Einleitung
Bisher traten aktive Exoskelette im Besonderen zur Mobilitätsverbesserung, zur Kraftunterstützung oder zu therapeutischen Zwecken – meist im Bereich der unteren Extremitäten – in Erscheinung. Der Fokus liegt dabei überwiegend auf einem konfektionierten, aber anpassbaren Aufbau 1 2 3. Bei kurzer Anwendungsdauer spielt eine individuelle Passform oft nur eine untergeordnete Rolle – dieser Umstand verändert sich jedoch drastisch, sobald eine alltagstaugliche, dauerhafte Bewegungsunterstützung erzielt werden soll. Der Schlüssel dazu liegt in einer Kombination aus industriell hergestellten leistungsstarken Baugruppen aus den Bereichen Steuerungs‑, Antriebs- und Verbindungstechnik und einer individuellen Körperanbindung. In der Technischen Orthopädie wird dieses Vorgehen seit Jahrzehnten vor allem in der Prothetik sehr erfolgreich umgesetzt. Für die Verwirklichung aktiver Orthesen fehlten allerdings bislang schlicht die entsprechenden Passteile – Exoskelette für die obere Extremität kamen bis jetzt meist nur im Rahmen von Forschungsvorhaben im Bereich Therapie 4 oder als stationäre Robotersysteme 5 zum Einsatz. Ein im Alltag anwendbares bewegungsunterstützendes System stellt die „MyoPro“-Orthese dar 6.
Mit den Produkten des Unternehmens HKK Bionics besteht nunmehr die Möglichkeit, eine vollständig individuelle Handorthese (Modell „exomotion® hand one“) zu verwirklichen, mit deren Hilfe sechs Griffmuster (Daumengriff, Drei-Finger-Griff, Faustgriff, Mausgriff, Tastaturgriff, Zwei-Finger-Griff) ausgeführt werden können. Durch eine direkte Integration der entsprechenden Baugruppen in den individuellen Orthesenaufbau entsteht neben einer individuellen Passform ein schlankes, leichtes und dennoch leistungsstarkes Hilfsmittel. Im Zuge des Herstellungsprozesses kommen überwiegend digitale Fertigungsverfahren zum Einsatz: Neben klassischer Gipstechnik zur Abformung der individuellen Handstruktur wird auf 3D-Scanverfahren, Silikontechnik, CAD-Konstruktion und 3D-Druck zurückgegriffen. Mögliche Indikationen, die eine derartige Versorgung begründen, sind distal betonte Lähmungen der oberen Extremität mit geringer Spastik. In Frage kommende Ursachen hierfür sind beispielsweise Verletzungen im Bereich des Plexus brachialis, degenerative Erkrankungen und Schlaganfälle. Im Folgenden wird anhand eines Fallbeispiels ein möglicher Versorgungsweg mit einer aktiven Handorthese beschrieben.
Fallbeschreibung
Der versorgte Patient ist 33 Jahre alt und leidet seit 2014 an einer sehr langsam fortschreitenden Sonderform der Amyotrophen Lateralsklerose (ALS) mit Ausbildung eines Flail-Arm-Syndroms beidseits. Er führt seinen Haushalt noch selbstständig, ist voll berufstätig und dort überwiegend im Büro tätig. Das Versorgungsziel besteht primär darin, seine Selbstständigkeit im Alltag zu verbessern bzw. zumindest zu bewahren und seine noch vorhandenen Bewegungsfähigkeiten so gut als möglich zu erhalten. Im Speziellen sollen das Greifen und das sichere Halten von Besteck und anderen Gegenständen ermöglicht werden. Der Patient ist Rechtshänder, die Restkraft in beiden Armen tagesformabhängig, jedoch überwiegend gering vorhanden. Beide Arme sind bis zu den Schultern von der Bewegungseinschränkung betroffen. Entgegen der meist schulter- und oberarmbetonten Symptomatik des Flail-Arm-Syndroms verfügt der versorgte Patient über deutliche Restfunktionen in der Schulter und im Oberarm, bis auf die Beugung des Ringfingers rechts jedoch über keine Funktion mehr im Bereich der Finger. Eine Flexion und Extension im Ellenbogen mit Kraftgrad Janda 3 kann eigenständig ausgeführt werden; erreicht wird die endgradige Beugung aber nur durch eine Körperverlagerung nach hinten.
