Abb. 5).
Der Vorteil
Sollte der Anwender das Aufstehen abbrechen und sich doch wieder hinsetzen wollen, wird er vom Kenevo beim Hinsetzen unterstützt. Wenn ihm das Aufstehen fast gelingt, wird ihn das Gelenk mit einer Sperre unterstützen. Die Sperre wird wieder gelöst, falls der Anwender zurückzufallen droht. Er wird situationsbedingt in seiner Bewegung unterstützt und kann daher auf seine Prothese vertrauen.
Die Schwungphasenauslösung im Aktivitätsmodus B/B+
Das Bedürfnis
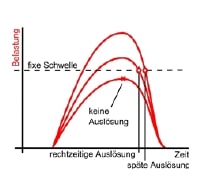
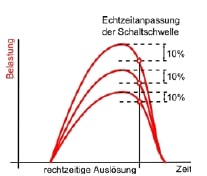
Anwender mit niedrigen Mobilitätsgraden haben oft ein stark asymmetrisches Gangmuster mit großer Variabilität. Sie benutzen oft Gehhilfen, die die Belastung der Prothese beeinflussen. Herkömmliche Technologien zur Schwungphasenauslösung — seien sie mechanisch oder mechatronisch – kommen damit schlecht zurecht, weil die Algorithmen auf klar ausgeprägten Sensorsignalverläufen beruhen und fixe Schwellwerte verwenden. Die Folge ist, dass der Zeitpunkt der Schwungphasenauslösung oft nicht erkannt wird und die Prothese zu haken beginnt (Abb. 6). Dreht man die Schwellwerte so weit hinunter, dass die Schwungphase öfter ausgelöst wird, besteht wiederum die Gefahr, dass das Kniegelenk auch unter Bedingungen nachgibt, unter denen dies nicht gewünscht ist. Letztendlich werden die Anwender oft mit einem Sperrknie versorgt, welches ihnen die Stabilität gibt, die sie benötigen, sie aber in ihrer Mobilität behindert.
Die Lösung
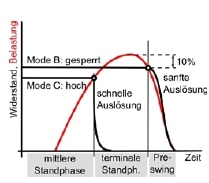
Kenevo bestimmt die Schwelle zum Auslösen der Schwungphase für jeden Schritt neu. Erst wenn die Belastung der Prothese in der terminalen Standphase nach dem Maximum abnimmt (Abb. 7) und wenn die Raumlageeinheit eine Vorwärtsneigung und eine Vorwärtsrotation erkannt hat, wird die Schwungphase freigeschaltet. Das passiert entsprechend dem Bedürfnis der Anwender später als bei aktiveren Anwendern (Abb. 9). Dabei reduziert das Kniegelenk den Widerstand nicht schlagartig, sondern verringert ihn kontinuierlich mit sinkender Belastung. Sollte der Anwender wider Erwarten den Schritt abbrechen und die Prothese doch wieder belasten, wird der Widerstand sofort angehoben, um den Anwender zu unterstützen. Während der gesamten Schwungphase wird die Prothese durch den Stolperschutz Plus (siehe unten) überwacht.
Der Vorteil
Der Anwender profitiert dadurch von der Sicherheit, dass die Schwungphase weitgehend unabhängig von seinem Gangmuster und der Verwendung von Gehhilfen korrekt ausgelöst wird. Sein Sicherheitsbedürfnis wird gleichzeitig mit seinem Bedürfnis nach Mobilität erfüllt. Er kann auf die Prothese vertrauen und damit seine Mobilität verbessern.
Die Schwungphasenauslösung im Aktivitätsmodus C
Das Bedürfnis
Obwohl auch Anwender mit hohem Mobilitätsgrad 2 durchaus noch unregelmäßige Schritte machen und teilweise Gehhilfen benutzen, wäre die Schwungphasenauslösung wie zuvor beschrieben für ihr dynamischeres Gehverhalten zu spät und zu langsam. Die Prothese könnte bei manchen Schritten haken oder sich „zu langsam“ anfühlen.
