Das Programm erkennt automatisch verschiedene „Landmarken“ am Fuß und passt damit ein zweidimensionales Skelettmodell an das jeweilige Bild an. Damit berechnet das Programm die Lage der propriozeptiven Punkte und kann so für die Herstellung sensomotorischer Einlagen eingesetzt werden.

Einleitung
Die Füße sind maßgeblich an der lebenslangen Mobilität des Menschen und somit an seiner physischen und psychischen Gesundheit beteiligt. Sie unterstützen den Menschen entscheidend bei der Regulierung des Gleichgewichts und bei der Ausführung vielfältiger Bewegungsabläufe wie Gehen, Laufen, Springen oder Klettern. Statisch betrachtet fungieren sie als Stütze, Ausgleichshilfe für Bodenunebenheiten und sind Überträger des Körpergewichts auf den Boden. Das gesamte Gewicht des Körpers lastet dabei auf einer vergleichsweise kleinen Grundfläche. Bei dynamischen Bewegungsabläufen wie beim Springen oder Laufen wirken zum Teil sehr hohe Beschleunigungen, sodass die Füße ein Vielfaches des Körpergewichts abfedern bzw. abfangen müssen. Auch eine Verkleinerung der Fläche zwischen Fuß und Boden, die beispielsweise beim Sprinten auftritt, führt zu großen Belastungen.
Um diesen hohen Belastungsanforderungen zu genügen und zugleich flexible Beweglichkeit zu ermöglichen, ist ein komplexes Konstrukt aus Muskeln, Sehnen, Bändern und Knochen nötig, welches im Zusammenwirken zu dieser multifunktionalen Nutzung des Fußes befähigt 1 2 3.
Sensomotorik
Vor, bei und nach jeder Bewegung greift das sogenannte sensomotorische System regelnd in dieses Konstrukt ein. Es besteht aus verschiedenen anatomischen Strukturen sowie verschiedenen Sensoren. Auf unterster Ebene gibt es die propriozeptiven Sensoren. Diese erfassen und kontrollieren den Spannungszustand von Muskeln und Sehnen. Übergeordnet sind Sensoren, die taktile Reize, Schmerz sowie thermische Reize erfassen. Diese können die Weiterleitung der propriozeptiven Sensoren hemmen. Dem übergeordnet ist das vestibuläre System, das Bewegungen in Bezug zur Schwerkraft regelt.
Die Bewegung selbst wird vom extrapyramidalmotorischen System und vom pyramidalmotorischen System eingeleitet. Das extrapyramidalmotorische System, zu dem das limbische System, der Thalamus und die Basalganglien gehören, ist hauptsächlich an der Planung und Automatisierung von Willkürbewegungen beteiligt. Das pyramidalmotorische System dagegen ist für die Planung bewusster, feinmotorischer Bewegungen zuständig. Damit eine Bewegung harmonisch ausgeführt werden kann, müssen diese neuronalen Strukturen optimal miteinander interagieren 4.
Wirkung der sensomotorischen Einlage
Die Sensoren haben also die Aufgabe, den aktuellen Ist-Zustand des Körpers zu erfassen, um die Ausführung automatisierter und willkürlicher Bewegungen regulierend zu unterstützen. Veränderte anatomische Form, Funktionsstörungen der Gelenke sowie Verletzungen oder degenerative Erkrankungen wirken sich insbesondere auf die Signale der Rezeptoren aus. Durch eine veränderte, unphysiologische Ansteuerung der Muskeln folgt schließlich durch die Faktoren Zeit und Wiederholung der Bewegung eine Dysbalance zwischen agonistischer und antagonistischer Muskulatur. Dies kann schließlich zu knöchernen Fehlstellungen und in letzter Konsequenz zu knöchernen Deformationen führen.
