Einleitung
Die Prothetikindustrie erfährt derzeit bedeutende technologische Fortschritte, wodurch viele amputierte Menschen Zugang zu leistungsstarken Prothesensystemen haben. Transfemoral Amputierte benötigen ein Kniegelenk, das ihnen während der Belastungsphase Sicherheit und Stabilität vermittelt und während der Schwungphase eine harmonische und exakte Steuerung des Bewegungsablaufs gewährleistet. Um dies zu erreichen, verwenden moderne prothetische Kniegelenke komplexe Systeme von Sensoren und elektronischen Steuerungen, die den Gangzyklus konstant überwachen und durch Veränderung des Gelenkwiderstandes der hydraulischen Dämpfung steuern. Während diese Kniegelenke zunehmend in der klinischen Praxis eingesetzt werden, ist ihre breite Anwendung durch die hohen Anschaffungs‑, Anwendungs- und Wartungskosten in vielen Fällen begrenzt.

Wegen ihrer Einfachheit und Erschwinglichkeit werden rein mechanische Prothesenkniegelenke weiterhin weltweit am häufigsten eingesetzt. Diese Kniegelenke, die vorwiegend auf einfachen gewichtsaktivierten Bremssystemen, polyzentrischen stabilisierten Gelenkgeometrien und einfachen, einachsigen freien oder gesperrten Kniegelenken aufbauen, sind Technologien, die in ihrem Ursprung bis vor dem Zweiten Weltkrieg datieren. Diese Mechanismen sind üblicherweise mit einer einfachen reibungsabhängigen Schwungphasensteuerung gekoppelt oder seit ca. 30 Jahren mit pneumatischen oder hydraulischen Systemen ausgestattet. Mechanische Verbesserungen hin zu mehr Funktionalität waren begrenzt, sodass die Leistungsfähigkeit dieser Kniegelenkarten primär für schwächere Mobilitätsklassen geeignet ist, die typischerweise als Mob-1- oder Mob-2-Mobilitätsgrade klassifiziert sind. Personen der Mobilitätsgrade Mob 3 oder Mob 4 in Entwicklungs- und Schwellenländern, die aber keinen Zugang zu hydraulischen oder mikroprozessorbasierten Kniegelenken haben, sind auf diese einfachen Kniemechanismen angewiesen, obwohl diese biomechanisch und funktionell für sie nicht geeignet sind. Dies kann zu einer weniger effizienten Mobilität, Einschränkungen bei der Durchführung körperlicher Aktivitäten und zu langfristigen sekundären Gesundheitsproblemen wie Rückenschmerzen oder Gelenkproblemen führen.
Der Impuls für die Entwicklung des All-Terrain-Knies war es, diese Lücke bei den prothetischen Kniegelenken zu überbrücken, indem Leistungsfähigkeit und Erschwinglichkeit kombiniert werden. Dem All-Terrain-Knie liegt die Philosophie zugrunde, dass ein intelligentes, aber einfaches Design gleichzeitig hohe Funktionalität, Haltbarkeit und Erschwinglichkeit bieten kann. Das All-Terrain-Knie basiert auf zwei neuen Mechanismen, die in den letzten zehn Jahren erforscht und entwickelt wurden:
- Zur Standphasensicherung wurde die automatische Standphasensicherung (ASPL) entwickelt, um das Knie ab dem Beginn der Standphase zu stabilisieren, ohne den natürlichen Bewegungsablauf zu behindern.
- Für die Schwungphasensteuerung bietet das AT-Knie einen variabel einstellbaren Friktionsmechanismus, der durch ein einstellbares Federsystem ergänzt wird, um eine Dämpfung ähnlich der von Hydrauliksystemen zu erreichen.
Die Systeme wurden als Teil einer Reihe von klinischen und wissenschaftlichen Studien sorgfältig recherchiert und getestet 1.
