Einleitung
In den letzten Jahrzehnten konnten wichtige Fortschritte in der Technik der Armprothetik, speziell der myoelektrischen, erzielt werden. Dabei waren konventionelle myoelektrische Systeme mit einer Grifffunktion (Öffnen und Schließen der Hand) über lange Zeit der Standard. Um dem Anwender die Möglichkeit zu geben, sich mit seiner Prothese noch besser an die Anforderungen seiner Umwelt anzupassen, gibt es seit einigen Jahren multifunktionelle Prothesensysteme mit mehr als einem Freiheitsgrad. Ein Beispiel für diese Weiterentwicklung ist die 2011 auf dem internationalen Markt eingeführte Michelangelo-Hand (Otto Bock).

Die in der Zwischenzeit durchgeführten und publizierten Untersuchungen vergleichen dieses System mit Prothesensystemen mit einem Freiheitsgrad. Es handelt sich um die Arbeiten von Pröbsting et al. 1, Luchetti et al. 2, Belter et al. 3, Cutti et al. 4 und Bertels et al. 5. Darin wird im Speziellen auf die Themengebiete „Griffpositionen und ‑kraft“, „Handfunktion“, „Aktivitäten des täglichen Lebens (ADLs)“ sowie „Ausgleichsbewegungen und Schmerzen“ eingegangen. Auch wenn die Verfasser im Rahmen dieses Übersichtsartikels auf eine systematische Literaturanalyse verzichtet haben, so recherchieren sie regelmäßig den Stand der publizierten Literatur und gehen davon aus, dass keine wesentlichen Informationen übersehen wurden. Auf die technische Ausführung der Hand wird hier nicht im Detail eingegangen, in diesem Zusammenhang sei auf Pröbsting et al. 6 verwiesen.
Griffpositionen/-kraft
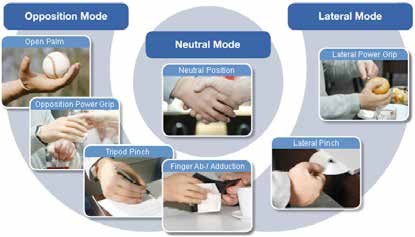
Die Michelangelo-Hand besteht aus vier beweglichen Fingern (Zeige- und Mittelfinger werden aktiv angesteuert, Ringfinger und kleiner Finger bewegen sich passiv) und einem separat aktiv positionierbaren Daumen. Somit hat der Anwender die Auswahl zwischen den in Abbildung 1 dargestellten Griffpositionen: einer Position mit geöffneter Handfläche („Open Palm“), einer Neutralstellung, dem traditionellen Oppositionsgriff, wie er in Systemen mit einem Freiheitsgrad implementiert ist, und einem lateralen Griff, der durch das Umstellen des Daumens erzeugt wird („Lateral Mode“). Die beiden letzteren Griffe können in einer kräftigeren Variante („Power Grip“) und einer feinmotorischeren Variante („Pinch“) angeboten werden. Auch die Ab-/Adduktion der Finger selbst stellt eine Positionierungsvariante dar.
Luchetti et al. 7 berichteten darüber, welche der dargestellten Griffpositionen im Alltag bevorzugt werden. Zur Untersuchung wurden sechs transradial Amputierte mit einem durchschnittlichen Alter von 47 Jahren (15 Jahre nach Amputation) herangezogen. Sowohl nach drei als auch nach sechs Monaten der Verwendung wurde der interne Speicher ausgelesen, um auf die Anzahl der Bewegungszyklen zu schließen. Pro Anwender wurden zwischen 38.705 und 435.208 Zyklen über ein halbes Jahr dokumentiert. Die Systeme befanden sich in täglicher Nutzung. Vom Start des Tests bis zur ersten Auswertung wurden von den Anwendern zu 73 % laterale Griffmodi verwendet, deren Anteil nach weiteren drei Monaten auf 77 % anstieg. Diese Ergebnisse stehen tendenziell im Einklang mit den Resultaten von Zheng et al. 2011 8. Anhand zweier Nichtamputierter (41-jähriger Maschinist und 30-jährige Hausfrau) wurde der Anteil verschiedener Griffe bei beruflichen bzw. häuslichen Aktivitäten berechnet. Für Berufe, die feine Bewegungen oder auch Kraft für das Heben schwerer Objekte benötigen, kommen „Lateral Pinch“ und „Power Grip“ am häufigsten zur Anwendung. Zu Hause wird überwiegend der „Lateral Power Grip“ bevorzugt.
Der Wert für den praktischen Einsatz von Prothesenhänden liegt durchschnittlich bei 45 N 9. Belter et al. 10 stellen in ihrer vergleichenden technischen Untersuchung multifunktioneller Prothesensysteme 70 N für „Opposition Mode“ sowie 60 N für „Lateral Mode“ fest.
