Einleitung
Aktuell leiden in Deutschland mehr als eine Million Menschen an den Folgen eines Schlaganfalls 1. Angesichts des demografischen Wandels ist in den kommenden Jahren mit einem Anstieg der Gesamtzahl an Schlaganfällen zu rechnen 2. Dabei wird bei vielen Betroffenen die Selbstständigkeit im Alltag durch Folgeschäden eingeschränkt. Ein Beispiel hierfür sind Beinlähmungen, die meist als Halbseitenlähmung nach einem Schlaganfall auftreten. Abhängig von Ursachen und Schwere der Erkrankung erfolgt bei schlaganfallbedingter Beinlähmung möglichst früh eine Bewegungstherapie durch Physiotherapie im Liegen, im Gehen (ggf. entlastet auf dem Laufband) und zunehmend mit noch neuartigen motorgestützten Bewegungstherapieverfahren. Mit solchen Verfahren lässt sich die Trainingsintensität steigern und die Gehfähigkeit messbar schneller erreichen 3. Diese behandlungsintensiven Verfahren sind allerdings mit einem großen zeitlichen und monetären Aufwand verbunden und stellen daher eine große Belastung für den Patienten, sein persönliches Umfeld sowie das Gesundheitssystem dar. Aus diesem Grund ist ein System anzustreben, das die Rehabilitation beschleunigt und sich dabei in den Alltag integrieren lässt. Einen möglichen Ansatz zur Lösung dieser Problemkette stellen motorgestützte Orthesen dar, die mobile Übung und gleichzeitig gestützte Gehfähigkeit gestatten. Allerdings sind nach dem Stand der Technik derzeit auf dem Markt keine praktikablen, d. h. leichten und alltagstauglichen Produkte erhältlich, die dem Patienten hinreichend Komfort und Sicherheit vermitteln und damit für eine gezielte Therapieunterstützung geeignet sind 4 5.

Projekt RehaThese
Ziel des Forschungsprojekts „RehaThese“ (2015–2018), das vom Bundesministerium für Bildung und Forschung (Förderkennzeichen 16SV7179) gefördert wurde, war die Entwicklung eines ganzheitlichen Konzepts zur Realisierung einer adaptiven und individualisierbaren Orthese zur Gangrehabilitation nach Schlaganfällen, die aktiv gesteuert werden kann. Beim Gehen speichert die Orthese Bewegungsenergie und kann diese sensorgesteuert über die integrierte Aktorik wieder freigeben, sodass sie in bestimmten Phasen den Gang unterstützt.
Hinzu kam ein zweiter Aspekt: Die Telerehabilitation ist ein wichtiges Instrument, um bei gleichzeitigem Schwinden von Infrastrukturen (Ärzte, Therapeutendichte) und Anwachsen der Gruppe der Betroffenen eine adäquate Betreuung sicherzustellen. Daher kann die integrierte Sensorik der „RehaThese“ zusätzlich für ein sogenanntes Activity-Monitoring von Patientinnen und Patienten genutzt werden, die die Orthese verwenden, wobei allerdings Aspekte des Datenschutzes berücksichtigt werden müssen. Auf der Basis einer Analyse der während der Nutzung der Orthese ermittelten Bewegungs- und Belastungsmuster lassen sich auf diese Weise Therapien individualisieren und die Daten darüber hinaus zur Sturzerkennung mit anschließender Alarmauslösung nutzen. Sensordaten wie Lastwechselzählung, Zyklenzahl pro Tag, Schrittgeschwindigkeit, Stolperinzidenzen und veränderte Motorlast durch Muskeltonuszu- oder ‑abnahme können für das Activity-Monitoring genutzt werden. Auf diese Weise kann die Behandlungsintensität fallbasiert gesteuert und Sicherheit und Lebensqualität erheblich erhöht werden.
