Bei den Betroffenen sind die Nerven der oberen Extremität wirbelsäulennah irreparabel geschädigt, was zu deren schlaffer Lähmung, oft einhergehend mit ausgeprägten Phantomschmerzen, führt. Mit Hilfe der sensorgesteuerten Orthese neo1 (neurorehabilitation exoskeletal orthosis) können der Ellbogen des Anwenders wieder positioniert und eine Greif- und Haltefunktion der Hand fremdkraftbetrieben ausgeführt werden, ohne dass die nicht betroffene Extremität in die Bewegung einbezogen werden muss. Positive Effekte auf die Biomechanik des gesamten Körpers und damit einhergehend eine Entlastung aller bisher einseitig belasteten Strukturen, ebenso wie ein Zugewinn an Funktionalität und eine Reduzierung der Phantomschmerzen sind zu erwarten.
Einleitung
Existierende Versorgungsansätze
Etablierte Versorgungsansätze, die die erheblichen Einschränkungen von Plexus-brachialis-Läsionen im Alltag ausgleichen können, stehen aktuell nicht zur Verfügung. In spezialisierten mikrochirurgischen Zentren kommen verschiedene operative Methoden zum Einsatz, die jedoch nur sehr begrenzt zu funktionsverbessernden Ergebnissen führen. Die Operationsverfahren können zwar zu einer gewissen Beweglichkeitsverbesserung beitragen, es verbleibt jedoch meist eine weitgehende Funktionseinschränkung der oberen Extremität. Betroffene leiden häufig unter neuropathischen Schmerzen, was die allgemeine Lebensqualität zusätzlich drastisch verschlechtert. Oftmals müssen hochdosierte Opiate verabreicht werden, die zu Nebenwirkungen sowie einer Toleranzentwicklung führen.
Die verbreitetsten Hilfsmittel sind passive Orthesen und Bandagen, die den Arm in eine statische Position bringen, um z. B. Fehlstellungen der Gelenke auszugleichen oder dynamische Systeme, die Kontrakturen der Gelenke entgegenwirken und mitunter eine sportliche Aktivität ermöglichen.
Einen neuen Versorgungsansatz bieten mobile, aktive Orthesen. Erste Modelle sind bereits am Markt eingeführt. So stehen Geräte zur Verfügung, die myoelektrisch eine Ellbogenbewegung und die Bewegung von Zeige- und Mittelfinger zum Greifen mit der Hand ermöglichen, wobei die Unterarmrotation und die Beugung des Handgelenks manuell positioniert werden1. Andere Geräte ermöglichen die Bewegung einzelner Finger und des Daumens der Hand, wobei der Ellbogen passiv positioniert werden kann2. Die Nutzung der Geräte hat insbesondere eine mobilisierende und damit therapeutische Wirkung. Die aktuellen Einschränkungen liegen im hohen Gewicht, das auf der zur Luxation neigenden Schulter lastet, bei einer in der Regel stark atrophierten Muskulatur im Schulter- und Armbereich. Das hohe Potential dieser Art von Unterstützungssystemen ist jedoch deutlich erkennbar, ebenso wie eine hohe Akzeptanz bei den Betroffenen, diese Systeme aktiv einzusetzen.
Funktionsbeschreibung neo1
Das in diesem Artikel vorgestellte myoelektrisch gesteuerte Exoskelett neo1 soll dem Betroffenen gestatten, seinen gelähmten Arm aktiv zu bewegen, um einfache Greif- und Haltefunktionen ausüben zu können. Durch einen regelmäßigen Gebrauch werden neben der aktiven Bewegungsunterstützung Stimulationen neuroplastischer Prozesse erwartet, insbesondere im Bereich der somatosensorischen Großhirnrinde, die zu einer deutlichen Reduktion von neuropathischen Schmerzen beitragen. Aus therapeutischen Gesichtspunkten kann die myoelektrisch gesteuerte und aktiv angetriebene Orthese die mobilisierende Bewegungstherapie ergänzen und damit die Beweglichkeit der Gelenke positiv unterstützen. Durch die Wiedereinbindung des Arms in das körpereigene Bewegungsschema wird sowohl die Selbstständigkeit als auch die Lebensqualität Betroffener erheblich verbessert.