Versorgungsverlauf
Hilfsmittelplanung und Anamnese
Im Vorgespräch wird die grundsätzliche Eignung des Patienten zur Nutzung des Hilfsmittels geklärt. Ausgeprägte Kontrakturen oder ein hoher Muskeltonus stellen Kontraindikationen dar. Ein potenzieller Anwender muss nach Herstellervorgaben zudem älter als 18 Jahre und kognitiv imstande sein, die Hilfsmittelverwendung und ‑steuerung zu begreifen. Darüber hinaus muss eine grundsätzliche Bewegungsfähigkeit in den MCP-Fingergelenken gegeben sein. Für die EMG-Steuerung des Orthesensystems „exomotion® hand one“ muss zudem eine Muskelpartie gefunden werden, an der eine Amplitude in ausreichender Höhe detektiert werden kann. Aus diesem Grund empfiehlt es sich, bereits zu Beginn einen Myotest durchzuführen, um eine geeignete Position für den EMG-Sensor zu finden.
Sowohl im Bereich der Handgelenksflexion (Musculus flexor carpi ulnaris) als auch der Handgelenksextension (Musculus extensor carpiradialis) lässt sich beim vorgestellten Patienten ein EMG-Signal ermitteln, das zu Steuerungszwecken genutzt werden kann. Aufgrund der Bewegungseinschränkung bis zu den Schultergelenken ist eine Oberarmfassung zwingend nötig. Um einen festen Sitz der Oberarmanbindung zu gewährleisten, wird zusätzlich auf einen Schultergurt zurückgegriffen. Zur Kraftunterstützung der Flexion im Ellenbogen findet das Gelenk „CDS-360°“ (Albrecht GmbH) zur dynamischen Redression Anwendung.
Abformtechnik
Die Abformung der Hand sowie des Oberarms erfolgt in klassischer Weise mittels Gipstechnik. Die Fingeranbindungen werden aus HTV-Silikon hergestellt; daher bietet sich das Arbeiten mit feinporigem Gips ohnehin an. Bei der Gipsabdrucknahme gebührt der Fingerstellung ein besonderes Augenmerk. Zur korrekten Funktion der Orthese „exomotion® hand one“ gibt der Hersteller Position und Winkel der Fingergelenke exakt vor: Die MCP-Gelenke müssen gestreckt sein (0°), PIP und DIP leicht gekrümmt (PIP 30–45° Flexion, DIP 5–15° Flexion). Der Daumen wird im Zuge dessen nach außen gedreht und in leicht erhöhte Opposition zum Zeigefinger gebracht (geöffneter Schlüsselgriff).
Produktion in der OT-Werkstatt
Eine grundsätzliche Herausforderung bei der Versorgung mit kraftunterstützenden Orthesen besteht darin, die applizierte Kraft möglichst effizient und zielgerichtet anzulegen und die resultierende Bewegung zu lenken. Das vorgestellte System löst diese Herausforderung durch seine modular aufgebaute Exomechanik, die in die Silikon-Fingeranbindung eingebettet wird. Die Exomechanik ist in zwei wichtige Segmente unterteilt:
- Die Gelenksegmente erlauben das Beugen und Strecken der Finger (im MCP-Gelenk ist bis zu 90° Flexion möglich).
- Die Linearsegmente verfügen über einen translatorischen Freiheitsgrad und gleichen die Längenänderung des menschlichen Fingers bei der Flexion aus. Dadurch wird eine Relativverschiebung der Exomechanik gegenüber dem Finger vermieden. Durch eine Anpassung ihrer Anzahl und ihrer Art kann auf die Fingergröße reagiert werden. Dabei werden bis zu 7N Kraft orthogonal zum Fingerrücken eingeleitet.
Während die Kunststoffteile der Exomechanik im Baukastensystem des Herstellers mitgeliefert werden, muss die Fingeranbindung aus HTV-Silikon handwerklich erstellt werden. Zur Stabilisierung der Fingerglieder im distalen Bereich der Silikonfingerlinge wurde im hier beschriebenen Fall zusätzlich mit Carbon-Prepreg-Einlagen gearbeitet. Silikon und Fingermechanik können farblich nach Patientenwunsch aufeinander abgestimmt werden (Abb. 1a u. b).