Zweck dieses Artikels ist es, die technische Entwicklung des All-Terrain-Kniegelenkes zu veranschaulichen und die Funktion der automatischen Standphasensicherung sowie der reibungsabhängigen Schwungphasensteuerung zu beschreiben. Des Weiteren wird ein Überblick über empirische Erkenntnisse aus der Anwendung des All-Terrain-Knies in klinischen Studien vermittelt. Abschließend werden die jüngsten Erfahrungen mit dem Kniegelenk aus den USA und aus Deutschland vorgestellt, nachdem das Gelenk nun kommerziell in Nordamerika (über LegWorks), in Deutschland (über die DOI ortho-innovativ GmbH) und anderen Ländern Europas erhältlich ist. Hauptziel dieses Artikels ist es, Interessierte über diese neue Technologie zu informieren und eine Anleitung zu vermitteln, wie diese Technologie am besten genutzt werden kann, um die Bedürfnisse einer Vielzahl von Patienten mit unterschiedlichen Wünschen zu bedienen. In dieser Hinsicht wurde das All-Terrain-Knie erfolgreich an einer breiten Anzahl von Patienten im Alter zwischen 10 und 70 Jahren erprobt, die die Mobilitätsklassen Mob 1 bis Mob 4 umfassten und die sowohl in Industrie- als auch in Entwicklungsländern leben.
Die Technik hinter dem All-Terrain-Knie
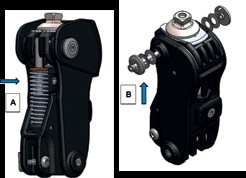
Das All-Terrain-Knie (AT-Knie) stellt eine radikale Abkehr von prothetischem Design und prothetischer Funktion dar, die das derzeitige Verständnis der Leistungsfähigkeit üblicher Kniegelenkmechanismen herausfordert. Sie basiert insbesondere auf zwei neuartigen Mechanismen der Standphasensicherung und der Schwungphasenkontrolle. Diese einfachen, aber wirksamen Mechanismen sind in einem Kniegelenkdesign aus spritzgießbaren Polymeren integriert, wodurch Herstellungszeiten und ‑kosten reduziert werden konnten. Das Ergebnis ist ein einfaches, robustes, wasser- und schmutzabweisendes Design, das nur wenige Einschränkungen in Bezug auf die Einsatzmöglichkeiten des AT-Kniegelenks nach sich zieht (Abb. 1).
Die Auto-Lock-Technologie
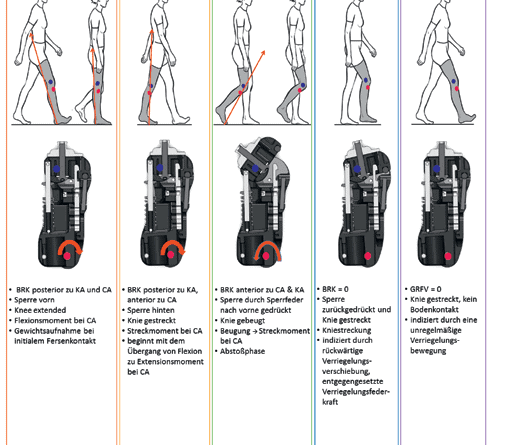
Das All-Terrain-Knie nutzt einen gänzlich neuen Mechanismus: die automatische Standphasensicherung, auch „Auto-Lock“ genannt. Im Gegensatz zu den meisten anderen mechanischen Kniegelenken (einschließlich der als sehr sicher geltenden, z. B. des 3R15-Sicherheitsknies), sperrt das Auto-Lock-System das Kniegelenk sicher vor dem Fersenkontakt, um ein hohes Maß an Sicherheit während der initialen Belastungsphase zu gewährleisten. Am Ende der Standphase wird das Kniegelenk entriegelt, um eine sanfte und biomechanisch effiziente Initialisierung der Schwungphase einzuleiten. Somit verspürt der Benutzer des All-Terrain-Knies ein leichtes und natürliches Gehen, da das Kniegelenk den Gangzyklus zu keinem Zeitpunkt einschränkt (Abb. 2).
