Einleitung
Die Zahl der Amputationen an der unteren Extremität ist ungleich höher als die an der oberen Extremität: Während es in Deutschland ca. 40.000 bis 60.000 Beinamputationen pro Jahr gibt, zählt man „nur“ etwa 10.000 Armamputationen pro Jahr 1. Daher lag der Fokus der orthopädischen Industrie im Hinblick auf die Entwicklung von Pass- und Funktionsteilen lange Zeit schwerpunktmäßig auf der Beinprothetik: Dort wurden Passteile verbessert, Mechaniken verfeinert, neue Technologien wie mikroprozessorgesteuerte Baugruppen implementiert, und es wurden große Fortschritte zum Wohle der Betroffenen erzielt.

Für den Bereich der Armprothetik galt das in den 80er und 90er Jahren bei Weitem nicht; die Zahl der zur Verfügung stehenden Passteile war sehr begrenzt. Häufig blieb es dem Geschick des Orthopädie-Mechanikers überlassen, individuelle Funktionselemente in Sonderanfertigung für den Amputierten zu entwerfen oder Kompatibilität zwischen Bauteilen verschiedener Hersteller in Sonderanfertigung zu erzielen. Bis Ende der 90er Jahre waren nur wenige elektrische Ellbogengelenke auf dem Weltmarkt verfügbar, und kaum eines wurde in Deutschland eingesetzt, sieht man von wenigen „Utah-Ellbogen“ 2 und noch weniger „Boston-Ellbogen“ 3 ab. Erst mit Einführung des „Dynamic Arm“ durch die Firma Ottobock 4 hielt diese Technik auch in Deutschland Einzug in den Versorgungsalltag. Die in dieser Zeit zur Verfügung stehenden System-Elektrohände arbeiteten zwar zuverlässig, waren aber hinsichtlich ihrer Möglichkeiten noch sehr weit von ihrem Vorbild – der menschlichen Hand – entfernt.
Erst zu Beginn dieses Jahrtausends beschleunigten sich die Innovationen auch im Bereich der Prothesenhände: Vor etwa zehn Jahren präsentierte der schottische Hersteller Touch Bionics 5 die erste multiartikulierende Hand („i‑Limb“). Etwa zeitgleich wurde an der Hochschule in Karlsruhe am Modell einer Adaptivhand gearbeitet und ein Prototyp entwickelt, der wie die i‑Limb-Hand das Prinzip des „Bionischen“, also eine Orientierung am Vorbild der Natur, zur Grundlage hatte. Weitere multiartikulierende Hände folgten.
Diese erfreuliche Entwicklung bescherte armamputierten Menschen einen großen Nutzen, denn nun waren die Möglichkeiten des Greifens deutlich verbessert: variable Daumenpositionen in Relation zu den Fingern, einzeln angetriebene Finger und damit die Möglichkeit, Gegenstände adaptiv zu umfassen, die Option, die Griffmuster der neuen Prothesenhände willkürlich zu wählen und zu wechseln – all das bot handamputierten Menschen viele neue Möglichkeiten und Gebrauchsvorteile im Alltag. Dies galt jedoch nicht für alle potenziellen Nutzer, wie im Folgenden aufgezeigt wird.
State of the Art bei Teilhandprothesen
Wie zuvor, als die weit höhere Anzahl der Beinamputierten die Entwicklung beeinflusst und die Ressourcen der Entwicklungsbüros der orthopädischen Industrie an sich gebunden hatte, so ließ sich auch bei den erfreulichen Fortschritten im Bereich der Handprothesen feststellen, dass wiederum eine kleine Teilgruppe von Betroffenen nicht – oder doch nur in geringerem Maße – von den Fortschritten und Entwicklungen profitieren konnte: Patienten mit Teilamputationen der Hände.
Zwar war die Touch-Bionics-Hand modular konstruiert, sodass die Finger letztlich durchaus geeignet erschienen, auch einzeln – dann mit einem separaten Prozessor – betrieben zu werden. Aber es dauerte noch einige Jahre, bis daraus eine leistungsfähige Prothesenlösung entstand 6. Und erst vor wenigen Jahren kam mit den „Vincent“-Fingern 7 eine zweite Option hinzu, um Patienten nach dem Verlust von Fingern aktive Prothesenfinger anbieten zu können. Für den Orthopädie-Techniker ist das begrüßenswert: Endlich gibt es Hightech-Lösungen auch für künstliche Finger. Gleichwohl gilt hier wie auch andernorts: Nicht alles, was technisch möglich ist, muss auch vorteilhaft für den Betroffenen sein. Nicht jede Prothesenlösung muss demnach aktiv angetrieben werden. Dagegen sind gerade im Bereich der Hand, die mehr als 20 Freiheitsgrade besitzt, hohe Anpassbarkeit und Flexibilität sowie die Option multipler Positionierbarkeit wichtig. Dabei kommen sowohl den Betroffenen als auch den Technikern neben den oben bereits erwähnten aktiven mechatronischen Fingern auch andere Lösungen, basierend auf innovativen Passteilen und hoher Handwerkskunst, zugute.
