OTWorld goes digital
Die OTWorld 2026 rückt Digitalisierung und KI in den Fokus: Kongress und Messe zeigen, wie 3D-Druck, Robotik und datenbasierte Prozesse die Hilfsmittelversorgung verändern.
WeiterlesenFachportal des Bundesinnungsverbandes für Orthopädie-Technik
Die OTWorld 2026 rückt Digitalisierung und KI in den Fokus: Kongress und Messe zeigen, wie 3D-Druck, Robotik und datenbasierte Prozesse die Hilfsmittelversorgung verändern.
WeiterlesenWie profitiert die Prothetik von Robotik und maschineller Intelligenz? Antworten darauf liefert Prof. Dr.-Ing. Sami
Haddadin, Inhaber des Lehrstuhls für Robotik und Systemintelligenz und Direktor des Munich Institute of Robotics and Machine Intelligence (MIRMI) an der Technischen Universität München, in seiner Keynote auf der OTWorld 2022. Im OT-Gespräch verrät er erste Details.
E. Jakubowitz, A. Kettenbach, B. Fleischer-Lück
Die Versorgung hand- und armamputierter Patienten kann trotz der allseits zu beobachtenden Entwicklungsfortschritte in der Handprothetik nur in sehr engen, technisch bedingten Grenzen stattfinden. Die jüngste Innovation der multiartikulierenden Handprothesen kann die motorischen Grundfunktionen der wichtigsten Alltagsaktivitäten anhand programmierter Greifmuster und Bewegungsabläufe zwar wiederherstellen – allerdings sind diese Hände je nach Anwender immer noch umständlich zu bedienen, weisen nicht nur wegen der Gestensteuerung eine zum Teil unnatürliche Kinematik auf und bieten kein sensorisches Feedback. So kommt es immer wieder vor, dass Patienten solche Hände ablehnen, weil sie die vermehrte Fingerbeweglichkeit nicht als den alles entscheidenden Mehrwert gegenüber dem recht steif erscheinenden Dreipunktgriff bisheriger Systemhände ansehen. Demgegenüber wird sowohl in Fachzeitschriften als auch in den Massenmedien immer wieder von bahnbrechenden Forschungs- und Entwicklungsschritten in der Handprothetik berichtet. Die Rede ist dann von „gedankengesteuerten“, „fühlenden“ oder sogar „intelligenten“ Arm- und Handprothesen, die aus der Robotik stammen, eine künstliche Haut besitzen oder gelegentlich geschickter als die menschliche Hand sein sollen. Doch sind die gemeldeten Errungenschaften tatsächlich so vielversprechend? Erfüllen sie wirklich die Erwartungen der Patienten an ihre Prothese? Eine nähere Beschäftigung mit diesen Forschungs- und Entwicklungsbemühungen und die Beantwortung der Frage, ob sie wirklich das Potenzial für eine verbesserte Prothesenversorgung aufweisen, würde hier für Aufklärung sorgen. Im Bestreben, diese Lücke zu schließen, werden im vorliegenden Artikel anhand aktueller Beispiele die drei Hauptforschungsfelder der Handprothetik – Steuerungssysteme, Feedbacksysteme und Robotik – skizziert.
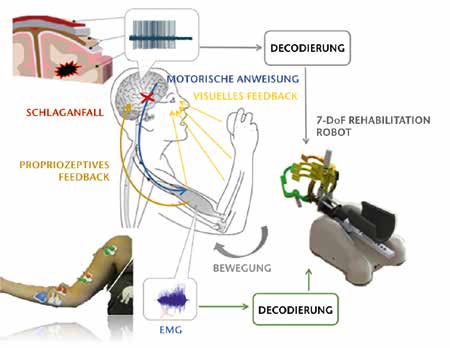
A. Ramos-Murguialday
Lähmungen nach einem Schlaganfall treten heutzutage häufig auf. Die Anzahl der Personen, die jedes Jahr einen Schlaganfall erleiden, steigt durch eine ungesunde Lebensführung dramatisch an (Stress, Ernährung, Tabak- und Alkoholkonsum usw.). Bei einer großen Zahl dieser Patienten sind Gehirnregionen betroffen, die die Steuerung von Bewegungen übernehmen. Viele dieser Patienten können daher mit den betroffenen Gelenken keine Bewegungen mehr ausführen. Für diese Gruppe besteht sechs bis acht Monate nach dem Schlaganfall im Allgemeinen keine Hoffnung auf Besserung mehr: Das Gehirn ist nicht mehr in der Lage, die Schädigung auszugleichen, denn neuroplastische Veränderungen, die die Regeneration unterstützen, können ohne Restbewegung der Muskeln nicht hervorgerufen und neue Nervenverbindungen nicht aufgebaut werden. Glücklicherweise liefert der wissenschaftliche Fortschritt neue Erkenntnisse und Technologien, die nicht nur dazu verwendet werden können, die Beschädigung zu umgehen und Bewegung zu unterstützen, sondern auch dazu, die beschädigten neuronalen Verbindungen zu rehabilitieren und Gehirn und Bewegung wieder zu verbinden. „Brain-Machine-Interfaces“ können zur Steuerung von Rehabilitationsrobotik verwendet werden. Diese neuartige Technologie schafft Hoffnung für gelähmte Schlaganfallpatienten.
U. Thiel
Als Ursache für eine dauerhafte körperliche Beeinträchtigung steht der Schlaganfall an erster Stelle. Die Behandlung der dadurch entstehenden chronischen Bewegungsstörungen verlangt nach einem interdisziplinären Ansatz. Nach dem Aufenthalt in der Rehabilitationsklinik wird diese Arbeit in der Langzeitrehabilitation zu einer zunehmend größeren Herausforderung. Die wissenschaftlichen Ergebnisse der Rehabilitationsforschung zeigen, dass die Therapieintensität einer der wichtigsten Faktoren für die Wiedererlangung motorischer Funktionen ist. In der vorliegenden Einzelfallschilderung wird aufgezeigt, inwiefern eine adäquate interdisziplinäre Zusammenarbeit unter Einsatz moderner Hilfsmittel – von dynamischen Orthesen über gerätegestützte Therapie bis hin zur Robotik – auch nach Jahren relevante Verbesserungen erzielen kann.