Einleitung
Für ein physiologisches Gangbild ist die Lastaufnahme über die gesamte Länge des Fußes nötig. Hierzu muss der Fuß oder der Fußersatz funktionelle Hebel zur Verfügung stellen, um die Drehmomente aufzunehmen, die während des Gehens auftreten 1 2. Werden nun durch eine Teil-Fußamputation Teile dieses Hebels entfernt, reduziert sich die Unterstützungsfläche unterhalb des Fußes und damit auch die Hebelverhältnisse selbst 3.
Einen speziellen Fall der Teil-Fußamputation stellt die Exartikulationin der Chopart’schen Gelenklinie dar. Diese sogenannte Chopart-Amputation zählt zur ersten Amputationslinie im Rückfuß, was mit einem kompletten Verlust des Vorfußes einhergeht 4. Die dadurch gleichermaßen entstandene Reduktion der Unterstützungsfläche führt in der Konsequenz biomechanisch betrachtet zu einem vollständigen Verlust des Vorfußhebels 5. Damit verbunden ist ein Verlust an physiologischen Strukturen, die in der Lage sind, die aufgebrachten Lasten aufzunehmen 6 und aktiv eine physiologische Abstoßwirkung zu erzielen. Zwar können Betroffene mit einer Chopart-Amputation durch den Erhalt der Ferse und der Beinlänge kurze Strecken ohne Hilfsmittel zurücklegen 7. Um jedoch in verschiedenen Alltagsumgebungen eine adäquate Mobilität und Belastbarkeit zu erreichen, sind prothetische Versorgungen nötig, um den Verlust des verlorengegangenen Hebels zu kompensieren.
Aktuell werden drei verschiedene Arten von Chopart-Prothesen untersucht: Man unterscheidet sprunggelenkfreie Versorgungen (z. B. Bellmann-Vorfußprothese) sowie unterschenkelhohe Versorgungen mit ventraler Anlage (z. B. Rahmenschaftprothese); zudem hat sich in den letzten Jahren eine modulare Versorgung aus Bellmann-Vorfußprothese und individuell angefertigter Unterschenkelorthese etabliert 8. Die aktuelle klinische Entscheidungsfindung, welcher Versorgungstyp eingesetzt werden soll, hängt von verschiedenen Faktoren ab:
- von den physischen Gegebenheiten des Anwenders,
- von der Restbeweglichkeit des OSG,
- von den Stumpfverhältnissen in Bezug auf die Weichteildeckung, aber auch
- von den kosmetischen Ansprüchen sowie den Aktivitätsansprüchen des Anwenders.
Rahmenschaftprothesen und ihre Derivate werden sowohl bei hoch aktiven Patienten unabhängig von der Restbeweglichkeit als auch bei Patienten genutzt, die keine Restbeweglichkeit, Fehlstellungen oder keine volle Endbelastbarkeit des Stumpfes aufweisen 9. Patienten mit voll beweglichem OSG und geringer Aktivität sowie hohem kosmetischem Anspruch werden hingegen in der Regel mit Bellmann-Vorfußprothesen und ihren Variationen einer OSG-freien Prothese versorgt. Bei höherer Beanspruchung der Prothese, d. h. höherer zu erwartender Belastung durch längere Geh- oder Standphasen, kann diesen Versorgungen modular eine Unterschenkelorthese hinzugefügt werden 10.
