Einleitung
Eine krankhafte Spitzfußstellung kann sich aus verschiedenen Ursachen entwickeln, die entweder angeboren sein können (z. B. bei einer Zerebralarese) oder sich aus anderen neuromuskulären Erkrankungen ergeben. Als tradierter Versorgungsansatz werden eine Blockade der Plantarflexion und als Indikation zur Therapiewahl eine ungenügende Dorsalflexion im oberen Sprunggelenk verwendet 1. Der Kern dieses Ansatzes besteht darin, über die Vermeidung unerwünschter Gelenkstellungen und die Rückführung des Fußes in die Neutralstellung durch die Körperlast eine Dehnung der Plantarflexoren und der Achillessehne zu bewirken 2 3. Die bisher in der Standardversorgung verwendeten Unterschenkelorthesen, sogenannte AFOs (Ankle-Foot Orthoses; Sprunggelenk-Fuß-Orthesen), gibt es mit starrer Geometrie oder auch in einer Kombination von Gelenkmechanik und plantarem Anschlag. In den letzten Jahren kamen auch AFOs mit dorsaler Feder parallel zur Achillessehne hinzu 4. Alle drei Orthesentypen erzielen die von Hösl 5 beschriebene Dehnung und senken durch die geänderte Fußstellung die Ferse zum Boden 6. Sie werden unter einem Versorgungsansatz zusammengefasst, der in diesem Beitrag zur einfacheren Unterscheidung als „klassische Versorgung“ bezeichnet wird. Ziel dieses Artikels ist es, die Diskussion über einen Paradigmenwechsel in der neuromuskulären Beinorthetik zu fördern. Die Forschungsfrage in diesem Zusammenhang lautet: Inwiefern kann eine Unterschenkelorthese die Kräftedynamik des Gehens zum Vorteil des Patienten nutzen?

Die meisten neurogenen Patienten verfügen über ein gewisses Kraftpotenzial, das genutzt und gefördert werden sollte. Ohne eine solche Förderung besteht die Gefahr, durch die Stützungsfunktion und die eventuelle Positionsfixierung einer Orthese die körpereigenen Kraftpotenziale zu vernachlässigen. Einige klinische Studien, die im Folgenden ausgewertet werden, belegen bereits, dass verschiedene Orthesentypen unterschiedliche Auswirkungen auf Muskeln, Faszien und Sehnen haben. Der Artikel diskutiert die bestehenden Studienergebnisse und fügt neue Erkenntnisse aus dem Versorgungskonzept der Autoren hinzu, indem ein dynamisches Unterschenkelorthesen-Design vorgestellt wird.
Forschungsüberblick
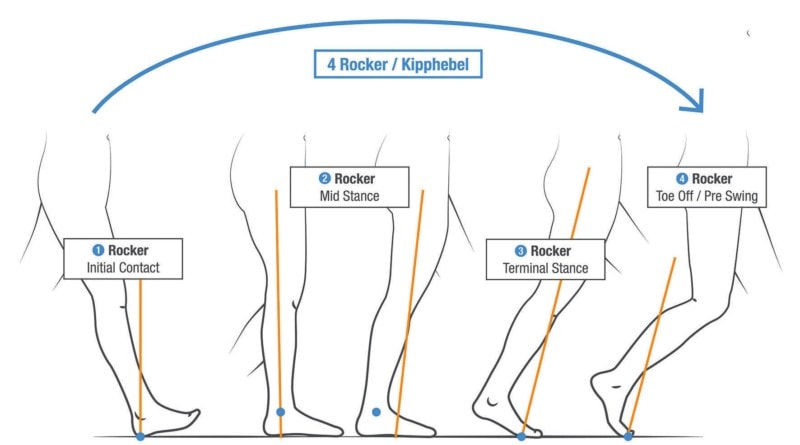
Im Jahr 2006 führten Romkes et al. 7 an der Uniklinik Basel vergleichende Ganganalysen durch. Dabei maßen sie elektromyographisch die Muskelaktivität des M. tibialis anterior beim Tragen einer sogenannten klassischen Orthese mit Gelenk und plantarem Anschlag. Die Orthese reduzierte die Muskelaktivität gegen über dem Barfußgehen bei wichtigen Abrollbewegungen wie dem Fersenauftritt, dem „initial contact“ (IC), um 36 % und bei „toe off“ um 57 %. Abbildung 1 vermittelt eine Übersicht über die verschiedenen Abrollbewegungen, auch „Rocker“ genannt.
