Im Rahmen der hier vorgestellten Studie wurden mit Hilfe einer biomechanischen Modellierung die vorherrschenden Gelenkkräfte im Schultergelenk sowie die muskuläre Belastung und Beweglichkeit im Bereich des Rumpfes bei der Nutzung eines herkömmlichen Greifreifen-Rollstuhls im Vergleich mit einem neuartigen Hebelantrieb-Rollstuhl analysiert. Es kann gezeigt werden, dass die muskuläre Belastung bei Verwendung des Hebelantriebes im Vergleich zum Greifreifenantrieb geringer ausfällt. Zudem ist die Mobilität im Rumpfbereich beim Hebelantrieb größer.
Einleitung
Der Rollstuhl ist ein technisches Hilfs- bzw. Rehabilitationsmittel, das einen Ausgleich der Auswirkungen eines physischen Funktionsausfalls gewährleistet. Im Alltag mobilitätseingeschränkter Menschen ist der Rollstuhl ein unentbehrliches Hilfsmittel zur Fortbewegung. Durch den Rollstuhl wird ihr Bewegungsradius erhöht, und er verhilft ihnen zu mehr Selbstständigkeit 1. In Deutschland nutzen mehr als 1,5 Millionen Menschen einen Rollstuhl – dauerhaft oder zeitweise 2. Diese Betroffenengruppe besteht zu etwa gleichen Teilen aus Senioren und Menschen mit körperlichen Behinderungen 3.
Man unterscheidet bei Rollstühlen neben dem Verwendungszweck, der Bauart sowie besonderen Merkmalen unter anderem die Form des Antriebes: Die konstruktive Ausführung und Bauart (Hebel‑, Handkurbel‑, Greifreifen‑, Elektrorollstuhl usw.) des Rollstuhls richtet sich nach der Form des Antriebes (eigenkraft- oder fremdkraftbasiert) und der Art der Lenkung (direkt oder indirekt) 4. Besonders bei manuell angetriebenen Rollstühlen kommt es allerdings bei den Benutzern häufig zu Problemen in den Gelenken der oberen Extremität 5 6 7 8 9 10 11. Zudem ist eine gewisse Rumpfbeweglichkeit wichtig, da diese die obere Extremität bei der Bewegung unterstützt 12.
Um exaktere Aussagen über mechanische Belastungen und detaillierte Verletzungsmechanismen in einzelnen Körperstrukturen – speziell für Gelenke – bei dynamischen Abläufen zu gewinnen, sind Verfahren wie beispielsweise eine Videoanalyse oder (invasive) Messmethoden jedoch nur begrenzt bzw. gar nicht geeignet 13. Direkte (physikalische) Messverfahren in Bezug auf die Bestimmung der vorherrschenden Gelenkkräfte, ohne die Gelenkstruktur invasiv zu manipulieren, existieren zum jetzigen Zeitpunkt nicht. Patientenspezifische Informationen über die in vivo wirkenden Kräfte stehen in der klinischen Routine bis heute nicht zur Verfügung 14.
Hier setzt die biomechanische Modellierung bzw. Modellbildung an: Die biomechanische Modellierung ermöglicht es, u. a. resultierende Gelenkbelastungen oder ‑bewegungen a priori zu analysieren, die mit klassischen Messmethoden nicht am Patienten erfasst werden können 15 16. Die biomechanische Modellierung und die daraus resultierenden Möglichkeiten der Simulation und deren Variation mittels des Modells können ein effektives Werkzeug sein, um beispielsweise Sensitivitätsanalysen durchzuführen und somit Optimierungspotenziale aufzudecken.
Der Fokus der hier vorgestellten Studie besteht in der Untersuchung biomechanischer Zusammenhänge bzw. des Interaktionsverhaltens muskuloskelettaler Komponenten wie Gelenke, Weichteilstrukturen oder eine Kombinationen aus beiden. Man unterscheidet bei der biomechanischen Modellierung zwei Ansätze: zum einen die Finite-Elemente-Methode (FEM), die sich allerdings angesichts des hohen Rechenaufwandes eher für Untersuchungen von Details – beispielsweise die Bestimmung von Verformungen oder von Lastverteilungen im Gelenk („mikroskopischer Blick“) – eignet. Zum anderen gibt es die sogenannte Mehrkörpersimulation (MKS), bei der es sich um eine Starrkörpermodellierung handelt. Dabei werden die einzelnen Körpersegmente als Starrkörper approximiert. Dadurch entsteht anhand spezifischer Segmenteigenschaften (z. B. Segmentlänge oder Segmentmasse) in Verbindung mit Informationen darüber, wie die einzelnen Segmente miteinander verbunden sind (z. B. Gelenktyp oder Gelenkposition), ein vollständiges Gelenkmodell bzw. eine komplette kinematische Kette („makroskopischer Blick“), die anschließend zur Simulation herangezogen werden kann.