Biomechanische Analysen über die Effekte durch Verlust bzw. prothetische Wiederherstellung des Vorfußhebels durch Chopart-Prothesen sind nur spärlich vorhanden. Die aktuelle Studienlage impliziert, dass eine Rahmenschaftprothese durch ihre ventrale Anlage den Vorfußhebel im Vergleich zu nicht das OSG übergreifenden Versorgungen funktionell betrachtet besser ersetzen kann, der physiologischen Fußfunktion jedoch deutlich unterliegt 11 12. Eine gezielte Untersuchung aller möglichen Versorgungsformen (Bellmann-Vorfußprothese, Bellmann inkl. Unterschenkelorthese und Rahmenschaftprothese) untereinander ist den Autoren bislang nicht bekannt. Diese Fallstudie befasst sich mit einem Probanden nach Chopart-Amputation, der sowohl mit einer Rahmenschaftprothese (derzeit seine Alltagsprothese) als auch mit einer Bellmann-Vorfußprothese (seine wasserfeste Gehhilfe) versorgt ist. Zusätzlich erhielt er eine Adaptation (Toe-off, Allard, USA) zur modularen Modifizierbarkeit seiner Bellmann-Vorfußprothese. Der Proband kann beide Prothesen aufgrund guter Stumpfverhältnisse und ausreichender Beweglichkeit im OSG uneingeschränkt nutzen. Er sollte beim Gehen in der Ebene mit allen drei gängigen Versorgungskonzepten untersucht werden. Das spezielle Augenmerk dieser Untersuchung richtete sich auf den erzeugten Vorfußhebel und die damit verbundenen Einflüsse auf die proximale Gelenkkette der betroffenen Seite.
Methoden
Ein Proband (48 Jahre, 179 cm, 92 kg) mit einer traumatisch bedingten Rückfußamputation in der Chopart’schen Gelenklinie mit hoher Aktivität (Mob. 3 13) und dementsprechend hohen Anforderungen an die Prothese, einem voll endbelastbaren Stumpf und einem OSG-Bewegungsausmaß von dorsal/plantar 5°/0°/15° wurde mit drei unterschiedlichen Chopart-Prothesen untersucht. Der Proband war versorgt mit einer Bellmann-Vorfußprothese (gefertigt analog nach Bellmann 14 mit einer 45°-Carbonplatte, Abrollkante 2 cm distaldes Stumpfendes, Schichtaufbau des Vorfußes mit Pedilen, jedoch mit einem Silikon-Innenschaft anstatt Thermo plast) als wasserfester Gehhilfe sowie mit einer Rahmenschaftprothese (Chopartplatte Össur, Kategorie 4) als Alltagsversorgung. Beide Versorgungen waren individuell an ihn angepasst. Zusätzlich zur Bellmann-Vorfußprothese wurde der Proband im Rahmen der biomechanischen Untersuchungen testweise mit einer Unterschenkel-Adaptation in Form einer Toe-off-Unterschenkel-Carbonorthese (Allard, USA) ausgestattet (Abb. 1). Der statische Aufbau wurde mittels L.A.S.A.R. Posture (Ottobock, Deutschland) überprüft. Wie von Blumentritt empfohlen 15, befand sich die Lastlinie in allen Versorgungen zwischen 10 und 30 mm anterior des Kniegelenkzentrums in der Sagittalebene (Abb. 1).
Der Proband durchlief mit allen drei prothetischen Versorgungen eine standardisierte instrumentierte 3D-Ganganalyse in der Ebene inklusive Pedobarographie und bei unterschenkelhohen Versorgungen zusätzlich mit einer Schaftdruck-Messung im Bereich der ventralen Anlage. Die 3D-Ganganalyse erfolgte mittels eines optoelektronischen Bewegungsanalysesystems (Vicon, Großbritannien). Die Berechnung der Kinematik (Gelenkwinkel) und der Kinetik (Gelenkmomente) erfolgte mittels des biomechanischen Plug-in-Gait-Modells 16 (Vicon). Die benötigten Bodenreaktionskräfte zur Berechnung der Kinetik wurden mittels zweier Kraftmessplatten (AMTI, USA) erfasst. Fuß- und Schaftdruck wurden mit dem portablen Druckmesssystem „Pliance“ (Novel, Deutschland) gemessen. Die Druckmesssohlen wurden zwischen Versorgung und Schuh eingelegt. Der Schaftdrucksensor (15 × 6 cm) wurde mittig entlang der Schienbeinkante zwischen Tuberositas und Malleolengabel am Unterschenkel angebracht. Der gemessene Druck (p = F * A; F = A / p) wurde über die bekannte Fläche der Sensoren in die orthogonal zur Sensoroberfläche wirkende Kraft (N/kg) umgerechnet, die ein Maß für die Belastung im Bereich der ventralen Anlage darstellt.