Versorgung nach den Regeln des Qualitätsstandards
Um eine adäquate Lösung für den einzelnen Betroffenen zu ermitteln, ist es hilfreich, sich am Vorgehen des Qualitätsstandards für die Prothetik der oberen Extremität 8 zu orientieren. Zwar wird der konkrete Versorgungsfall der Teilhandprothetik dort noch nicht beschrieben (dies soll in der zweiten Aufage ergänzt werden), aber eine Orientierung an den Versorgungspfaden der bereits abgebildeten Versorgungsvarianten ist auch im Fall der Teilhand amputation hilfreich.
Ganz zu Beginn dieses Versorgungspfades stellt sich die wichtigste Frage nach dem Rehabilitationsziel des Patienten. Dieses lässt sich durch die Beantwortung der folgenden Teilfragen genauer definieren:
- Was erwartet der Patient von einer Prothese?
- Was möchte er damit wieder können?
- Wie soll bzw. darf sie aussehen?
Sodann ist es Aufgabe des Orthopädie-Technikers, eine individuelle Versorgungsempfehlung für den jeweiligen Patienten zu entwickeln. Auch dabei hilft ein Fragenkatalog:
- Sind die Anforderungen des Patienten erfüllbar?
- Was ist die beste Schafttechnik?
- Welche Technik soll verwendet werden, und in welchem Ausmaß?
- Soll die Prothese eher robust oder eher hochrealistisch sein?
- Wenn aktive Bauteile vorgesehen sind: Welche Sensorik und welche Steuerung werden gewählt?
- Welche Handfunktionalität kann mit der Prothese gewonnen werden?
- Ist die Handgelenkfunktion erhalten?
- Falls das zutrifft: Wie kann sie uneingeschränkt erhalten bleiben?
- Bei Einschränkungen des Handgelenks: Wie kann es unterstützt werden?
An dieser Stelle wird der Versorgungspfad des Kompendiums zunächst verlassen, um die oben beschriebenen Aspekte zu klären: Bezeichnender- und sinnvollerweise stehen die Wünsche des Patienten ganz oben auf der Liste der einzelnen Schritte des Versorgungspfades. Der Techniker, im Bestreben, eine Versorgung „am Puls der Zeit“ zu erstellen, sollte sich in jedem Fall davor hüten, die Wünsche des Patienten nicht wahrzunehmen.
Habitusprothese, myoelektrische Partialhand oder Arbeitsprothese?
Dass die Bedürfnisse der Patienten höchst unterschiedlich sind, ist eine alltägliche Erfahrung des Technikers. Für manche Betroffene hat es höchste Priorität, in der Öffentlichkeit wieder unauffällig und ohne Stigmatisierung auftreten zu können; dies ist ihnen wichtiger als jede technische Raffinesse der Prothese. Für diese Patienten wird nach wie vor eine Teilhandprothese aus HTV-Silikon das geeignete Hilfsmittel nach dem Stand der Technik sein (Abb. 1a u. b). Es ist jedoch wichtig zu beachten, dass eine Habitusprothese aus HTV-Silikon nicht nur ein „Abbild“ einer Hand sein darf: Auch eine realistische und unauffällige Handprothese dieser Art sollte allen Anforderungen moderner Prothetik entsprechen, ein modernes und funktionelles Schaftsystem aufweisen und dem Patienten einen funktionellen Zugewinn bieten. Auch eine solche Prothese verlangt also große Sorgfalt bei der Erstellung des Prothesendesigns, der Fertigung der Testprothese, der Prothesengebrauchsschulung und letztlich der Fertigstellung und der Einweisung in den Gebrauch der Prothese.
Andere Patienten werden den Anspruch auf Funktionsunterstützung priorisieren und deutlich machen, dass das Aussehen für sie keine Rolle spiele. Hier ist dann der Techniker gefragt, mit dem Patienten genau zu klären, welche Funktionalität und welchen Einsatzbereich er für seine Prothese im Auge hat. So verlockend die Möglichkeiten des Einsatzes aktiv angetriebener Finger und Daumen auch sein mögen – sie haben, wie die folgende Auflistung zeigt, deutliche Grenzen:
- in Bezug auf die Baulänge und den daraus resultierenden notwendigen Raum für den Einbau,
- in Bezug auf die Griffkraft,
- in Bezug auf die Belastbarkeit (Druck/Gegendruck),
- in Bezug auf Schläge und Erschütterungen,
- in Bezug auf Feuchtigkeit und Staub sowie
- in Bezug auf das Umfeld des Einsatzes (etwa elektrische Felder).