In der biomechanischen Modellierung hat sich – bedingt durch die leichtere Informationsakquise (in den meisten Fällen Bewegungsdaten) und den geringeren Rechenaufwand – der Ansatz der Mehrkörpersimulation durchgesetzt, um Fragestellungen im Bereich der Belastungsanalyse beantworten zu können. Der Ansatz der Verwendung eines Mehrkörper-Simulationsmodells wurde bereits im Zusammenhang mit rollstuhlspezifischen Fragestellungen eingesetzt und kann als etablierter Ansatz zur Abschätzung der vorhandenen Belastungen im Kontext der Benutzung eines Rollstuhls angesehen werden 17 18.
Im Rahmen der hier vorgestellten Studie wurden vorherrschende Belastungen im Schultergelenk sowie die muskuläre Belastung im Bereich des Rumpfes bei der Benutzung eines herkömmlichen Greifreifen-Rollstuhls im Vergleich mit einem neuartigen Handhebel-Rollstuhl evaluiert. Der Handhebel-Rollstuhl verfügte zusätzlich über eine mobile (dynamische) Sitzfläche, die in Abhängigkeit von der jeweiligen Antriebsgriffstellung bewegt wurde. Um eine möglichst uneingeschränkte Vergleichbarkeit zu gewährleisten, wurde für beide Versuche das Modell „Radius“ der Firma Desino GmbH aus Köln verwendet. Im Falle des Greifreifen-Rollstuhls wurde die Hebeltechnik abgebaut und die dynamische Sitzfläche entkoppelt, sodass es sich letztlich um einen Standard-Rollstuhl handelte. Das hatte den Vorteil, dass die Geometrie des Rollstuhls keinen Einfluss auf die Probanden bzw. die Versuchsdurchführung hatte.
Material und Methode
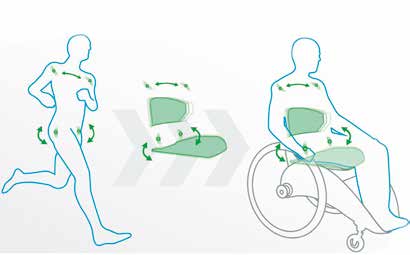
Grundlage für die Untersuchung war eine Bewegungsanalyse mit insgesamt 9 Probanden. Bei den Probanden handelte es sich um gesunde Freiwillige, die den jeweiligen Bewegungstest absolvierten. Anhand der Benutzung eines herkömmlichen Greifreifen-Rollstuhls sowie eines neuartigen Modells, das mit einem Hebelantrieb und einer mobilen Sitzfläche ausgestattet war, wurden die für die biomechanische Modellierung benötigten Bewegungsinformationen akquiriert. Die mobile Sitzfläche erlaubte eine Bewegung um eine zentrale, in der Mitte der Sitzfläche gelegene Längsachse; zusätzlich ist eine Verkippung der Rückenlehne um eine von vorne nach hinten gerichtete Achse möglich. Der Hebelantrieb überträgt einen natürlichen Bewegungsablauf auf die dynamische Sitzfläche, wodurch Wirbelsäule, Muskulatur und das lymphatische System mobilisiert werden (Abb. 1).
