Dies erlaubt es Anwendern myoelektrischer Handprothesen, zwei Freiheitsgrade gleichzeitig proportional zu steuern. Die Steuerung schnitt nicht nur im standardisierten Clothespin-Relocation-Test deutlich besser ab als die zwei erwähnten konventionellen Steuerungen, sondern auch ihre Zuverlässigkeit blieb selbst bei einem Wechsel der Armposition unbeeinflusst und über mehrere Tage stabil.

Einleitung
Elektromyographische bzw. EMG-Signale sind kleine elektrische Spannungen, die Muskeln bei Kontraktionen generieren. Da die Amplitude dieser Signale monoton mit der Kontraktionsstärke des Muskels zunimmt, können sie zur willentlichen Steuerung elektrisch angetriebener Handprothesen verwendet werden. Die ersten Forschungsansätze hierzu gab es bereits in den vierziger Jahren des letzten Jahrhunderts 1; die ersten Produkte aus der damaligen Sowjetunion waren seit den Sechzigern kommerziell erhältlich 2.
Die meisten Menschen behalten bei einer Handamputation eine Wahrnehmung für ihre amputierten Gliedmaßen, da die sensorischen und motorischen Bereiche, die die Hand im Gehirn repräsentieren, nach der Amputation weitestgehend erhalten bleiben. Die sogenannte Phantomhand kann in der Wahrnehmung des Amputierten bewegt werden, was Kontraktionen der Restmuskulatur im Armstumpf auslöst 3. Die mit diesen Phantombewegungen einhergehenden EMG-Signale können zur Steuerung einer Prothese genutzt werden. Aber selbst Personen ohne Phantomhand (z. B. bei einer angeborenen Fehlbildung) sind zumeist in der Lage, verschiedene Muskeln im Stumpfbereich willentlich zu kontrahieren.
Verschiedentliche technische Fortschritte haben in den letzten Jahren zu einer Vielzahl neuartiger multifunktionaler Handprothesen geführt. Mindestens vier Hersteller bieten bereits Prothesen mit sechs bis elf elektrisch angetriebenen Freiheitsgraden an 4. In Forschungsprojekten wurden sogar bereits Prototypen mit bis zu 20 Freiheitsgraden vorgestellt. Allerdings existiert bis heute kein Steuerungsverfahren, mit dem eine so hohe Anzahl von Freiheitsgraden zuverlässig und robust angesteuert werden kann.
Die in der Prothetik verwendeten bipolaren Elektrodenmodule verfügen bereits über eine integrierte Verstärkung, Filterung, Gleichrichtung und Glättung der EMG-Rohsignale und liefern somit deren Amplitude als analoges Ausgangssignal. Die in diesem Artikel vorgestellten Steuerungen arbeiten mit diesem EMG-Aktivitätssignal. Alle Prothesenhersteller verwenden Steuerungsverfahren, die auf den in den Anfängen der Myoprothetik entwickelten Verfahren basieren und mit denen sich die Funktionen der Prothese nur einzeln ansteuern lassen. Dabei werden zwei bipolare Elektroden über antagonistischen Muskeln im Prothesenschaft positioniert und zur Steuerung der Greiffunktion der Prothese verwendet. Die EMG-Aktivität der Handgelenksflexoren schließt die Prothese, die Aktivität der Extensoren öffnet sie. Die Geschwindigkeit bzw. die Greifkraft können dabei proportional zur Stärke der EMG-Aktivität gesteuert werden.
Um mit diesen zwei Elektroden mehrere Freiheitsgrade wie etwa eine zusätzliche Rotation steuern zu können, werden Heuristiken zur Auswahl des jeweiligen Freiheitsgrades verwendet. Bei den am häufigsten verwendeten Methoden erfolgt die Auswahl über eine Co-Kontraktion oder über die Geschwindigkeit, mit der die Kontraktion aufgebaut wird 5. Da die Funktionen immer nur einzeln gesteuert werden können und eine kurze Pause beim Wechsel der Funktion notwendig ist, müssen komplexere Bewegungen in mehrere Teilbewegungen zerlegt werden, die sequenziell ausgeführt werden müssen. Dies a. macht die Benutzung langsam, verhindert einen flüssigen Bewegungsablauf und beschränkt den Nutzen weiterer verfügbarer Freiheitsgrade.