Vorläufige Studien, die den Auto-Lock-Mechanismus mit üblichen mechanischen Knien vergleichen, zeigen die potenziellen klinischen Vorteile auf. In einer mit Jugendlichen durchgeführten Studie, die das AT-Knie mit polyzentrischen Kniegelenken vergleicht 2 , wurde ein signifikanter Rückgang von Stürzen von einmal pro Tag zu einmal pro Monat festgestellt. In einer neueren Studie wurde bei einer Gruppe von Jugendlichen in einem Vergleich des AT-Knies mit dem gewichtsaktivierten Bremsknie 3R15 3 erneut eine höhere Stabilität bestätigt. In derselben Studie zeigte sich auch eine deutlich höhere Effizienz des Gehens (ein im Durchschnitt 40 % niedrigerer Energieverbrauch) mit dem All-Terrain-Knie im Vergleich zum 3R15. Eine mögliche Erklärung dafür besteht in den unterschiedlichen Mechanismen des 3R15- und des AT-Knies, da der Anwender des 3R15 das Prothesenbein entlasten muss, um die Beugung einzuleiten, während der Anwender des AT-Knies durch eine natürliche Vorfußlast die Schwungphase einleitet.
Während der Auto-Lock-Mechanismus viele funktionale Vorteile hat, gibt es einige Einschränkungen hinsichtlich des Einsatzes. Zunächst ist anzumerken, dass der Mechanismus keinen Stolperschutz hat, da er verriegelt, wenn er vollständig gestreckt ist. Da das Kniegelenk in Streckung immer gesperrt ist, muss es zum Sitzen durch den Benutzer entsperrt werden. Dies kann entweder durch Belastung des Vorfußes oder durch Entsperren des Knies durch Druck von oben auf die Knieabdeckung geschehen. Obwohl das AT-Knie auf den meisten Terrains gut funktioniert, kann die Entriegelungsfunktion bei sehr steilen Gefällen aufgrund unzureichender Belastung des prothetischen Vorfußes eingeschränkt sein. Da das AT-Knie während der Belastungsphase immer gestreckt ist, ermöglicht es auch kein Yielding beim Bergab- und Treppabgehen.
Abschließend soll auch das Potenzial des Auto-Lock-Systems für Trainingseffekte erwähnt werden. Viele Amputierte gewöhnen sich einen schlechten Gang an und nutzen dabei das Potenzial ihrer Prothese nicht voll aus. Dazu gehört, dass der Amputierte seine Prothese zu kurz belastet und sein Bein zur Einleitung der Schwungphase vorzeitig entlastet, anstatt den Gangzyklus durch das Abrollen über den Vorfuß abzuschließen, wie es biomechanisch eigentlich normal wäre. Die inhärente Funktion des Auto-Lock-Mechanismus kann dazu beitragen, diese Tendenzen abzubauen, da der Nutzer über den ganzen Fuß abrollen muss, um das Kniegelenk zu entsperren, und gleichzeitig die Hüfte beugen muss, wie es auch der Nichtamputierte tut. Daher kann der Auto-Lock-Mechanismus dazu beitragen, eine symmetrische Belastung zur Erzielung eines möglichst normalen und effizienten Gangmusters zu erhalten. Dadurch kann das Kniegelenk z. B. eine wichtige Unterstützung beim Übergang eines Mob-2-Level-Läufers (der von der Stabilität des Knies profitieren wird) zu einem Mob-3-Läufer darstellen, da dieser dann auch im Außenbereich effizient aktiv sein kann.
Der variabel einstellbare Bremswiderstand (VEB)
Um die einzigartige Funktion des VEB zu verstehen, ist es wichtig, zunächst konventionelle Technologien und deren Anwendung zu berücksichtigen. Die Schwungphasensteuerung bezieht sich auf einen geringen Dämpfungswiderstand am Kniegelenk, der zur Kontrolle der Beugung und Streckung während der Schwungphase genutzt wird. Üblicherweise wird für niedrige Mobilitätsgrade (Mob 1 und Mob 2) ein konstanter Reibungswiderstand am Knie eingestellt, um es Benutzern zu ermöglichen, mit einer einzigen, langsamen Geschwindigkeit zu laufen. Steigende Gehgeschwindigkeiten sind hier nur mit kompensatorischen Gangbewegungen und größerer Ineffizienz möglich. Pneumatische und hydraulische Systeme lösen dieses Problem, indem sie den Widerstand verringern oder erhöhen, wenn die Person langsamer oder schneller läuft, weshalb diese Systeme als „schrittzyklusabhängig“ bezeichnet werden. Im Gegensatz dazu führen Kniemechanismen mit konstantem Widerstand zu einer übermäßigen Kniebeugung und einem übermäßigen Fersenabhub sowie zu unerwünschten verlängerten prothetischen Seitwärtsbewegungen bei höheren Ganggeschwindigkeiten.