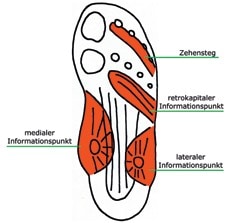
Durch gezielte Stimulation des propriozeptiven Systems mit sensomotorischen Einlagen wird die physiologische Gehbewegung nach vielen Wiederholungen der Bewegung im Gehirn verankert. Die Stimulierung der Muskeln mit Hilfe sensomotorischer Einlagen erfolgt durch sogenannte Informationspunkte (im Folgenden als „IPs“ bezeichnet), die auf die Einlage gesetzt werden. Im Gegensatz zu normalen Pelotten, die die knöchernen Strukturen nachformen und unterstützen, sollen diese Erhöhungen durch Druck auf Sehnenzüge oder ‑scheiden Muskeln dehnen. Durch das Relief der Einlage wird der Fuß so aufgerichtet, dass Ursprung und Ansatz bestimmter Muskeln näher zusammengebracht und die Muskeln somit entspannt werden. Die Reduktion der Spannung wird über die propriozeptiven Rezeptoren registriert und an das zentrale Nervensystem weitergeleitet. Durch einen Ist-Soll-Abgleich zwischen der vorliegenden Muskelspannung und dem abgespeicherten Bewegungsprogramm wird der Muskeltonus so erhöht, dass er dem abgespeicherten Programm entspricht. Um den Muskeltonus zu senken, wird der Muskel vorgespannt. Die dadurch verursachte Muskelstreckenverlängerung wird ebenfalls von den propriozeptiven Sensoren erfasst und an das zentrale Nervensystem übertragen. Da der Muskel bereits vorgespannt ist, muss er weniger stark aktiviert werden, um die Sollspannung zu erreichen. Die Vorspannung sorgt dadurch für eine Tonussenkung. Zur Ausübung der Stimulationsreize ist es wichtig, dass ausschließlich die Sehnen Druck erfahren. Die Muskeln müssen hingegen frei bleiben, damit sie genug Platz zur Kontraktion haben.
Die Stärke der Beeinflussung der Muskelaktivität wird über die Höhe der IPs reguliert. Wie Abbildung 1 zeigt, gibt es insgesamt vier verschiedene IPs, die zum Teil auf vielen passiven Einlagen zu finden sind, wo sie eine vollflächige Unterstützung bieten. Im Gegensatz zu diesen sind die Erhebungen der sensomotorischen Einlagen erheblich konvexer gestaltet, da sie die Skelettstruktur aufrichten, um Muskeln vorzuspannen oder zu entlasten. Die Muskelbäuche müssen dabei genug Freiraum haben.
Ausschlaggebend für das Anbringen der IPs auf der sensomotorischen Einlage ist die jeweilige Gangpathologie oder Fußdeformität des Patienten. Die Einlage erhält also nur die IPs, die der Patient benötigt. Grundsätzlich bleiben aber alle Muskelbäuche sowie die Plantaraponeurose frei von Druck 5 6.
Die Herstellung sensomotorischer Einlagen
Bei der Herstellung sensomotorischer Einlagen wird häufig eine Aufnahme mit einem Podoskop vorgenommen. Dabei steht der Patient auf einer Glasplatte, die von unten abgescannt wird. Das aufgenommene Bild wird vorverarbeitet und mit Hilfe eines entsprechenden Computerprogramms in einen digitalen Fußabdruck umgesetzt. Dieses digitale Farbbild lässt sich leicht archivieren und kann im Originalmaßstab ausgedruckt werden 7.
Für die Herstellung einer wirksamen sensomotorischen Einlage ist außerdem das Wissen über die exakte Lage der Skelettpunkte eine wichtige Voraussetzung. Daher wird neben der Aufnahme der Füße mit dem Podoskop auch eine Palpation der Füße durchgeführt. Durch das Ertasten erhält man neben der Beschaffenheit der Füße auch Auskunft über das Druckempfinden des Patienten. Um die dynamischen Eigenschaften des Bewegungsapparates kennenzulernen, wird der Patient während seines normalen Gangverhaltens seitlich, von vorne und von hinten beobachtet. Das Aufzeichnen des Ganges mit Kameras kann später genutzt werden, um die Funktionsweise der Einlage zu überprüfen. Neben dieser Behandlung bildet auch das Beratungsgespräch eine wichtige Grundlage bei der Herstellung sensomotorischer Einlagen.
Mit den zusammengetragenen Informationen kann schließlich die sensomotorische Einlage gefertigt werden. Dies kann beispielsweise mit Hilfe eines Einlagenrohlings erfolgen. Dazu werden bestimmte Skelettpunkte und die daraus ermittelten IPs, die zuvor auf dem Podoskopbild eingezeichnet wurden, auf den Rohling übertragen, der dann entsprechend bearbeitet wird. Die Einlagen können aber auch mit den zusammengetragenen Informationen am Computer modelliert und später aus geeignetem Material gefräst werden. Nach der Fertigstellung erhält der Patient die Einlagen, deren Wirkung durch regelmäßige Kontrollen gewährleistet wird.