Da die meisten Personen mit Amputation oder angeborener Fehlbildung nicht genügend EMG-Signale unabhängig voneinander kontrollieren können, ist eine direkte Steuerung mehrerer Freiheitsgrade nicht möglich (pro Freiheitsgrad wären zwei unabhängige Signale notwendig). Daher wurde in diversen Forschungsansätzen versucht, eine höhere Anzahl von Kontraktionsarten mit Hilfe von Mustererkennungsverfahren zu unterscheiden 6. Dabei analysiert ein Computeralgorithmus („Klassifikator“) bestimmte Merkmale, die aus mehreren EMG-Rohsignalen extrahiert werden, und vergleicht diese mit mehreren zuvor von der jeweiligen Person b. aufgenommenen Mustern. Der Klassifikator entscheidet sich für das ähnlichste Muster, das dann in eine Prothesenbewegung umgesetzt werden kann.
Trotz vier Jahrzehnten Forschung an diesen Methoden und vielversprechenden Resultaten 7 8 wird eine solche Steuerung bisher von keinem der Prothesenhersteller angeboten. Lediglich eine kleine Ausgründung aus einem Forschungsinstitut in den USA bietet eine Steuereinheit für Prothesen basierend auf solchen multivariaten Klassifikationsmethoden an 9. Als Gründe für den geringen Transfer der Forschungsergebnisse in kommerzielle Produkte sind vor allem Probleme mit der Zuverlässigkeit zu nennen 10. Sobald sich die Signalmuster ändern 11, z. B. bei veränderter Armposition 12, durch leichtes Verrutschen der Elektroden 13 oder durch Änderung der elektrischen Hauteigenschaften, kann es zu Fehlinterpretationen durch den Algorithmus kommen, die zu ungewollten Bewegungen führen.
Seit einigen Jahren wird zudem an Verfahren geforscht, die eine simultane Steuerung mehrerer Freiheitsgrade erlauben 14. Dabei ist insbesondere der Regressionsansatz hervorzuheben. Im Gegensatz zu einem Klassifikator entscheidet ein Regressor nicht für eine bestimmte Klasse, sondern schätzt einen kontinuierlichen, unabhängigen Aktivitätswert für jeden Freiheitsgrad. Dies erlaubt eine gleichzeitige Nutzung mehrerer Freiheitsgrade mit unabhängiger Proportionalsteuerung.
In dieser Arbeit wird eine Steuereinheit für eine Handprothese mit zwei Freiheitsgraden vorgestellt, die auf einem linearen Regressionsverfahren basiert. Da die Zuverlässigkeit essentiell für eine erfolgreiche Anwendung ist, wird die Steuerung an einem Probanden mit transradialer Amputation in einem möglichst praxisnahen Szenario evaluiert, das eine Benutzung an zwei verschiedenen Tagen und eine Variation der Armposition beinhaltet.
Methoden
Konventionelle Steuerungen
Im Gegensatz zu der in diesem Artikel vorgestellten Simultansteuerung benutzen die meisten Anwender, die eine Prothese mit zwei Freiheitsgraden (in der Regel „Hand öffnen/schließen“ und „Rotation“) besitzen, einfache Steuerungen, die mit nur zwei Elektrodensignalen arbeiten. Zwei dieser Steuerungen (Co-Kontraktionssteuerung und Rampenanstiegssteuerung) werden in den Tests als Referenzverfahren verwendet.
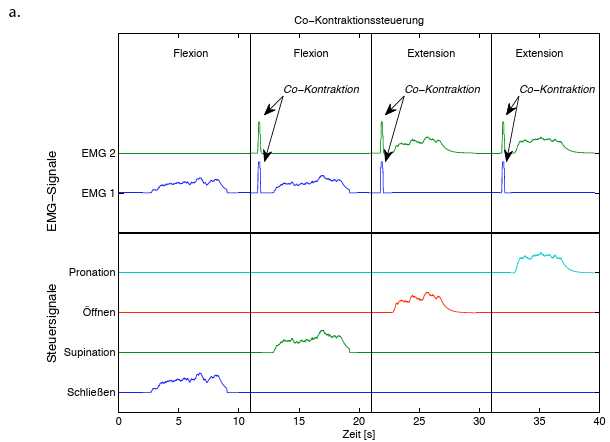
Co-Kontraktion
Bei der Co-Kontraktionssteuerung muss der Anwender beide Muskeln relativ stark gleichzeitig aktivieren, um durch eine solche Co-Kontraktion den Freiheitsgrad der Prothese zu wechseln (Abb. 1a). Führte vor einer Co-Kontraktion eine Handgelenksflexion zum Schließen der Prothese und eine Extension zum Öffnen derselben, so führen die beiden Muskelbewegungen nach der Co-Kontraktion zu Supination und Pronation der Prothese. Eine weitere CoKontraktion führt wieder zurück zum ersten Freiheitsgrad.