In dieser Studie wurden die sagittalen Gelenkwinkelverläufe (Kinematik) und die erzeugten Drehmomente (Kinetik) für das Sprung‑, Knie- und Hüftgelenk der betroffenen Seite mit den drei unterschiedlichen Versorgungen betrachtet. Zusätzlich wurden die oben erwähnte Belastung und der Belastungsverlauf sowohl am Schienbein (mittels Schaftsensor unter der ventralen Anlage) als auch im Vor- und Rückfuß (über die Druckmesssohlen) untersucht. Zur Analyse wurde der Mittelwert aus mindestens zehn Gehdurchgängen pro Versorgung herangezogen. Die Positionen der Marker und des Schaftdruck-Sensors veränderten sich nicht, da alle drei Versorgungen während eines Messtermins hintereinander gemessen wurden. Um Rückschlüsse auf den Vorfußhebel ziehen zu können, wurde insbesondere die terminale Standphase (30–50 % Gangzyklus) betrachtet. Hier wurden die Maximalwerte von Kinematik, Kinetik und Lastverteilung berechnet und verglichen. Zusätzlich dazu wurde das gemessene Bewegungsausmaß des OSG über die gesamte Standphase betrachtet.
Ergebnisse
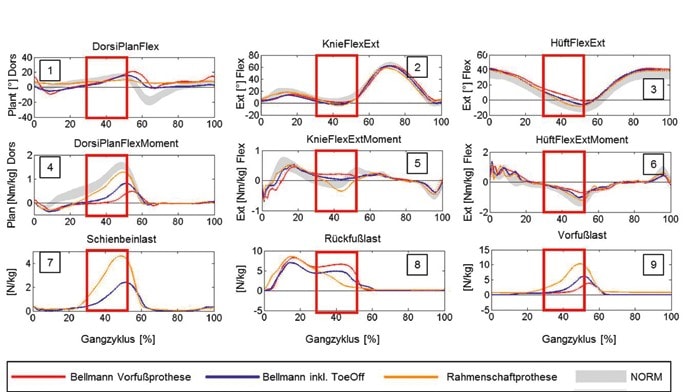
Beim Gehen in der Ebene zeigten sich Unterschiede zwischen den drei gemessenen Versorgungen in der terminalen Standphase (Abb. 2) (Tab. 1). Das Bewegungsausmaß ist demnach mit der Bellmann-Vorfußprothese am höchsten, gefolgt von der Kombination aus Bellmann und Toe-off-Orthese (Allard, USA) bis hin zum niedrigsten Wert in der Rahmenschaftprothese (Abb. 2a). Die beiden Versorgungen mit ventraler Anlage zeigen deutlich höhere extern dorsalflektierende Drehmomente (Abb. 2d). Die Schienbeinlast steigt ab ca. 20 % des Gangzyklus für beide Versorgungen mit ventraler Anlage an (Abb. 2g), was mit der Drehmomentkurve einhergeht. Die Rahmenschaftprothese zeigt das höchste extern dorsalflektierende Moment im OSG, die geringste Rückfußlast, aber die höchste Vorfußlast im Vergleich zu den anderen Versorgungsvarianten. Die Bellmann-Vorfußprothese inkl. Toe-off (Allard, USA) zeigt ein höheres externes dorsalflektierendes Drehmoment im OSG, eine geringere Rückfußlast sowie eine höhere Vorfußlast im Vergleich zur reinen Bellmann-Vorfußprothese. Sowohl das geringste externe dorsalflektierende Drehmoment als auch die niedrigste Vorfußlast zeigte sich bei der Bellmann-Vorfußprothese, hingegen aber die höchste Rückfußlast (Abb. 2 d, h, i).