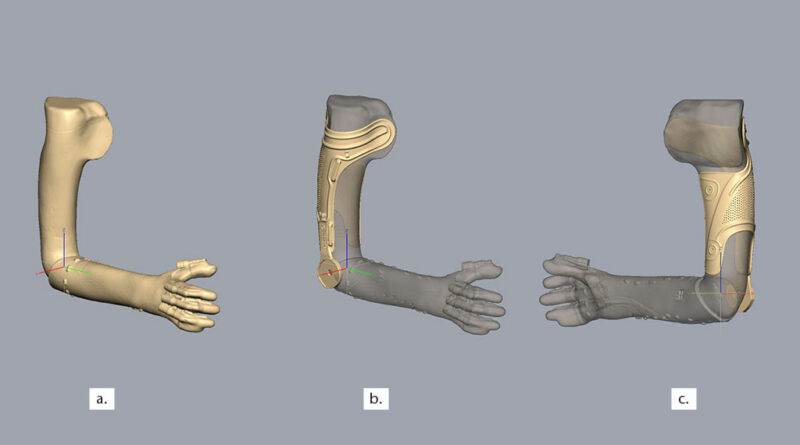
Die folgenden Produktionsschritte werden digital durchgeführt. Zu diesem Zweck wird ein 3D-Scan des Gipspositivs inklusive Fingeranbindung (Silkonfingerlinge + Exomechanik) angefertigt. Es bietet sich an, wichtige Markierungen für die Konstruktion von Unterarmschiene und Oberarmmanschette auf dem Gipspositiv zu markieren und dadurch beim Scannen direkt zu erfassen. Im Bereich der Unterarmschiene kommen vorgefertigte Schablonen zum Einsatz, die dem Baukastensystem beiliegen. Mit deren Hilfe können die Markerpunkte auf dem Modell festgelegt werden, die für die folgende Konstruktion relevant sind, da sie unter anderem den Verlauf der Unterarmschiene definieren. Die Oberarmanbindung wird nach individuellen Bedürfnissen – ausgehend vom erstellten Scanmodell und der Anamnese – in Eigenverantwortung des Versorgers im Rahmen der Sonderanfertigung konstruiert und ist nicht Bestandteil des Lieferumfangs der Firma HKK Bionics. Das dynamische Redressionsgelenk kann auf diese Weise direkt in die Konstruktion eingebettet werden und wird in diesem Fall über das Verbindungselement „coniungi“ der Firma Albrecht GmbH mit der Armschiene verbunden (Abb. 2a–c).
Produktion beim Passteilhersteller
Die individuelle Unterarmschiene mit Aufnahmestellen für die Antriebe, die Befestigungsgurte und die Exomechaniken wird parallel vom Systemhersteller für die erste Anprobe konstruiert. Im Zuge dessen werden Details wie z. B. die Positionierung der Schlaufen für Befestigungsmaterial mit dem Orthopädietechniker bzw. der Orthopädietechnikerin abgesprochen. Auf Anfrage sorgt der Hersteller für die nötige Koordination mit dem Druckdienstleister, um das Oberarmteil innerhalb desselben Auftrags wie die Unterarmschiene per 3D-Druck zu erstellen und zu färben. Zum Einsatz kommt dabei der bereits ausgiebig in der Praxis erprobte SLS-Prozess (SLS = Selektives Lasersintern) mit dem Werkstoff Polyamid 12 (PA 12). Die Färbung der Bauteile erfolgt nach Kundenwunsch und ebenfalls im selben Prozess. Auf diese Weise wird sichergestellt, dass sowohl ein annähernd gleiches Materialverhalten (derselbe Druckraum) als auch die gleiche Farbgebung erreicht werden kann (derselbe Färbeprozess). Die 3D-gedruckten Materialien sind wie auch die Färbung inkl. Farbstoffe nach ISO 10993–5/-10 biokompatibel zertifiziert.
Im Rahmen der Versorgung wird standardmäßig mit der Konstruktion einer ersten Armschiene zur Probe und einer zweiten Armschiene zur Definitivversorgung geplant. Besteht nach der Anprobe Optimierungsbedarf, kann dieser in der zweiten Armschiene umgesetzt werden.