Handfunktion
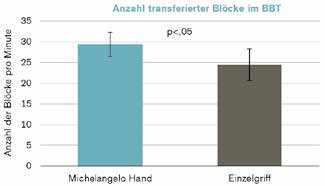
Luchetti et al. 11 analysierten den funktionellen Unterschied zwischen der Michelangelo-Hand und Prothesenhänden mit Einzelgriff-Funktion. Eine Beschreibung sowie die Ergebnisse sind Tabelle 1 bzw. Abbildung 2 zu entnehmen. Die Unterschiede in den Ergebnissen bestätigen die höhere Genauigkeit und Geschwindigkeit beim Ergreifen und Bewegen diverser Objekte durch multifunktionelle Myoprothesen.
Cutti et al. 12 eruierten Unterschiede bezüglich Geschicklichkeit und Geschwindigkeit zwischen einer gesunden Hand, der Michelangelo-Hand und einem System mit einem Freiheitsgrad.
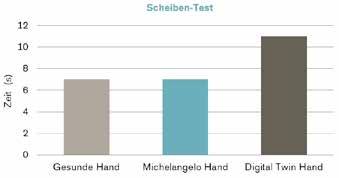
Dem unilateral transradial Amputierten (50 Jahre, 30 Jahre nach Amputation) wurden vier einhändige Aufgaben gestellt: Eine genormte Scheibe (aus dem MMDT-Set) musste zwischen vier vordefinierten Bereichen eines Tisches vor dem Körper bewegt werden. Mit durchschnittlich sieben Sekunden benötigte der Anwender mit der Michelangelo-Hand genauso lange wie mit der kontralateralen gesunden Hand. Der Vergleichswert betrug bei der Aufgabenerfüllung mit der Digital Twin Hand elf Sekunden (Abb. 3). Der Zeitunterschied der beiden Prothesensysteme besteht aufgrund der flexiblen Handgelenksstellung, die eine bessere Positionierung erlaubt.
Bei den Aufgaben, die vornehmlich mit dem Oppositionsmodus durchgeführt werden konnten, erwiesen sich die Prothesensysteme als gleichwertig. Die gesunde Hand benötigte für die gleichen Aufgaben im Schnitt 50 % der Zeit.
Aktivitäten des täglichen Lebens
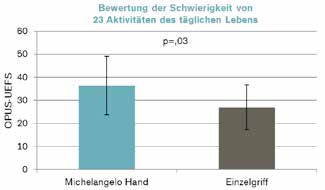
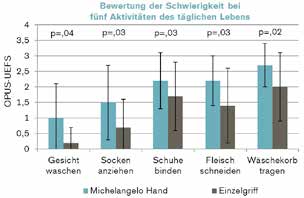
Pröbsting et al. 13 analysierten in einer vergleichenden Untersuchung den Unterschied bei 23 ADLs (9 einhändige und 14 beidhändige Aufgaben) zwischen der Michelangelo-Hand und Myoprothesen mit einer Grifffunktion. Die 16 männlichen Probanden (im Durchschnitt 41 Jahre, 12,8 Jahre nach unilateraler transradialer Amputation) bewerteten die Schwierigkeit der Durchführung der Bewegungen sowie die funktionellen Fähigkeiten anhand eines angepassten OPUS-UEFS (Orthotics and Prosthetics User Survey – Upper Extremity Functional Status) sowie per PUFI (Prosthetic Upper Extremity Functional Index). Zu Studienbeginn wurde die aktuelle Versorgung, nach mindestens vier Wochen die Michelangelo-Hand beurteilt. Im Vergleich wurden die Aktivitäten des täglichen Lebens durch die multifunktionelle Prothese als 35 % vereinfacht empfunden (Abb. 4). Signifikante Erleichterungen wurden für fünf beidhändige Aufgaben (Gesicht waschen, Socken anziehen, Schuhe binden, Fleisch mit Messer und Gabel schneiden und Wäschekorb tragen) ermittelt (Abb. 5). Die Anwender setzten die Prothese vermehrt bei beidhändigen Aktivitäten ein, da die Bewegungen um 31 % einfacher empfunden wurden. Einhändige Bewegungen wurden typischerweise nicht mit der Prothesenhand, sondern mit der kontralateralen Seite durchgeführt.
Luchetti et al. 14 beurteilten den psychosozialen Aspekt anhand eines OPUS-UEFS. Die Befragungen fanden sechs Monate nach der Versorgung statt. 84 % der Anwender empfanden die ADLs mit der Michelangelo-Hand als einfacher. Die Probanden äußerten sich über eine Annäherung an die Eigenschaften einer gesunden Hand in Bezug auf Natürlichkeit und die Ausführung der Bewegungen.