Zielsetzung
Ziel dieser Forschungsarbeit ist die Entwicklung eines bildbasierten Messprogramms zur Bestimmung der individuellen Fußgeometrie. Das Programm nutzt dafür Informationen aus den Podoskopbildern, die bei der Herstellung sensomotorischer Einlagen von den Fußsohlen aufgenommen werden. Auf diesen Bildern werden automatisch bestimmte „Landmarken“ detektiert, mit deren Hilfe ein segmentiertes, zweidimensionales Skelettmodell individuell an jedes Bild angepasst wird. Daneben erkennt das Programm bestimmte Pathologien und verwendet dementsprechend ein dafür spezifisches Ausgangsskelettmodell. Nach der Anpassung werden die Konturen des generierten Skeletts auf die Ausgangsbilder übertragen, sodass die Skelettinformationen aus diesen Bildern bei der Herstellung der Einlagen genutzt werden können.
Das Programm und dessen Validierung
Das Programm basiert auf der Programmiersprache „Matlab R2010a“ der Firma MathWorks. Diese Software bietet sich besonders für numerische Berechnungen sowie zur Entwicklung verschiedenster Algorithmen an, um die IPs auf den Podoskopbildern zu detektieren. Zusätzlich besteht die Möglichkeit, ein grafisches „User-Interface“ zu erstellen, wodurch eine einfache Handhabung des komplexen Programmcodes sowie die Nutzung verschiedener Darstellungsmodi ermöglicht werden. Der Benutzer kann so durch Anwählen der dargestellten Funktionen die einzelnen Programmcodeabschnitte ausführen, die den jeweiligen Funktionen zugrunde liegen (Abb. 2).
Nach dem Laden des gewünschten Podoskopbildes laufen im Hintergrund alle Berechnungen für die Anpassung des Skelettmodells sowie die Ermittlung der Informationspunkte aus dem Modell ab. Anschließend wird das ausgewählte Bild angezeigt (Abb. 3a). Der Benutzer kann nun durch Auswählen der entsprechenden Darstellungsform das Skelett auf das Bild projizieren (Abb. 3b).
Die Anzeige der knöchernen Strukturen verbildlicht eventuell vorhandene Skelettdeformationen. Hierbei werden 10 Landmarken am Fuß als Berechnungsgrundlage für die Ausrichtung der 12 Knochensegmente genutzt, um das Fußskelett naturgetreu darzustellen. Aus dem Skelettmodell berechnet das Programm die Lage der IPs, die ebenfalls auf das Bild projiziert werden können (Abb. 3c). Diese können für die räumliche Lokalisierung der relevanten Stimulationspunkte (C1–C4) bei der Herstellung der sensomotorischen Einlagen genutzt werden. Der letzte Darstellungsmodus visualisiert eine Überlagerung aus der Skelettgrafik und den vier IPs, um deren Zusammenhang zu veranschaulichen (Abb. 3d).
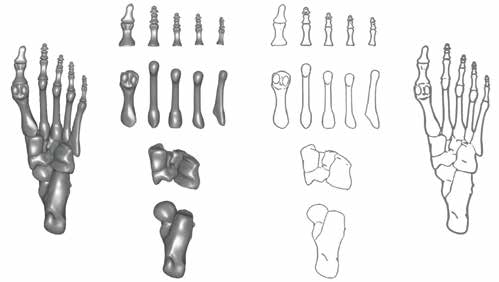
Für die Projektion einer Fußskelettkontur auf das Podoskopbild wird ein standardisiertes Skelettmodell benötigt, mit dem sich durch entsprechende Bearbeitung beliebige Fußskelettgeometrien erzeugen lassen. Die Ausgangsbilder des Fußskeletts wurden mit Hilfe eines virtuellen, dreidimensionalen Skelettfußmodells erstellt, das Giovinco et al. 8aus CT-Daten eines echten Fußes gewannen (Abb. 4).