Die unterschiedlichen Bewegungsausmaße, Drehmomente und Lastverteilungen der verschiedenen Versorgungen weisen weiter proximal zusätzliche Unterschiede auf. Im Kniegelenk zeigte sich in beiden Versorgungen mit ventraler Anlage die Tendenz zur Hyperextension im Knie (Abb. 2b). Mit Bellmann-Vorfußprothese hingegen zeigte sich ein Streckdefizit im Hüftgelenk (Abb. 2c).
Die gemessenen Drehmomente in Knie- und Hüftgelenk zeigen in beiden Versorgungen mit ventraler Anlage deutlich physiologischere Verläufe, wobei die Rahmenschaftprothese deutlich höhere extern extendierende Momente in Knie- und Hüftgelenk aufweist als die Bellmann-Vorfußprothese inklusive Toe-off-Orthese. Die Bellmann-Vorfußprothese alleine hingegen zeigte sowohl für das Knie- als auch für das Hüftgelenk deutlich niedrigere Gelenkdrehmomente im Vergleich zur Norm. Speziell im Kniegelenk zeigte die Bellmann-Vorfußprothese ein extern flektierendes Moment anstatt eines zu diesem Zeitpunkt der Standphase üblichen extern extendierenden Momentes (Abb. 2e u. f) (Tab. 1).
Diskussion
Ziel dieser Fallstudie war es zu ermitteln, welche der aktuell gängigen Chopart-Prothesen es ermöglicht, den verlorenen Vorfußhebel in seiner Funktionmöglichst adäquat wiederherzustellen. Es zeigte sich ein Vorteil der unterschenkellangen Versorgungen im Vergleich zur OSG-freien Prothese. Der effektivste Vorfußhebel wurde durch die Rahmenschaftprothese und dabei am ehesten durch ihre rigide Konstruktion erzeugt 17. Die OSG-Bewegung wird in der Rahmenschaftprothese durch die Deformation einer Carbon-Fußplatte (hier eine sogenannte Chopart-Platte, Fa. Össur) übernommen, da das OSG des Anwenders fest in die Rahmenschaftkonstruktion eingebettet und dadurch quasi versteift ist, was auch unmittelbar einen potenziellen Nachteil dieser Technik markiert. Durch die Limitierung des Bewegungsausmaßes und die relativ hohe Steifigkeit der Carbonplatte konnte mittels der ventralen Anlage und des sich nur gering verformenden Vorfußes ein höheres externes Drehmoment im OSG als in den anderen beiden getesteten Versorgungen aufgenommen werden, was für sich betrachtet einen positiven Effekt auf die Gelenke der proximalen Kette hatte. Jedoch zeigte sich in der Rahmenschaftprothese die Tendenz zur Hyperextension im Kniegelenk, vermutlich wiederum bedingt durch die limitierte Deformation der Carbonplatte in Richtung Dorsalflexion. Dies zeigt auf, dass gerade hier der Aufbau, aber auch die Auswahl der Fußsteifigkeiten eines besonderen Augenmerks bedarf, um extendierende Momente auf das Kniegelenk besser zu kontrollieren.
Die Fähigkeit, die Restbeweglichkeit im OSG mit einer ventralen Anlage in Verbindung mit der Bellmann-Vorfußprothese inkl. Toe-off-Orthese zu nutzen, zeigte vergleichsweise geringere Drehmomente im OSG als in der Rahmenschaftprothese, dennoch zeigten sich während der terminalen Standphase normgerechte externe knie- und hüftextendierende Drehmomentverläufe. Der geringe Widerstand der ventralen Anlage der Toe-off-Orthese ermöglichte es, die Last teilweise in den Vorfuß zu verlagern, jedoch blieb die Hauptlast weitestgehend im Rückfuß. Die hier genutzte handelsübliche Toe-off-Orthese war in ihrer Form und Steifigkeit nicht individuell auf den Probanden abgestimmt und – vermutlich aufgrund ihrer Konstruktionsmerkmale – nicht steif genug, um höhere externe Momente abzufangen. Eine individuell gefertigte entsprechende Unterschenkel-Carbonorthese, bei der die Steifigkeit der ventralen Anlage im Sinne einer federnden Wirkung angepasst werden kann, könnte zu einer besseren Lastverteilung führen und so den Kompromiss zwischen Beweglichkeit und Steifigkeit besser abbilden.