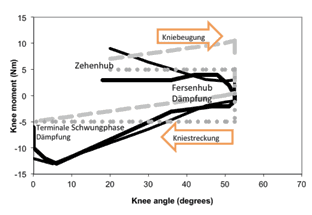
Ziel des VEB-Mechanismus ist es, die Funktion einer Hydraulik ohne Verwendung einer solchen zu erreichen. Um die Wirkung eines hydraulischen Systems nachzuahmen, wobei der Widerstand gegen die Beugung mit der Kadenz erhöht wird (d. h. Gehgeschwindigkeit), verwendet der VEB eine Feder mit einer schnell zunehmenden Steifigkeit bei höheren Beugungswinkeln. Bei niedrigen Geschwindigkeiten und geringem Kniebeugungswinkel ist die Federkraft schwach. Hingegen steigt sie bei schnelleren Gehgeschwindigkeiten und höheren Kniebeugungswinkeln an, um der Beugung entgegenzuwirken. Die dabei gespeicherte Energie wird genutzt, um die folgende Kniestreckung zu unterstützen und somit die Schwungphasenzeit zu verkürzen. Durch die Vermeidung einer übermäßigen Kniebeugung und damit einhergehender Verringerung des Winkelausschlages und der Winkelgeschwindigkeit des Unterschenkels wird auch der Streckanschlag gedämpft.
Der Streckanschlag wird durch das System der variablen Reibungskontrolle verringert. Dieses erzeugt einen signifikant höheren Widerstand, besonders vor der vollkommenen Kniestreckung, wodurch sich im Vergleich zu Kniegelenken mit konstantem Reibungswiderstand die Geschwindigkeit des Unterschenkels zum Ende der Schwungphase vermindert und ein physiologischeres Gehen ermöglicht wird (Abb. 3).
Warum wird diese Art von variabel einstellbarem Bremswiderstand (VEB) nicht auch bei anderen Arten von Prothesenkniegelenken verwendet? Dies kann zum Teil darauf zurückgeführt werden, dass die meisten Kniegelenke Vorbringerfedern als Mittel verwenden, um sicherzustellen, dass das Knie in der späten Schwungphase vollständig gestreckt ist, um in der Belastungsphase sicher zu sein. Da das AT-Knie einen Auto-Lock-Mechanismus hat, der das Knie in der späten Schwungphase voll gestreckt hält, kann die Funktion des Vorbringer-Mechanismus besser dazu genutzt werden, die Schwungphase zu steuern. Im Gegensatz zur herkömmlichen Anwendung von Vorbringerfedern, die in der finalen Streckbewegung hohe Kräfte liefern, liefert das VEB dann eine schwächere Streckkraft. Wenn das Bein um 40 Grad oder mehr gebeugt wird, wirkt dagegen eine höhere Kraft in die Knieextension. Eine weitere Verbesserung dieses Prinzips wird durch ein Doppelfedersystem mit einer weicheren Feder von 0 bis 40 Grad und einer viel steiferen Feder bei höheren Flexionswinkeln erreicht 4 5.
Anwendererfahrungen und Schlussfolgerungen
In einer Studie mit dem AT-Knie 6 wurden Zeit-Distanz-Parameter an sechs Oberschenkelamputierten beim Gehen auf festem und unstetem Untergrund mit Hilfe einer Kamera und per Zeitmessung untersucht. Alle sechs Probanden nutzten hierbei das AT-Knie. Es wurden keine Veränderungen am Schaft der Probanden vorgenommen.