Methodik
Individualisierte Konstruktion
Die parametrische Basiskonstruktion der Orthese wird auf der Grundlage individueller, personenspezifischer anthropometrischer sowie biomechanischer Daten vorgenommen. Dazu wird sowohl die Körperoberfläche der unteren Extremitäten zur Anpassung der Orthesen-Oberflächen an den Körper herangezogen (3D-Lasermessung) als auch eine direkte Bewegungserfassung (Motion Capture) mit Kraftmessung (synchrone Kraftmessplattenmessung) vorgenommen. Damit sind die Stand- und Gangphasen inklusive des Abrollvorgangs des Fußes bis hin zum Abstoßen der Zehen zuverlässig identifiziert. Aus diesen Daten lassen sich die patientenindividuellen Gelenkpunkte inklusive der Kraft- und Momentenvektoren für unterschiedliche Bewegungszustände bestimmen. Zusammen mit einem initialen Designvorschlag werden diese Daten zur Entwicklung einer Plattform zur weiteren Herstellung individueller Orthesen genutzt.
Simulation zur individualisierten Auslegung des Gesamtsystems
Zur optimalen Auslegung der mit leichten Faserverbundmaterialien aufzubauenden Orthese werden simulationsgestützte Anpassungen durchgeführt. Die parametrisierte CAD-Basiskonstruktion der Orthese wird an die individuellen anthropometrischen Daten des jeweiligen Nutzers angepasst und bildet zusammen mit einem initialen Materialdesignvorschlag die Grundlage für ein patientenspezifisches Simulationsmodell der Orthese, das als virtueller Prototyp dient. Mit Hilfe einer dynamischen Finite-Elemente-Simulation, getrieben durch im Bewegungslabor erfasste biomechanische Daten, werden die während des Gehens mit der Orthese auftretenden Verformungen und Belastungen berechnet. Dies ermöglicht es, verschiedene Struktur- und Designvorschläge bereits vor ihrer Realisierung zu simulieren und zu evaluieren und dadurch Entwicklungszeit und ‑kosten deutlich zu senken. Auf die gleiche Weise wird die Auslegung der Aktorik durch Einbindung der Motorfunktion in das Simulationsmodell systematisch eingebunden.
Der Simulation folgt eine Validierung des modellierten Orthesenverhaltens durch Vergleich von im Labor gemessenen und mit der Simulation berechneten biomechanischen Daten, darunter die Druckverteilung zwischen Fuß und Orthese sowie die herrschenden Gelenkkräfte und ‑momente.
Gangphasen-Identifikation und Aktivitätserfassung
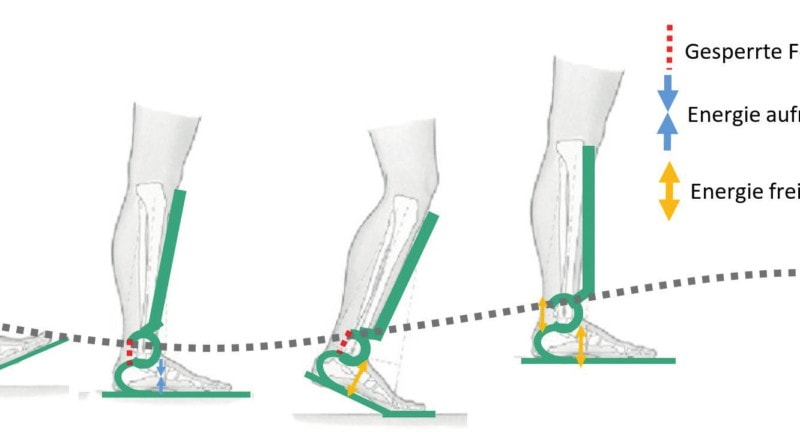
Mit Hilfe von Faserverbundmaterialien sollen Federstrukturen definierter Steifigkeit bzw. Elastizität ins Bauteil integriert werden. Die Federstrukturen der Orthese speichern die Bewegungsenergie in bestimmten Phasen des Gehens. Um die Bewegung zielgerichtet zu unterstützen, wird eine Aktorik eingesetzt, welche die Federenergie sensorgesteuert in den entsprechenden Gangphasen genau zum richtigen Zeitpunkt definiert freigibt (Abb. 1). Dies wird mit einem integrierten Schließmechanismus realisiert, der die elastisch vorgespannten Kompositstrukturen festhält und sie abhängig von der Gangphase gezielt wieder freigibt. Der Motor übernimmt somit lediglich eine Arretierungsfunktion und kann deshalb kompakt und leicht ausgeführt sein, da er nicht das Gewicht des Patienten inklusive der resultierenden Momente, sondern nur die Federspannung aufnehmen muss. Auf diese Weise lässt sich eine leichte, miniaturisierte und energieeffiziente Aktorik mit entsprechend kleinem Energiespeicher aufbauen. Es werden Drucksensoren in der Orthesensohle und Dehnmessstreifen an Federelementen in die Orthese integriert. Für Untersuchungen im Labor wird der Prototyp zusätzlich mit einem inertialen Messsystem (IMU) ausgestattet, das aus einer Kombination aus einem 3‑achsigen Beschleunigungssensor und einem 3‑achsigen Gyroskop besteht. Durch das Zusammenspiel verschiedener Sensordaten kann eine zuverlässige Erkennung der Gangphasen im Prototypen-Stadium erreicht werden.