Bereits 2004 beschäftigten sich Cathleen Buckon und Team 8 mit Kindern mit spastischer Diplegie. In ihrer Studie untersuchten sie, welche kinetischen und kinematischen Veränderungen drei klassische Orthesendesigns erzielen. Das Ergebnis: Alle Orthesen verhinderten die unerwünschte Plantarflexion, boten funktionale Verbesserungen in der Gehmotorik und reduzierten auch den Energieverbrauch beim Gehen. Allerdings waren die Verbesserungen nicht ausreichend, um in Alltags- und Spielsituationen mit gesunden Kindern besser motorisch mithalten zu können: Konstruktionsseitig behinderten die getesteten AFOs die Funktion des 3. Rockers in „terminal stance“ (Abb. 1) 9. Ohne den 3. Rocker bleibt die Kraftentfaltung durch eine kontrollierte Plantarflexion beim Abdruck des Fußes über den Ballen aus. Schon ohne Orthese erreichten die Patienten in der Studie von Buckon et al. nur noch 45 % der für Gesunde normalen Kraftleistung am Sprunggelenk. Gemessen wurde dabei die Leistungserzeugung in Watt pro Kilogramm Körpergewicht. Mit Orthese und damit ausbleibender Kraftentfaltung wurden noch weitere Reduktionen gemessen: Die Leistungserzeugung am Sprunggelenk fiel auf 35 % des Normalwertes bei der Orthese mit dorsaler Feder und auf 34 % bei der AFO mit Gelenk und Plantaranschlag. Bei steifer AFO ging die Leistungserzeugung sogar auf 24 % zurück. Hieraus schließen die Autoren, dass sich die muskuläre Aktivierung beim Gehen mit diesen Orthesentypen reduziert.
Eine jüngere Studie von Hösl 10 aus dem Jahr 2015 berichtet ebenfalls von Veränderungen in der Muskulatur. Dabei wurden 17 Kinder mit Zerebralparese vor und nach einer 16-wöchigen Behandlung mit einer AFO mit Gelenk und Plantaranschlag untersucht. Alle Messungen erfolgten relativ zu einer Vergleichsgruppe gesunder Kinder gleicher Zahl und gleichen Alters. Mit der Orthese konnten die Kinder ihren Gang beschleunigen und auch andere funktionale Parameter verbessern. Es verstärkten sich allerdings einige – bereits durch die Erkrankung manifestierte – muskuläre Verkürzungen während der Orthesenversorgung noch weiter: Im Vergleich zum Zustand bei Studienbeginn wurden bei den orthetisch versorgten Kindern die Faszikel des M. gastrocnemius relativ zu den gesunden Kindern um weitere 11 % verkürzt und das Muskelvolumen um weitere 8 % reduziert.
Insgesamt – so zeigen diese Beispielstudien – profitieren die meisten Patienten zwar funktionell von der Versorgung durch klassische Orthesen; so wird die beim spastischen Spitzfuß im Vordergrund stehende passive Dehnfähigkeit und die erforderliche ROM (Range of Motion) erreicht und die Achillessehne dabei auch verlängert. Doch schon die zitierten Beispielstudien verdeutlichen die möglichen Nachteile einer orthetischen Versorgung mit einer Begrenzung der Sprunggelenkbewegung 11: Es reduzieren sich die Kräfte, die beim Gehen zwischen Teilen des Bewegungsapparates und dem Boden erzeugt werden. Als Folge daraus stellen sich weitere Schwächungen und Verkürzungen in der Muskulatur ein 12.
Im Jahr 2010 beschrieb Döderlein, dass die Muskelkraft in den meisten neuromuskulären Erkrankungen reduziert ist 13. In der Konsequenz hält er es für notwendig, dass therapeutische Maßnahmen, die eine zusätzliche Schwächung der funktionierenden Muskeln beinhalten, kritisch hinterfragt werden müssen.
Angesichts dieser Erkenntnisse wurde ein alternatives Orthesenkonzept entwickelt, mit dem eine Einschränkung der Bewegungsmöglichkeiten durch feste Anschläge vermieden und der Kraft- und Energiefluss im Gangablauf gefördert wird. Wenn die Kraftpotenziale des Patienten nicht sukzessive verloren gehen sollen, müssen sie genutzt werden. Dieses Konzept wird im Rahmen des Artikels vorgestellt, zudem werden die Ergebnisse einer Pilotstudie zur Wirksamkeit der Orthese vermittelt. Zuvor wird jedoch noch auf einige biomechanische Grundsätze des Gehens eingegangen.