Ausgleichsbewegungen und Schmerzen
Auf die Limitationen der prothetischen Versorgung reagieren viele Amputierte der oberen Extremität mit Ausgleichsbewegungen. Dazu zählen kompensatorische Oberarm- und Schulterbewegungen sowie extensive Rumpfrotationen. Über die Jahre kann dies zur Überbeanspruchung umliegender Gelenke, muskulären Dysbalancen und Langzeitbeschwerden wie Schmerzen führen 15. Cutti et al. 16 identifizierten Einschränkungen der Ellbogenflexion sowie der Schulterbewegung der Amputationsseite bei vier unilateralen Aktivitäten. Eine Reduktion der Schulterblattneigung wurde bei Aufgaben, die bevorzugt mit dem Oppositionsmodus durchgeführt wurden, bei Anwendung der multifunktionellen Myoprothese eruiert. Bei lateralen Griffen zeigte sich eine Wiederherstellung eines natürlichen Bewegungsmusters.
Bertels et al. 17 beurteilten den Einfluss des Handgelenkwinkels auf Ausgleichsbewegungen mit sechs erfahrenen Myoprothesenanwendern (Durchschnittsalter 38,7 Jahre, davon 23 Jahre mit myoelektrischer Prothese). Kinematische Messungen wurden bei fünf einhändigen Aufgaben durchgeführt. Als myoelektrische Versorgung wurde eine Prothese mit einer Grifffunktion sowie einem einstellbaren Handflexionswinkel von 0°, 20° und 40° eingesetzt. Vor den Messungen wurde die Rotation der Hand den Ansprüchen des Anwenders angepasst. Bei 15 von 30 Versuchen wurde ein Flexionswinkel von 40° bevorzugt. Durch die adaptive Rotation und Flexion konnte eine Verbesserung in Bezug auf Ausgleichsbewegungen des Arms sowie des ganzen Körpers erzielt werden.
Schlussfolgerung
Die Michelangelo-Hand mit dem AxonBus-Prothesensystem bietet dem Prothesenanwender die Möglichkeit, seine Griffmuster zu erweitern. Dabei zeigen die vorgestellten Untersuchungen, dass insbesondere die Nutzung lateraler Griffmuster Geschicklichkeit und Geschwindigkeit bei gezielten Greifbewegungen spürbar verbessert. Relevante Aktivitäten des täglichen Lebens werden signifikant einfacher ausgeführt. Besonders bei beidhändigen Aufgaben wird die Prothese deutlich häufiger eingesetzt als bei Systemen mit nur einem Freiheitsgrad. Im Vergleich zu Prothesen mit einer Grifffunktion können Ausgleichsbewegungen für den ganzen Körper durch das flexible und rotierende Handgelenk der Michelangelo-Hand reduziert werden. Durch die Reduktion insbesondere der kompensatorischen Schulterblattbewegungen wird eine beeindruckende Annäherung an nahezu natürliche Armbewegungsmuster erreicht. Es steht außer Frage, dass die natürliche Handfunktion ein – auch mit dem aktuellen Stand der Technik – unerreichtes Vorbild bleibt. Doch zeigt sich, dass die Nutzung von Systemen mit mehreren Freiheitsgraden sich diesem Ziel weiter nähert.
Für die Autoren:
Markus Klinger, M. Sc.
