Die fünf getesteten konventionellen Prothesenfüße (Variflex LP, Variflex und ProFlex der Össur hf, Reykjavik/Island; Echelon von Blatchford, Basingstoke/Großbritannien; Promenade von Proteor, Irvine/USA) zeigen in ihrer ROS typische Kurvenformen, die denen der Literatur entsprechen. Der 3D-gedruckte Prothesenfußprototyp (NexStep 2.0, Mecuris, München) zeigt in beiden Versionen durchweg flachere und längere ROS im Vergleich zu den anderen Prothesenfüßen, was einem steiferen Verhalten entspricht. Passt man mittels mathematischer Verfahren einen Kreis in die ROS, entsprechen große Radien des Kreises ebenfalls einer höheren Steifigkeit. Der 3D-gedruckte Prothesenfußprototyp zeigt in beiden Versionen die größten Radien von allen getesteten Füßen.

Zusammenfassend ist festzustellen, dass die 3D-Drucktechnik prinzipiell in der Lage ist, die Anforderungen an das Abrollverhalten eines Prothesenfußes zu erfüllen. Weitere Design-Iterationen unter Rücksichtnahme der hier gesammelten Daten wären denkbar, um das Abrollverhalten weiter zu optimieren. Darüber hinaus sind die vielen Vorteile der 3D-Drucktechnik zu beachten, die in dieser Studie nicht untersucht wurden. So lassen sich zum Beispiel leicht Teile produzieren die nicht oder nur begrenzt erhältlich sind, wie beispielsweise Prothesenfüße für Kinder. Bei dem hier untersuchten 3D-gedruckten Prothesenfuß handelt es sich um die Überprüfung eines Konzepts, er ist nicht am Markt erhältlich.
Einleitung
Ein physiologischer Gang hängt von einer Reihe biomechanischer Merkmale ab, um ein ökonomisches und stabiles Gangbild zu ermöglichen. Körperliche Einschränkungen, wie zum Beispiel eine Amputation der unteren Extremität, können den Gang und die Gangökonomie nachteilig beeinflussen und zu einem erhöhten Energieverbrauch führen. Prothesenfüße dienen dazu, das natürliche Erscheinungsbild, aber primär die physiologischen Hebelverhältnisse wieder so herzustellen, dass die Gangökonomie für die Person mit einer Amputation möglichst effizient gestaltet werden kann.
Prothesenfüße sind typischerweise passive Konstruktionen ohne einen zusätzlichen Antrieb. Sie können aus unterschiedlichen Materialien hergestellt werden. Angefangen bei sehr einfachen Konstruktionen, wie beispielsweise dem Jaipur-Fuß (Bhagwan Mahaveer Viklang Sahayata Samiti, Jaipur/Indien), einem weit verbreiteten Prothesenfuß, der hauptsächlich in „Low Income Countries“ eingesetzt wird1 2.
Trotz der sehr einfachen Herstellungsverfahren (Vulkanisieren) und Materialien (geschäumte Kunststoffe, Kautschuk, Nylonfasern und Holz) des Jaipur-Fußes sind die grundlegenden biomechanischen Funktionen erfüllt, wie beispielsweise die Wiederherstellung der Hebelverhältnisse. Unter der Verwendung von Polyurethan-Schäumen und in Kombination mit einem Holzkern und einer weichen Ferse wird der SACH-Fuß hergestellt3 4 5 6.
Diese Konstruktion gehörte bis vor einigen Jahrzehnten noch zum Standard, sie ist heute aber weitestgehend durch moderne Konstruktionen auf der Basis von Faserverbundwerkstoffen (mehrheitlich mit Karbonfasern) abgelöst worden. Der Name SACH ist eine Abkürzung und beschreibt die grundlegenden mechanischen Charakteristika des Prothesenfußes: S = Solid, A = Ankle, C = Cushion, H = Heel. Dementsprechend handelt es sich um einen Prothesenfuß ohne ein bewegliches prothetisches Sprunggelenk und mit einer weichen Ferse, um eine Dämpfung beim Fersenauftritt zu ermöglichen. Wie bereits erwähnt, ist der heutige etablierte Standard der energiespeichernde Karbonfaserfuß, der im Englischen auch häufig als „Energy Storing and Returning“-Fuß, kurz ESAR beschrieben wird7 8 9 10.
In jüngster Zeit findet die Additive Fertigung beziehungsweise der 3D-Druck in der Pro- und Orthetik vermehrt Anwendung11. Der 3D-Druck ist eine vielversprechende Technik und ermöglicht die Fertigung von komplexen Strukturen in Kombination mit unterschiedlichen Materialien beziehungsweise Materialeigenschaften. Insbesondere durch die Natur inspirierte fließende Formen oder auch Formen mit Unterschneidungen sowie perforierte und hohle Strukturen lassen sich mittels dieses Verfahrens mit deutlich geringerem Aufwand herstellen. Auch funktionelle Strukturen wie Getriebe lassen sich direkt drucken. Der 3D-Druck wird mittlerweile auch bei der Herstellung von Prothesenfüßen eingesetzt. Neben den Vorteilen, die dieses Verfahren bietet, bleibt jedoch unklar, ob ein 3D-gedruckter Prothesenfuß vergleichbare biomechanische Charakteristika aufweist wie etablierte ESAR-Füße.