Die Verwendung eines dreidimensionalen Modells bietet die Möglichkeit, die einzelnen Knochen so anzuordnen, dass verschiedene Deformitäten oder Fußtypen erzeugt werden können. Zuvor musste das Ausgangsmodell jedoch normiert werden. Dafür wurde mittels CAD-Software (Geomagic Studio 11) jeder Knochen des Modells separiert. Die einzelnen Knochen können somit durch Drehen und Verschieben neu justiert werden. Hierfür mussten die Ergebnisse aus der Forschungsarbeit von Thomas et al. 9 auf das Skelettmodell übertragen werden. In dieser Arbeit wurden 400 Röntgenbilder der belasteten Füße von 100 Probanden ohne Fußbeschwerden vermessen, um Winkelwerte verschiedener Fußknochen zueinander zu erheben. Das Modell wurde gemäß diesen Winkeln neu zusammengesetzt und dadurch standardisiert (Abb. 5a). Um aus diesem dreidimensionalen Modell ein zweidimensionales Abbild für die Projektion zu erstellen, wurde das Modell zunächst in 12 Segmente unterteilt (Abb. 5b). Durch Screenshots aus plantarer Sicht und Bildaufbereitung zur Extraktion der Knochenkonturen (Abb. 5c) wurden schließlich die Bildsegmente erstellt, aus denen das Programm das Fußskelett mit Hilfe der Podoskopbildinformationen rekonstruiert (Abb. 5d). Jedes der Elemente kann um seinen Ansatzpunkt rotiert und frei auf der Transversalebene des Fußes verschoben werden. Somit ergeben sich für das gesamte Modell 12 rotatorische und 24 translatorische Freiheitsgrade. Neben der Ausrichtung der Segmente kann auch deren Größe verändert werden, was eine universelle Anpassung des Skeletts an nahezu jede plan darstellbare Fußform ermöglicht.
Die Genauigkeit des vom Programm generierten Skeletts wurde indirekt über die daraus ermittelten Informationspunkte validiert. Dazu wurden insgesamt jeweils 66 Podoskopbilder von drei geschulten Fachkräften analysiert und ausgewertet. Der mediale und der laterale IP werden jeweils als Kreis auf das Podoskopbild gezeichnet, deren Mittelpunkte zum Vergleich mit dem Programm verwendet werden. Der retrokapitale IP sowie der Zehensteg werden von den Fachkräften auf den Podoskopbildern als Linie eingezeichnet. Zur Ermittlung einer aussagekräftigen Referenzlinie werden daher je drei Punkte auf der Linie bestimmt, welche diese charakteristisch beschreiben. Aus den eingezeichneten Markierungen für die IPs wurden für jedes Bild deren mittlere Position und die Streuung der eingezeichneten Punkte um diese Position bestimmt. Daraus können für den medialen und den lateralen IP sowie für die drei charakteristischen Punkte des retrokapitalen IPs ellipsenförmige Referenzareale berechnet werden.
Der Zehensteg wurde wie der retrokapitale IP in drei Punkte überführt. Diese liegen im unteren Drittel der Zehenbeeren des zweiten, dritten und vierten Strahls. Da die Position der Punkte in medial-lateraler Richtung durch die Mitte der Zehenbeeren festgelegt ist, wurde nur die Streuung in anterior-posteriorer Richtung zum Vergleich herangezogen.
Wie Tabelle 1 zeigt, liegen informationspunktspezifisch zwischen 32,8 und 59,1 % der vom Programm berechneten IPs innerhalb der Referenzareale der fachmännisch ermittelten Informationspunkte. Betrachtet man die Entfernung der generierten Punkte zur jeweiligen Grenze des zugehörigen Bereichs, so zeigt sich, dass sich viele der errechneten Punkte am Rand der Areale befinden. Da aus anatomischer Sicht eine Vergrößerung der Areale in bestimmte Richtungen möglich ist, können auch einige der am Rand der Areale befindlichen Punkte für die Herstellung funktionierender sensomotorischer Einlagen verwendet werden.
Auch wenn das Programm viele Podoskopaufnahmen genauso auswertet wie die geschulten Fachkräfte, arbeitet es jedoch noch nicht zuverlässig genug, um im Alltag für die Vorlagengenerierung für Einlagen verwendet zu werden. Dazu müssen die Algorithmen zur Erkennung der Landmarken weiter verbessert werden. Ein möglicher Ansatz dafür ist die Analyse der Farben auf den Podoskopaufnahmen. Dies ermöglicht beispielsweise die automatische Erkennung der Druckbereiche unter der Fußsohle.