Vorarbeiten
Forschungsprojekt OrthoJacket
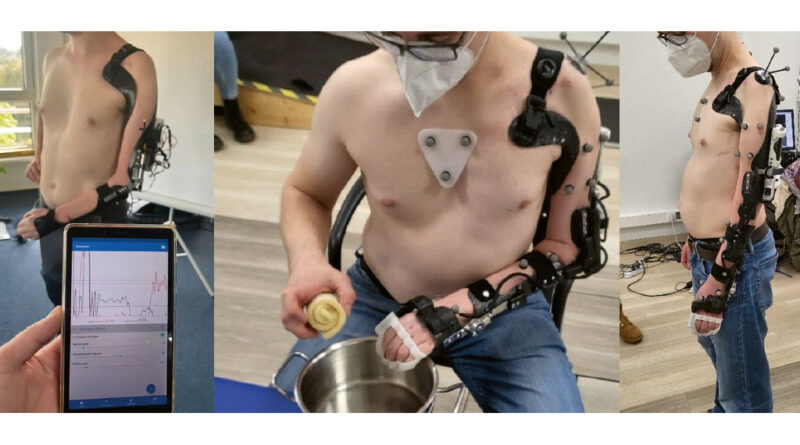
Beeinflusst wurde neo1 durch Arbeiten am Karlsruhe Institut für Technologie (KIT) zum BMBF-Verbundprojekt „OrthoJacket (orthosis jacket) – eine intelligente Hybrid-Orthese für die gelähmte obere Extremität auf Basis der Funktionellen Elektrostimulation und innovativer Fluidaktoren als Therapie- und Unterstützungssystem“ (Abb. 1), das zwischen April 2008 und März 2012 durchgeführt wurde3 4 5. Das Projekt zielte auf die Entwicklung einer modularen, aktiven Orthese für die obere Extremität insbesondere bei tetraplegischen Rückenmarksverletzungen ab, mit dem Ziel, einen funktionslosen Arm wieder weitgehend zu mobilisieren.
Forschungsprojekt Invisible-Grip-Assist
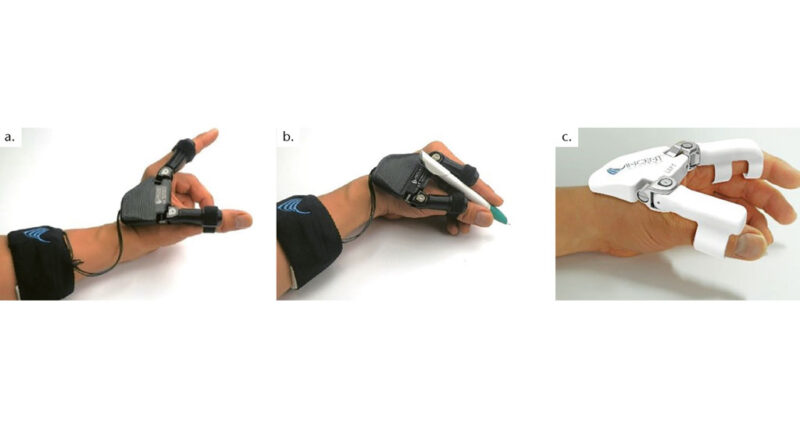
Ein direkter Vorläufer von neo1 war das BMBF-Verbundprojekt „Invisible-Grip-Assist – das alltagstaugliche Assistenzsystem zur aktiven Unterstützung von Patienten mit eingeschränkter HandbewegIichkeit“ (Abb. 2), das im Zeitraum April 2012 bis März 2015 gefördert wurde6. Als Ergebnis wurde eine myoelektrisch gesteuerte Orthese für die Hand entwickelt, die Daumen und Langfinger mittels Elektromotoren bei einer Greifbewegung unterstützt oder diese bei einer funktionslosen Hand auch vollständig ersetzt.
