Einleitung
Durch die schnelle Fertigung beliebiger digitaler 3‑D-Geometrien und die immer weiter steigende Auswahl an Materialien bietet die additive Fertigung enorm viel Flexibilität. Das Fertigungsverfahren ist vor allem für die Entwicklung von Prototypen oder die Produktion individuell anzupassender Produkte attraktiv. In Kombination mit heutigen 3‑D-Scan-Systemen lässt sich die Anwendbarkeit dieses Verfahrens weiter ausbauen, zum Beispiel in Prozessen des Reverse Engineering. Diese Systemkombination macht das Verfahren auch für die Orthopädie-Technik attraktiv (Abb. 1).

Bei dem Vorhaben, eine Prothese additiv zu fertigen, wird man allerdings mit den enormen individuellen Ansprüchen der Orthopädie-Technik konfrontiert – von der Passform über den Prothesenaufbau bis hin zum Abrollverhalten der Prothese. Es sind oftmals nicht strikt definierte oder erfassbare Parameter, sondern Optimierungen bei der individuellen Anprobe mit Patienten. Alle Ansprüche müssen für die additive Fertigung in die digitale Ebene übernommen werden und über den Fertigungsprozess erhalten bleiben. Als Referenz kann eine vorhergehende Versorgung des Patienten dienen 1.
Das Abrollverhalten wird maßgeblich durch den Prothesenfuß beeinflusst. Um diverse Fußsysteme charakterisieren zu können, bietet sich das Rollover-Shape-(ROS-)Modell von Hansen an 2 3 4. Das Modell bietet eine einfache Anschauungsweise in die Funktionen des menschlichen Fußes; dabei wird der Fuß mit einem rollenden Rad verglichen, das mit einem bestimmten Radius um einen bestimmbaren Mittelpunkt abrollt. Im Prinzip handelt es sich dabei um die effektive Fußform während des Gangzyklus. Das Modell lässt sich nicht nur auf den physiologisch gesunden Fuß applizieren, sondern kann auch auf jegliches Prothesenfußsystem angewendet werden 5.
Dies führte zu der Idee, die in diesem Artikel vorgestellten drei Prothesenfußkonzepte nach dem ROS-Modell zu entwickeln. Damit soll die Anpassung des Fußmodells an jegliches Fußsystem gewährleistet werden 6. Dazu musste die ROS einer Referenzversorgung erfasst werden, um die Prothesenfußmodelle anzupassen. Während des Konstruktionsprozesses wurden die Konzepte in einer FEM-Simulation regelmäßig evaluiert, um zu prüfen, ob die erforderliche ROS mit den eingestellten Konstruktionsparametern erreicht wird. Hierbei wurden die Fersen- und Vorfußbelastungsfälle zu den jeweiligen Zeitpunkten der Bodenreaktionskraftspitzen während eines Gangzyklus simuliert.
Die finale Prothese wurde im Selektiven Lasersinterverfahren (SLS) aus Polyamid für einen transtibial amputierten Patienten gefertigt. In einer 2‑D-Ganganalyse wurden die ROS und weitere Gangparameter der Fußkonzepte und der Referenzprothese erfasst und miteinander verglichen.
Das Roll-over-Shape-Modell
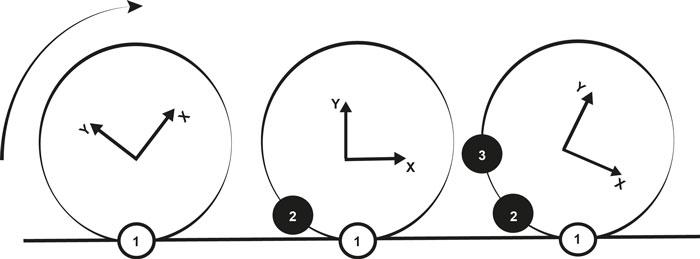
Das Modell stellt sich den menschlichen Fuß als rollendes Rad vor, das mit einem bestimmten Radius um den Mittelpunkt abrollt (Abb. 2) 7. Wie lässt sich dieses Modell nun auf die Fußkonstruktion übertragen? Da die ROS im Wesentlichen die effektive Fußform während des Gangzyklus beschreibt, lässt diese sich mit Hilfe des Druckmittelpunktverlaufes („Center of Pressure“ = COP) bestimmen. Da sich der COP immer auf Bodenebene befindet, beschreibt der Verlauf anfänglich eine Linie anstatt einer Kurve. Werden die COP in das Koordinatensystem des Sprunggelenkes transferiert, nimmt der Punkteverlauf nun die Form einer Kurve an.