Biomechanik des Gehens
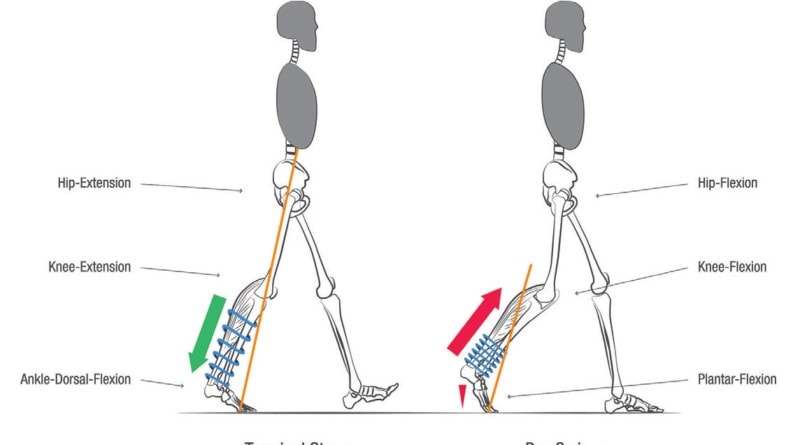
Allgemeine biomechanische Grundlagen des Gehens sind wichtige Voraussetzungen zum Verständnis des hier vorgestellten alternativen Orthesenprinzips. Im gesunden Gangbild wird der Körper beim Gehen über den Fuß als feste Basis hinwegbewegt. Dabei werden in den Standphasen vier Rocker für die Fortbewegung ausgenutzt 14. Bei jedem Rocker erfolgt ein Abrollen bzw. eine Winkelveränderung über einen feststehenden Drehpunkt. Dabei wird der Körper über ein Drehmoment, das am Drehpunkt des Rockers ansetzt, nach vorwärts hinwegbewegt. Die Biomechanik beim Gehen ist aber nicht nur von der aktiven Muskulatur abhängig, sondern auch von den passiven Strukturen, hauptsächlich von den Sehnen und zum Teil auch vom Bindegewebe, das Muskel und Sehne umschließt. In Hills elastischem Muskelmodell der Wade (Abb. 2) 15 werden drei Elemente beschrieben, die zusammen die biomechanischen Kräfte generieren: Eine aktive Kraft entsteht aus dem kontrahierenden Muskel, dem „contractile element“. Zwei passive Kräfte werden aus dem elastischen Widerstand zweier nichtlinearer Elemente erzeugt. Dies sind die zum Muskel in Reihe geschaltete Sehne einerseits und das parallel dazu verlaufende Bindegewebe andererseits. Dem Modell folgend kontrahiert der Wadenmuskel nicht primär, um das Sprunggelenk zu strecken oder zu beugen, sondern arbeitet isometrisch, um zusammen mit der Vorwärtsbeugung des Schienbeins während der mittleren Standphase in der Muskel-Sehnen-Bindegewebe-Einheit eine Spannung zu erzeugen. Gegen den Zug des Wadenmuskels baut sich also eine passive Dehnungsresistenz in Sehne und Bindegewebe in entgegengesetzter Richtung auf (grüner Pfeil in Abb. 3) und speichert so die Fähigkeit, Arbeit zu verrichten, also Energie. Wenn sich der Schwerpunkt des Körpers über einen stabil stehenden Fuß (Fußhebel) hinweg weiter nach vorne bewegt, wird durch die verlagerte Gewichtskraft die Spannung noch weiter vergrößert (Abb. 3 links).
Jegliches seitliches Abweichen des Fußes und jede Inversion der Beinachse würde die Stabilität zerstören, die notwendig ist, um die Spannung in der Muskel-Sehnen-Einheit aufzubauen. Ohne Stabilität und Spannung gäbe es auch keine Drehmomente an den Rocker-Drehpunkten, die die „vorgespeicherte“ Spannungsenergie während der terminalen Standphase des Fußes in Bewegungsenergie umwandeln – Energie ginge verloren und müsste durch zusätzliche Muskelarbeit wiederhergestellt werden. Die Bedeutung eines stabilen Fußhebels für die Energieprozesse belegen die Arbeiten von Fukunaga 16. Wie sich die aufgebaute Vorspannung, quasi eine potenzielle Energie, katapultartig in Bewegungsenergie umwandelt (roter Pfeil in Abb. 3), wurde von Meinders erklärt: Die Hauptfunktion der Plantarflexoren ist die Auslösung der Beschleunigung des Schwungbeines während des „toe off“ 17. Aufgrund der ökonomischen Umwandlung von Energie maß Fukunaga nur eine geringe metabolische Arbeit, um die kontraktilen Kräfte hervorzurufen, die den Körper bewegen 18. Bei neuromotorischen Erkrankungen ist diese Umwandlung gehemmt. Die fehlende Energie zur Vorwärtsbewegung des Beines aus der Wadenmuskulatur muss kompensatorisch aus der Hüftbeugung neu erzeugt werden, was zu einem pathologischen Gangmuster führt 19.