In der hier vorgestellten Studie soll nicht auf die Vor- und Nachteile unterschiedlicher 3D-Drucktechniken eingegangen werden, sondern auf die mechanischen Charakteristika eines Prothesenfußes, der mittels eines 3D-Druckverfahrens hergestellt wurde. Der 3D-gedruckte Prototyp des Prothesenfuß NexStep 2.0 (Mecuris, München) wurde in einer steiferen und in einer weicheren Version getestet. Es sollen insbesondere die Abrolleigenschaften des 3D-gedruckten Prothesenfußes mit etablierten, am Markt erhältlichen Prothesenfußdesigns verglichen werden. Es wurden fünf teils sehr unterschiedliche Prothesenfüße mit den 3D-gedruckten Modellen verglichen, um die Vielfalt der am Markt erhältlichen Füße ansatzweise abzubilden. Als Methode für den Vergleich der Abrolleigenschaften wurden die sogenannte Roll Over Shape (ROS) und dazu verwandte Methoden genutzt. Aktuell ist dieser Fuß nicht auf dem Markt erhältlich, da sich die Firma Mecuris (München) rein auf die Bereitstellung von Software zur Erstellung orthopädischer Hilfsmittel konzentriert und Produkte nicht mehr selbst herstellt. Beim NexStep‑2.0‑Fuß handelt es sich um einen Prototyp, der als Konzeptnachweis zu verstehen ist und nicht als eine mögliche Standardversorgung.
Material und Methoden
Versuchsaufbau
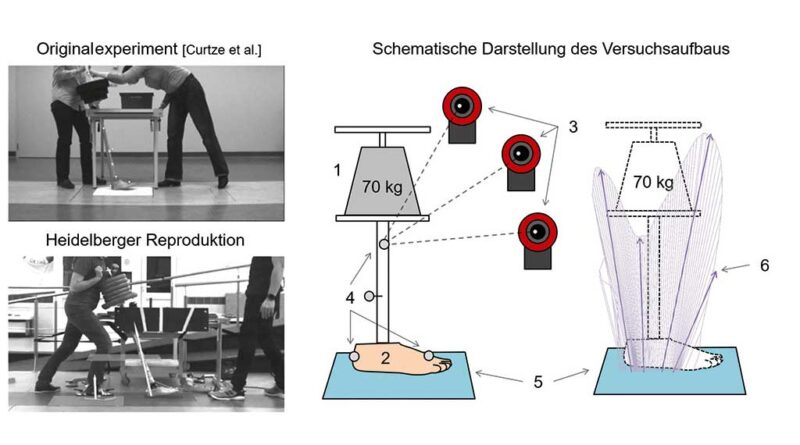
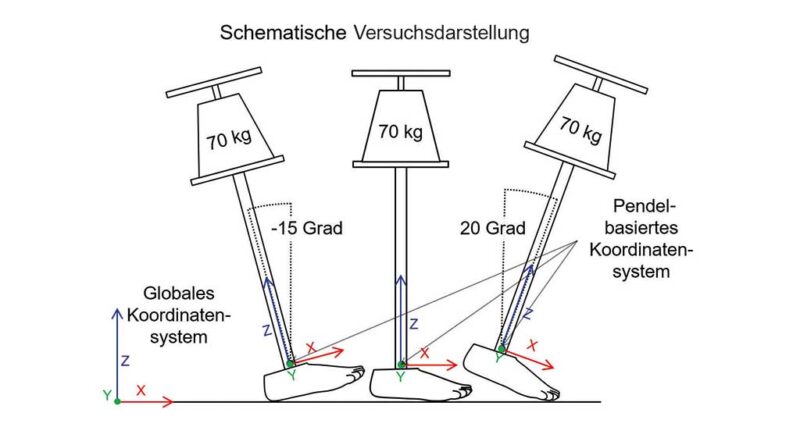
In der Studie „gedruckter Prothesenfuß“, die an der Klinik für Orthopädie des Universitätsklinikums Heidelberg in Kooperation mit der Firma Mecuris (München) durchgeführt wurde, wurden die untersuchten Prothesenfüße mit einem Prüfstand in Anlehnung an Curtze et al. getestet (Abb. 1)12 13. Bei diesem Aufbau wurde eine Konstruktion in Form eines umgekehrten Pendels mit einer proximalen Masse (70 kg, ca. 1 m Höhe) verwendet, an dem die Prothesenfüße distal befestigt waren. Das Pendel wurde während des Versuchs von zwei Personen bewegt, um eine physiologische Belastung des Prothesenfußes in der einbeinigen Unterstützungsphase zu simulieren (Abb. 2). Dabei wurde das Pendel gegenüber der vertikalen Raumachse kontinuierlich von einer 15-Grad-Rückneigung bis zu einer 20-Grad-Vorneigung bewegt (Abb. 2).