Die Bestimmung der Orientierung des Koordinatensystems am Sprunggelenk kann unterschiedlich erfolgen. Das Modell von Hansen kann in drei Untermodelle differenziert werden:
- Fuß-ROS (F‑ROS)
- Knöchel-Fuß-ROS (AF-ROS)
- Knie-Knöchel-Fuß-ROS (KAF-ROS)
Die F‑ROS beschreibt lediglich die effektive Fußform beim Abrollvorgang, wohingegen AF-ROS und KAF-ROS die biomechanischen Einflüsse der jeweiligen Gelenke miteinbeziehen. Zur Bestimmung der F‑ROS wird die Position des Koordinatensystems am Knöchel angenommen und mit den Raumachsen zur Gangrichtung sowie parallel zum Boden ausgerichtet. Für AF- und KAF-ROS muss eine Rotationstransformation der Koordinaten erfolgen. Dazu wird das Koordinatensystem nach den Knöchel-Knie- oder den Knöchel-Hüfte-Vektoren ausgerichtet. Die COP, in das Zielkoordinatensystem transformiert, beschreibt nun eine Kurve. Um das Verhalten der Referenzprothese effektiv zu erfassen, wurde in den durchgeführten Messungen die AF-ROS bestimmt, da es sich beim Patienten um einen transtibial Amputierten handelte.
Konzepte
Die drei Konzepte für den Prothesenfuß wurden so entworfen, dass es möglich ist, durch Konstruktionsparameter die ROS des Prothesenfußes zu regulieren. Dies beinhaltet die Position des ROS-Mittelpunktes relativ zur Position des gedachten Knöchels und zum Radius der ROS.
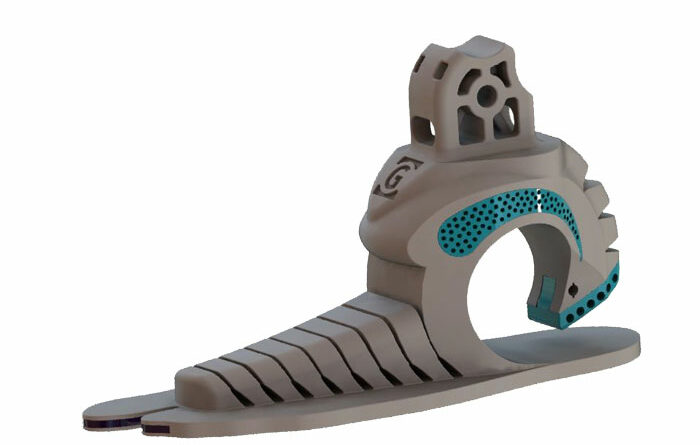
Konzept A realisiert dies mit einer radialen Schiene (Abb. 3a). Die Schiene lässt sich an jeden Radius anpassen und in der Ebene der Gangrichtung horizontal positionieren. Anschläge sorgen für einen Überstreckungsschutz der Fersen und der Vorfußhebel, die eine Dämpfung bei Fersenauftritt und beim Abrollvorgang über den Vorfuß erzeugen. Der Dämpfungsfaktor lässt sich mit der Stärke der Hebel und zusätzlichen Puffereinsätzen regulieren. Diese sind so zu wählen, dass die auftretende Biegung der Hebel bis zur ROS erfolgen kann. Durch eine Koppelung der beiden Federn wird eine Interaktion zwischen Vorfuß und Fersenfeder gewährleistet, was beispielsweise beim Fersenauftritt zu einer plantaren Fußbewegung führt.