Design Validation Engineer
Otto Bock Healthcare Products GmbH
Brehmstraße 16
A‑1110 Wien, Österreich
markus.klinger@ottobock.com
Klinger M, Sreckovic I, Mileusnic M, Hahn A. Michelangelo-Hand – ein Überblick über die klinische Evidenz. Orthopädie Technik, 2016; 67 (12): 26–29
| Funktioneller Test | Beschreibung | Ergebnis |
|---|---|---|
| Box and Blocks Test (BBT) | Innerhalb einer Minute sollen mit einer Hand so viele Blöcke wie möglich vom ersten zum nebenliegenden zweiten Fach einer Box gehoben werden. | Anzahl der Blöcke: +20,8 % |
| Minnesota Manual Dexterity Test (MMDT) | Eine vordefinierte Anzahl an Scheiben muss in eine vorgeprägte Musterplatte gelegt werden. Dabei wird die Zeit gestoppt. | Benötigte Zeit: –14,8 % |
| Southampton Hand Assess- ment Procedure (SHAP) | Der Anwender muss 20 Geschicklichkeitsübungen des täglichen Lebens mittels eines standardisierten Koffers erfüllen. Dabei stoppt der Anwender durch einen Start-Stopp-Button die Zeit selbst. Anhand der Zeit und der Aktivität wird ein SHAP-Wert berechnet. | SHAP-Wert: +11,4 % |
- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Pröbsting E, Kannenberg A. Alltagsaktivitäten mit der Michelangelo Hand im Vergleich zu konventionellen Myo-Prothesenhänden. Orthopädie Technik, 2014; 65 (9): 54–60
- Luchetti M, Cutti AG, Verni G, Sacchetti R, Rossi N. Impact of Michelangelo prosthetic hand: Findings from a crossover longitudinal study. Journal of Rehabilitation Research and Development, 2015; 52 (5): 605–618
- Belter JT, Segil JL, Dollar AM, Weir RF. Mechanical design and performance specifications of anthropomorphic prosthetic hands: A review. Journal of Rehabilitation Research and Development, 2013; 50 (5): 599–618
- Cutti A, Parel I, Luchetti M, Gruppioni E, Rossi N, Verni G. The Psychosocial and Biomechanical Assessment of Amputees Fitted with Commercial Multi-grip Prosthetic Hands – Case Study: Michelangelo hand. In: Vincenzo P. Castelli, Marco Troncossi (eds). Grasping the Future: Advances in Powered Upper Limb Prosthetics. Oak Park, IL: Bentham E‑Books, 2012: 59–77
- Bertels T, Schmalz T, Ludwigs E. Objectifying the Functional Advantages of Prosthetic Wrist Flexion. Journal of Prosthetics and Orthotics, 2009; 21 (2): 74–78
- Pröbsting E, Kannenberg A. Alltagsaktivitäten mit der Michelangelo Hand im Vergleich zu konventionellen Myo-Prothesenhänden. Orthopädie Technik, 2014; 65 (9): 54–60
- Luchetti M, Cutti AG, Verni G, Sacchetti R, Rossi N. Impact of Michelangelo prosthetic hand: Findings from a crossover longitudinal study. Journal of Rehabilitation Research and Development, 2015; 52 (5): 605–618
- Zheng JZ, De La Rosa S, Dollar AM. An Investigation of Grasp Type and Frequency in Daily Household and Machine Shop Tasks. 2001 IEEE International Conference on Robotics and Automation (ICRA 2011), Shanghai (China), 9–13 May 2011: 4169–4175. 11://dx.doi.org/10.1109/ICRA.2011.5980366 (Zugriff am 25.01.2016)
- Vinet R, Lozac’h Y, Beaudry N, Drouin G. Design methodology for a multifunctional hand prosthesis. Journal of Rehabilitation Research and Development, 1995; 32 (4): 316–324
- Belter JT, Segil JL, Dollar AM, Weir RF. Mechanical design and performance specifications of anthropomorphic prosthetic hands: A review. Journal of Rehabilitation Research and Development, 2013; 50 (5): 599–618
- Luchetti M, Cutti AG, Verni G, Sacchetti R, Rossi N. Impact of Michelangelo prosthetic hand: Findings from a crossover longitudinal study. Journal of Rehabilitation Research and Development, 2015; 52 (5): 605–618
- Cutti A, Parel I, Luchetti M, Gruppioni E, Rossi N, Verni G. The Psychosocial and Biomechanical Assessment of Amputees Fitted with Commercial Multi-grip Prosthetic Hands – Case Study: Michelangelo hand. In: Vincenzo P. Castelli, Marco Troncossi (eds). Grasping the Future: Advances in Powered Upper Limb Prosthetics. Oak Park, IL: Bentham E‑Books, 2012: 59–77
- Pröbsting E, Kannenberg A. Alltagsaktivitäten mit der Michelangelo Hand im Vergleich zu konventionellen Myo-Prothesenhänden. Orthopädie Technik, 2014; 65 (9): 54–60
- Luchetti M, Cutti AG, Verni G, Sacchetti R, Rossi N. Impact of Michelangelo prosthetic hand: Findings from a crossover longitudinal study. Journal of Rehabilitation Research and Development, 2015; 52 (5): 605–618
- Metzger AJ, Dromerick AW, Holley RJ, Lum PS. Characterization of compensatory trunk movements during prosthetic upper limb reaching tasks. Archives of Physical Medicine and Rehabilitation, 2012; 93 (11): 2029–2034
- Cutti A, Parel I, Luchetti M, Gruppioni E, Rossi N, Verni G. The Psychosocial and Biomechanical Assessment of Amputees Fitted with Commercial Multi-grip Prosthetic Hands – Case Study: Michelangelo hand. In: Vincenzo P. Castelli, Marco Troncossi (eds). Grasping the Future: Advances in Powered Upper Limb Prosthetics. Oak Park, IL: Bentham E‑Books, 2012: 59–77
- Bertels T, Schmalz T, Ludwigs E. Objectifying the Functional Advantages of Prosthetic Wrist Flexion. Journal of Prosthetics and Orthotics, 2009; 21 (2): 74–78