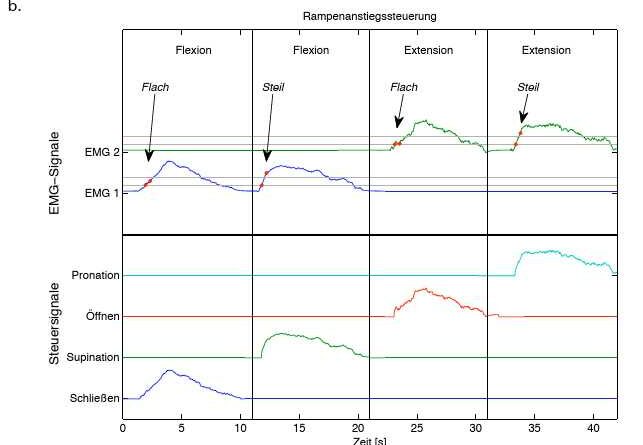
Rampenanstiegssteuerung
Bei dieser Steuerung kann der Benutzer den Freiheitsgrad der Prothese auswählen, indem er die initiale Anstiegsgeschwindigkeit des EMG-Signals verändert (Abb. 1b). So führt in der Regel eine anfangs langsame Extension/Flexion, die also einen flachen Anstieg der EMG-Aktivität aufweist, zum Öffnen/Schließen der Prothese, wohingegen der Anwender durch einen anfangs steilen Anstieg mit den gleichen, aber schnelleren Muskelbewegungen Prothesensupinationen/-pronationen durchführen kann.
Simultansteuerung
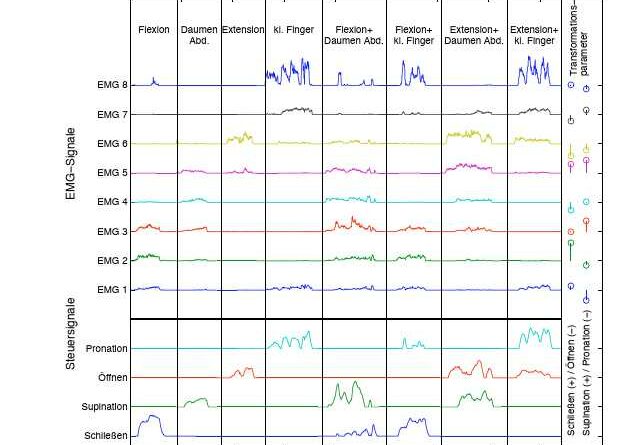
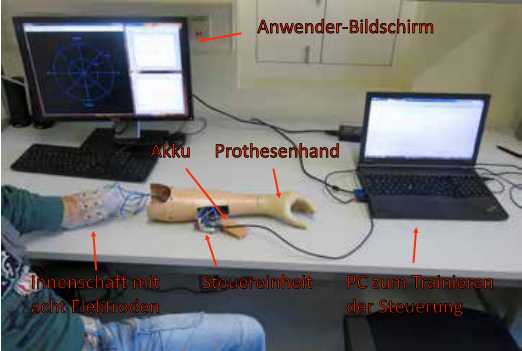
Um die miteinander korrelierten EMG-Aktivitätssignale voneinander zu trennen und in unabhängige Steuersignale zu transformieren, ist eine mathematische Transformation notwendig (Abb. 1c). In dem hier vorgestellten Regressionsverfahren wird eine lineare Transformation verwendet 15. Dazu wurde eine Myo-Steuereinheit entwickelt, die bis zu acht EMG-Signale in Steuersignale für eine Prothese mit zwei Freiheitsgraden („Hand öffnen/schließen“ und „Rotation“) transformieren kann (Abb. 2). Die Eingangssignale werden von konventionellen Elektrodenmodulen aus der Prothetik gewonnen, die bereits die Verstärkung, Filterung, Gleichrichtung und Glättung der Signale beinhalten und somit die Ampli tude der EMG-Signale extrahieren. Die Koeffizienten der linearen Transformation müssen für jeden Nutzer individuell mit Hilfe eines Algorithmus des maschinellen Lernens gelernt werden 16. Dazu wird ein mehrstufiges Verfahren angewendet, in dem sowohl der Anwender trainiert als auch die Transformation optimiert wird. Der Ablauf stellt sich wie folgt dar:
Identifizierung geeigneter Muskelkontraktionen
Zum Training und zur Auswahl geeigneter Muskelkontraktionen wird die Steuereinheit mit einem Computer verbunden (Abb. 2). Dort können die EMG-Aktivitätssignale ähnlich wie bei konventioneller Prothesensoftware grafisch dargestellt werden. Der Anwender wird gebeten, verschiedene Kontraktionen auszuführen, während Anwender und Techniker die EMG-Muster beobachten. Ziel ist es, vier verschiedene Muster zu identifizieren, die der Anwender sicher reproduzieren kann. Dabei darf sich die EMG-Aktivität in mehreren Kanälen überlappen; wichtig ist lediglich, dass sich die Aktivitätsmuster in mindestens einem Kanal voneinander unterscheiden. Aktive Anwender konventioneller Myoprothesen haben in der Regel eine sehr gute Kontrolle über ihre Handgelenksflexoren und ‑extensoren. Da die EMG-Signale dieser Muskeln bei konventionellen Steuerungen ein Öffnen und Schließen der Prothesenhand bewirken, assoziieren die meisten Prothesenträger die entsprechenden Kontraktionen bereits mit der neuen Funktion.