Vorteil dieses Verfahrens ist die gute Wiederholbarkeit und der Ausschluss von personenspezifischen Einflussfaktoren (siehe auch Abschnitt Reproduzierbarkeit der ROS). Die Bodenreaktionskraft und der Kraftangriffspunkt des Pendels (engl. Centre of Pressure, kurz CoP) wurden mit einer Kraftmessplatte (Advanced Mechanical Technology, kurz AMTI, Watertown/MA, USA) und einer Aufnahmefrequenz von 1080 Hz aufgenommen (Abb. 1). Sowohl die Bewegung beziehungsweise Neigung als auch die räumliche Position des Pendels in Relation zur Kraftmessplatte wurden mittels eines optoelektronischen 3D-Bewegungsanalysesystems (Vicon, Oxford/Großbritannien) erfasst. Hierzu wurden reflektierende Marker auf dem Pendel angebracht (Abb. 1). Das Bewegungsanalysesystem besteht aus 12 Kameras (Vicon T40s), und die Trajektorien der Marker (3D-Bewegungskurven über die Zeit) wurden mit einer Aufnahmefrequenz von 120 Hz erfasst. Zur Berechnung der Pendelkinematik wurde ein biomechanisches Model auf der Grundlage der Vorarbeiten von Simon et al. entwickelt14.
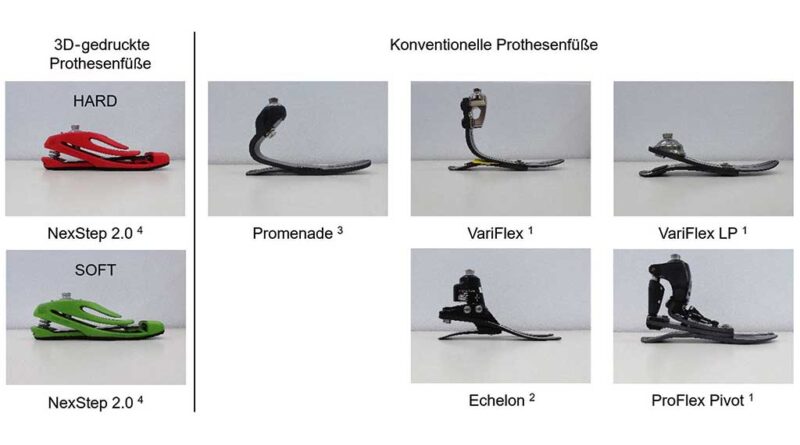
Zwei Prothesenfüße mit unterschiedlichen Steifigkeitseigenschaften, die mittels additiver Verfahren hergestellt wurden (NexStep 2.0, Mecuris, München), wurden untersucht. Um die Ergebnisse der 3D-gedruckten Prothesenfüße mit etablierten Designs vergleichen zu können, wurden Daten von fünf konventionellen Prothesenfüßen aufgenommen (Variflex LP, Variflex und ProFlex der Össur hf, Reykjavik/Island; Echelon von Blatchford, Basingstoke/Großbritannien; Promenade von Proteor, Irvine/USA [Abb. 3]). Von allen sieben Füßen wurden Daten aus mindestens zehn Messwiederholungen aufgenommen. Das Pendel wurde in einem Bereich von ‑15° (Rückneigung) bis +20° mit einer Winkelgeschwindigkeit von ca. 10–13°/s bewegt. Ein Eindruck des Versuchsaufbaus kann durch Video 1 gewonnen werden:
Die Daten der Messwiederholungen wurden gemittelt. Die weitere Auswertung fand auf Grundlage des Mittelwertes der Messwiederholungen statt. Alle sieben Füße hatten die Größe 27 und wurden in ihrer Kategorie so gewählt, dass sie für eine Person von 70 kg den Herstellerempfehlungen entsprachen. Die Auswahl der Füße wurde auf der Grundlage von zwei Aspekten vorgenommen:
- Die Designs sollten möglichst unterschiedlich sein und beispielsweise niedrig- wie hochbauende Prothesenfüße und auch spezielle Konstruktionen wie hydraulische Gelenke und sehr flexible Konstruktionen einschließen.
- Die Vergleichsfüße wurden zweckmäßig ausgewählt. So wurde Modellen der Vorzug gegeben, die direkt verfügbar waren. Dabei ist zu beachten, dass die untersuchten Modelle, die eingeschlossen wurden, in dieser Form teilweise nicht mehr am Markt erhältlich sind.
Die zwei 3D-gedruckten Prothesenfüße wiesen zwei verschiedene Steifigkeitscharakteristika (Soft & Hard) auf. Die Eigenschaften wurden nicht durch das verwendete Material modifiziert, sondern durch eine härtere und weichere Fersenfeder und eine einfache Karbonblattfeder (Soft) beziehungsweise gedoppelte Karbonblattfeder (Hard) erreicht. Die Blattfedern waren in die 3D-gedruckte Struktur des Prothesenfußes eingeschoben und verliefen vom Zehenbereich bis zum Fersenbereich (Abb. 3).