Mechanische Testung der “RehaThese”
Für das Orthesensystem werden stützende Strukturen zur Lastaufnahme mit energiespeichernden Federstrukturen (einer „Doppel-C-Feder“) sowie hochflexiblen Abschnitten zur Adaption an den menschlichen Körper kombiniert. Auf diese Weise lässt sich durch eine sorgfältig gewählte Kombination aus unterschiedlichem Fasermaterial und einem unterschiedlichen Lagewinkel der Fasern einerseits sowie der Art und dem Anteil der Harzmenge andererseits eine große Variation der Elastizität innerhalb eines Werkstücks erzielen.
Aufgrund der vorgesehenen Anwendung müssen Konzepte entwickelt werden, die eine hohe Zyklenzahl, eine hinreichende Dynamik und eine präzise Steuerung sicherstellen. Der mechanische Aufbau inklusive Federsystem darf den Motor in keiner Betriebssituation überlasten. Dies muss in der gesamten Systemauslegung inklusive der Faserverbundstruktur berücksichtigt werden.
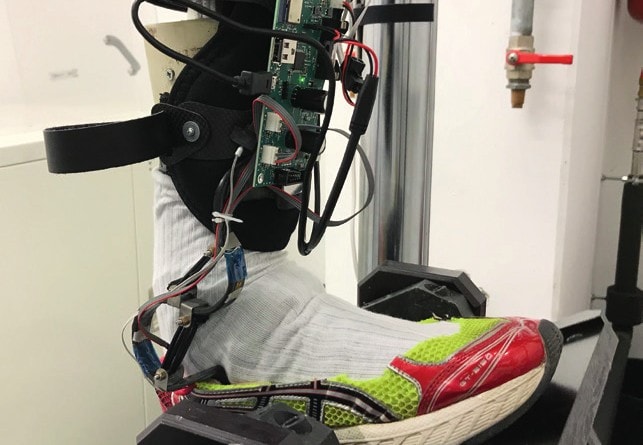
Mit Hilfe einer modifizierten Prothesenprüfmaschine (KS 2–07, Shore Western, Monrovia, Kalifornien, USA), angelehnt an die Prüfnorm ISO 22675, wird das Verhalten verschiedener Entwicklungsmuster evaluiert (Abb. 2). Über ein künstliches Fußmodell wird der Orthesen-Prototyp aufgenommen. Anschließend wird der Prüfling über einen Hubzylinder in Kombination mit einem schwenkbaren Untergrund mechanisch mit einer Spitzenlast von 824 N und Winkeln zwischen ‑20° und +40° dynamisch und statisch belastet. Durch den Testaufbau können sowohl isolierte Bewegungen (beispielsweise initialer Fersenkontakt und Abstoßbewegungen) als auch der vollständige Abrollvorgang der Standphase abgebildet werden. Die Standphasendauer für den dynamischen Test beträgt 600 ms (Frequenz 1 Hz), was in etwa einer durchschnittlichen Standphasendauer beim normalen, gesunden Gehen entspricht.