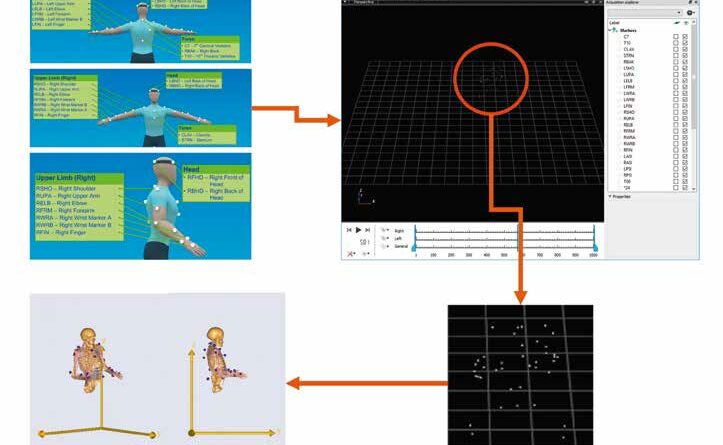
Die Bewegungsdaten wurden mittels eines Vicon-Nexus-Systems an der Sporthochschule Köln aufgenommen; die anthropometrischen Daten der jeweiligen Testkandidaten sind Tabelle 1 zu entnehmen. Bei dem Trackingsystem handelt es sich um ein optisches System, das mittels Verfolgung von aufgeklebten reflektierenden Markern die Bewegungstrajektorie des jeweiligen Segments aufnimmt. Es wurde darauf geachtet, dass Marker und Kamera immer eine direkte „line of sight“ aufwiesen und es zu keiner Markerabschattung kam.
Diese Bewegungsdaten standen anschließend für die biomechanische Modellierung zur Verfügung. Für die weitere Auswertung wurden aus zeitlichen Gründen lediglich die Bewegungsdaten der Probanden JB, LR und MK herangezogen. Die anhand der Bewegungsanalyse zur Verfügung stehenden Daten (als C3D-Dateien) der einzelnen Marker wurden in Bezug auf Markerbenennung und ‑position vereinheitlicht. Die resultierenden Bewegungsinformationen wurden in einem zweiten Schritt wiederum in die Mehrkörper-Simulationsumgebung „AnyBody“ (Version 6.0, AnyBody Technology A/S, Aalborg, Dänemark) überführt (Abb. 2). Damit wurde ein Modell konzipiert, das mit Hilfe der akquirierten Marker-Daten aus der Bewegungsanalyse angetrieben werden kann. Das Modell besteht aus der oberen Körperhälfte inklusive der Beckenregion (Abb. 3). Die untere Extremität (rechtes und linkes Bein) wurde zwecks zeiteffizienterer Simulation ausgeblendet. Bei dem Modell handelte es sich um ein bereits vorhandenes und etabliertes Modell aus der Datenbank der AnyBody-Software 19.
Mittels einer Verhältnisrechnung (Abb. 4; Tab. 2), basierend auf Körpergröße und ‑gewicht der in die Simulation eingeschlossenen Probanden, wurden die entsprechenden Segmentlängen und ‑massen des jeweiligen Modells probandenspezifisch angepasst. Die Schulterpartie stellt eine besondere Problemzone für Rollstuhlfahrer dar 20 21 22 23 24 25 26. Daher wurde im Rahmen der Simulation ein Augenmerk auf die auftretenden Belastungen in diesem Gelenk gelegt.
Ergebnisse
In den Tabellen 3 bis 6 sind die erzielten Simulationsergebnisse zusammengefasst. Die Bezeichnung der einzelnen Kräfte spiegelt die Kraftrichtung anhand anatomischer Bezeichnungen wider. Angesichts der vielfältigen Auswertungs- und Ausgabemöglichkeiten der Simulationssoftware wird der Fokus im weiteren Verlauf exemplarisch auf die wichtigsten Aspekte im Kontext der Belastungsanalyse beim Gebrauch eines Rollstuhls gelegt.
Diskussion
Ein Rollstuhl ist für die Patienten bzw. die Betroffenen in vielen Fällen nicht nur ein reines Hilfsmittel, sondern ein ständiger Begleiter und somit neben der reinen Fortbewegung gleichzeitig mehr oder weniger ein Trainings- bzw. Sportgerät. Im Rahmen der hier vorgestellten Studie wurde mittels biomechanischer Modellierung bzw. mittels Mehrkörpersimulation die Belastungssituation bei zwei Rollstuhlmodellen analysiert.