Beschreibung des Gesamtsystems
Der gesamte Aufbau des aktiven Orthesensystems lässt sich im hier vorgestellten Anwendungsbeispiel in 5 Funktionseinheiten unterteilen (Abb. 3a u. b; vgl. die entsprechenden Nummern in Abb. 3b):
- Oberarmanbindung mit Schultergurt zur Stabilisierung der Schulterrotation und mitgedruckter Gelenkaufnahme
- Gelenkpassteil mit Trennmechanismus zur Anbindung der Unterarmschiene
- Unterarmschiene, bestehend aus Antriebspaket mit Sehnen (diese fungieren mechanisch gesehen als flexible Zug- und Druckstäbe) und in das Polster integriertem EMG-Sensor
- Silikonfingerlinge mit außenliegender, ins Silikon integrierter Exomechanik, die durch die bidirektionalen Sehnen gestreckt (Zug auf der Sehne) und gebeugt (Schub auf der Sehne) werden können
- Bedieneinheit mit Akku und Touch-Display (wird am Gürtel getragen, ermöglicht verschiedene Einstellungen und die Visualisierung des EMG-Signals zum Erlernen der Steuerung)
Anprobe mit Patient
Bei der Anprobe mit dem Patienten werden das Anlegen des Hilfsmittels, dessen Funktionalitäten sowie die Bedienung der Orthese erläutert und die entsprechenden Softwareparameter eingestellt. Anschließend wird das Greifen verschiedener Therapiegegenstände (Kegel, Bälle, Schaumstoff) sowie alltäglicher Gegenstände durchgeführt.
Insbesondere das Anlegen der Orthese muss mit dem Anwender geübt werden. Für einseitig Betroffene stellt das Anziehen der Unterarmschiene sowie das Anlegen der Oberarmanbindung bei vorherigen Versorgungen nach kurzer Zeit kein Problem mehr dar. Die beidseitig stark ausgeprägte Bewegungseinschränkung des hier vorgestellten Patienten macht das selbstständige Anlegen von Hilfsmitteln im derzeitigen Zustand jedoch noch unmöglich (Abb. 4–7).
Diskussion /praktische Evaluation des Versorgungsergebnisses
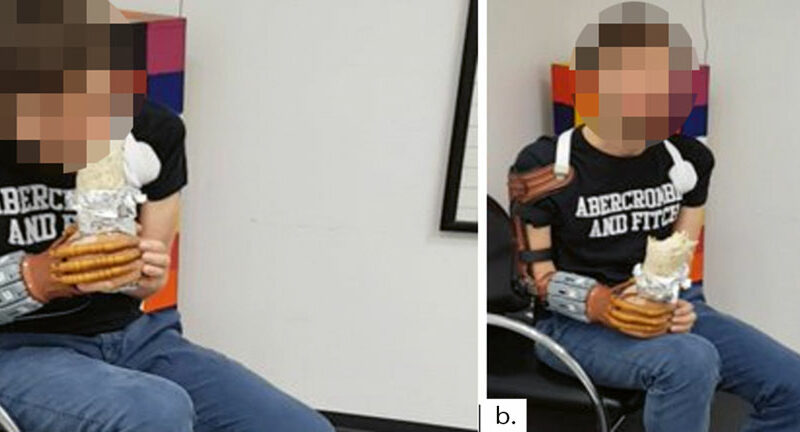
Wie sich gezeigt hat, ist der Patient in der Lage, sich sehr schnell an die Steuerung des Hilfsmittels zu gewöhnen. Auch das Wechseln der Griffmuster und deren differenziertes Benutzen ist nach kurzer Übungszeit möglich. Die nötige Zeit, die der Patient aufbringen muss, um bewusst eine bestimmte Greiffunktion durchzuführen, sinkt merklich mit zunehmendem Training. Bereits nach kurzer Zeit (weniger als eine Stunde nach dem ersten Anlegen der Orthese) ist der Patient in der Lage, verschiedene Greif- und Transportaufgaben zu bewältigen, die für ihn ohne Orthese nicht möglich sind. Teilweise wird dabei die linke Hand als Widerlager oder zur Stabilisierung des Objekts genutzt. Der Patient konnte bereits bei der Anprobe selbstständig im Sitzen eine Mahlzeit mit den Händen zu sich nehmen, die er nach eigener Aussage sonst auf dem Boden kniend von der Tischkante essen müsste. Gegenstände wie Wasserflaschen oder ein Telefon können in verschiedenen Raumhöhen aufgenommen und wieder abgelegt werden. Das Anheben des Armes wird effizient und wirtschaftlich durch das dynamische Redressionsgelenk unterstützt, sodass die Hand trotz des zusätzlichen Versorgungsgewichts („exomotion® hand one“ ohne Bedieneinheit: 685 g; Oberarmteil: 414 g) aktiv in Richtung Kopf und Mund geführt werden kann. Durch die individuelle Körperanbindung ist die Passform laut Aussage des Patienten sehr zufriedenstellend.