Bei jedem Schritt bleiben etwa 90 % der kinetischen und potenziellen Gesamtenergie unseres Körpers erhalten 20. Voraussetzung für diese Energieerhaltung ist, dass der Gang gleichförmig und fließend ist. Die Energie, die im Schwung des Beines enthalten ist, wird effizient in die Spannungsenergie des nächsten Gangzyklus umgewandelt – umso mehr, je größer die Schrittlänge ist und je weiter sich dadurch der Körper über den feststehenden Fuß fortbewegt und je mehr sich das dorsale Muskel-Sehnen-System des gesamten Standbeines dabei spannt. In der frühen Standphase sollte eine möglichst verlustarme, wenig dämpfende Fortbewegung des Beines über die Fersenabrollung beim Fersenauftritt erfolgen. Die entlang der Sagittalebene gespreizten Beine sowie die leichten Dämpfungsmechanismen der kurzen Knieflexion und der Eversion im unteren Sprunggelenk führen zu einem Absinken des Körperschwerpunktes. Dieser wird dann ab dem Ende der kurzen Knieflexion in der leichten Stoßdämpfungsphase über das Drehmoment, das am Abrollpunkt der Ferse ansetzt, wieder nach vorne und oben gedrückt, bis der Körperschwerpunkt laut Winter 21 in der mittleren Standphase die maximale Höhe erreicht. Während dieses Prozesses hat sich die Vorwärtsgeschwindigkeit des Torsos leicht verlangsamt, weil kinetische in potenzielle Energie umgewandelt wurde. Danach fällt der Körperschwerpunkt nach vorne und unten, bis er von Neuem – diesmal auf der anderen Körperseite – nach dem Zeitpunkt des Fersenkontakts und der folgenden Dämpfung wieder die niedrigste Höhe erreicht 22. Potenzielle Energie wandelt sich zurück in kinetische Energie. Sowohl die Spannungsenergie in der Muskel-Sehnen-Einheit als auch die potenzielle Energie des Körperschwerpunktes stammen zu einem großen Teil aus dem vorangegangenen Schrittzyklus. Die besonderen elastischen Eigenschaften der Muskel-Sehnen-Einheit der Wade ermöglichen eine große Beinbeschleunigung und damit auch eine lange Schrittlänge, die für einen korrekten Fersenauftritt ausreicht. Für einen kräftesparenden Gang ist die hohe Energieerhaltung und die alternierende Energieumwandlung von zentraler Bedeutung, damit der Körper mit minimalem Aufwand bewegt werden kann 23 24 25. Diese Folgerungen werden durch Ergebnisse unterstützt, die zeigen, dass die Unterschenkelmuskulatur mit 57 % mehr als die Hälfte der Arbeit leistet, die erforderlich ist, um den Körper beim normalen Gehen horizontal zu bewegen 26.
Einführung eines alternativen und dynamischen Orthesenkonzepts
Eine große Schrittlänge und die Fähigkeit zur Speicherung und Umwandlung von Energie sind also entscheidend für einen physiologischen Gangablauf. Bei Patienten mit neuromuskulären Erkrankungen treten häufig biomechanische Instabilitäten auf, die den Energiefluss unterbrechen. Raschere Ermüdung und kürzere Gehstrecken sind die Folge. Kinetische Energie der Schwungphase, die ab dem Fersenkontakt nicht erhalten bleibt und ab der mittleren Standphase nicht in Spannungsenergie und potenzielle Energie umgewandelt wird, ist für den Bewegungsablauf verloren und erfordert zusätzliche Muskelarbeit. Diese Erkenntnisse wurden in dem alternativen Orthesenkonzept „adV Power-Spring® Spiralorthese“, einer dynamischen AFO mit spiralförmig verlaufender Carbonfeder, berücksichtigt (Abb. 4). Der Fuß wird dabei mittels einer zirkulären Fußfassung in kontrollierbarer Stellung gehalten, ohne die Bewegungsfreiheiten des oberen Sprunggelenkes einzuschränken. Die dynamisch-sensomotorische Steuerung der Schrittabwicklung erfolgt so, dass die Abrollbewegungen gegenüber dem Barfußgehen verstärkt werden. Wie weiter oben beschrieben kann die Schrittlänge als direkt messbarer Parameter für ein effizienteres Gangbild herangezogen werden.
Pilotstudie
Methode/Studiendesign
Um die Forschungsfrage „Inwiefern kann eine Unterschenkelorthese die Kräftedynamik des Gehens zum Vorteil des Patienten nutzen?“ zu beantworten, wurde in einer Pilotstudie mit dem Analyseprogramm „Contemplas“ das Gangprofil von 34 Kindern videogestützt untersucht (16 weiblich, 18 männlich; Alter: 2 bis 15 Jahre mit Durchschnittsalter 7,12 Jahre, Standardabweichung 3,2 Jahre). Alle Kinder waren Patienten mit unilateraler Zerebralparese (GMFCS 1/2). Verglichen wurde die Schrittlänge von der Zehenspitze des gesunden Beines bis zur Fersenrückseite beim Fersenauftritt der betroffenen Seite – zum einen barfuß und zum anderen mit der Powerspring-Orthese. Die Messungen erfolgten innerhalb von 10 bis 20 Minuten nach Anprobe der Orthese.