Im Rahmen der Belastungsanalyse ergab sich für das Glenohumeralgelenk, dass bei den untersuchten Probanden „distraction force“ (medial/lateral gerichtete Kraft) und „anteroposterior force“ im Glenohumeralgelenk beim Handhebel deutlich geringer waren als beim Greifreifen. Die „inferior-superior force“ war mit Handhebel nur leicht erhöht bzw. gleich (Tab. 3). Dies weist auf eine mögliche Entlastung des Schultergelenks durch Benutzen des Hebelantriebs statt des Greifreifens hin. In Bezug auf das Radiokarpalgelenk wurde festgestellt, dass die Radialkraft bei Verwendung des Handhebelantriebs tendenziell höhere Werte im Vergleich zum Greifreifenantrieb zeigte. Für die übrigen Kräfte sowie das axiale Moment können anhand der vorliegenden Simulationsergebnisse keine eindeutigen Tendenzen beschrieben werden, da die Belastungsunterschiede zwischen Handhebel- und Greifreifenantrieb bei den drei Probanden unterschiedlich ausgeprägt waren (Tab. 4). Die Ausrichtung des Handgelenks bzw. seine Schiefstellung gegenüber dem Unterarm war bei Handhebel- und Greifreifenantrieb im Rahmen dieser Simulation ähnlich. Somit lässt sich der Schluss ziehen, dass die Belastung des Radiokarpalgelenkes bei beiden Antriebsarten identisch ausfällt.
Bei den großen Muskelgruppen wurde ermittelt, dass die maximale Kraft eines Muskelanteils des Musculus trapezius scapularis bei allen drei Probanden mit Greifreifen höher war als mit Handhebel. Dies spricht für eine höhere Belastung bei Verwendung eines Greifreifen-Rollstuhls. Für die Musculi latissimi dorsi war die maximale anteilige Kraft bei allen drei Probanden mit Handhebel größer als mit Greifreifen. Beide Bereiche – „thoracic“ (Pars sternocostalis) und „clavicular“ (Pars clavicularis) – des Musculus pectoralis major wurden mit Greifreifenantrieb nicht belastet; bei Verwendung des Handhebelantriebs zeigen die Simulationsergebnisse teilweise eine Muskelkraft von wenigen Newton (Tab. 5).
Exemplarisch wurden zwei Anteile im Lendenbereich der autochthonen Rückenmuskulatur (Musculus erector spinae) betrachtet. Der T5L5-Anteil des M. erector spinae war im Rahmen der durchgeführten Simulationen nicht aktiv. Die maximale Muskelkraft des T4L4-Anteils befand sich für alle Probanden und bei beiden Antriebsarten in derselben Größenordnung; somit zeigte sich aus der Perspektive der Belastung kein Unterschied. Es ist allerdings zu beachten, dass sich diese Ergebnisse nur auf die simulierten Muskelanteile beziehen; die Gesamtkräfte der einzelnen Muskeln wurden nicht berechnet.
Um die Bewegung der Lendenwirbelsäule zu untersuchen, wurde exemplarisch die Translation des L4/L5-Gelenks im Raum betrachtet (Tab. 6). Im Falle des Hebelantriebes in Kombination mit einer mobilen Sitzfläche ergibt sich gleichzeitig neben dem Antrieb auch eine zusätzliche Rumpfmobilität. In der Simulation zeigte dieser Gelenkpunkt bei Verwendung des Hebelantriebs einen vielfachen Bewegungsumfang in der Transversalebene im Vergleich zum konventionellen Greifreifen. Das deutet darauf hin, dass die bewegliche Sitzkonstruktion des Rollstuhls eine erhöhte Beweglichkeit der Lendenwirbelsäule und des Beckens ermöglicht. Das heißt, die Bewegung des Rumpfes wird im Vergleich zum handgetriebenen Rollstuhl erhöht und somit gleichzeitig die dortige Muskulatur aktiviert.
Limitationen
Grundsätzlich bringt die Modellbildung bzw. die sich anschließende Simulation Limitierungen mit sich. Dazu gehören Vereinfachungen, die aufgrund der fehlenden Möglichkeit, In-vivo-Kräfte zu messen, getroffen werden müssen. Diese entsprechen je nach System mehr oder weniger den allgemein anerkannten zulässigen Annahmen und Vereinfachungen bei der Modellierung muskuloskelettaler Systeme. Dazu gehören:
- die Approximation menschlicher Gelenke durch einfache technische Gelenke (bspw. Schultergelenk als Kugelgelenk, Handgelenk als Kardangelenk);
- die Approximation flächig ansetzender Muskeln und Bänder am Knochen durch einzelne punktförmig ansetzende Strukturen;
- die Approximation der Muskel- und Bandzugrichtung und deren (Hebelarm-)Wirkung durch Einfügen einfacher geometrischer Formen oder reibungsfreier Umlenkpunkte, mit deren Hilfe die Muskel- und Bandumwicklung um angrenzende Strukturen herum oder auch der Muskel- und Bandverlauf selbst an die Realität angenähert wird;
- die Beschreibung der funktionellen Muskel- und Bandeigenschaften durch vereinfachte technische/mathematische (Material-)Modelle.