Roll Over Shape (ROS)
Die ROS ist eine Darstellungsform des Angriffspunktes der Bodenreaktionskraft (Center of Pressure, CoP) und dessen Verlaufs. Die ROS charakterisiert das Abrollverhalten eines Fußes im physiologischen Fall wie auch bei Prothesenfüßen. Sie repräsentiert die effektive „Abrollform“ des Prothesenfußes unter Last. Als Daumenregel kann man sagen: Je runder die Form, desto leichter rollt man darüber ab, und je flacher die Form, desto schwerer fällt einem das Abrollen. Dies kann mit dem Effekt einer Mittelfußrolle bei einer orthopädischen Schuhzurichtung verglichen werden. Hierbei ist der Rollenscheitel typischerweise deutlich nach hinten verlagert und liegt somit hinter der vorderen Fußquerachse. Die Fußabrollung wird dadurch erleichtert, gleichzeitig die Standphase verkürzt wie auch die gesamte Standfläche15. Die ROS für eine solche Schuhzurichtung wäre deutlich „runder“ im Vergleich zum gleichen Schuh ohne Mittelfußrolle.
Die ROS wird durch die Bestimmung des CoP in Bezug zu einem pendelbasierten Koordinatensystem berechnet16 17 18 (Abb. 2). In der Anwendung bei einer Person mit einer Amputation der unteren Extremität ist das Koordinatensystem entsprechend prothesenbasiert. Bei Betrachtung des CoP in diesem Koordinatensystem ergibt sich eine Kurve, die die effektive Abrollkurve und die funktionellen Hebel des getesteten Prothesenfußes widerspiegelt. Mit Hilfe der ROS können Aussagen zur Prothesenfußcharakteristik getroffen werden. Eine längere ROS mit einem größeren Radius deutet auf einen steiferen Prothesenfuß hin19 20.
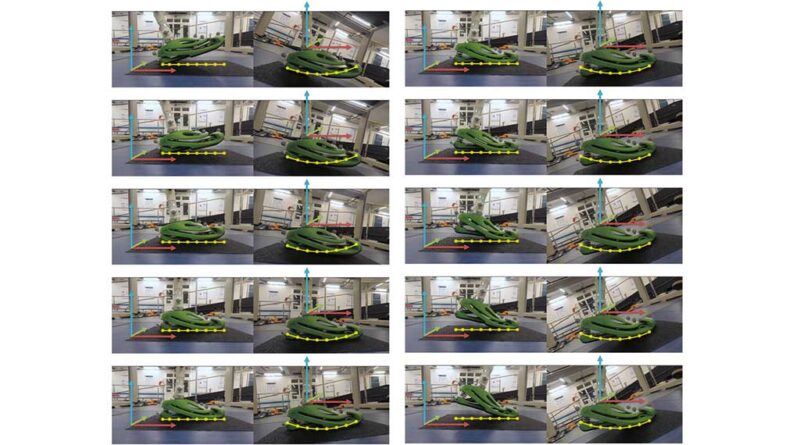
Zur Veranschaulichung wird in Video 2 (s. unten) der Verlauf des CoP in einem Raum und in einem schaft- bzw. pendelbasierten Koordinatensystem gezeigt. Abbildung 4 veranschaulicht zudem eine Reihe von Einzelbildern aus dem Video:
Im Gegensatz zu anderen Ergebnissen der instrumentellen 3D-Ganganalyse wie der Gelenk-Kinematik (Winkelverläufe) und der Gelenk-Kinetik (Drehmoment und Leistung) ist bei der ROS die biomechanische Definition des Prothesenfußes ein weniger großer Einflussfaktor. So beeinflusst beispielsweise die Position des Gelenkzentrums die Ergebnisse der Kinematik und der Kinetik. Ein Prothesenfuß hat aber in der Regel kein gleichbleibendes Gelenkzentrum. Dies ist ein grundsätzliches Problem in der Bewegungsanalytik von Menschen mit einer Beinamputation, denn die Platzierung des „Sprunggelenkmarkers“, der das Gelenkzentrum mitbestimmt, ist bei diesen Personen deutlich erschwert. In der Regel bestehen Prothesenfüße aus verformbaren Strukturen und die daraus resultierende Bewegung ist im eigentlichen Sinne keine Drehbewegung um ein Gelenkzentrum. Bei einfachen biomechanischen Modellen wird der physiologische Fuß als starres Segment mit einem Kugelgelenk auf Höhe des oberen Sprunggelenks definiert. Die ROS hat den großen Vorteil, dass deren Berechnung nicht von der Definition des Fußsegmentes abhängig ist.