Ergebnisse
Mit Orthese konnte im gesamten Durchschnitt eine Verlängerung der Schrittlänge um 18,92 % (Standardabweichung 7,34 %) beobachtet werden. 25 Kinder erreichten eine Verlängerung zwischen 12 % und 25 %, 5 Kinder sogar über 25 %. Die niedrigsten Verlängerungswerte im Bereich von 5 bis 10 % gab es bei 3 Kindern. Nur bei einem Kind ergab sich eine Verkürzung der Schrittlänge von ‑5 %. Im Video war bei den zuletzt genannten 4 Kindern mit schwacher Verlängerung bzw. Verkürzung der Schrittlänge ein noch nicht umgestelltes Gangbild zu erkennen. Das Gehen mit der Orthese war bei diesen 4 Kindern möglicherweise noch nicht komplett erlernt.
Zusätzlich wurde in der Studie der IC („initial contact“) beurteilt. Als Referenzpunkt diente der normgerechte Bodenkontakt, bei dem der Fuß im IC in einem Winkel zum Unterschenkel von 90° mit der Ferse zuerst auf den Boden aufsetzt und danach kontrolliert plantarflektiert den Vorfußkontakt mit dem Boden herstellt. Im Vergleich zum Referenzpunkt ergaben sich ohne Orthese ausschließlich zwei Typen nichtphysiologischer Bodenkontakte:
– 23 Kinder (68 %) zeigten einen Auftritt mit dem Vorfuß; – 11 Kinder (32 %) zeigten einen abgeflachten Auftritt mit dem gesamten Fuß.
Das heißt, ohne Orthese war keines der Kinder in der Lage, den Fuß physiologisch normgerecht über die Ferse aufzusetzen. Mit der Powerspring Orthese dagegen bewerkstelligten 32 Kinder (94 %) einen korrekten Fersenauftritt über den Fersenrocker. Nur noch bei 2 Kindern (6 %) beobachteten die Autoren einen nichtphysiologischen Auftritt mit dem gesamten Fuß.
Das Resultat der größeren Schrittlänge und des gangphysiologisch wichtigen Fersenauftrittes erklärt sich als Folge des Orthesendesigns. Denn in Analogie zum Muskel-Sehnen-Modell nach Hill wird hier ein zusätzliches parallel elastisches Element hinzugefügt: eine Carbonfeder. Sie unterstützt und komplettiert den Spannungsaufbau der neuromotorisch geschwächten dorsalen Beinmuskulatur.
Das hier vorgestellte dynamische Orthesendesign weist damit zwei Verbesserungen auf:
- Eine größere Speicherung an Spannungsenergie erzeugt eine ausgeprägte Beinschwungphase mit größerer Schrittlänge und einem korrekten Fersenauftritt, der wichtig ist für die Energieumwandlung.
- Durch mehr Zugspannung im Gesamtsystem, also Orthese plus Muskel-Sehnen-Einheit, wirken stärkere Kräfte auf die Beinmuskulatur, die dadurch potenziell gezielt angesteuert und trainiert wird. Damit wird möglicherweise auch ein Muskelaufbau wieder möglich.
Der Spannungsaufbau erfolgt, indem die spiralförmige Feder sich zwischen der ventralen Anlage am Tibiakopf und der langen Carbonsohle unter Zug ausdehnt (Abb. 3). Besonders die Anlage am Tibiakopf erleichtert durch den Hebeleffekt der stärkeren Schienbein-Vorlage, dass mehr Zug an der Feder anliegt. Dieses Prinzip bringt zuxes Zusammenspiel zwischen Muskeln und Sehnen nötig, damit natürliche Spannkraft aufgebaut werden kann 27 28. Wenn die Sehnen überdehnt oder verkürzt und steif sind, kann ein Muskel keine Kraft erzeugen. Zusätzlich sichert die Spiralität der Feder und der seitliche Ansatz an eine von unten leicht stabilisierende Carbonfußplatte auch den ansonsten instabilen spastischen Fuß. Der Patient bzw. die Patientin kann die Fußbewegung besser kontrollieren, und die Fußstabilisierung ermöglicht die für den Spannungsaufbau wichtige Verlagerung des Körperschwerpunktes nach vorne. Die definierte, an den Patienten angepasste Steifigkeit der Feder wird materialseitig durch individuelle Armierung der Carbonfasern erzielt.