Zusätzlich dazu können beispielsweise die Kontraktionen getestet werden, die mit einer Pronation, Supination, Abduktion oder Adduktion des Handgelenks sowie dem Beugen oder Abspreizen einzelner Finger assoziiert werden. Grundsätzlich ist die Wahl möglichst intuitiver Bewegungen für die jeweils angestrebte Prothesenfunktion wünschenswert. Noch wichtiger ist es jedoch, gut differenzierbare Signalmuster zu wählen, um später eine zuverlässige Kontrolle zu erzielen. Bei regelmäßiger Nutzung einer Steuerung ist zu erwarten, dass auch solche Kontraktionen schnell intuitiv werden, die anfangs nicht mit der Prothesenfunktion assoziiert werden.
Generierung der Transformationsparameter
Sind vier EMG-Muster ermittelt, so werden diese mit einem Computerprogramm aufgezeichnet, das den Anwender genau instruiert, zu welchem Zeitpunkt welche Kontraktion ausgeführt werden soll. Die aufgezeichneten Signale werden von einem Algorithmus analysiert. Mit Hilfe eines Verfahrens des maschinellen Lernens werden die Parameter der Transformation bestimmt, mit denen die acht EMG-Aktivitätssignale bestmöglich in vier Steuersignale (je zwei für jeden der zwei Freiheitsgrade) umgewandelt werden können. Die Transformationsparameter bestimmen den Einfluss der einzelnen Elektroden auf die jeweilige Funktion. Die für den Nutzer in dieser Studie gelernten Parameter sind im rechten Teil von Abbildung 2c dargestellt, wobei negative Werte jeweils die antagonistische Bewegung zur positiven repräsentieren.
Training am Computer
Sobald die Transformation parametrisiert ist, kann der Anwender in einem Softwarefenster einen Cursor mit seinen vier Kontrollmustern in alle vier Richtungen (oben/unten, links/rechts) bewegen. Dabei ist Proportionalsteuerung möglich, d. h., je stärker die jeweilige Kontraktion ausgeführt wird, desto größer ist die Auslenkung des Cursors in die entsprechende Richtung. Obwohl der Algorithmus nur mit Einzelkontraktionen trainiert wird, können auch Simultanbewegungen ausgeführt werden, in denen zwei Bewegungen (eine pro Freiheitsgrad) miteinander kombiniert werden. Der Cursor bewegt sich dann je nach relativer Stärke der Einzelbewegungen in einem anderen Winkel.