Forschungsprojekt neo
Die Entwicklung einer myoelektrischen, aktiven Orthese der oberen Extremität wird wissenschaftlich begleitet durch das BMBF-Verbundprojekt: „neo (neurorehabilitation exoskeletal orthosis) – sensorgesteuerte aktive Orthese für die obere Extremität“ (Abb. 3); das Projekt startete im April 2021. Vincent Systems entwickelt im Projekt die technischen Voraussetzungen, der klinische Partner, die BG Unfallklinik Ludwigshafen, führt derzeit eine 12-monatige klinische Studie mit bis zu 20 Patienten durch mit der Zielsetzung: „Klinische Evaluation der sensorgesteuerten aktiven Orthese für die obere Extremität bei Plexus brachialis Verletzungen bezüglich Funktionalität, Lebensqualität und Schmerzen und kortikaler Repräsentation.“ Der Projektpartner, die Charité-Universitätsklinik Berlin, verfolgt im Rahmen der Forschungsarbeiten die Zielstellung: „Klinische Validierung einer Hybriden Kortikoid-muskulär (durch Gehirnareale stimulierte Muskulatur) gesteuerten Orthese zur Wiederherstellung sensomotorischer Funktion.“ Der Schwerpunkt der Arbeiten liegt u. a. auf der Umsetzung alternativer Steuerungsstrategien mittels Biosignalen aus EOG und EEG. Zusammen mit dem Projektpartner Orthopädietechnik Brunner GmbH in Ludwigshafen (Christoph Hösch, Orthopädietechnikermeister) werden die Orthesen individuell angefertigt und die Anwender während der stationären Rehabilitation/Orthesengebrauchsschulung begleitet.
Aufbau und Funktionsbeschreibung neo1
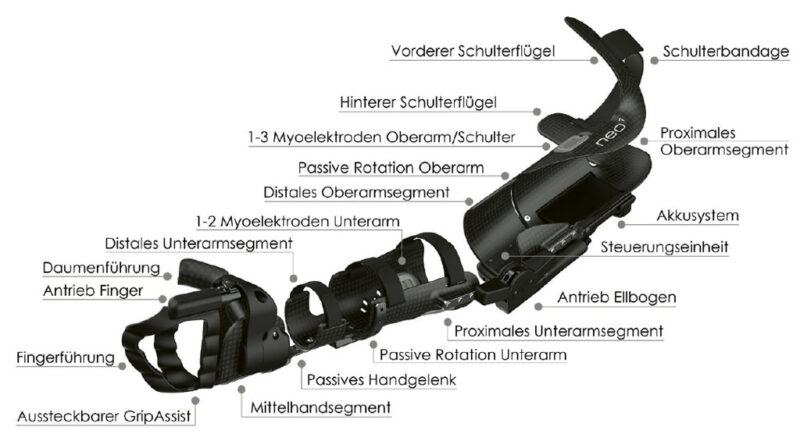
Das myoelektrisch gesteuerte Exoskelett neo1 hat inkl. Akku ein Gewicht von ca. 1200 g. Die maximale Aufbauhöhe beträgt 30 mm, die Hebekraft des Ellbogens, gemessen an der Hand, beträgt 15 N, die Greifkraft in der Hand beträgt 50 N. Das System kann selbstständig vom Nutzer angelegt und aufgrund der sehr schlanken Gestaltung auch unter der Bekleidung getragen werden. Die im Folgenden beschriebene erste Ausführungsvariante ist seit Ende 2022 im klinischen Einsatz. Das aktive Orthesensystem ist modular aufgebaut, d. h., einzelne Komponenten können separat eingesetzt oder aus der Versorgung herausgenommen werden. Das Komplettsystem besteht aus zwei Oberarm- und zwei Unterarmsegmenten sowie einer Führung für den Daumen und die Langfinger. Die Segmente und Führungen sind teils über passive und teils über aktive Gelenke miteinander verbunden (Abb. 4).
Beginnend mit dem proximalen Oberarmsegment besteht dieses aus einer medio-dorsalen Humerusanlage sowie einer thorakalen Spange. Ein Gurtsystem reponiert die subluxierte Schulter und sorgt für eine gute Schulterkontrolle und Stabilität. Ferner kann so komplett auf eine Bandagenführung kontralateral verzichtet werden, was nicht nur das Orthesen-Handling signifikant vereinfacht. Auch kann hierdurch die Orthese unauffällig unter der Bekleidung getragen werden. Dorsalseitig des Oberarmsegments befindet sich der Einlegerahmen des Wechselakkus. Das distale Oberarmsegment ist um die Oberarmachse rotatorisch über ein Bogenlager mit dem proximalen Oberarmsegment schwenkbar verbunden. Dieses ermöglicht eine Humeralrotation aus der Innen- in die Außenrotation.