Aus den geschilderten Designelementen der vorgestellten Orthese geht hervor, dass das dynamische Orthesenkonzept nicht primär den Ansatz verfolgt, die Plantarflexoren und die Achillessehne zu dehnen und den Fuß in der Schwungphase passiv anzuheben. Erst wenn die durch Spannungsenergie erzeugten Drehmomente an den jeweiligen Rockern bei Standphasenende und Zehenablösung ansetzen, wird katapultartig ein langer Beinschwung ausgelöst. Dies triggert auch die Fußhebemuskulatur, die auf diese Weise einen normgerechten Bodenauftritt über die Ferse vorbereitet. Der alternative Ansatz lässt Patienten mit Pes equinus einen dynamischen Gangablauf mit Spannungsaufbau und fließenden Energieumwandlungen entwickeln. Mit mehr Energie in der Gesamteinheit Fuß/Orthese laufen Patienten leichter, flüssiger, schneller und weiter, was ihnen eine bessere Partizipation in sozialen Alltagssituationen ermöglichen könnte. Die stabilisierende Sicherheit der PowerspringOrthese und die potenzielle Aktivierung der Muskulatur machen diese AFO zum therapeutischen Übungsgerät für das Gangtraining. Funktionale Verbesserungen werden auch mit klassischen Orthesen erreicht, jedoch gilt es nun mit Versorgungskonzepten, die auch Muskeln, Sehnen und neuronale Strukturen trainieren, einen Paradigmenwechsel einzuleiten.
Klinische Relevanz
Das hier vorgestellte orthetische Versorgungskonzept bietet Kindern mit Zerebralparese das Potenzial für ein energieeffizienteres Gehen mit längeren und schnelleren Gehstrecken, was ihnen eine bessere Partizipation in sozialen Alltagssituationen erlauben würde. Gleichzeitig gibt es Anzeichen, dass das neue Design für einen neuromotorischen Trainingseffekt sorgt, der die körpereigenen Kraftpotenziale nutzt und fördert und auf diese Weise – so die Hypothese der Autoren – weiteren Verkürzungen und Schwächungen der Muskulatur entgegenwirken könnte.
Limitationen
Die individuelle Anfertigung der Orthesen begrenzt die Übertragbarkeit und Nachvollziehbarkeit der Ergebnisse, da der Aufbau der Orthesen auf den internen Erfahrungen der Werkstatt basiert und die Algorithmen zur Berechnung der Federstärke (Armierung) einen signifikanten Teil des Konzeptes darstellen. Die dokumentierten Versorgungen berücksichtigen nur Patienten mit GMFCS Level 1 und 2. Schwerer betroffene Kinder erfordern eine differenziertere Betrachtung. Limitierend ist zudem, dass die Autoren bei dieser retrospektiven Studie nicht auf die Eingangsmuskelkraft eingegangen sind. Dies wäre sicherlich ein wichtiger Untersuchungsansatz für weitere Studien. Ebenso steht ein Vergleich mit anderen dynamischen Orthesenkonzepten (z. B. hintere Carbonfeder oder Multifunktionsgelenke) noch aus.
Wie und wann sollte eine orthetische Versorgung erfolgen?
In der Fachwelt gilt es als akzeptiert, dass Haltung und Muskulatur gerade bei neuromuskulären Erkrankungen trainiert werden müssen. Selbst wenn sich das zeitliche Erreichen motorischer Entwicklungsstadien je nach Krankheitsausprägung unterscheidet (Abb. 5), so findet der größte und schnellste Teil dieser Entwicklung in allen Fällen in den ersten 4 bis 5 Lebensjahren statt 29. In jungen Jahren profitieren betroffene Kinder somit am meisten vom Trainingseffekt einer dynamischen Orthese: Sie unterstützt den physiologisch-dynamischen Bewegungsablauf, trainiert das Gangmuster und erreicht dadurch im besten Fall eine bessere Muskelbalance und eine Kräftigung durch Verlängerung von Wegstrecken. Dabei ist zu berücksichtigen, dass die Entwicklung der wichtigsten knöchernen Strukturen mit 12 Jahren abgeschlossen ist 30. Jetzt haben die Knochen die Form erreicht, die der biomechanischen Funktion folgt, die sie in der Vergangenheit übernommenen haben. Die Deformierung von Skelettabschnitten entsteht aus langjährigen, fortgesetzt einwirkenden pathologischen Kräften auf die Knochen und Gelenke 31. Auch deshalb wird empfohlen, sehr früh mit einer dynamischen Versorgung zu beginnen, um die Entwicklung der motorischen Funktion noch fördern zu können und Missbildungen der Knochen zu minimieren. Unterbleiben die trainierenden Ansätze, so ist mit weiterer Schwächung der Muskulatur und mit Zunahme von Kompensationshaltungen zu rechnen. Beides ließe weitere Deformitäten noch schneller voranschreiten. Um zielorientiert eine Versorgung zu planen, ist eine genaue, interdisziplinäre Gangdiagnostik erforderlich 32.
Bei Patienten mit strukturellen Gelenkkontrakturen und fehlenden aktiven Muskelfunktionen stößt dieses System an Grenzen. In solchen Fällen müssen rigidere Orthesensysteme zum Einsatz kommen.