Die Lösung
Kenevo verwendet im Aktivitätsmodus C einen dem Genium verwandten Algorithmus, um die Schwungphase auszulösen. Wenn die Bodenreaktionskraft während der Standphase über die Fußmitte nach vorne gewandert ist und gleichzeitig die Raumlageeinheit eine Vorwärtsneigung und eine Vorwärtsrotation erkannt hat, wird die Schwungphase freigeschaltet (Abb. 8) 6. Der niedrige Schwungphasenwiderstand wird gegenüber dem Aktivitätsmodus B/B+ also früher und schneller erreicht (Abb. 9). Auch im Aktivitätsmodus C wird die Prothese während der gesamten Schwungphase durch den Stolperschutz Plus (siehe unten) überwacht.
Der Vorteil
Da die Lage und nicht die Größe der Bodenreaktionskraft für die Auslösung der Schwungphase ausschlaggebend ist, werden Schwankungen wie z. B. durch ein Abstützen an Gehhilfen kompensiert. Das Timing der Auslösung unterstützt die Bedürfnisse der Anwender, die sich in ihrer Rehabilitation schon an der Grenze zu Mobilitätsgrad 3 befinden. Kenevo unterstützt die zunehmende Mobilität.
Stolperschutz Plus
Das Bedürfnis
Anwender mit niedrigen Mobilitätsgraden haben beschränkte motorische Fähigkeiten und Kraft, um ein Stolpern zu kontrollieren. Ein unregelmäßiges Gangmuster macht aber die Wahrscheinlichkeit eines Stolperns z. B. durch ein Hängenbleiben mit der Zehe in der Schwungphase höher.
Die Lösung
Alle mechatronischen Ottobock-Kniegelenke bieten anhand der 2‑Wege-Hydraulik und „defaultstance“ inhärente Sicherheit während der Schwungphasenextension, während der ein Hängenbleiben mit der Zehe meistens passiert. Während der Extension ist das Flexionsventil schon präventiv auf Standphasenwiderstand eingestellt und wird damit bei einer Bewegungsumkehr durch ein Stolpern sofort wirksam. Der Stolperschutz Plus erweitert dieses Konzept um zwei Aspekte: Einerseits wird der Flexionswiderstand während der Schwungphasenextension über den Wert der Standphase hinaus erhöht. So wird in dieser Situation, in der das Gelenk plötzlich mit hohen Kräften in gebeugter Stellung belastet wird, zusätzliche Unterstützung gegeben. Andererseits wird die Bewegung des Gelenks auch in der Schwungphasenflexion überwacht. Sobald Kenevo eine von einer normalen Schwungphase abweichende Bewegung erkennt, wird der Flexionswiderstand ebenso auf einen Wert über dem Standphasenwiderstand erhöht.
Der Vorteil
Der erhöhte Widerstand unterstützt den Anwender in einer kritischen Situation. Dadurch wird es für ihn leichter, ein Stolpern zu kontrollieren und damit das Sturzrisiko zu reduzieren.
Anwendergruppen, Aktivitätsmodi und Funktionen im Überblick
Durch die unterschiedlichen Aktivitätsmodi eignet sich das neue Kniegelenk besonders gut, um Anwender als therapieunterstützendes Hilfsmittel im Rehabilitationsprozess zu begleiten. Die Funktionalität kann an die wachsende Fähigkeit des Anwenders oder auch an therapeutische Rückschritte angepasst werden. Das zertifizierte Fachpersonal kann mittels einer PC-Einstellsoftware (K‑Soft) und der im Kenevo integrierten BluetoothSchnittstelle die Einstellungen anpassen und den Aktivitätsmodus wählen. Die Einstellsoftware unterstützt die Einstellung mit patientenindividuellen Vorschlägen und beim Aufbau der Prothese. Die Aufbauempfehlung entspricht der Ottobock-Standardempfehlung für monozentrische, mechatronische Kniegelenksysteme wie das C‑Leg.