Durch die mechanische Testung konnte sowohl die Funktionsweise von Sensorik und Aktorik basierend auf wiederholbaren Bewegungen getestet als auch eine Strukturanalyseder Grenz- und Dauerlauffestigkeit durchgeführt werden. So konnte das Verhalten der „RehaThese“ mittels Hochgeschwindigkeitskameraaufnahmen exakt analysiert und beurteilt werden. Ziel des Versuchs war die Generierung von Basisdaten zur Überprüfung der Gangphasenerkennung durch DMS-Sensoren der „RehaThese“. Durch den gleichmäßigen Ablauf der simulierten Gangbewegung an der Testmaschine kann die Signalqualität über einen längeren Zeitraum überprüft werden.
Ergebnisse
Die Ergebnisse des mechanischen Tests zeigten, dass beim Anheben des Fußes (Ende der Standphase) die Fußheberorthese den Testfuß wieder in die Neutralstellung zurückführt. Dadurch kann die Hauptfunktionalität des Prototyps verifiziert werden. Eine Analyse des Verfahrweges zeigte ein konstantes mechanisches Verhalten der Orthesen-Prototypen über den gesamten Messzeitraum von rund 1.500 Zyklen.
Ferner zeigten die Ergebnisse, dass die Signale der DMS-Sensoren über den gesamten Testzeitraum eine hohe Reproduzierbarkeit aufwiesen: Es war keine Langzeit-Drift der Daten mit fortlaufender Messdauer festzustellen. Aus den Testergebnissen wurden Vorschläge und Optimierungspotenziale abgeleitet, die beim Aufbau der nächsten Prototypen miteinbezogen werden.
Biomechanische Testung der “RehaThese”
Ein erster Probandenversuch diente als Pilotversuch zur Funktionsüberprüfung der Sensorik (Abb. 3). Die Erfassung der kinematischen Daten erfolgte mit 14 IR-Kameras (Qualisys QTM, Qualisys AB, Göteborg, Schweden) und einem Markersetup mit passiv-reflektierenden Markern („LowerBody“-Marker-Set). Zusätzlich wurden die Bewegungsdaten der unteren Extremitäten mit dem System „Xsens Awinda“ (Xsens Technologies, Enschede, Niederlande) aufgezeichnet. Dies bietet die Möglichkeit, Rohdaten der IMU-Sensoren mit den Sensordaten des Orthesen-Prototyps zur vergleichen, was für die Algorithmen-Entwicklung und zur Validierung der Sensordaten genutzt wird. Die Bodenreaktionskräfte wurden mit vier Kraftmessplatten erfasst (AMTI-AccuGait). Der Versuch wurde auf einer ebenen Gangstrecke im Labor (maximale Länge 12 m, Bodenbelag Linodur) bei einem gesunden Probanden mit nichtpathologischem Gangbild durchgeführt. Der Proband trug dabei eine Unterschenkelorthese und simulierte verschiedene Gangmuster und Einschränkungen im Gangbild (Geschwindigkeit, Hinken, Timedup-and-go-Test). Die Daten wurden mit der Biomechanik-Software „Visual3D“ (C‑Motion, Germantown, Maryland, USA) zur Berechnung der Gangphasen-Parameter, der Gelenkwinkel und der Gelenkmomente der unteren Extremitäten verarbeitet und exportiert.