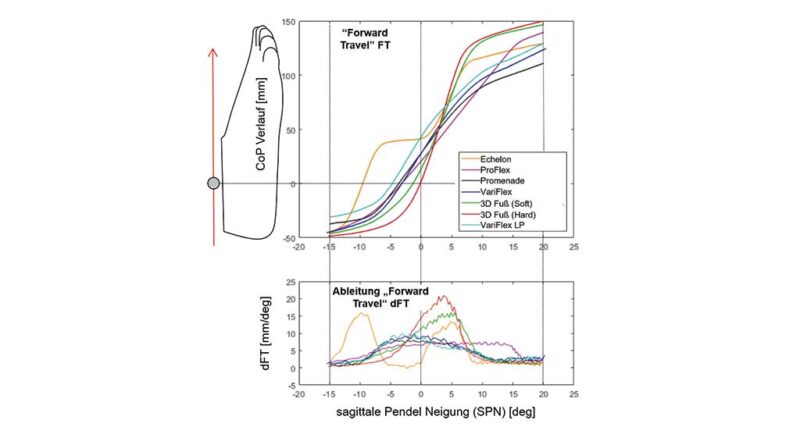
Der Anterior-posterior-CoP-Verlauf wurde ebenfalls in einem pendelbasierten Koordinatensystem berechnet. Trägt man diesen Wert gegen die sagittale Pendelneigung (SPN) ab, ergibt sich der sogenannte „Forward-Travel“ (FT)21 22, der der Progression des CoP in Relation zur Pendelneigung SPN entspricht. Weiter kann man den FT nach der Position des Pendelwinkels ableiten und in Relation zum Pendelwinkel darstellen. Dies ergibt eine anschauliche Darstellung dazu, wann die Progression (in mm/Grad) des CoP stagniert, beziehungsweise wann der CoP sich schneller Richtung Fußspitze bewegt.
Reproduzierbarkeit der ROS
Das Pendel wird von zwei Personen geführt und es sind Veränderungen in der Winkelgeschwindigkeit des Pendels zu erwarten. Um die Reproduzierbarkeit der Methode zu überprüfen, wurden Messwiederholungen mit einem der untersuchten Prothesenfüße (VariFlex von Össur) durchgeführt. So ließ sich ermitteln, wie sehr die Form der ROS von der Bewegungsgeschwindigkeit und der Stetigkeit der Bewegung abhängig ist. Hierzu wurde das Pendel in unterschiedlichen Konditionen an zwei aufeinanderfolgenden Messtagen jeweils 50-mal in jeder Kondition bewegt. Die Ergebnisse wurden mittels des Intraclass Correlation Coefficient (ICC) verglichen, wobei Werte nahe 1 einer sehr guten Reproduzierbarkeit entsprechen und Werte nahe 0 einer sehr schlechten23.
In den Konditionen wurde das Pendel folgendermaßen bewegt:
- regulär (Vorwärtsbewegung mit möglichst gleichbleibender Winkelgeschwindigkeit entsprechend einer regulären Messung)
- sehr langsam (möglichst geringe Winkelgeschwindigkeit)
- mit ungleichmäßiger Geschwindigkeit (langsame zu schneller Winkelgeschwindigkeit)
- mit ungleichmäßiger Geschwindigkeit (schnelle zu langsamer Winkelgeschwindigkeit)
- keine kontinuierliche Vorwärtsbewegung (Pendel hin und her bewegt)
Dadurch ergeben sich vier modifizierte Konditionen neben der regulär durchgeführten Messung. Die Reliabilität kann als exzellent eingestuft werden. Die Parameter erreichten in der Regel einen ICC über 0,9 (x- und z‑Komponenten der ROS) und dies unabhängig von der Kondition. Einzige Ausnahme ist der ermittelte Radius, der mit einem ICC von 0,889 im schlechtesten Fall unter 0,9 rutscht, was aber immer noch einer sehr guten Reproduzierbarkeit entspricht. Der qualitative Vergleich der ROS zeigte keine Änderungen, die zu einer anderen Interpretation der Kurvenform geführt hätte. Ein vermehrtes Rauschen der Daten war einzig bei der nicht-kontinuierlichen Bewegung zu verzeichnen. Insgesamt zeigen diese Daten, dass die Methode der ROS sehr robust gegen Störungen ist, was die Pendelbewegung betrifft. Eine präzise Messung der Bewegung und Kraft ist hierfür natürlich die Voraussetzung.