Der Kontrollmechanismus für die ROS des Konzeptes B (Abb. 3b) lässt sich vereinfacht mit einem einseitig gespannten Balken erklären, der separat für die Fersen- und Vorfußbelastung beobachtet werden muss. Wird der Balken belastet, beschreibt er eine Krümmungskurve, die vom Flächenträgheitsmoment, von der verwendeten Struktur und von der anliegenden Kraft abhängig ist. Nach diesem Modell lassen sich ROS und Dämpfung durch die Veränderung der Stärke der Sohlenplatte kontrollieren. Zusätzlich kann ein Carbonelement in die Sohle eingeschoben werden, um die Steifigkeit zu erhöhen. Da sich die Kraft und der Hebelarm des Momentes entlang der Fußsohle ändern, muss bei einer konstanten Dicke der Platte darauf geachtet werden, dass diese so gewählt wird, dass die notwendige Verformung für die ROS zu jedem Punkt entlang der Fußlänge gewährleistet ist. Die endgültige Regulierung der ROS erfolgt letztlich über die Anschläge auf der Sohlenplatte, die eine Überstreckung verhindern.
Konzept C kann als Hybrid aus A und B bezeichnet werden (Abb. 3c). Die ROS wird durch Anschläge und eine Radialschiene reguliert. Durch Einschub einer Carbonplatte wird auch hier die Steifigkeit des Vorfuß- und des Fersenhebels reguliert. Mit der konvex gekrümmten Bodenplatte wird hier der maximal mögliche Vorfuß- und Fersenhebel benutzt, was die Verwendung stärkerer Carbonplatten ermöglicht, ohne dabei die ROS zu verfälschen, und was gleichzeitig die Energierückgewinnung erhöht. Ein Überstreckschutz im Mittelfuß verhindert hier eine starke Verformung in der mittleren Standphase und sorgt dafür, dass über die radiale Schiene abgerollt wird.
FEM-Simulation
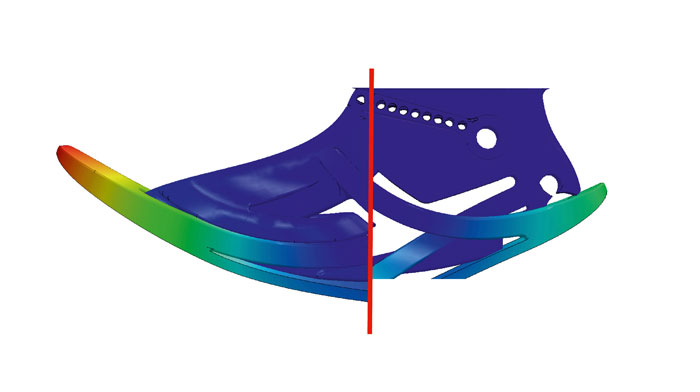
Um die Einstellungen der Konstruktionsparameter vor der Fertigung der Prothesenfüße evaluieren zu können, wurden mehrere Lastfälle zu unterschiedlichen Zeitpunkten des Gangzyklus simuliert. Die Lasten wurden der Bodenreaktionskraftmessung der Referenzprothese entnommen. Entsprachen die simulierten Verformungen der ROS, so wurden die Modelle zur Fertigung freigegeben. Abbildung 4 zeigt zur Veranschaulichung die Simulation von Konzept A, wobei die Belastungsfälle von Fersenauftritt und terminaler Standphase dargestellt werden.
Ergebnisse und Diskussion
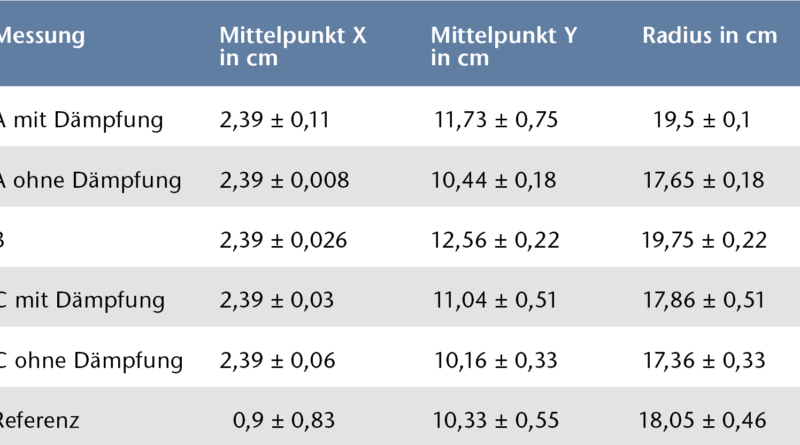
In Tabelle 1 werden die bestimmten ROS-Werte der Messungen aufgeführt. Die Messungen wurden mit jedem Konzept und der Referenzversorgung durchgeführt. Um den Einfluss der Dämpfung im ROS-Modell zu zeigen, erfolgten Messungen mit zusätzlicher Dämpfung. Bei A und B wurden hierzu TPU-Puffer verwendet, B und C wurden mit einer Carbonplatte verstärkt.