Die Antriebseinheit des Ellbogens und die dorsal positionierte Steuerungselektronik sind fest mit dem dis-talen Oberarmsegment verbunden. Das aktive Ellbogengelenk verbindet das distale Oberarm- mit dem proximalen Unterarmsegment. Auch der Unterarm ist in zwei Segmente eingeteilt. Beide Unterarmsegmente sind um die Unterarmachse rotatorisch über ein Bogengleitlager miteinander schwenkbar verknüpft. Das passive Handgelenk gestattet eine stufenlose Positionierung der Hand bei einstellbarer Friktion. Das Mittelhandsegment ist ulnarseitig mit dem passiven Handgelenk verbunden, zusammen mit der Daumenführung fixiert es Hand und Daumen in einer für das Greifen optimalen Stellung. Dorsalseitig des Mittelhandsegments ist der abnehmbare GripAssist, bestehend aus Fingerführung und Antriebseinheit, positioniert, welcher die Langfinger myoelektrisch zum opponierten Daumen bewegt.
Steuerungsoptionen: myoelektrisch mit 1–5 Sensoren
Die Funktionen der Orthese können mit ein bis fünf EMG-Sensoren gesteuert werden. Idealerweise kommen diese auf dem Musculus biceps brachii zur Ellbogenflexion, dem Musculus triceps brachii zur Ellbogenextension sowie auf den Flexoren des Unterarms zum Schließen und den Extensoren des Unterarms zum Öffnen des GripAssist zum Liegen (Abb. 5). In dieser Konstellation lassen sich alle Funktionen separat ansteuern. Bei den ersten Versorgungen wurde schnell deutlich, dass dies bei einem Plexusausriss eher selten anzutreffen ist, denn häufig sind nur wenige Signale vorhanden, die sich zudem überlagern. Die Steuerung des gesamten Systems ist daher auch über nur ein Muskelsignal möglich. In diesem Falle wird über ein vereinbartes Triggersignal zwischen den Gelenken geschaltet. Stehen keinerlei geeignete Muskelsignale zur Verfügung, kann das System auch über eine Bewegungssteuerung mit einer Smartwatch gesteuert werden. Aktuell sind 10 verschiedene Steuerungsmodi vorhanden.
Mode 1: 1‑Elektroden-Steuerung. Ellbogen und Hand werden mit einer Elektrode gesteuert, das Umschalten zwischen den Gelenken erfolgt mit einem Trigger.
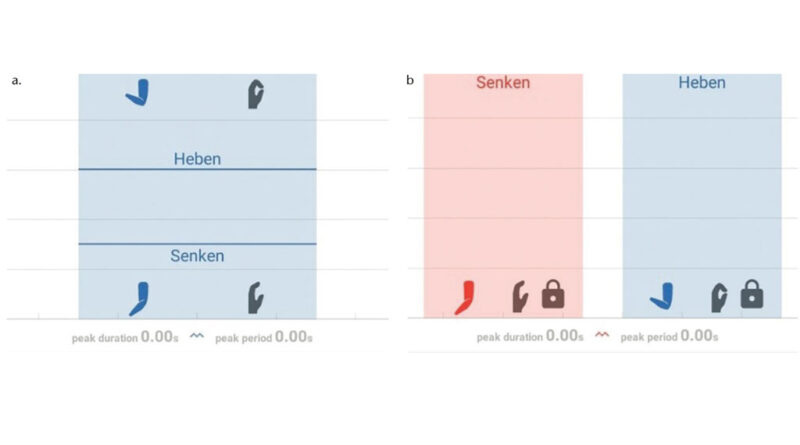
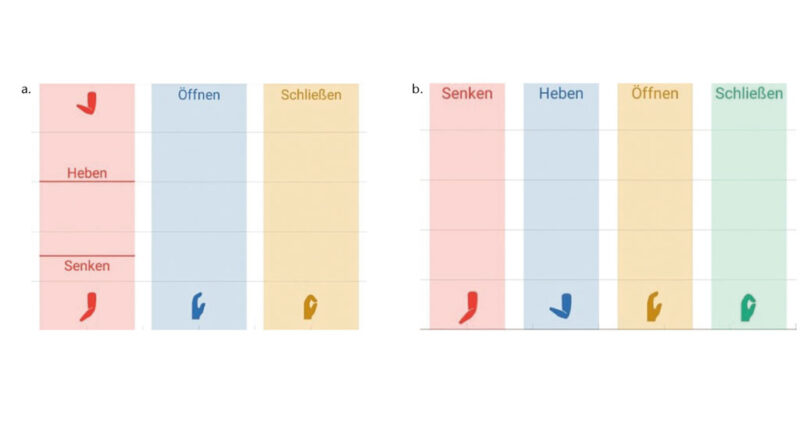
Mode 2 bis 4: 2‑Elektroden-Steuerung. Ellbogen und Hand werden mit zwei Elektroden in einer Ebene (Oberarm oder Unterarm) sequenziell oder beiden Ebenen (Oberarm und Unterarm) simultan gesteuert, das Umschalten zwischen den Gelenken erfolgt mit einem Trigger (Abb. 6).