Eine Prothese darf nicht behindern
Insbesondere der erste Aspekt dieser Auflistung ist heikel: Hier droht für den Techniker die Gefahr, trotz allen Engagements die Physiologie und die Proportionen der Hand aus dem Auge zu verlieren. Wenn bei der Amputation noch Teile der Hand und damit Funktionalität erhalten werden konnte, ist es wichtig, das Design der Teilhandprothese in idealer Weise auf die Proportionen der Hand und vor allem auf die Beweglichkeit bzw. den Bewegungsumfang der erhaltenen Finger abzustimmen. Die Restfunktion der Hand muss in jedem Fall erhalten bleiben und gefördert werden. Eine Prothese, die diese Möglichkeiten einschränkt oder sogar unmöglich macht, ist kontraindiziert. Es gibt Beispiele für Teilhandversorgungen, bei denen gut bewegliche, kräftige Fingerstümpfe (Zeigefinger bis zum proximalen Interphalangealgelenk und Daumen bis zum Interphalangealgelenk) für den Patienten praktisch unbrauchbar gemacht wurden, nur um eine Teilhandprothese mit vier mechatronischen Fingern zu erstellen. Der Zeigefinger wurde dabei in einen starren mittelhandumfassenden Schaft eingebettet, sodass er nicht mehr bewegt werden konnte. Die Fingergruppe musste, da das Grundglied des Zeigefingers noch vorhanden war, so weit nach distal versetzt werden, dass die Handprothese eine Überlänge von etwa 6 cm bekam. Der Daumenstumpf wurde zwar frei gelassen – weil aber die Fingerbauteile der Handprothese so weit nach distal gesetzt worden waren, war ein Greifen „Finger zu Daumen“ nunmehr unmöglich. Das theoretische Leistungsvermögen dieses Paradebeispiels einer Fehlversorgung war zwar durchaus beeindruckend:
- vier mechatronische Finger,
- wieder nahezu physiologische Beweglichkeit der Finger,
- Mikroprozessorsteuerung.
Jedoch nützte die gute Beweglichkeit des Daumens nichts mehr, weil der einzige Finger, der noch erhalten war und als Opponent hätte dienen können, in einem Prothesenschaft gefangen war. Auf diese Weise verpuffte jeglicher Nutzen des hier getriebenen hohen Aufwands.
Auch einfache Lösungen erfüllen ihren Zweck
Ein lediglich theoretischer Nutzen eines Hilfsmittels ist, wie man an diesem Beispiel erkennen kann, nicht relevant und macht nicht den Wert einer Prothese aus. In diametralem Gegensatz zur gerade beschriebenen Hightech-Prothese steht eine passive Gegengriffprothese (Abb. 2a–d). Anspruch des Patienten war höchste Robustheit und Unempfindlichkeit gegen Schläge, Staub und Feuchtigkeit – feinmechanische Fingerkonstruktionen, gleichgültig ob passiv oder aktiv, kamen damit nicht in Frage.
Der Patient war mit dieser sehr einfachen Versorgung hoch zufrieden und konnte, da die Finger wieder einen Opponenten bekommen hatten und dadurch sowohl Detailgriff als auch Faustschluss möglich waren, wieder im handwerklichen Bereich arbeiten. Dennoch verdeutlicht das an sich positive Versorgungsergebnis auch eine Problematik: In Abb. 2b wird ersichtlich, dass die mögliche Öffnungsweite zwischen Daumen und Fingern beschränkt ist. Im Rahmen der Testversorgung wurden zwar Daumenposition, ‑länge und ‑form im Sinne der Ansprüche des Patienten optimiert, aber mit der Positionierung des Daumens für diese Anforderungen wurde durch den starren Daumen auch die Griffweite limitiert. Da zum Zeitpunkt dieser Versorgung noch kein wirklich (hoch-)belastbarer verstellbarer Daumen zur Verfügung stand, war dies für den Patienten seinerzeit durchaus eine Versorgung „nach dem Stand der Technik“ – unter Berücksichtigung seiner Anforderungen an die Prothese. Auf jeden Fall bestätigte der Patient, dass er, obwohl mit einer passiven Gegengriffprothese versorgt, mit dieser Prothese alles andere als passiv agieren konnte (Abb. 3a–e).