Ergebnisse
Roll Over Shape (ROS)
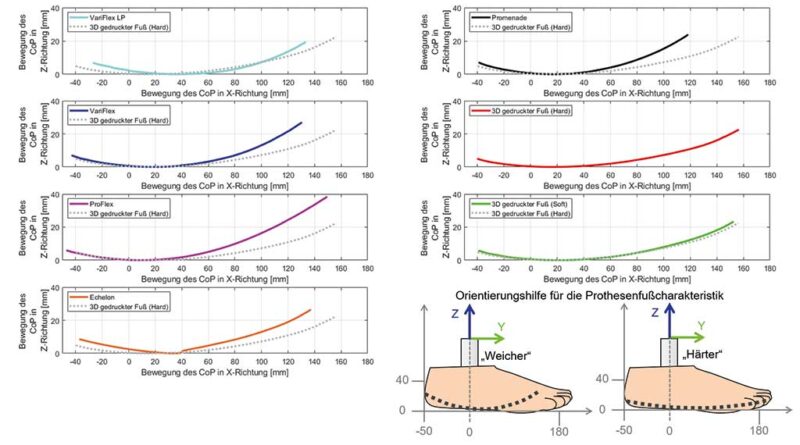
Die ROS der sieben unterschiedlichen Prothesenfüße sind in Abbildung 5 dargestellt. Hierbei wird der tiefste Punkt der ROS ermittelt und auf 0 der Ordinate (siehe Abb. 5, Y‑Achse) gelegt. Je höher der Wert auf der Y‑Achse, desto mehr verformt sich der Prothesenfuß unter Last und desto näher liegt der CoP zum pendelbasierten Koordinatensystem. Die Abszisse (Abb. 5, X‑Achse) gibt die Anterior-posterior-Position des CoP an. Die 0 auf der Abszisse markiert die Position des Pyramidenadapters des Prothesenfußes beziehungsweise des Pendels. Entsprechend stehen negative Werte für eine CoP-Position hinter dem Adapter und positive für eine CoP-Position vor dem Adapter. Der qualitative Vergleich der unterschiedlichen ROS-Formen zeigt Unterschiede in der Charakteristik der verschiedenen Prothesenfüße. Sowohl ein geringerer ROS-Radius als auch eine längere ROS repräsentieren einen steiferen Prothesenfuß, der sich unter Last weniger verformt (siehe Abb. 5). Ein kleinerer ROS-Radius und eine kürzere ROS-Länge stehen für einen weicheren Fuß. Als Vergleich wurden für Abbildung 5 in allen Grafiken die ROS der „harten“ Version des NexStep 2.0 als gepunktete graue Linie dargestellt. Dies zeigt, dass die ROS der „harten“ Version des NexStep 2.0 teilweise flacher und immer länger als die der Vergleichsfüße ist.
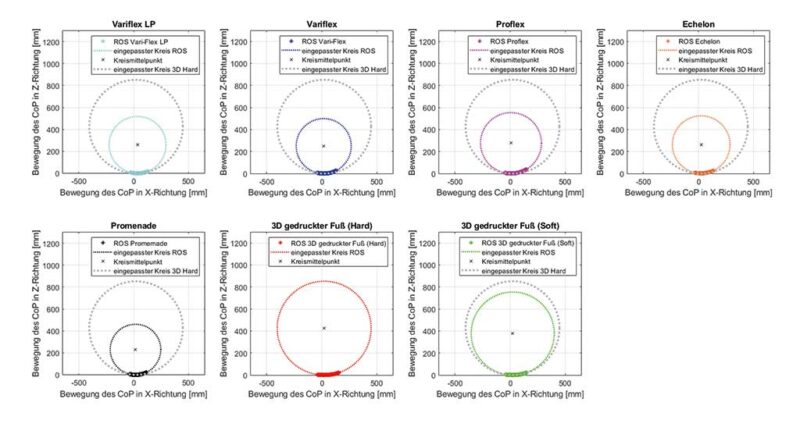
Roll-Over-Shape-Radien
Die ROS-Radien lassen sich durch das mathematische Einpassen eines Kreises in die ROS abschätzen24. Der Durchmesser des Kreises kann damit als direktes Maß für die Steifigkeit des Prothesenfußes herangezogen werden. In Abbildung 6 sind die Radien aller untersuchten Füße dargestellt. Beide 3D-gedruckten Prothesenfüße wiesen Radien über 500 mm auf. Alle konventionellen Prothesenfüße wiesen Radien unter 300 mm auf, der in Abbildung 6 dargestellte Radius des Promenade (Proteor, Irvine/USA) war der kleinste von allen ermittelten Radien.
Forward Travel (FT)
Der Forward Travel (FT/CoP-Progression in Relation zur sagittalen Pendelneigung [SPN]) und seine erste numerische Ableitung (dFT) wurde mit allen Prothesenfüßen verglichen (Abb. 7). Sowohl die härtere als auch die weichere Version des NexStep 2.0 zeigten höhere Maxima in der ersten Ableitung des FT (weich 16,1 mm/Grad bei 4,9° [SPN]; hart 21,0 mm/Grad bei 3,7° [SPN]) und einen eher stufenförmigen Grafen beim FT (Abb. 7). Alle anderen Füße hatten ein durchschnittliches Maximum von 10,2 mm/Grad beim dFT.