Dennoch zeigte selbst die Kombination aus Bellmann-Vorfußprothese inkl. Toe-off deutliche Vorteile gegenüber der reinen Bellmann-Vorfußprothese: In der Bellmann-Vorfußprothese befand sich die Last durchweg im Rückfuß, was direkte Auswirkungen auf das OSG-Moment hatte und sich weiterführend in die proximale Kette fortpflanzte. Ohne ventrale Anlage konnte kaum ein effektiver Vorfußhebel hergestellt werden, was sich direkt negativ in reduzierten Drehmomenten in Knie- und Hüftgelenk auswirkte und damit den Anspruch an eine aktive Stabilisierung des Patienten erhöht. Gleichzeitig bietet die Bellmann-Vorfußprothese jedoch für sich betrachtet einen hohen Alltagswert im Hinblick auf eher moderate Belastungssituationen, wenn der biomechanische Anspruch an die Umsetzung von hohen Drehmomenten situativ etwas in den Hintergrund rückt und die OSG-Beweglichkeit führend wird.
Schlussfolgerungen
Der modulare Ansatz mit einer individuell gefertigten Unterschenkel-Carbonorthese scheint für den getesteten Probanden eine sinnvolle Alternative für den Alltag darzustellen. Die Möglichkeit, in Kombination mit einer ventralen Anlage die Restbeweglichkeit im OSG zu nutzen, hat positive Auswirkungen auf den Vorfußhebel und die proximale Gelenkkette. Der Vorfußhebel ist mit der kombinierten knöchelfreien Prothese zwar nicht so gut wiederhergestellt wie bei einer Rahmenschaftprothese, aber das kann auf die geringe Steifigkeit der Toe-off-Orthese zurückgeführt werden. Die Rahmenschaftprothese ermöglicht unumstritten zwar den besten Vorfußhebel, aber im Alltag verändern sich die Anforderungen situativ stetig. Eine entsprechend situationsbedingte Anpassung an die Alltagsaktivität ist erst mit einer modularen Versorgung möglich.
Die Ergebnisse dieser Studie beziehen sich auf einen exemplarischen Einzelfall innerhalb einer aktuell durchgeführten Kohortenstudie. Zumindest für diesen speziellen Einzelfall sollte aufgrund der vorhandenen OSG-Beweglichkeit eine modulare Versorgung in Betracht gezogen werden.
Für die Autoren:
Thomas Kaib M. Sc.
Klinik für Orthopädie und Unfallchirurgie
Zentrum für Orthopädie, Unfallchirurgie und Paraplegiologie, Universitätsklinikum Heidelberg
Schlierbacher Landstr. 200a
69118 Heidelberg
Thomas.Kaib@med.uni-heidelberg.de
Begutachteter Beitrag/reviewed paper
Kaib T, Block J, Heitzmann D W W, Putz C, Wolf S I, Alimusaj M. Fallstudie zum Einfluss verschiedener Chopart-Prothesen auf das Gangbild des Anwenders. Orthopädie Technik, 2018; 69 (11): 18–22
| Maximalwerte Kinematik & Kinetik | |||||
|---|---|---|---|---|---|
| Gelenk | Zeitreihe sagittal | Bellmann-Vorfußprothese | Bellmann-Vorfußprothese + Toe-off-Orthese | Rahmenschaftprothese | Norm |
| Hüfte | [°] 1 [Nm/kg]2 | 2.1±0.1 0.74± 0.07 | 6.0±0.1 1.03±0.03 | 8.5±0.2 1.22±0.03 | 10.8±0.8 1.37±0.25 |
| Knie | [°] 1 [Nm/kg]2 | 1.1±0.1 0.26 ± 0.01 | 2.5 ± 0.1 0.02 ± 0.01 | 4.6±0.1 ‑0.36±0.01 | 2.6±1.3 ‑0.16±0.05 |
| OSG | [°]1 ROM [°]3 [Nm/kg]2 | 21.1±0.1 30.5±0.1 0.49±0.01 | 15.9±0.1 21.4±0.1 0.81±0.01 | 10.0±0.1 5.4±0.1 1.28±0.01 | 15.6±1.1 33.0±1.3 1.57±0.05 |