Gebrauchsvorteil bedeutet Funktionsverbesserung
Von grundlegender Relevanz für eine adäquate Versorgung ist, wie oben bereits erläutert, ein physiologisch korrekter Aufbau mit erprobten, ausgewogenen Proportionen. Dabei ist zunächst die erhaltene kontralaterale Hand die wichtigste Informationsquelle: Mit ihrer Hilfe können Fingerlänge, Proportionen und die ursprüngliche Geometrie der Hand bestimmt werden. Spiegelt man diese Verhältnisse dann auf die betroffene teilamputierte Seite, so stellt man schnell fest, dass die vielen Freiheitsgrade der Hand ihren Sinn haben: Allein eine spiegelbildlich erstellte Fingergruppe oder wie oben beschrieben ein Daumen in einer fixen Position können zwar einen gewissen Nutzen aufweisen, aber zugleich wird immer eine Limitierung offensichtlich. Hier benötigt der Techniker wiederum die Unterstützung der Industrie: Robuste Passteile für Finger und Daumen sind gefragt, die sich in ihrem Winkel bzw. ihren Gelenken verstellen lassen, um so verschiedensten Aufgaben gerecht zu werden.
Seit einigen Jahren bietet unter anderem die Firma Vincent Systems 9 verstellbare Passteile für Prothesenfinger und Daumen an. Die Mechaniken und die Finger- bzw. Daumenkappen dazu gibt es in verschiedenen Größen. Ein „Ziehen“ am Finger setzt die Verriegelung frei und erlaubt eine Positionierung des Fingers – wenn man ihn wieder loslässt, rastet der Finger im neuen Winkel ein. Eine Verstellung ist hier also in einem Freiheitsgrad möglich – bei rotierendem Daumen ergeben sich zwei Freiheitsgrade („degrees of freedom“; DOF). Das bedeutet in vielen Fällen eine deutliche Funktionserweiterung der Teilhandprothese, da der Nutzer nicht mehr durch einen festen Winkel eingeschränkt ist. Allerdings muss man darauf hinweisen, dass die Mechanik und die Verriegelung der Passteile zwar durchaus funktionell, aber offensichtlich nicht sehr hoch belastbar sind – zur exakten Belastbarkeit macht der Hersteller keine Angabe.
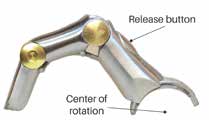
Eine bessere Funktion und Belastbarkeit versprechen die Fingermodule der Firma Point Designs LLC 10 (Abb. 4), die 2018 auf der OTWorld vorgestellt wurden: Sie sind aus Metall gefertigt, machen einen robusten Eindruck und versprechen eine Belastbarkeit von 45 kg pro Finger. Um sie zu verstellen, benötigt man auch nicht mehr die kontralaterale Hand: Der Nutzer kann sie einfach an der Tischplatte, seinem Bein oder einem anderen Gegenstand in 10 Stufen in die Flexion drücken. Beugt er sie bei voller Flexion noch ein Stückchen weiter, so strecken sich die Finger wieder. Wenn es erforderlich oder gewünscht sein sollte, kann der Nutzer die Finger auch aus einer teilflektierten Position wieder strecken; dazu muss er allerdings einen Knopf auf dem proximalen Fingeranteil drücken. Zum Einsatz kommen können die „Point Digits“, wenn der einzelne Finger im Grundgelenk oder kürzer amputiert wurde. Ein weiterer Vorteil, der dem Prothesenträger in Zukunft zugutekommt, besteht darin, dass der „Point Digit“ im Gegensatz zum Fingerbauteil der Firma Vincent Systems über drei Freiheitsgrade verfügt – es wird also ein regelrechter Faustschluss ermöglicht.