Limitierungen
Gleichwohl weist die Versorgung bestimmte Limitierungen auf. Durch die fehlende Pro- und Supination ist die Ausführung mancher Griffmuster (beispielsweise Tastaturgriff) in diesem Fall nicht oder nur durch Ausgleichsbewegungen mit dem Oberkörper möglich.
Eine weitere Limitierung stellt in beidseitig betroffenen Fällen – wie dem hier vorgestellten – das selbstständige Anlegen dar, das bei der ersten Armschiene noch nicht möglich ist. Im Bereich der Handauflage und der Oberarmmanschette soll zukünftig – im Rahmen der Konstruktion der Definitiv-Armschiene – durch klappbare Bestandteile und Rasterverschlüsse das selbstständige Anlegen ermöglicht werden. Des Weiteren soll eine Wandhalterung konstruiert und angefertigt werden, in welche die Orthese zum Ein- und Ausziehen eingehängt werden kann.
Fazit
Das hier beschriebene Fallbeispiel zeigt Möglichkeiten und Einschränkungen bei der Versorgung mit aktiven Handorthesen auf. Die Kombination aus individuell hergestellter Körperanbindung und vorgefertigten Passteilen erweist sich erneut als leistungsstarke Kombination. Durch die Konsequente Nutzung digitaler Fertigungsmethoden können Aspekte wie Design, Passform, Gewichtsreduktion und Funktionalität optimal berücksichtigt werden. Je nach Ausprägung der Lähmung stehen unterschiedliche Versorgungskonzepte (bspw. mit oder ohne Oberarmanbindung) zur Verfügung. Der erreichbare Funktionsumfang hängt jedoch von der individuellen Konstitution des Patienten ab. Es gilt daher im Vorfeld die grundsätzliche Eignung zur Steuerung und Bedienung des Hilfsmittels abzuklären und dem Patienten ein realistisches Bild des möglichen Versorgungsergebnisses zu vermitteln. Bei doppelseitiger Bewegungseinschränkung bestehen zum jetzigen Zeitpunkt noch Limitationen beim eigenständigen An- und Ablegen der Orthese. Dem Patienten ist es (trotz etwaiger Einschränkungen) aufgrund der aktiven Orthese jedoch möglich, Gegenstände zu greifen, unterschiedliche Griffmuster zu verwenden und eigenständig zu essen. Durch gezieltes Training soll der Umgang mit dem Hilfsmittel kontinuierlich verbessert werden. Außerdem soll durch Verbesserungen am Orthesenaufbau in den Bereichen Verschlusstechnik und Anziehhilfen ein höheres Maß an Eigenständigkeit erreicht werden.
Die Autoren:
Steffen Matyssek, M. Sc.
Leiter Forschung und Entwicklung
Häussler Technische Orthopädie GmbH
Jägerstraße 6
89073 Ulm
matyssek@haeussler-ulm.de
Dominik D. Hepp, M. Eng.
Geschäftsführer
HKK Bionics GmbH
Prittwitzstraße 100
89075 Ulm
hepp@hkk-bionics.de
Begutachteter Beitrag/reviewed paper
Matyssek S, Hepp D. Greifen trotz Handlähmung – Versorgungsbeispiel mit myoelektrischer Handorthese. Orthopädie Technik, 2021; 72 (7): 44–48





- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- ReWalk Robotics GmbH. ReWalk Personal 6.0. https://rewalk.com/de/rewalk-personal‑3/(Zugriff am 26.05.2021)
- van Dijsseldonk RB et al. A Framework for Measuring the Progress in Exoskeleton Skills in People with Complete Spinal Cord Injury. Front Neurosci, 2017; 11: 699
- Hano K. Testversorgung mit einer myoelektrischen Armorthese anhand eines Fallbeispiels. Orthopädie Technik, 2021; 72 (4): 36–39
- Soekadar SR et al. Brainmachine interfaces in neurorehabilitation of stroke. Neurobiol Dis, 2015; 83: 172–179
- Sale P et al. Hand Robotics Rehabilitation: Feasibility and Preliminary Results of a Robotic Treatment in Patients with Hemiparesis. Stroke Research and Treatment, 2012; 820931. https://doi.org/10.1155/2012/820931
- Hano K. Testversorgung mit einer myoelektrischen Armorthese anhand eines Fallbeispiels. Orthopädie Technik, 2021; 72 (4): 36–39