Weitgehend entsprachen die bestimmten ROS den Werten der Referenzmessung. Allerdings zeigten die Messungen bei allen Konzepten einen „X‑Shift“ im Vergleich zur Referenz. Dies resultiert aus der Platzierung des Sprunggelenkmarkers, da nicht die gleiche Position an den unterschiedlichen Füßen festgelegt werden konnte.
Lediglich Konzept B führte zu einem signifikant höheren Radius. Die Auswahl einer zu starken Carbonplatte führte dazu, dass die Anschläge nicht vollständig erreicht wurden und es somit zu einer Verfälschung der ROS kam.
Konzept A und C ohne Dämpfung erzielten im Vergleich zu B sehr gute Werte. Die zusätzliche Dämpfung in Konzept A führte zu einer signifikanten Erhöhung der ROS. Konzept C zeigte die beste Annäherung an die Referenzversorgung. Ohne zusätzliches Dämpfungselement erzielte das Konzept eine zu geringe ROS (siehe Tab. 1).
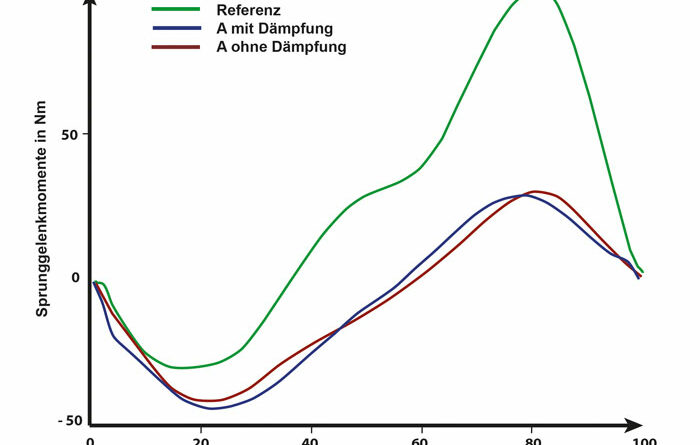
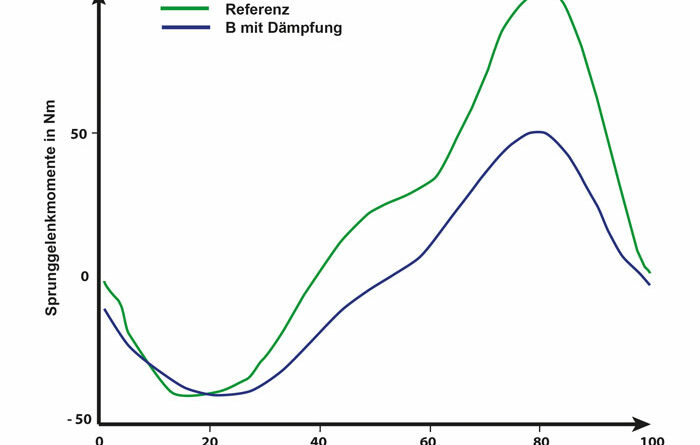
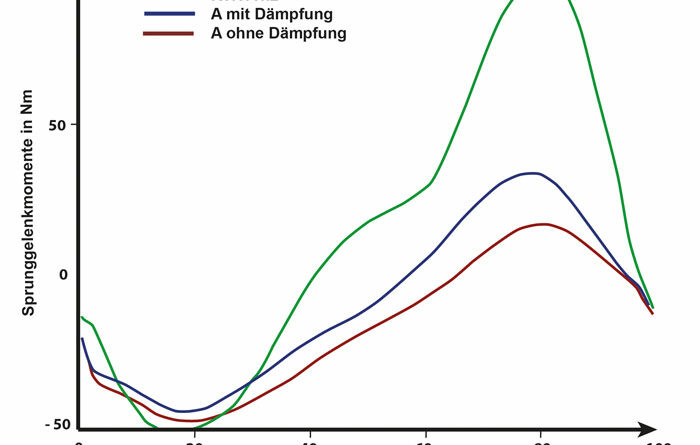
Neben den ROS-Parametern wurden zudem die Sprunggelenkmomente betrachtet (Abb. 5). Diese zeigen, dass die Fersendämpfung in Bezug auf die Referenzversorgung am besten mit den Konzepten B und C erreicht wurde. Im Falle des Vorfußes führten allerdings die Konzepte zu wesentlich kleineren Momenten als die Referenz. Die Verwendung von Carbon-Einschüben bei Konzept B und C konnte dies etwas verbessern (Abb. 5a u. b). Eine übermäßige Verstärkung der Dämpfungselemente wiederum kann die ROS negativ beeinflussen. Konfrontiert mit diesem Problem wird deutlich, dass die alleinige Betrachtung der ROS nicht ausreicht, um alle essentiellen Fußparameter zu erfassen.