Eignung mechatronischer Lösungen
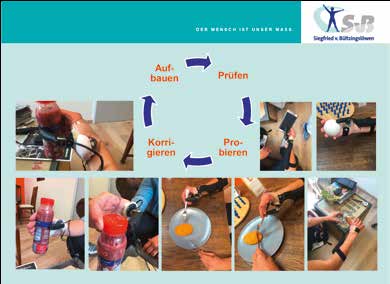
Die oben angeführten Argumente für eine Verstellbarkeit der Prothesenfinger und die Vorteile, die eine Vielzahl von Freiheitsgraden in diesen Bauteilen mit sich bringen, gelten natürlich nicht nur für passive Bauteile: Wenn die Amputationslängen es zulassen und wenn der Patient weniger grobmotorische Tätigkeiten anstrebt, sondern mit entsprechender Compliance seine Prothese eher für das geschickte Manipulieren leichterer Gegenstände des Alltags einsetzen möchte, so können auch mechatronische Finger und Teilhandprothesen die richtige Wahl sein. Die Versorgung ist dann aber noch ein wenig anspruchsvoller. Denn zu den schon erläuterten Anforderungen an den physiologisch korrekten Aufbau tritt dann die Anforderung, die Signale für die Steuerung der mechatronischen Finger zu ermitteln und die Sensoren dafür so ins Schaftsystem zu integrieren, dass alle erhaltenen Finger ihre Bewegungen ausführen können, ohne dass die Prothesenfinger sich dabei als störend erweisen. Dies ist selbst bei nur einem Finger eine Herausforderung (siehe den Versorgungszirkel in Abb. 5), bei mehreren Fingern sind die Anforderungen noch komplexer. Testversorgung, Prothesengebrauchsschulung und ergotherapeutisches Training sollten in diesen Fällen ausreichend lange, intensiv und gemeinsam mit Therapeuten bzw. Technikern erfolgen, die Erfahrung mit Teilhandversorgungen haben. Sind diese Voraussetzungen erfüllt, können hochfunktionelle Versorgungen erstellt werden, wie sie noch vor wenigen Jahren undenkbar waren (Abb. 6 a–e).
Ein Problem, das nach mehr Aufmerksamkeit seitens der Passteilhersteller verlangt, ist die Größe der benötigten Akkus und der Steuereinheit. Diese Komponenten haben heute noch Dimensionen, die es in den meisten Fällen unmöglich machen, sie im Bereich des Handschaftes unterzubringen. Der Patient ist gezwungen, zusätzlich zum Handschaft noch eine Art Bandage am Handgelenk oder Unterarm zu tragen – keine sehr zufriedenstellende Situation, aber heute noch nicht anders möglich.
Fazit
Der Patient ist das Maß der Dinge, und kein Prothesendesign ist per se eine adäquate Lösung für jeden TeilhandAmputierten. Robustheit und filigrane Bauweise sind schwer zu vereinbaren, und nicht alles, was neu und technisch up to date ist, bringt jedem Patienten auch Vorteile im Alltag. Die Anforderungen des Patienten beschreiben daher maßgeblich den jeweils zu beschreitenden Versorgungspfad. So ist von scheinbar simplen Lösungen bis zu Hightech-Anwendungen im heutigen Versorgungsalltag Raum für ganz verschiedenartige Varianten.
Der Autor:
Dieter Kretz, OTM
Orthopädietechnik von Bültzingslöwen GmbH
Am Unkelstein 8, 47059 Duisburg
dieter.kretz@otsvb.de
Begutachteter Beitrag/reviewed paper
Kretz D. Teilhandamputation und Hilfsmittelversorgung – welche Versorgungen sind sinnvoll? Orthopädie Technik, 2018; 69 (7): 40–44


















- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- MyHandicap.de. https://www.myhandicap.de/amputation-prothese/ (Zugriff am 06.06.2018)
- Motion Control. http://www.utah-arm.com/ua3-myoelectric-arm.php (Zugriff am 06.06.2018)
- Liberating Technologies. http://www.liberatingtech.com/products/elbows/LTI_Boston_Digital_Arm_Systems_for_Adults.asp (Zugriff am 06.06.2018)
- Otto Bock HealthCare Deutschland GmbH. https://www.ottobock.de/prothetik/produkte-a-bis‑z/armprothetik/dynamicarm-12k100n/index.html (Zugriff am 06.06.2018)
- Touch Bionics. https://www.touchbionics.com/products/active-prostheses/i‑limb-quantum (Zugriff am 06.06.2018)
- Touch Bionics. https://www.touchbionics.com/products/active-prostheses/i‑digits-quantum (Zugriff am 06.06.2018)
- Vincent Systems GmbH. https://vincentsystems.de/prothetik/vincent-partial-active/ (Zugriff am 06.06.2018)
- Verein zur Qualitätssicherung in der Armprothetik e. V. (Hrsg.). Kompendium Qualitätsstandard im Bereich Prothetik der oberen Extremität. Dortmund: Verlag Orthopädie-Technik, 2014
- Vincent Systems GmbH. https://vincentsystems.de/prothetik/vincent-partial-passive/ (Zugriff am 06.06.2018)
- The point digit. Point Designs LLC, Denver, Colorado, USA. https://www.pointdesignsllc.com/#products (Zugriff am 05.06.2018)