Ausblick
Wenn das Programm auf zweidimensionaler Ebene hinreichend genau funktioniert, ist eine Erweiterung des Programms zur dreidimensionalen Fußgeometrieanalyse vorgesehen (Abb. 6). Dadurch können auch Deformationen wie ein Hohl- oder Spitzfuß dargestellt werden, die aus plantarer Sicht allein aus dem Skelett kaum zu erkennen sind. Eine frei wählbare Sicht auf das Skelett ermöglicht auch eine genaue Analyse der Fußgewölbe. Dadurch könnte man die Ausprägung der einzelnen Erhöhungen auf der Einlage auch nachträglich exakt bestimmen. Momentan werden diese Informationen durch Palpation der Fußsohle gewonnen. Für die korrekte Anpassung der Fußgewölbe müsste diese erfühlte Form in das Programm überführt werden. Für die Realisierung der dreidimensionalen Rekonstruktion des Fußskeletts ist es jedoch notwendig, noch mehr Informationen über die Knochenstellungen aus den Podoskopaufnahmen zu ermitteln. Die Präzision des adaptierten Modells könnte beispielsweise durch die Integration weiterer Messsysteme wie Druckmessplatten oder 3‑D-Scanner verbessert werden. Als Nächstes muss das Programm jedoch eingehend getestet werden, um eventuelle Schwachstellen der zugrunde liegenden Algorithmen oder der Benutzerfreundlichkeit erkennen und beheben zu können. Dann zeigt sich auch, inwieweit sich der Arbeitsaufwand und die Qualität der Einlagenversorgung durch die Verwendung des Programms verbessern lassen.
Der Autor:
Dipl.-Ing. Martin Haacke, M. Sc.
Biomechanik – Motorik – Bewegungsanalyse
Zweibrücker Straße 91
66424 Homburg
martin.haacke@gmx.de
Begutachteter Beitrag/reviewed paper
Haacke M. Entwicklung eines bildbasierten Messsystems zur Bestimmung der Fußgeometrie — Ein System für die Herstellung sensomotorischer Einlagen. Orthopädie Technik, 2016; 67 (8): 34–37
| Areale der Informationspunkte | Anzahl der Treffer der Referenzareale | |
|---|---|---|
| absolut | relativ in % | |
| medialer IP | 38 | 57,6 |
| lateraler IP | 39 | 59,1 |
| retrokapitaler IP (medial) | 21 | 32,8 |
| retrokapitaler IP (zentral) | 26 | 39,4 |
| retrokapitaler IP (lateral) | 33 | 50,0 |
| Zehensteg 2. Strahl | 38 | 57,6 |
| Zehensteg 3. Strahl | 35 | 53,0 |
| Zehensteg 4. Strahl | 35 | 53,0 |




- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Hohmann D, Uhlig R. Orthopädische Technik. 9. Auflage. Stuttgart: Georg Thieme Verlag, 2005: 503
- Streeck U, Focke J, Kimpel LD, Noack D‑W. Manuelle Therapie und komplexe Rehabilitation. Band 2: Untere Körperregion. Heidelberg: Springer Medizin Verlag, 2007: 281–282
- Baumgartner R, Stinus H. Die orthopädische Versorgung des Fußes. 3. Auflage. Stuttgart: Georg Thieme Verlag, 2001: 2–3
- Haus K‑M et al. Neurophysiologische Behandlung bei Erwachsenen: Grundlagen der Neurologie, Behandlungskonzepte, Alltagsorientierte Therapieansätze. 2. Auflage. Berlin: Springer Medizin Verlag, 2010: 54–84
- Brinkmann F. Ganganalytische Untersuchung zur therapeutischen Effizienz der sensomotorischen Einlagen nach Jahrling bei zentralnervösen Erkrankungen. Diplomarbeit, Fachhochschule Gießen-Friedberg, 2005: 31–32
- Falkensteiner M. Die Sensomotorische Schuheinlage bei Hemiparesepatienten. Diplomarbeit, Akademie für den physiotherapeutischen Dienst am Landeskrankenhaus Steyr, 2005: 40–43
- Baumgartner R, Greitemann B. Grundkurs Technische Orthopädie. 2. Auflage. Stuttgart: Georg Thieme Verlag, 2007: 19
- Giovinco NA. Anatomic Human Foot & Lower Extremity Version 2.0. http://www.thingiverse.com/thing:22628 (Zugriff am 11.07.2016)
- Thomas JL, Kunkel MW, Lopez R, Sparks D. Radiographic Values of the Adult Foot in a Standardized Population. J Foot Ankle Surg, 2006; 45 (1): 3–12