Mode 5 bis 8: 3‑Elektroden-Steuerung. Der Ellbogen wird mit einer Elektrode und die Hand wird mit zwei Elektroden simultan gesteuert. Die Kombination kann beliebig gewählt werden.
Mode 9: 4–5‑Elektroden-Steuerung. Ellbogen und Hand werden mit jeweils zwei Elektroden gesteuert, die beiden aktiven Gelenke können simultan angesteuert werden. Bei Vorhandensein eines weiteren Signals B. im Schulterbereich, kann dieses als Trigger eingesetzt werden (Abb. 7).
Mode 10: Controller-Agent-Steuerung. Bei Nichtvorhandensein von geeigneten Muskelsignalen kann die Steuerung über eine am unverletzten Arm getragene Smartwatch erfolgen. Es handelt sich dabei um eine Bewegungssteuerung. Dabei kann durch eine Geste die Steuerung ein- und ausgeschaltet werden. Nach der Aktivierung folgt die Orthese in ihren Bewegungen den Bewegungen des Handgelenks, an dem die Uhr getragen wird (Abb. 8).
Versorgungsbeispiele
Anpassung der Orthesensegmente an den Patienten
Für eine funktionsgerechte Passform werden alle Orthesensegmente individuell angefertigt. Die Oberarmsegmente werden in einem Spiralzuschnitt geformt, der den Einstieg in die Orthese nur bei innenrotierter Schulter ermöglicht. Am proximalen Oberarmsegment muss hier auf die exakte Stellung der Flügel geachtet werden: Der vordere Flügel darf bei keiner Schulterbewegung Kontakt zur Clavicula aufweisen. Der hintere Flügel fasst sicher die Scapula. Verbunden sind diese mit einer medialen flächigen Anlage des Humerus bei anatomisch geformten Radien des Achselbereichs. Hierdurch wird eine laterale Bewegung der Orthese verhindert. In diesem Segment können Signale vom M. biceps brachii, M. triceps brachii, der Pars clavicularis oder der Pars spinalis des M. deltoideus abgenommen werden.
Im proximalen Unterarmsegment können Signale des Extensors und des Flexors abgegriffen werden. Ein besonderes Augenmerk ist auf die Drehpunkte zu legen. Ebenso auf die Opposition der Langfinger/Daumen und auf eine ausreichende Öffnungsweite. Letzteres stellt sich bei Kontrakturen mitunter schwierig dar und bedarf einer gesonderten Lösung.
Formerfassung
Alle Formerfassungen erfolgen mittels eines Gipsabdrucks in einer 3‑Phasen-Technik. Zunächst erfolgt der Abdruck von Mittelhand/Unterarm in Funktionsstellung, wobei hier auf eine Opposition des Daumens bei maximaler Öffnungsweite D1 zu D2 geachtet werden muss. Es folgen Unterarm und Oberarm bei extendiertem Ellbogen, innenrotierter Schulter und Neutral-Null-Stellung Pronation/Supination. Abschließend erfolgt die Schulterfassung mittels flügelartiger Auflagen an Brust und Schulter bei reponiertem Schultergelenk.
Anfertigung
Alle Orthesen sind in der CFK-Technik angefertigt.