Diese Vereinfachungen können sich in den Simulationsergebnissen widerspiegeln und verantwortlich für Abweichungen zwischen experimentell ermittelten Ergebnissen und Simulationsergebnissen sein. Mittels Mehrkörper-Simulationsumgebung können keine Kräfte „gemessen“ werden.
Die Greifkraft hätte im Rahmen der Bewegungsuntersuchungen idealerweise direkt mit detektiert werden können, da hier ein physikalisches Messverfahren möglich gewesen wäre. Zudem lag die Betrachtung des Ellenbogengelenkes nicht im Fokus dieser Studie.
Die ermittelten Simulationsergebnisse beinhalten keine Informationen aus extern aufgebrachten Kräften (Interaktion zwischen Modell und Rollstuhl), sodass die jeweiligen Kraftverläufe aus den Massenträgheiten der jeweils bewegten Körpersegmente bestehen
Bei der Interpretation der Ergebnisse muss zudem die geringe Probandenzahl berücksichtigt werden (n = 3).
Eine umfassende Analyse der mobilen bzw. dynamischen Sitzfläche in Bezug auf die Verbesserung der Mobilisation von Wirbelsäule und Muskulatur wurde nicht vorgenommen, da hierzu zusätzliche Messungen – beispielsweise ein differenzierteres Tracking der einzelnen Wirbelsäulenabschnitte bzw. eine Elektromyographie zur Muskelaktivität – hätten durchgeführt werden müssen. Dies lag nicht im Fokus dieser Untersuchung.
Schlussfolgerung
Im Rahmen der Studie konnte gezeigt werden, dass es Unterschiede bezüglich der Belastung und der Bewegungsausmaße bei der Verwendung unterschiedlicher Rollstuhlkonzepte gibt. Um möglichst wenige Probleme durch eine Atrophie von Muskelmasse zu bekommen, ist eine Aktivierung bzw. ein Training der betroffenen Muskelpartien wichtig. Durch den „aktiveren“ Antrieb und die mobile Sitzfläche bei dem neuartigen Handhebel-Rollstuhl konnte anhand der Simulationsergebnisse gezeigt werden, dass hierbei in Bezug auf das Bewegungsausmaß ein Vorteil besteht. Welchen Rollstuhl man aber schließlich idealerweise einsetzt bzw. für welchen Rollstuhltyp man sich entscheidet, ist immer individuell auf die zu versorgende Person und deren Krankheitsbild abzustimmen.
Danksagung
Diese Arbeit wurde am Lehrstuhl für Medizintechnik der RWTH Aachen University durchgeführt. Die Bewegungsanalysen fanden an der Sporthochschule Köln statt.
Für die Autoren:
Dr. ‑Ing. Jörg Eschweiler
Universitätsklinikum der RWTH
Aachen, Klinik für Orthopädie
AG Klinisch-experimentelle orthopädische Biomechanik
Pauwelsstr. 30
52074 Aac
joeschweiler@ukaachen.de
Begutachteter Beitrag/reviewed paper
Eschweiler J., Tingart M. Gelenkentlastung und Beweglichkeit durch Hebelantrieb im Vergleich zum konventionellen Greifreifen-Rollstuhl. Orthopädie-Technik. Orthopädie Technik. 2019; 70 (9): 20–25
| Proband | Körpergewicht [kg] | Körpergröße [m] |
|---|---|---|
| JB | 79 | 1,82 |
| LR | 67 | 1,65 |
| MK | 76 | 1,78 |
| P3 | 75 | 1,54 |
| P4 | 78 | 1,76 |
| P5 | 90 | 1,92 |
| P6 | 98 | 1,82 |
| P7 | n/a | n/a |
| P8 | 70 | 1,67 |
| Segment | Definition | Segment Gewicht/gesamt Körpergewicht |
|---|---|---|
| Hand | Handgelenksachse/2. Fingergelenk Mittelfinger | 0.006 M |
| Unterarm | Ellbogenachse/Processus styloideus ulnae | 0.016 M |
| Oberarm | Glenohumerale Achse/Ellbogenachse | 0.028 M |
| Unterarm und Hand | Ellbogenachse/Processus styloideus ulnae | 0.022 M |
| Gesamter Arm | Glenohumeralgelenk/Processus styloideus ulnae | 0.050 M |