Design für den Alltag
Neben den Funktionen zur spezifischen Unterstützung der Aktivitäten des Alltags spielt auch das Gewicht einer Prothese für diese Anwendergruppen eine überproportional wichtige Rolle. So wurde auf besonders kompaktes und leichtes Design geachtet. Kenevo ist mit einer minimalen distalen Systemhöhe von 270 mm und einem Gewicht von 915 g deutlich kleiner und leichter als andere mikroprozessorgesteuerte Kniegelenke. Es ist für Anwender bis 125 kg Körpergewicht freigegeben.
Die induktive Ladeeinheit ist auch für motorisch eingeschränkte Anwender leicht anzulegen. Der als Zubehör erhältliche Protektor bietet Schutz für das Gelenk, natürliches Volumen und ein den Vorlieben der Anwendergruppe entsprechendes Design.
Fazit
Das neue System wurde entwickelt, um den spezifischen Bedürfnissen von Anwendern mit niedriger Mobilität gerecht zu werden. Die Funktionen gehen aus einer ganzheitlichen Betrachtung der Aktivitäten des Alltags typischer Anwendergruppen hervor und erlauben es, den Rehabilitationsprozess zu begleiten. Zur Bestätigung der Hypothese wurden klinische Studien begonnen, welche die guten Ergebnisse des Feldtests bestätigen sollen. Der Hersteller ist überzeugt, Menschen mit dem Kenevo Mobilität zu ermöglichen, die Gefahr laufen, diese vollständig zu verlieren, und damit Technologie denen zugänglich zu machen, die sie am meisten brauchen.
Für die Autoren:
Dipl.-Ing. Philipp Kampas, MBA
Otto Bock Healthcare GmbH
Brehmstraße 16 • 1110 Wien
Philipp.Kampas@ottobock.com
Begutachteter Beitrag/reviewed paper
Kampas Ph, Seifert D. Technologie und Funktionsweise eines neuen Prothesenkniegelenksystems, Orthopädie Technik. 2015; 66 (9): 46–50
| Anwendergruppe/Aktivitätsmodus | A | B | C |
|---|---|---|---|
| Unterstütztes Aufstehen und Hinsetzen | ja | ja | ja |
| Standphasenwiderstand | gesperrt | gesperrt | hoch |
| Standphasenbeugung | - | begrenzt (Mode B+) | unbegrenzt |
| Schwungphase | - | ja | ja |
| Stolperschutz Plus | - | ja | ja |
| Intuitive Stehfunktion | - | - | ja |
| Rollstuhlfunktion | ja | ja | ja |


- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Kampas P, Bellmann M, Weigl-Pollack A. Das neue C‑Leg und seine erweiterten Funktionen. Orthopädie Technik, 2011; 62 (10): 722–727
- Kampas P, Seyr M. Technologie und Funktionsweise des Genium-Prothesenkniegelenks. Orthopädie Technik, 2011; 62 (12): 898–903
- Kannenberg A, Zacharias B, Pröbsting E. Benefits of microprocessor prosthetic knees to limited community ambulators: A systematic review. J Rehabil Res Dev, 2014; 51 (10): 1469–1496
- Hafner BJ, Smith DG. Differences in function and safety between Medicare Functional Classification Level‑2 and ‑3 transfemoral amputees and influence of prosthetic knee joint control. J Rehabil Res Dev, 2009; 46 (3): 417–434
- Thiele J, Westebbe B, Bellmann M, Kraft M. Designs and performance of microprocessorcontrolled knee joints. Biomed Tech, 2014; 59 (1): 65–77
- Kampas P, Seyr M. Technologie und Funktionsweise des Genium-Prothesenkniegelenks. Orthopädie Technik, 2011; 62 (12): 898–903