Fallbeschreibungen
Patient 1 – 2‑Elektroden-Steuerung
Der erste Anwender ist 34 Jahre alt. 2014 erlitt er bei einem Motorradunfall einen traumatischen Plexusausriss links C5-Th1. 2015 erfolgten zwei Nerventransplantationen mit Nervus-suralis-Interponaten.
Er lebt allein und organisiert seinen privaten und beruflichen Alltag als Fachinformatiker selbstständig. Als Para-Sportkletterer bewältigt er einarmig höchste Schwierigkeitsgrade. Bereits vor der Versorgung hatte der Anwender keine Phantomschmerzen mehr und beschrieb seine Sensibilität lediglich als drückend kribbelnd. Er nimmt keine Schmerzmittel. Neben seinem Sport geht er zweimal wöchentlich zur Physiotherapie und zweimal zur medizinischen Trainingstherapie. Es zeigt sich eine deutlich reduzierte Sensibilität. Die linke Schulter ist subluxiert. Der Anwender ist Rechtshänder. Es zeigt sich eine Außenrotationskontraktur im Schultergelenk, eine reduzierte Flexion der Finger in den MCP-Gelenken sowie eine reduzierte Daumenbeweglichkeit. Es besteht eine Restkraft im Ellbogen, wenn dieser zuvor passiv in 90° positioniert wurde (Janda 3), im Handgelenk in Flexion (Janda 3), in den Fingern D4 und D5 in Flexion (Janda 3).
Die Ansteuerung der neo1-Orthese erfolgt über 2 EMG-Sensoren, der Ellbogen mit einer Elektrode (M. biceps brachii), die Hand mit einer Elektrode (M. extensor carpi ulnaris). Somit kann der Anwender beide Gelenke simultan ansteuern und erstmals wieder den Arm aktiv beugen und Gegenstände greifen (Abb. 9). Er trägt die Orthese seit Februar 2023 und nutzt diese täglich für ca. 2 Stunden im häuslichen Umfeld, insbesondere bei bimanuellen Tätigkeiten beginnend beim Frühstück mit dem Halten der Butter, des Marmeladenglases, beim Brotschneiden und ‑schmieren, aber auch bei der Hausarbeit, wie z. B. beim Zusammenlegen der Wäsche. Eine Herausforderung bei dieser Versorgung war das Beseitigen von Druckstellen auf Grund der fehlenden Sensorik und Rückmeldung.
„Die Orthese ist eine echte Erleichterung, wenn Gegenstände mit zwei Händen gegriffen und bearbeitet werden“, so der Anwender.
Patient 2 – Controller Agent, Smartwatch
Der zweite Anwender ist 35 Jahre alt. 2011 erlitt dieser ebenfalls bei einem Motorradunfall einen traumatischen Plexusausriss rechts C5-Th1. 2012 erfolgte ein Nerventransfer C5 und C6 mit Suralis-Interponat. Jedoch kam es nie zu einer Reinnervation. Derzeit lebt er allein, bewältigt seinen Alltag selbstständig und ist als Elektrokonstrukteur voll berufstätig. In seiner Freizeit beschäftigt er sich mit der Renovierung seines Hauses sowie der Gartengestaltung. Bei einer Schmerzskalierung von 5 (VAS) nimmt er täglich Schmerzmedikamente, therapiert zusätzlich mit Akupressur. Den Phantomschmerz beschreibt er als stechend und kribbelnd, er hat das Gefühl einer Quetschung und Juckreiz. Er geht zweimal wöchentlich zur Physiotherapie. Erhaltene Sensibilität verspürt er lediglich am distal-medialen Oberarm. Der Anwender ist Rechtshänder, der Arm hat keinerlei Restfunktion. Das Schultergelenk ist subluxiert. Es zeigt sich eine limitierte Ellbogenbeugung, eine limitierte Pro-/Supination sowie eine eingeschränkte Handgelenks‑, Finger- und Daumenbeweglichkeit. Die Orthese trägt der Anwender seit 2 Monaten. Die Ansteuerung der neo1-Orthese erfolgt erstmals über Controller Agent, eine Smartwatch-Gestensteuerung. Durch eine Geste wird die Steuerung aktiviert. Beugt der Anwender nun den gesunden Arm, beugt sich auch das Ellbogengelenk der Orthese; streckt er den gesunden Arm, streckt sich auch das Gelenk. Supiniert er den gesunden Arm, öffnet sich der Grip-Assist, proniert er diesen, schließt sich der GripAssist. Auch können beide Gelenke simultan gesteuert werden (Abb. 10).