| Maximalwerte Schaft- und Fußdrucksensoren |
|||||
| Schienbeinlast [N/kg] | n/a | 2.41±0.01 | 4.63±0.02 | n/a | |
| Rückfußlast [N/kg] | 5.52±0.02 | 3.27±0.01 | 0.79±0.02 | n/a | |
| Vorfußlast [N/kg] | 4.03±0.01 | 6.17±0.01 | 10.37±0.05 | n/a | |

- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Kirtley C. Clinical gait analysis: theory and practice. Edinburgh: Elsevier, Churchill Livingstone, 2006: 316
- Perry J, Burnfield JM. Gait analysis: normal and pathological function. 1st edition. Thorofare, NJ: Slack Incorporated, 1992
- Greitemann B, Brückner L, Schäfer M, Baumgartner R. Amputation und Prothesenversorgung. 4., vollständig überarbeitete Auflage. Stuttgart, New York: Thieme Verlag, 2016
- Bowker J. Partial Foot Amputations and Disarticulations: Surgical Aspects. Journal of Prosthetics and Orthotics, 2007; 19 (8): 62–76
- Greitemann B, Brückner L, Schäfer M, Baumgartner R. Amputation und Prothesenversorgung. 4., vollständig überarbeitete Auflage. Stuttgart, New York: Thieme Verlag, 2016
- Dillon MP, Fatone S, Hodge MC. Biomechanics of ambulation after partial foot amputation: A systematic literature review. Journal of Prosthetics and Orthotics, 2007; 19 (8): 2–35
- Greitemann B, Brückner L, Schäfer M, Baumgartner R. Amputation und Prothesenversorgung. 4., vollständig überarbeitete Auflage. Stuttgart, New York: Thieme Verlag, 2016
- Greitemann B, Brückner L, Schäfer M, Baumgartner R. Amputation und Prothesenversorgung. 4., vollständig überarbeitete Auflage. Stuttgart, New York: Thieme Verlag, 2016
- Greitemann B, Brückner L, Schäfer M, Baumgartner R. Amputation und Prothesenversorgung. 4., vollständig überarbeitete Auflage. Stuttgart, New York: Thieme Verlag, 2016
- Greitemann B, Brückner L, Schäfer M, Baumgartner R. Amputation und Prothesenversorgung. 4., vollständig überarbeitete Auflage. Stuttgart, New York: Thieme Verlag, 2016
- Dillon M, Hansen AH, Fatone S. Influence of marker models on ankle kinematics in persons with partial foot amputation: An investigation using a mechanical model. Journal of Rehabilitation Research and Development, 2008; 45 (4): 567–576
- Dillon MP , Barker TM. Can partial foot prostheses effectively restore foot length? Prosthetics and Orthotics International, 2006; 30: 17–23
- Gailey RS et al. The Amputee Mobility Predictor: An instrument to assess determinants of the lower-limb amputee’s ability to ambulate. Archives of Physical Medicine and Rehabilitation, 2002; 83 (5): 613–627
- Bellmann B. Vorfußprothese nach Bellmann. In: Baumgartner R, Botta P. Amputation und Prothesenversorgung. 3. Auflage. Stuttgart, New York: Thieme Verlag, 2007: 293–297
- Blumentritt S. A new biomechanical method for determination of static prosthetic alignment. Prosthetics and O rthotics international, 1997; 21 (2): 107–113
- Kadaba MP et al. Measurement of lower extremity kinematics during level walking. Journal of Orthopaedic Research, 1990; 8: 383–392
- Dillon MP , Barker TM. Can partial foot prostheses effectively restore foot length? Prosthetics and Orthotics International, 2006; 30: 17–23