Fazit
Insgesamt scheint das ROS-Modell allein zur Entwicklung von Prothesenfüßen nicht ausreichend zu sein. Durch zusätzliche Betrachtung der Sprunggelenkmomente beispielsweise lässt sich dieses Defizit kompensieren. Optimalerweise sollte die Dämpfung so gewählt werden, dass genug Widerstand erzeugt wird und dass gleichzeitig die effektive Fußform konsistent mit der ROS ist.
Im Vergleich zu den gängigen Carbonfeder-Prothesenfüßen stellen diese Konzepte keine alltägliche Alternative dar, was sich vor allem anhand der geringeren Energierückgewinnung während der terminalen Standphase verdeutlicht. Dennoch konnten die Konzepte vor allem durch das Abrollverhalten überzeugen, das auch vom Probanden als angenehm empfunden wurde. Sicher ist, dass der weitere technologische Fortschritt der additiven Fertigung die Herstellung qualitativ hochwertiger Prothesen mit dem additiven Verfahren gewährleistet.
Für die Autoren:
Hannes Schmück
M. Sc. Gesundheits- und Rehabilitationstechnik
Gottinger Handelshaus OHG
Ilchinger Weg 1
85604 Zorneding
hannes.schmueck@gottinger.de
Begutachteter Beitrag/reviewed paper
Schmück H, Pröbsting J, Günther N, Vonderthan F. Prothesenfüße für die additive Fertigung nach dem Roll-over-Shape-Modell. Orthopädie Technik, 2017; 68 (3): 34–37



- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Pröbsting J. Generative Ferti- gungsverfahren in der OrthopädieTechnik. Orthopädie Technik, 2014; 65 (1): 16–19
- Hansen AH, Childress DS, Knox EH. Roll-over shapes of human locomotor systems: effects of walking speed. Clinical Biomechanics (Bristol, Avon), 2004; 19 (4): 407–414
- Hansen AH, Childress DS. Investigations of roll-over shape: implications for design, alignment and evaluation of ankle-foot prostheses and orthoses. Disability and Rehabilitation, 2010; 32 (26): 2201–2209
- Hansen AH, Sam M, Childress DS. The effective foot length ratio: a potential tool for characterization and evaluation of prosthetic feet. Journal of Prosthetics and Orthotics, 2004; 16 (2): 41–45
- Hansen AH, Childress DS, Knox EH. Roll-over shapes of human locomotor systems: effects of walking speed. Clinical Biomechanics (Bristol, Avon), 2004; 19 (4): 407–414
- Schmück H. Prothesenfuß nach dem Roll-over Shape Modell – Konzepte zur Herstellung mit dem Addi- tiven Verfahren. Saarbrücken: Akademiker-Verlag, 2016: 74–76
- Hansen AH, Childress DS. Investigations of roll-over shape: implications for design, alignment and evaluation of ankle-foot prostheses and orthoses. Disability and Rehabilitation, 2010; 32 (26): 2201–2209