Diskussion
Individualisierte, 3D-gedruckte Prothesenfüße eröffnen die Möglichkeit von maßgeschneiderten Abrolleigenschaften. Sowohl die weiche als auch die harte Version des NexStep 2.0 erfüllen die generellen Anforderungen an einen Prothesenfuß, indem sie den Vor- und Rückfußhebel adäquat wiederherstellen. Dies wird durch einen kontinuierlichen CoP-Verlauf belegt. Allerdings wurde eine generell höhere Steifigkeit im Vergleich zu etablierten Prothesenfuß-Designs festgestellt. Die ROS der 3D-gedruckten Prothesenfüße war teilweise flacher und durchweg länger als die von konventionellen Prothesenfüßen. Die ROS-Radien sowohl der weicheren als auch der härteren Version des NexSteps 2.0 waren deutlich höher als die der konventionellen Designs. Zusätzlich deuteten die steileren Steigungen im FT als auch höheren Maxima im dFT ebenfalls auf eine steifere Charakteristik der 3D-gedruckten Füße hin. Dies könnte bei Personen mit einer Amputation der unteren Extremität zu einem erhöhten Widerstand beim „Überlaufen“ eines solchen Prothesenfußes führen25. Eine andere Materialauswahl oder ‑kombination, strukturelle Anpassungen oder eine angepasste Geometrie könnten dazu beitragen, die Abrolleigenschaften der hier getesteten 3D-gedruckten Prothesenfüße weiter zu verbessern.
Der Radius der ROS hat laut Adamczyk und Kollegen eine vergleichsweise geringere Auswirkung auf die Gangökonomie. Sehr kleine Radien scheinen tendenziell unökonomischer zu werden, je kleiner der Radius wird. Der andere Extremfall, ein sehr großer Radius, kann sich auf die Gangökonomie recht ungünstig auswirken26. Bei einer starren Form bewegt sich der CoP nicht kontinuierlich und man „rollt“ nicht über den Fuß ab. Der CoP bewegt sich in diesem Fall sehr schnell, abrupt und nicht kontinuierlich27. Die verbleibende Muskulatur der betroffenen und erhaltenen Seite muss in diesem Fall kompensatorische Kräfte aufbringen28, was die Gangökonomie reduziert. Die beiden NexStep-Modelle wiesen flachere ROS und größere Radien in unseren Messungen auf.
Jedoch ist zu bedenken, dass die hier vorgestellten Ergebnisse nicht verallgemeinert werden können. Die Aussage „3D-gedruckte Füße sind generell steifer“ trifft nicht zu, da das Material nicht ausschließlich die Charakteristik bestimmt. Die Ergebnisse aller hier getesteten Füße zeigen deutlich, wie sehr die Prothesenfußkonstruktion die Ergebnisse beeinflussen kann. So weichen zum Beispiel die Ergebnisse des Echelons deutlich von den Ergebnissen der anderen Füße ab. Dies ist naheliegend, da dies der einzige Prothesenfuß mit einem hydraulischen Gelenk ist und daher deutliche Unterschiede zu erwarten waren29 30. Entsprechend kann alleine durch Anpassungen des Designs der 3D-gedruckten Prothesenfüße ein Fuß hergestellt werden, der leichter zu „überlaufen“ ist.
Die Vorteile des 3D-Drucks liegen stärker in der hochindividuellen Versorgung von Patienten als in der industriellen Serienproduktion von Passteilen. Insbesondere bei Patienten, bei denen eine Standardversorgung nicht ohne hohen Aufwand möglich ist, kann die Fertigungsmethode des 3D-Drucks neue Versorgungsformen ermöglichen. So ist beispielsweise die Auswahl an industriell gefertigten Kinderprothesenfüßen sehr limitiert und der 3D-Druck von Prothesenfüßen könnte hier eine Lücke schließen.
Weitere Messungen von angepassten Modellen der hier getesteten 3D-gedruckten Prothesenfüße, bei denen die vorgeschlagenen Verbesserungen berücksichtigt werden, wären vielversprechend. Auch die Betrachtung der ROS beim Gehen von Menschen mit einer Beinamputation in Kombination mit deren Feedback könnten zu weiteren Designverbesserungen führen. Es handelte sich bei diesen Prothesenfüßen jedoch um Prototypen und eine Vermarktung dieses Produkts ist von Seiten des Herstellers nicht geplant.
Danksagung
Wir danken der Firma Mecuris für die finanzielle Unterstützung dieser Studie und der für die Studie zur Verfügung gestellten Prototypen.