Es folgt eine Trainingsphase für den Anwender, in der zufällig platzierte Kreise mit dem Cursor getroffen werden müssen, die je nach Position Einzel- oder Simultanbewegungen unterschiedlicher Kontraktionsstärke entsprechen. Zur weiteren Optimierung der Transformationsparameter kommt ein neuartiges co-adaptives Trainingsverfahren zum Einsatz, das in Zusammenarbeit mit der Gruppe für Maschinelles Lernen an der Technischen Universität Berlin und der Neural Engineering Group am City College in New York entwickelt wurde. Dabei trainiert der Anwender den Umgang mit der Steuerung, während der Algorithmus gleichzeitig lernt, die Signale des Anwenders besser zu interpretieren 17.
Steuerung der Prothese
Nach erfolgreichem Training werden die gelernten Transformationsparameter auf der Steuereinheit der Prothese gespeichert. Diese wird dann vom PC abgekoppelt, sodass ein eingebettetes, transportables Prothesensystem entsteht, das unabhängig vom Computer arbeiten kann. Die Steuereinheit transformiert die EMG-Aktivitätssignale mit Hilfe des gelernten Algorithmus in prothetische Steuersignale für das Öffnen und Schließen der Hand sowie für die Rotation des Handgelenks. Zur Erhöhung der Sicherheit können ähnlich wie bei konventionellen Steuerungen Schwellwerte definiert werden, die ungewollte Bewegungen bei geringer Muskelaktivität verhindern. Der Anwender kann dann die beiden Funktionen der Prothese proportional und gleichzeitig steuern, wobei die beiden Geschwindigkeiten (bzw. Rotationsgeschwindigkeit und Griffkraft) bei Simultanbewegungen unabhängig voneinander kontrolliert werden können. Dies erlaubt einen flüssigen Übergang zwischen Einzel- und Simultanbewegungen und führt zu einem sehr natürlichen Erscheinungsbild.
Evaluierung
Die Simultansteuerung wurde an einem Probanden mit transradialer Amputation (männlich, 56 Jahre, ca. 35 Jahre seit Amputation) evaluiert. Er trägt im Alltag eine Myoprothese ohne Rotation, die er über zwei Elektroden durch Handgelenksflexion und ‑extension proportional steuert und zum Greifen benutzt. Für die Simultansteuerung wurde ein spezieller Innenschaft gebaut, in den statt der üblichen zwei nun acht gleichmäßig verteilte, ringförmig angeordnete konventionelle Elektrodenmodule (Otto Bock, 13E200) integriert worden waren. Dieser wurde mit einem konventionellen Außenschaft mit Eingussring zur Aufnahme der Prothesenhand (System-Elektrohand DMC plus) und des Dreheinsatzes verbunden. Die Steuereinheit für die Simultansteuerung und ein konventioneller Prothesenakku, der das gesamte System mit Strom versorgt, wurden ebenfalls in den Außenschaft integriert. Für die Tests der konventionellen Steuerungen wurde der Innenschaft gegen eine Variante mit nur zwei Elektroden, die für Handgelenksflexion und ‑extension optimiert waren, getauscht und die Steuereinheit durch eine konventionelle Steuereinheit (Otto Bock MyoRotonik) ersetzt.