Ergebnisse
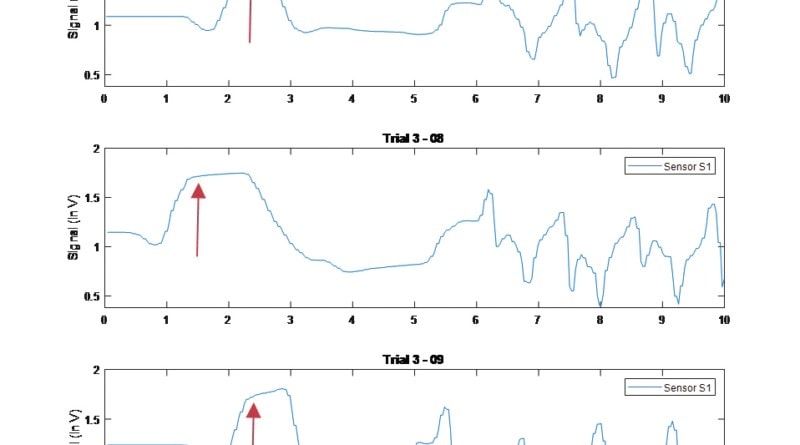
Durch die Analyse des DMS-Signals konnten verschiedene Aktivitätszustände identifiziert werden, beispielsweise das Aufstehen aus einer sitzenden Position (Abb. 4, roter Pfeil) sowie darauffolgende Gehschritte. Trotz der individuellen Ausprägung ist innerhalb jedes Testdurchlaufes ein wiederkehrendes Muster mit entsprechenden Hoch- und Tiefpunkten im Sensorsignal der „RehaThese“ zu erkennen. Zusammen mit Informationen der Fußtaster an der Unterseite der Orthese ist eine ausreichende Datenmenge für die Entwicklung von Algorithmen zur Mustererkennung unterschiedlicher Bewegungszustände gegeben. Zusätzlich wurden klinische Daten von Patienten beim Projektpartner Schön Klinik Bad Aibling erhoben. Dabei wurde der Prototyp im Sinne einer Funktions- und Anwendbarkeitsprüfung an Probanden im Einzelfall erprobt und die Ergebnisse verglichen.
Fazit
Durch die hier vorgestellte Forschungsarbeit konnte gezeigt werden, dass personalisierte aktive Orthesen für die untere Extremität sowohl zur individuellen Gangrehabilitation als auch für ein Patienten-Monitoring genutzt werden können. Dabei wurde ein ganzheitliches Orthesenkonzept für eine neuartige Fußheberorthese entwickelt, das eine Steuerung der Energiefreigabe passiver CFK-Strukturen im Gangzyklus und zugleich eine Datenanalyse für Therapeut und Patient ermöglicht. Die Grundlagenentwicklung der „RehaThese“ ist inzwischen abgeschlossen. In Teilbereichen wie z. B. der Sensorik und der Algorithmen zur Gangphasen-Erkennung konnte die Funktionalität bei einer größeren Probandenanzahl noch nicht getestet werden. Hier sind bei einer Weiterführung des Projektes noch Arbeiten zu leisten, um Wirksamkeit und Sicherheit der „RehaThese“ in einer größeren klinischen Studie zu überprüfen. Unter anderem muss das Gewicht des Gesamtsystems reduziert werden, um den Prototypenstatus in ein marktreifes Produkt zu überführen.