| MK | JB | LR | ||||
|---|---|---|---|---|---|---|
| Handhebel | Greifreifen | Handhebel | Greifreifen | Handhebel | Greifreifen | |
| Distraktionskraft [N] | 275/240 | 355/400 | 170/210 | 470/700 | 260/270 | 400/710 |
| Inferior-superiore Kraft [N] | 140/120 | 105/115 | 105/55 | 100/65 | 170/80 | 88/220 |
| Anterior-posteriore Kraft [N] | 82/65 | 150/150 | 45/65 | 100/180 | 90/85 | 130/240 |
| MK | JB | LR | ||||
|---|---|---|---|---|---|---|
| Handhebel | Greifreifen | Handhebel | Greifreifen | Handhebel | Greifreifen | |
| Radialkraft [N] | 40/37 | 27/20 | 8.0/12.5 | 5/7 | 21.0/9.2 | 5.1/12 |
| Proximodistale Kraft [N] | 85/155 | 60/125 | 20/25 | 38/100 | 60/20 | 10.5/32 |
| Dorsovolare Kraft [N] | 12.5/55.0 | 18.5/60.0 | 13/20 | 11/36 | 20/9 | 7/12 |
| Axiales Moment [Nm] | 0.7/0.3 | 1.5/2.0 | 0.07/0.16 | 0.055/0.170 | 0.225/0.100 | 0.055/0.01 |
| MK | JB | LR | ||||
|---|---|---|---|---|---|---|
| Handhebel | Greifreifen | Handhebel | Greifreifen | Handhebel | Greifreifen | |
| M. trapezius, scapular part [N] | 12/11 | 15.5/12.0 | 8.3/12.0 | 22/8.5 | 10/9 | 20/12 |
| M. trapezius, clavicular part [N] | 11.7/11.5 | 10.0/10.8 | 13.1/12.8 | 13/10 | 10.8/10.3 | 13.5/11.5 |
| M. latissimus dorsi [N] | 16/15.5 | 10.1/6.5 | 30.0/16.5 | 16/6 | 15.5/6.1 | 15.3/1.7 |
| M. pectoralis major, thoracic part [N] | 0/0 | 0/0 | 0.0/2.7 | 0/0 | 1.7/0.0 | 0/0 |
| M. pectoralis major, clavicular part [N] | 2.2/3.1 | 0/0 | 0.0/2.9 | 0/0 | 1.9/0.0 | 0/0 |
| MK | JB | LR | ||||
|---|---|---|---|---|---|---|
| Handhebel | Greifreifen | Handhebel | Greifreifen | Handhebel | Greifreifen | |
| x‑Translation [mm] | 23 | 7 | 38 | 5 | 30 | 4 |
| y‑Translation [mm] | 26 | 5 | 35 | 4 | 31 | 6 |
| z‑Translation [mm] | 16 | 9 | 12 | 6 | 11 | 14 |


- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Kloosterman MG, Snoek GJ, van der Woude LH, et al. A systematic review on the pros and cons of using a pushrim-activated power-assisted wheelchair. Clinical Rehabilitation, 2013; 27: 299–313
- Stiftung MyHandicap gemeinnützige GmbH. Der Rollstuhl: Mobilität für Menschen mit Handicap. http://www.myhandicap.de/rollstuhl.html (Zugriff am 08.07.2019)
- Stiftung MyHandicap gemeinnützige GmbH. Der Rollstuhl: Mobilität für Menschen mit Handicap. http://www.myhandicap.de/rollstuhl.html (Zugriff am 08.07.2019)
- Kraft M, Disselhorst-Klug C (Hrsg.). Biomedizinische Technik – Rehabilitationstechnik. Berlin, Boston: De Gruyter, 2015
- Mercer JL, Boninger M, Koontz A, et al. Shoulder joint kinetics and pathology in manual wheelchair users. Clinical Biomechanics, 2006; 21: 781–789
- Boninger ML, Cooper RA, Baldwin MA, et al. Wheelchair pushrim kinetics: Body weight and median nerve function. Archives of Physical Medicine and Rehabilitation, 1999; 80: 910–915
- Boninger ML, Cooper RA, Baldwin MA, et al. Wheelchair pushrim kinetics: Body weight and median nerve function. Archives of Physical Medicine and Rehabilitation, 1999; 80: 910–915
- Boninger ML, Souza AL, Cooper RA, et al. Propulsion patterns and pushrim biomechanics in manual wheelchair propulsion. Archives of Physical Medicine and Rehabilitation, 2002; 83: 718–723
- Burnham RS, May L, Nelson E, et al. Shoulder pain in wheelchair athletes: The role of muscle imbalance. The American Journal of Sports Medicine, 1993; 21: 238–242