Ein eigenständiges Orthesen-Handling war bereits, wie übrigens bei allen Anwendern, innerhalb der ersten Anproben möglich. Von der Orthese und der Technologie ist der Anwender begeistert. Die Ansteuerung beherrscht er einwandfrei. Die limitierte Ellbogenbeugung wurde durch einen Gelenkanschlag übernommen. Ebenso wäre dies, wenn nötig, auch in Extension möglich. Bei der Übergabe von Gegenständen von der linken in die rechte Hand tut er sich schwer. Durch die Ablenkung der linken Hand, der jahrelangen kompensatorischen Mechanismen und durch die fehlende Sensorik nutzt er die Orthese derzeit nur stundenweise zur Therapie.
Patient 3 – 1‑Elektroden-Steuerung
Der dritte Anwender ist 53 Jahre alt. 1987 erlitt er bei einem Mopedunfall einen Plexusausriss links. Im Januar 1988 erfolgte ein Revitalisierungsversuch des N. musculo-cutaneus und des N. medianus durch Anastomosierung mit den Nn. intercostales 3, 4 und 5 mittels Suralis-Interponat. Seinen Haushalt führt er selbstständig. Er ist als Ingenieur voll erwerbstätig, bei primär sitzender Tätigkeit. In seiner Freizeit fährt er Liegefahrrad und Ski.
Auf Grund von phasenweisem Auftreten von Phantomschmerzen seiner Phantomhand nimmt er bei Bedarf Schmerzmedikamente. Zudem geht er zweimal wöchentlich zur Physiotherapie. An Sensibilität verspürt er lediglich Berührungen des dorsalseitigen Oberarms. Die linke Schulter ist subluxiert. Der Anwender ist Rechtshänder, hat keinerlei Restkraft im Arm. Es liegen eine Kontraktur der Außenrotatoren im Schultergelenk, eine limitierte Supination sowie Fingerextension vor.
Die Ansteuerung der neo1-Orthese erfolgt über einen EMG-Sensor. Dabei werden Ellbogen und Hand mit einer Elektrode im hinteren Flügel (M. deltoideus, Pars spinalis) kontrolliert. Ein Umschalten zwischen den Gelenken erfolgt mittels Triggersignal.
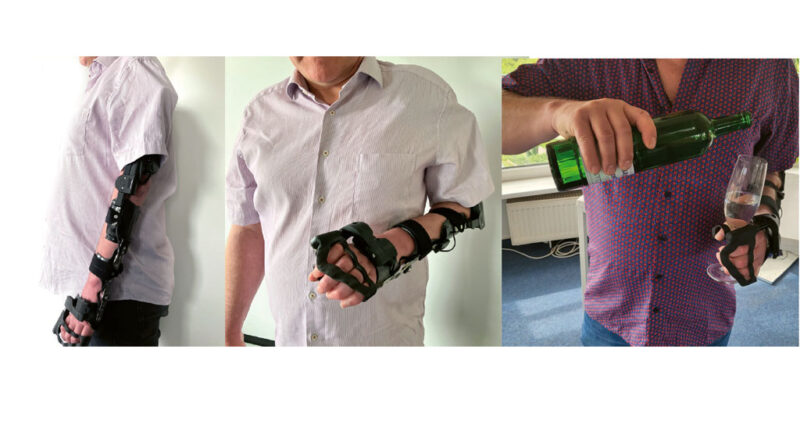
Der Patient nutzt die Orthese täglich gut 8 Stunden und versucht, den linken Arm und die Handfunktion in den Arbeitsalltag weitgehend zu integrieren. In seinem Trageprotokoll vermerkt er bereits vereinzelt Tragezeiten von 16 Stunden, auch bei einer 85 km langen Liegeradtour wurde das System durchgehend getragen. Der linke Arm dient primär als Assistenz für den rechten Arm zum Halten und Fixieren von Gegenständen im GripAssist und bei gebeugtem Ellbogen zum Halten von Brötchen, Schraubendreher und Gläsern beim Einschenken (Abb. 11). Das System neo1 stellt bereits heute, 6 Wochen nach Auslieferung, eine deutliche Erleichterung des Alltags dar. Zudem spürt er eine positive Veränderung zur Wahrnehmung seiner Phantomhand. Nicht zuletzt weckt die Versorgung auch die Hoffnung und Motivation, den Arm langfristig noch mehr einsetzen zu können.