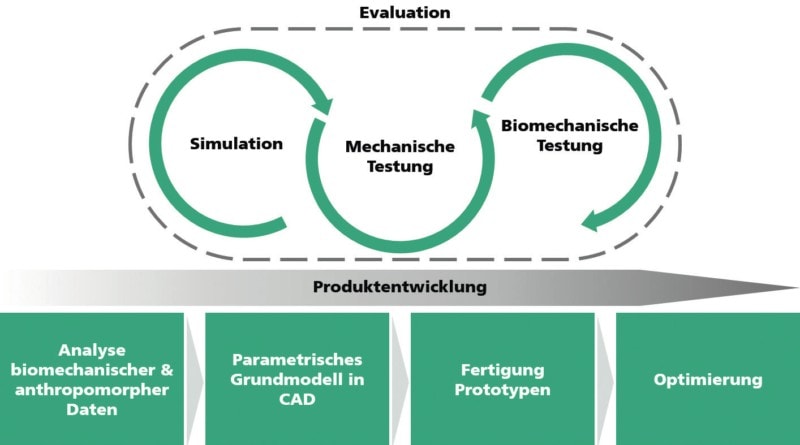
Ferner kann der ganzheitliche Konzeptansatz einer personalisierbaren Orthese und die erarbeiteten Prozesse als Basis für die weitere Forschung und Entwicklung am Körper getragener Systeme wie beispielsweise Orthesen, Prothesen und Exoskelette im wissenschaftlichen Rahmen genutzt werden (Abb. 5). Basierend auf patientenspezifischen biomechanischen und anthropomorphen Daten wird dazu zunächst ein parametrisches Grundmodell in CAD entwickelt. Mittels FEM-Simulation können sodann verschiedene Konzepte vor der Fertigung von Prototypen evaluiert werden. Anschließend werden Prototypen auf der Grundlage experimenteller Untersuchungen (mechanische und biomechanische Testung) in iterativen Schritten optimiert. Die simulationsgestützte Evaluation kann Teil der personalisierten Produktherstellung sein; die maschinelle Testung jedoch wird nicht bei jedem einzelnen Produkt stattfinden. Voraussetzung dafür ist eine ausreichende experimentelle Datengrundlage aus mechanischer und biomechanischer Testung, sodass die Evaluation über digitale Prozesse abgebildet werden kann. Für die finale Produktionsplattform zur Herstellung individueller Orthesen muss ein simulationsgestützter Prozess etabliert werden.
Hinweis
Das hier vorgestellte Forschungs- und Entwicklungsprojekt wurde mit Mitteln des Bundesministeriums für Bildung und Forschung (Förderkennzeichen 16SV7179) gefördert und vom Projektträger VDI/VDE Innovation + Technik GmbH betreut. Projektpartner waren die Schön Klinik Bad Aibling GmbH & Co. KG (Prien am Chiemsee), die TRINAMIC Motion Control GmbH & Co. KG (Hamburg), die Tellur Gesellschaft für Telekommunikation mbH (Stuttgart) sowie die CarboFibretec GmbH (Friedrichshafen).
Für die Autoren:
Philip Czapka M. Sc.
Wissenschaftlicher Mitarbeiter und Projektleiter
Fraunhofer IPA, Abt. Biomechatronische Systeme
Nobelstr. 12
70569 Stuttgart
philip.czapka@ipa.fraunhofer.de
Begutachteter Beitrag/reviewed paper
Czapka P, Blab F, Schneider U. Ganzheitliches Konzept zur Entwicklung individueller und adaptiver Orthesen zur Gangrehabilitation-„RehaThese“. Orthopädie Technik, 2020; 71 (4): S. 53 — 56



- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Robert Koch-Institut (Hrsg.). Gesundheit in Deutschland (Gesundheitsberichterstattung des Bundes). Berlin: Robert Koch-Institut, 2006. http://www.gbe-bund.de/pdf/GESBER2006.pdf (Zugriff am 12.03.2020)
- Robert Koch-Institut (Hrsg.). Daten und Fakten: Ergebnisse der Studie „Gesundheit in Deutschland aktuell 2010“. Berlin: Robert Koch-Institut, 2012. https://edoc.rki.de/handle/176904/3237 (Zugriff am 12.03.2020)
- Werner C, Pohl M, Holzgraefe M, Kroczek G, Mehrholz J, Wingendorf I, Hölig G, Koch R, Hesse S. Lokomotionstherapie des akuten Schlaganfallpatienten: Ergebnisse der multizentrischen Deutschen Gangtrainer Studie (DEGAS). Neurologie & Rehabilitation, 2006; 12 (5): 262–269
- Blab F. RehaThese: Forschungsansatz für die Entwicklung personalisierter und anpassbarer Orthesen für die unteren Extremitäten. Kongressvortrag OTWorld, Leipzig, 2018
- Blab F, Starker F, Czapka P, Rogge T. KMU-innovativ – Verbundprojekt: „RehaThese“: Abschlussbericht 2018, FK: 16SV7179. https://doi.org/10.2314/KXP:1667308645 (Zugriff am 28.02.2020)