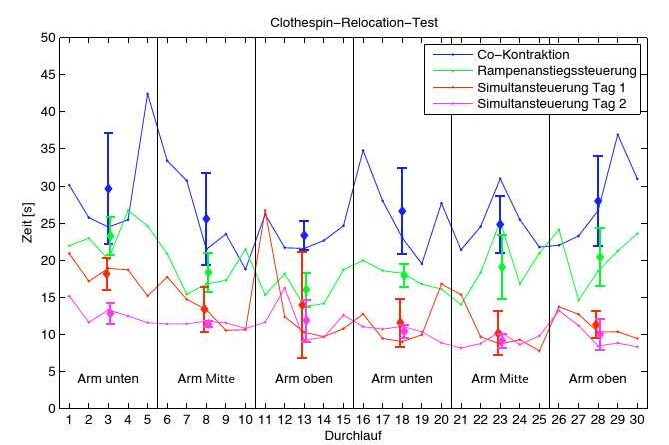
Alle drei Steuerungen wurden mittels des standardisierten Clothespin-Relocation-Tests 18 evaluiert. Dabei muss der Proband in einem Durchlauf möglichst schnell drei Wäscheklammern von einer horizontalen auf eine vertikale Stange versetzen (Abb. 3). Der Proband bekam bei jeder Steuerung die Gelegenheit, diesen Test kurz zu üben, bevor die eigentliche Messung begann. Er wurde gebeten, möglichst keine Ausgleichsbewegungen mit dem Körper zu vollführen, sondern beide Funktionen der Prothese zu verwenden. Um eine Klammer zu versetzen, musste der Proband dazu in den richtigen Winkel rotieren (Pronation), die Klammer greifen, etwa im rechten Winkel supinieren und die Klammer dann durch Handöffnen auf der vertikalen Stange absetzen. Da die Zuverlässigkeit anderer nichtkonventioneller Steuerungen oft durch eine Änderung der Armposition beeinträchtigt wird, wurde der Test in drei unterschiedlichen Höhen durchgeführt (63 cm, 76 cm, 150 cm). Um den Lerneffekt des Probanden sowie zufällige Schwankungen zu berücksichtigen, wurden jeweils fünf Durchläufe in einer Armposition vorgenommen und der gesamte Ablauf zweimal hintereinander durchgeführt.
Komplexere Steueralgorithmen, die auf maschinellem Lernen basieren, können versagen, wenn das gelernte Steuermodell an einem anderen Tag verwendet wird 19. Deshalb wurde die hier vorgestellte Simultansteuerung, die in diese Klasse fällt, an zwei unterschiedlichen Tagen getestet. An beiden Tagen wurden die gleichen Transformationskoeffizienten verwendet, die am ersten Tag trainiert wurden, sodass der oben beschriebene Effekt untersucht werden konnte. An beiden Tagen wurde zuerst die Simultansteuerung evaluiert, danach am ersten/zweiten Tag zusätzlich die Co-Kontraktionssteuerung/Rampenanstiegssteuerung. Das Experiment wurde von der lokalen Ethikkommission genehmigt und im Einklang mit der Deklaration von Helsinki durchgeführt.
Ergebnisse
Die Simultansteuerung schnitt von allen drei getesteten Steuerungen am besten ab (Abb. 4). Insbesondere innerhalb der ersten zehn Durchläufe verbesserte sich die Leistung kontinuierlich, was sich durch Lerneffekte des Probanden erklären lässt. Obwohl die Simultansteuerung nur in einer neutralen Armposition kalibriert wurde, schnitt sie in allen drei Positionen in etwa gleich gut ab. Im zweiten Test an einem anderen Tag (ohne Rekalibrierung des Systems) trat keine Verschlechterung ein.
Die Co-Kontraktionssteuerung war am langsamsten, was damit begründet ist, dass ein Umschalten zwischen Greifen und Rotation notwendig ist. Die Rampenanstiegssteuerung, bei der kein Umschalten notwendig ist, schnitt deutlich besser ab. Auch bei den konventionellen Steuerungen war keine Verschlechterung durch eine Veränderung der Armposition zu beobachten.
Diskussion und Ausblick
In dieser Studie wurde eine neue Steuerung für zwei unabhängige prothetische Freiheitsgrade vorgestellt, bei der kein Umschalten notwendig ist und bei der die beiden Funktionen sogar gleichzeitig nutzbar sind. Die Evaluierung hat gezeigt, dass damit eine zuverlässige simultane Steuerung möglich ist, mit der sich komplexe Bewegungen, für die beide Freiheitsgrade benötigt werden, schneller ausführen lassen als mit konventionellen Steuerungen.
Bei gleichzeitiger Nutzung beider Funktionen ist hervorzuheben, dass sich die Geschwindigkeit der beiden Freiheitsgrade unabhängig voneinander proportional steuern lässt, sodass es etwa möglich wird, die Prothese schnell zu öffnen, während gleichzeitig eine langsame Drehung im Handgelenk ausgeführt wird. Dies erlaubt einen sanften, natürlichen Übergang zwischen den verschiedenen Bewegungen und ist beispielsweise in Verfahren der Mustererkennung (Klassifizierung) nicht möglich. Interessanterweise muss der Anwender zum Trainieren des Steuermodells trotzdem nur Einzelbewegungen isolierter Freiheitsgrade ausführen, was wichtig ist, da die meisten Menschen mit Amputation oder angeborener Fehlbildung aufgrund des fehlenden propriozeptiven und taktilen Feedbacks oft große Schwierigkeiten haben, gezielte simultane Kontraktionen auszuführen. Sobald dieses Feedback durch den steuerbaren Computercursor oder die angeschlossene Prothese ersetzt wird, kann der Anwender trainieren und lernen, präzise Simultankontraktionen auszuführen.