Fazit
Mit dem myoelektrischen Exoskelett neo1 steht ein leistungsfähiges, aktives Orthesensystem zur Verfügung, das Patienten mit Lähmungen im Arm- und Handbereich einen Zugewinn an Mobilität und Funktionalität bietet, die Reduzierung von Phantomschmerzen unterstützt und das biomechanische Gleichgewicht im Körper fördert. Bereits im kurzen Studienverlauf konnten zahlreiche neurologische wie auch physiologische Veränderungen beobachtet werden, die einen positiven Effekt für den Anwender bedeuten und die auf das hohe Potential des neuen Systems schließen lassen.
Die ersten Versorgungen haben aber auch aufgezeigt, wie individuell jeweils die Orthese angepasst werden muss, um einen Mehrwert für den Anwender zu erreichen. Insbesondere der Wunsch der Anwender nach einem selbstständigen An- und Ablegen der Orthese muss Berücksichtigung finden. Das geringe Gewicht und die geringe Aufbauhöhe in Verbindung mit einer kraftvollen Bewegung sind neben der passgenauen Form der Orthese die wichtigsten Parameter für die Anwender bezüglich Alltagsnutzen.
Hinweise
Die projektbegleitenden Forschungsarbeiten sowie die klinische Studie werden im Rahmen des BMBF-Verbundprojekts „neo“ durch die Bundesrepublik Deutschland mit Mitteln des Bundesministeriums für Wirtschaft und Energie gefördert.
Interessenkonflikt
Beide Autoren gehören dem Herstellerunternehmen von neo1 an.
Die Autoren:
Dr. Stefan Schulz
Geschäftsführer
Vincent Systems GmbH
Breite Str. 155
76135 Karlsruhe
s.schulz@vincentsystems.de
Simon Rosewich
Orthopädietechniker-Meister
Vincent Systems GmbH
s.rosewich@vincentsystems.de
Begutachteter Beitrag/reviewed paper
Schulz S, Rosewich S. Neue Versorgungsmöglichkeit bei Läsion des Plexus brachialis durch ein myoelektrisch gesteuertes Exoskelett: neo1. Orthopädie Technik, 2023; 74 (8): 56–63





- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Matyssek S, Hepp D. Greifen trotz Handlähmung — Versorgungsbeispiel mit myoelektrischer Handorthese. Orthopädie Technik, 2021; 72 (7): 44–48
- Hano K. Testversorgung mit einer myoelektrischen Armorthese anhand eines Fallbeispiels. Orthopädie Technik, 2021; 72 (4): 36–39
- Schulz S et al. Design of a Hybrid Powered Upper Limb Orthosis. In: Dössel O, Schlegel WC (Hrsg.). World Congress on Medical Physics and Biomedical Engineering. 7.–12. September 2009, Munich, Germany. IFMBE Proceedings 25/9. Berlin, Heidelberg: Springer, 2009: 468–471
- Schill O et al. OrthoJacket: An active FES-hybrid orthosis for the paralysed upper extremity. Biomedizinische Technik/Biomedical Engineering, 2011; 56 (1): February 2011, 35–44
- Schulz S et al. The hybrid fluidic driven upper limb orthosis – OrthoJacket. In: MEC 11, Proceedings of the 2011 Myo Electric Controls/Powered Prosthetics Symposium Fredericton, New Brunswick, August 2011: 14–19
- Schulz S. Das alltagstaugliche Assistenzsystem zur aktiven Unterstützung von Patienten mit eingeschränkter Handbeweglichkeit: Grip Assist. Schlussbericht: Teilvorhaben „Motion Grip“, BMBF-Verbundprojekt, FKZ 16SV5816K, Technische Informationsbibliothek (TIB). Karlsruhe: Vincent Systems GmbH, 2015