Fazit
Die Carbon-Powerspring-Orthese ermöglicht ein dynamischeres Gangbild. Sie ist in der vorgestellten Form seit 2006 im Einsatz. Pro Jahr werden ca. 1.800 Patienten erfolgreich mit dieser AFO versorgt. Die Ergebnisse der Pilotstudie müssen zwar noch durch Studien zur Alltagspartizipation und zu den tatsächlichen Auswirkungen auf den Muskelapparat untermauert werden, jedoch zeigen das große Einzugsgebiet und die Zahl der Patienten nicht nur aus Deutschland, sondern zunehmend auch aus Österreich, Polen und Russland, dass sich der Versorgungsansatz bereits etabliert hat.
Interessenkonflikt
Die Autoren sind Mitarbeiter der Firma adViva GmbH.
Für die Autoren:
Gerhard Biber, OMM,
O.G.I.G. Practitioner
Geschäftsführer adViva GmbH
Standort Heidelberg
Eppelheimer Straße 64
69123 Heidelberg
biber@adviva-info.de
Begutachteter Beitrag/reviewed paper
Biber G, Rexing M. Effizientes Gehen in der neuromuskulär wirkenden Beinorthetik durch kinetische Energieumwandlung. Orthopädie Technik, 2020; 71 (4): S. 68–72
![In Hills Modell [efn_note]Hill AV. The heat of shortening and dynamics constants of muscles. Proceedings of the Royal Society, 1938; 126 (843): 136–195[/efn_note] steht F für die Kraft, CE für das kontraktile Element, also den Muskel, und SE für das serielle Element, die Sehne. SE drückt aus, dass die Sehne in Reihe mit dem Muskel steht. PE hingegen steht für „Paralleles Element“ und beschreibt das umschließende Bindegewebe, das eine zusätzliche elastische Komponente darstellt, die parallel zu CE und SE wirkt.](https://360-ot.de/wp-content/uploads/2020/04/ot_20-04_Hills_Modell_biber-738x445.jpg)

![Unterschiedliches zeitliches Erreichen motorischer Entwicklungsstadien nach GMFCS-Klassifizierung, gemessen mit der GMFM-66-Auswertungsmethode (GMFM = Gross Motor Function Measure) [efn_note]Hanna SE, Rosenbaum PL, Bartlett DJ, Palisano RJ, Walter SD, Avery L, Russell DJ. Stability and decline in gross motor function among children and youth with cerebral palsy aged 2 to 21 years. Developmental Medicine & Child Neurology, 2009; 51: 295–302[/efn_note].](https://360-ot.de/wp-content/uploads/2020/04/ot_20-04_GMFCS-Klassifizierung_GMFM-66-Auswertungsmethode_biber-800x445.jpg)
- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Sankey RJ, Anderson DM, Young JA. Characteristics of ankle-foot orthoses for management of the spastic lower limb. Developmental Medicine & Child Neurology, 1989; 31: 446–470
- Sankey RJ, Anderson DM, Young JA. Characteristics of ankle-foot orthoses for management of the spastic lower limb. Developmental Medicine & Child Neurology, 1989; 31: 446–470
- Hösl M, Böhm H, Arampatzis A, Döderlein L. Effects of ankle-foot braces on medial gastrocnemius morphometrics and gait in children with cerebral palsy. J Child Orthop, 2015; 9 (3): 209–219. doi: 10.1007/ s11832-015‑0664‑x. https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4486505/ (Zugriff am 04.03.2020)
- Buckon CE, Sienko Thomas S, Jakobson-Huston S, Moor M, Sussman M, Aiona M. Comparison of three ankle-foot orthosis configurations for children with spastic diplegia. Developmental Medicine & Child Neurology, 2004; 46: 590–598
- Hösl M, Böhm H, Arampatzis A, Döderlein L. Effects of ankle-foot braces on medial gastrocnemius morphometrics and gait in children with cerebral palsy. J Child Orthop, 2015; 9 (3): 209–219. doi: 10.1007/ s11832-015‑0664‑x. https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4486505/ (Zugriff am 04.03.2020)
- Buckon CE, Sienko Thomas S, Jakobson-Huston S, Moor M, Sussman M, Aiona M. Comparison of three ankle-foot orthosis configurations for children with spastic diplegia. Developmental Medicine & Child Neurology, 2004; 46: 590–598
- Romkes J, Hell AK, Brunner R. Changes in muscle activity in children with hemiplegic cerebral palsy while walking with and without ankle-foot orthoses. Gait & Posture, 2006; 24 (4): 467–474
- Buckon CE, Sienko Thomas S, Jakobson-Huston S, Moor M, Sussman M, Aiona M. Comparison of three ankle-foot orthosis configurations for children with spastic diplegia. Developmental Medicine & Child Neurology, 2004; 46: 590–598