Zwar braucht man für die Benutzung der Steuerung keine isolierte Ansteuerung einzelner EMG-Signale, es sind jedoch vier unterschiedliche EMG-Aktivitätsmuster notwendig. Ein weiterer Schwerpunkt der Forschung der Verfasser wird deshalb die Entwicklung von Trainingsprotokollen sein, die es allen Anwendern ermöglichen sollen, solche Kontraktionsmuster zuverlässig zu erzeugen. Mit Hilfe automatischer Selektionsverfahren könnte die Anzahl der verwendeten EMG-Elektroden reduziert werden, was die Kosten des Gesamtsystems und den Stromverbrauch reduzieren könnte 20. Insbesondere in Kombination mit implantierten Elektroden 21 ließe sich die Anzahl der unabhängig steuerbaren Freiheitsgrade mit diesem Steuerungsverfahren weiter erhöhen.
Weder die Simultansteuerung noch die konventionellen Steuerungen wurden von der wechselnden Armposition beeinträchtigt, obwohl nur in einer Position trainiert wurde – ein Szenario, in dem andere neuartige Steuerungen oft scheitern 22. Auch das Nutzen der Steuerung an einem anderen Tag ohne Nachtrainieren des Steuerungsmodells zeigte keine Verschlechterung – im Gegensatz zu anderen Steuerungen, bei denen die mit dem Abnehmen und Neuanlegen der Prothese einhergehenden unvermeidbaren Änderungen der Hautbedingungen und Elektrodenpositionen oft zu einer gravierenden Verschlechterung führten 23 24. Damit könnte es möglich werden, die Vorteile der präsentierten Simultansteuerung im Alltag zu nutzen, ohne täglich neu kalibrieren zu müssen.
Im nächsten Schritt ist deshalb geplant, diese Steuerung von einigen Anwendern über einen längeren Zeitraum im Alltag testen zu lassen, um ihren praktischen Nutzen und die Zuverlässigkeit beim längeren Tragen und unter bisher nicht betrachteten Bedingungen zu evaluieren. Prothesenträger und Orthopädie-Techniker werden ermutigt, sich bei Interesse an der Steuerung oder zwecks Teilnahme an einer Studie mit den Autoren in Verbindung zu setzen.
Danksagung
Diese Arbeit wurde unterstützt durch das vom Europäischen Forschungsrat finanzierte DEMOVE-Projekt (267888).
Für die Autoren:
Janne M. Hahne
Institut für Neurorehabilitationssysteme
Universitätsmedizin Göttingen
Von-Siebold-Str. 6, 37075 Göttingen
janne.hahne@bccn.uni-goettingen.de
Begutachteter Beitrag/reviewed paper

- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Reiter R. Eine neue Elektrokunsthand. Grenzgeb Med, 1948; 1 (4): 133–135
- Sherman ED. A Russian Bioelectric-Controlled Prosthesis. Can Med Assoc J, 1964; 91 (24): 1268–1270
- Ortiz-Catalan M, Sander N, Kristoffersen MB, Håkansson B, Brånemark R. Treatment of phantom limb pain (PLP) based on augmented reality and gaming controlled by myoelectric pattern recognition: a case study of a chronic PLP patient. Neuroprosthetics, 2014; 8: 24
- Belter JT, Segil JL, Dollar AM, Weir RF. Mechanical design and performance specifications of anthropomorphic prosthetic hands: a review. J Rehabil Res Dev, 2013; 50 (5): 599–618
- Muzumdar A. Powered upper limb prostheses: control, implementation and clinical application. Berlin u. a.: Springer, 2004
- Parker P, Englehart K, Hudgins B. Myoelectric signal processing for control of powered limb prostheses. J Electromyogr Kinesiol, 2006; 16 (6): 541–548
- Graupe D, Cline WK. Functional Separation of EMG Signals via ARMA Identification Methods for Prosthesis Control Purposes. IEEE Trans Syst Man Cybern, 1975; SMC‑5 (2): 252–259