- Curtis KA, Drysdale GA, Lanza RD, et al. Shoulder pain in wheelchair users with tetraplegia and paraplegia. Archives of Physical Medicine and Rehabilitation, 1999; 80: 453–457
- Cooper RA, Boninger ML, Chan L, et al. Manual wheelchair pushrim biomechanics and axle position. Archives of Physical Medicine and Rehabilitation, 2002; 81: 608–613
- Dubowsky SR, Rasmussen J, Sisto SA, et al. Validation of a musculoskeletal model of wheelchair propulsion and its application to minimizing shoulder joint forces. Journal of Biomechanics, 2008; 41: 2981–2988
- Lehner S. Entwicklung und Validierung biomechanischer Computermodelle und deren Einsatz in der Sportwissenschaft. Dissertation, Universität Koblenz, 2007. https://kola.opus.hbz-nrw.de/opus45-ko-la/frontdoor/deliver/index/docId/202/file/Dissertation_Stefan_Lehner.pdf (Zugriff am 08.07.2019)
- Eschweiler J, Migliorini F, Siebers H et al. Biomechanische Modellierung und ihre Bedeutung für die Hüftendoprothetik. Der Orthopäde, 2019; 48: 282–291
- Dubowsky SR, Rasmussen J, Sisto SA, et al. Validation of a musculoskeletal model of wheelchair propulsion and its application to minimizing shoulder joint forces. Journal of Biomechanics, 2008; 41: 2981–2988
- Eschweiler J, Migliorini F, Siebers H et al. Biomechanische Modellierung und ihre Bedeutung für die Hüftendoprothetik. Der Orthopäde, 2019; 48: 282–291
- Dubowsky SR, Rasmussen J, Sisto SA, et al. Validation of a musculoskeletal model of wheelchair propulsion and its application to minimizing shoulder joint forces. Journal of Biomechanics, 2008; 41: 2981–2988
- Louis N. Comments about the article titled: Validation of a musculoskeletal model of wheelchair propulsion and its application to minimizing shoulder joint forces, written by S. R. Dubowsky, J. Rasmussen, S. A. Sisto, N. A. Langrana (41(2008) 2981–2988). Journal of Biomechanics, 2009; 42: 2627
- Dubowsky SR, Rasmussen J, Sisto SA, et al. Validation of a musculoskeletal model of wheelchair propulsion and its application to minimizing shoulder joint forces. Journal of Biomechanics, 2008; 41: 2981–2988
- Mercer JL, Boninger M, Koontz A, et al. Shoulder joint kinetics and pathology in manual wheelchair users. Clinical Biomechanics, 2006; 21: 781–789
- Boninger ML, Cooper RA, Baldwin MA, et al. Wheelchair pushrim kinetics: Body weight and median nerve function. Archives of Physical Medicine and Rehabilitation, 1999; 80: 910–915
- Boninger ML, Cooper RA, Baldwin MA, et al. Wheelchair pushrim kinetics: Body weight and median nerve function. Archives of Physical Medicine and Rehabilitation, 1999; 80: 910–915
- Boninger ML, Souza AL, Cooper RA, et al. Propulsion patterns and pushrim biomechanics in manual wheelchair propulsion. Archives of Physical Medicine and Rehabilitation, 2002; 83: 718–723
- Burnham RS, May L, Nelson E, et al. Shoulder pain in wheelchair athletes: The role of muscle imbalance. The American Journal of Sports Medicine, 1993; 21: 238–242
- Curtis KA, Drysdale GA, Lanza RD, et al. Shoulder pain in wheelchair users with tetraplegia and paraplegia. Archives of Physical Medicine and Rehabilitation, 1999; 80: 453–457
- Cooper RA, Boninger ML, Chan L, et al. Manual wheelchair pushrim biomechanics and axle position. Archives of Physical Medicine and Rehabilitation, 2002; 81: 608–613