- Owen E. How should we define the rockers of gait and are there three or four. Gait & Posture, 2009; 30S: S 49
- Hösl M, Böhm H, Arampatzis A, Döderlein L. Effects of ankle-foot braces on medial gastrocnemius morphometrics and gait in children with cerebral palsy. J Child Orthop, 2015; 9 (3): 209–219. doi: 10.1007/ s11832-015‑0664‑x. https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4486505/ (Zugriff am 04.03.2020)
- Morris C, Bowers R, Ross K, Stevens P, Phillips D. Orthotic management of cerebral palsy: Recommendations from a consensus conference. NeuroRehabilitation, 2011; 28: 37–46
- Hösl M, Böhm H, Arampatzis A, Döderlein L. Effects of ankle-foot braces on medial gastrocnemius morphometrics and gait in children with cerebral palsy. J Child Orthop, 2015; 9 (3): 209–219. doi: 10.1007/ s11832-015‑0664‑x. https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4486505/ (Zugriff am 04.03.2020)
- Döderlein L. Bedeutung der Muskulatur für die Entwicklung neuromuskulärer Deformitäten. Orthopäde, 2010; 39 (1): 7–14
- Owen E. How should we define the rockers of gait and are there three or four. Gait & Posture, 2009; 30S: S 49
- Hill AV. The heat of shortening and dynamics constants of muscles. Proceedings of the Royal Society, 1938; 126 (843): 136–195
- Fukunaga T, Kubo K, Kawakami Y, Fukashiro S, Kanehisa H, Maganaris CN. In vivo behavior of human muscle tendon during walking. Proc Biol Sci, 2001; 268 (1464): 229–233
- Meinders M, Gitter A, Czerniecki JM. The role of ankle plantar flexor muscle work during walking. Scand J Rehabil Med, 1998; 30 (1): 39–46
- Fukunaga T, Kubo K, Kawakami Y, Fukashiro S, Kanehisa H, Maganaris CN. In vivo behavior of human muscle tendon during walking. Proc Biol Sci, 2001; 268 (1464): 229–233
- Perry J. Kinesiology of Lower Extremity Bracing. Clinical Orthopaedics and Related Research, 1974; 102: 18–31
- Winter DA, Quanbury AO, Reimer GD. Analysis of instantaneous energy of normal gait. Journal of Biomechanics, 1976; 9 (4): 253–257
- Winter DA, Quanbury AO, Reimer GD. Analysis of instantaneous energy of normal gait. Journal of Biomechanics, 1976; 9 (4): 253–257
- Winter DA, Quanbury AO, Reimer GD. Analysis of instantaneous energy of normal gait. Journal of Biomechanics, 1976; 9 (4): 253–257
- Fukunaga T, Kubo K, Kawakami Y, Fukashiro S, Kanehisa H, Maganaris CN. In vivo behavior of human muscle tendon during walking. Proc Biol Sci, 2001; 268 (1464): 229–233
- Chen IH, Kuo KN, Andriacchi TP. The influence of walking speed on mechanical joint power during gait. Gait & Posture, 1996; 6 (3): 171–176
- Winter DA, Prince F, Frank JS, Powell C, Zabjek KF. Unified theory regarding a/p and m/l balance in quiet stance. Journal of Neurophysiology, 1996; 75 (6): 2334–2343
- Teixeira-Salmela LF, Nadeau S, Milot MH, Gravel D, Requiao LF. Effects of cadence on energy generation and absorption at lower extremity joints during gait. Clinical Biomechanics, 2008; 23 (6): 769–778
- Wilson JM, Flanagan EP. The role of elastic energy in activities with high force and power requirements: A brief review. Journal of Strength and Conditioning Research, 2008; 22 (5): 1705–1715
- Fukunaga T, Kawakami Y, Kubo K, Kanehisa H. Muscle and tendon interaction during human movements. Exerc Sport Sci Rev, 2002; 30: 106–110
- Hanna SE, Rosenbaum PL, Bartlett DJ, Palisano RJ, Walter SD, Avery L, Russell DJ. Stability and decline in gross motor function among children and youth with cerebral palsy aged 2 to 21 years. Developmental Medicine & Child Neurology, 2009; 51: 295–302
- Valmassy RL. Clinical biomechanics of the lower extremities. 1st edition. St. Louis, Missouri: Mosby, 1996: 260–264
- Döderlein L. Infantile Zerebralparese. Diagnostik, konservative und operative Therapie. 2., vollständig überarbeitete und aktualisierte Auflage. Berlin, Heidelberg: Springer, 2015: 55
- Götz-Neumann K. Gehen verstehen. Ganganalyse in der Physiotherapie. 4. Auflage. Stuttgart: Georg Thieme Verlag, 2016