- Oskoei MA, Hu H. Myoelectric control systems – a survey. Biomed Signal Process Control, 2007; 2 (4): 275–294
- Coapt LLC (Unternehmenshomepage). https://www.coaptengineering.com (Zugriff am 07.02.2016)
- Jiang N, Dosen S, Muller KR, Farina D. Myoelectric control of artificial limbs – is there a need to change focus? [In the Spotlight]. IEEE Signal Processing Magazine, 2012; 29 (5): 148–152
- Sugiyama M, Krauledat M, Müller K‑R. Covariate Shift Adaptation by Importance Weighted Cross Validation. J Mach Learn Res, 2007; 8: 985‑1005
- Fougner A, Scheme E, Chan ADC, Englehart K, Stavdahl Ø. Resolving the Limb Position Effect in Myoelectric Pattern Recognition. IEEE Trans Neural Syst Rehabil Eng, 2011; 19 (6): 644–651
- Hargrove L, Englehart K, Hudgins B. A training strategy to reduce classification degradation due to electrode displacements in pattern recognition based myoelectric control. Biomed Signal Process Control, 2008; 3 (2): 175–180
- Fougner A, Stavdahl O, Kyberd PJ, Losier YG, Parker PA. Control of Upper Limb Prostheses: Terminology and Proportional Myoelectric Control – A Review. IEEE Trans Neural Syst Rehabil Eng, 2012; 20 (5): 663–677
- Hahne JM, Biessmann F, Jiang N, Rehbaum H, Farina D, Meinecke FC, Muller KR, Parra LC. Linear and Nonlinear Regression Techniques for Simultaneous and Proportional Myoelectric Control. IEEE Trans Neural Syst Rehabil Eng, 2014; 22 (2): 269–279
- Hahne JM, Biessmann F, Jiang N, Rehbaum H, Farina D, Meinecke FC, Muller KR, Parra LC. Linear and Nonlinear Regression Techniques for Simultaneous and Proportional Myoelectric Control. IEEE Trans Neural Syst Rehabil Eng, 2014; 22 (2): 269–279
- Hahne J, Dahne S, Hwang H‑J, Muller K‑R, Parra L. Concurrent Adaptation of Human and Machine Improves Simultaneous and Proportional Myoelectric Control. IEEE Trans Neural Syst Rehabil Eng, 2015; 19 (6): 644–651
- Amsuess S, Vujaklija I, Gobel P, Roche A, Graimann B, Aszmann O, Farina D. Context-Dependent Upper Limb Prosthesis Control for Natural and Robust Use. IEEE Trans Neural Syst Rehabil Eng, 2015 Jul 9 [Epub ahead of print]
- Vidovic M, Hwang H‑J, Amsuss S, Hahne J, Farina D, Muller K‑R. Improving the Robustness of Myoelectric Pattern Recognition for Upper Limb Prostheses by Covariate Shift Adaptation. IEEE Trans Neural Syst Rehabil Eng, 2015 Oct 26 [Epub ahead of print]
- Hwang H‑J, Hahne JM, Müller K‑R. Channel selection for simultaneous and proportional myoelectric prosthesis control of multiple degrees-of-freedom. J Neural Eng, 2014; 11 (5): 056008
- Farina D, Yoshida K, Stieglitz T, Koch KP. Multichannel thin-film electrode for intramuscular electromyographic recordings. J Appl Physiol, 2008; 104 (3): 821–827
- Fougner A, Scheme E, Chan ADC, Englehart K, Stavdahl Ø. Resolving the Limb Position Effect in Myoelectric Pattern Recognition. IEEE Trans Neural Syst Rehabil Eng, 2011; 19 (6): 644–651
- Vidovic M, Hwang H‑J, Amsuss S, Hahne J, Farina D, Muller K‑R. Improving the Robustness of Myoelectric Pattern Recognition for Upper Limb Prostheses by Covariate Shift Adaptation. IEEE Trans Neural Syst Rehabil Eng, 2015 Oct 26 [Epub ahead of print]
- Jiang N, Muceli S, Graimann B, Farina D. Effect of arm position on the prediction of kinematics from EMG in amputees. Med Biol Eng Comput, 2013; 51 (1–2): 143–151