Die gewonnenen Aussagen zu Veränderungen der betrachteten Parameter können zwar nicht auf die gesamte Zielgruppe übertragen werden, jedoch zeigen sie deutlich, dass das verwendete AT-Kniegelenk bei variierender kinematischer Beanspruchung auf verschiedenen Untergründen ein sicheres und dynamisches Gehen ermöglicht (Abb. 4, 5).
Das All-Terrain-Knie wurde in den vergangenen Jahren in über zehn Ländern getestet 7 8 und durch die Berücksichtigung der gewonnenen Erkenntnisse kontinuierlich weiterentwickelt. Die Aussagen der über 50 Anwender waren überwiegend sehr positiv, wobei die an den Studien teilnehmenden Amputierten besonders die hohe Sicherheit während der Standphase und die dynamische Geschwindigkeitssteuerung während der Schwungphase hervorhoben. Die Rückmeldungen, sowohl von den Anwendern als auch von den Orthopädie-Technikern, haben dazu geführt, dass zusätzliche Features für das AT-Knie entwickelt werden konnten. Im Unterschied zu den ersten Versionen ist das Kniegelenk heute seewasserfest, verfügt über einen einfachen Mechanismus, um es bei Bedarf ganz zu sperren, und kann bis zu einem Gewicht von 125 kg verwendet werden. Bei Bedarf steht auch ein Sondermodell zur Verfügung, das eine Gewichtsbelastung von bis zu 150 kg ermöglicht.
Zusammenfassend kann festgestellt werden, dass das AT-Knie ein sehr sicheres, funktionelles und robustes Kniegelenk ist, das durch seine Einsatzmöglichkeiten in allen Terrains sowohl in Industrie- als auch in Entwicklungsländern seine Berechtigung hat und eine wertvolle Erweiterung der bestehenden mechanischen Kniegelenke darstellt.
Für die Autoren:
Heinz Trebbin, M. Sc., OTM
Geschäftsführer DOI ortho-innovativ GmbH
Beethovenstr. 23
87439 Kempten
trebbin@ortho-innovativ.com
Begutachteter Beitrag/reviewed paper
Trebbin H, Andrysek J, Weigel J. Neuentwicklung eines mechanischen Prothesenkniegelenks. Orthopädie Technik, 2016; 67 (12): 22–25


- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- LegWorks. http://www.legworks. com (Zugriff am 29.09.2016)
- Andrysek J, Naumann S, Cleghorn W. Design and quantitative evaluation of a stance-phase controlled prosthetic knee joint for children. IEEE Trans Neural Syst Rehabil Eng, 2005; 13 (4): 369–378
- Andrysek J, Wright V, Rotter K, Garcia D, Valdebenito R, Mitchell CA, Rozbaczylo C, Cubillos R. Longterm clinical evaluation of the automatic stance-phase lock-controlled prosthetic knee joint in young adults with unilateral above-knee amputation. Disabil Rehabil Assist Technol, 2016; 4: 1–7 [Epub ahead of print]
- Furse A, Cleghorn W, Andrysek J. Improving the gait performance of non-fluid-based swing-phase control mechanisms in above-knee prostheses. IEEE Trans Biomed Eng, 2011; 58 (8). doi: 10.1109/ TBME.2011.2155059 [Epub]
- Furse A, Cleghorn W, Andrysek J. Development of a low-technology prosthetic swing-phase mechanism. J Med Biomed Eng, 2011; 31 (2):145–150
- Freyer M. Kinematik des Gehens Oberschenkelamputierter mit einem neuen Kniegelenk auf unstetem Untergrund. Bachelorarbeit, PFH Göttingen, 2016
- LegWorks. http://www.legworks. com (Zugriff am 29.09.2016)
- Andrysek S, Klejman S, TorresMoreno R, Heim W, Steinnagel B, Glasford S. Mobility function of a prosthetic knee joint with an automatic stance phase lock. Prosthet Orthot Int, 2011; 35: 163–170