Für die Autoren:
Dipl. Ing. (FH) Daniel Heitzmann
Universitätsklinikum Heidelberg
Schlierbacher Landstraße 200a
69118 Heidelberg
daniel.heitzmann@med.uni-heidelberg.de
Begutachteter Beitrag/reviewed paper
Heitzmann DWW, Högerle VS, Trinler U, Wolf SI, Alimusaj M. Das Abrollverhalten eines 3D-gedruckten Prothesenfußes: Ermittlung der Roll Over Shape im Vergleich zu konventionellen Designs. Orthopädie Technik, 2023; 74 (12): 36–45
- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Arya AP, Lees A, Nirula HC, Klenerman L. A biomechanical comparison of the SACH, Seattle and Jaipur feet using ground reaction forces. Prosthetics and orthotics international, 1995; 19 (1): 37–45. http://www.ncbi.nlm.nih.gov/pubmed/7617457, http://poi.sagepub.com/content/19/1/37.full.pdf (Zugriff am 15.07.2023)
- Arya A, Klenerman L. The Jaipur foot. The Journal of bone and joint surgery, 2008; 90 (11): 1414–1416
- Wagner J, Sienko A, Supan T, Bart D. Motion Analysis of SACH vs. Flex-Foot™ in Moderately Active Below-knee Amputees. Clinical Prosthetics & Orthotics, 1987; 11 (1): 55–62. http://www.oandplibrary.org/cpo/1987_01_055.asp (Zugriff am 15.07.2023)
- Colborne GR, Naumann S, Longmuir PE, Berbrayer D. Analysis of mechanical and metabolic factors in the gait of congenital below knee amputees. A comparison of the SACH and Seattle feet. American Journal of Physical Medicine & Rehabilitation/Association of Academic Physiatrists, 1992; 71 (5): 272–278
- Schneider K, Hart T, Zernicke RF, Setoguchi Y, Oppenheim W. Dynamics of below-knee child amputee gait: SACH foot versus Flex foot. Journal of Biomechanics, 1993; 26 (10): 1191–1204. http://www.ncbi.nlm.nih.gov/pubmed/8253824, http://ac.els-cdn.com/002192909390067O/1‑s2.0–002192909390067O-main.pdf?_tid=02dead02-883e-11e3-83c3-00000aab0f6c&acdnat=1390928746_20f9c4eb9c616334bf56ee1b49ff53bc (Zugriff am 15.07.2023)
- Prince F, Winter DA, Sjonnensen G, Powell C, Wheeldon RK. Mechanical efficiency during gait of adults with transtibial amputation: a pilot study comparing the SACH, Seattle, and Golden-Ankle prosthetic feet. Journal of Rehabilitation Research and Development, 1998; 35 (2): 177–185. http://www.ncbi.nlm.nih.gov/pubmed/9651889 (Zugriff am 15.07.2023)
- Czerniecki JM, Gitter A, Munro C. Joint moment and muscle power output characteristics of below knee amputees during running: the influence of energy storing prosthetic feet. Journal of Biomechanics, 1991; 24 (1): 63–75. http://pubmed.ncbi.nlm.nih.gov/2026634/ (Zugriff am 15.07.2023)
- Lehmann JF, Price R, Boswell-Bessette S, Dralle A, Questad K, deLateur BJ. Comprehensive analysis of energy storing prosthetic feet: Flex Foot and Seattle Foot Versus Standard SACH foot. Archives of Physical Medicine and Rehabilitation, 1993; 74 (11): 1225–1231
- Postema K, Hermens HJ, de Vries J, Koopman HF, Eisma WH. Energy storage and release of prosthetic feet. Part 2: Subjective ratings of 2 energy storing and 2 conventional feet, user choice of foot and deciding factor. Prosthetics and Orthotics International, 1997; 21 (1) 28–34. http://www.ncbi.nlm.nih.gov/pubmed/9141123, http://poi.sagepub.com/content/21/1/28.full.pdf (Zugriff am 15.07.2023)
- Houdijk H, Wezenberg D, Hak L, Cutti AG. Energy storing and return prosthetic feet improve step length symmetry while preserving margins of stability in persons with transtibial amputation. Journal of NeuroEngineering and Rehabilitation, 2018; 15 (1): 76. https://www.ncbi.nlm.nih.gov/pubmed/30255807 , https://www.ncbi.nlm.nih.gov/pmc/articles/PMC6157252/pdf/12984_2018_Article_404.pdf (Zugriff am 15.07.2023)
- Barrios-Muriel J, Romero-Sánchez F, Alonso-Sánchez FJ, Rodríguez Salgado D. Advances in Orthotic and Prosthetic Manufacturing: A Technology Review. Materials (Basel), 2020; 13 (2): 295. https://res.mdpi.com/d_attachment/materials/materials-13–00295/article_deploy/materials-13–00295.pdf (Zugriff am 15.07.2023)
- Curtze C et al. Comparative roll-over analysis of prosthetic feet. Journal of Biomechanics, 2009; 42 (11): 1746–1753. https://www.sciencedirect.com/science/article/pii/S0021929009002097, https://www.sciencedirect.com/science/article/pii/S0021929009002097?via%3Dihub (Zugriff am 15.07.2023)
- Curtze C. Neuromechanics of Movement in Lower Limb Amputees. Dissertationen, Rijksuniversiteit Groningen, 2012. https://pure.rug.nl/ws/files/2481271/Thesis.pdf (Zugriff am 15.07.2023)
- Simon J et al. The Heidelberg foot measurement method: Development, description and assessment. Gait & Posture, 2006; 23 (4): 411–424. http://ac.els-cdn.com/S0966636205001165/1‑s2.0‑S0966636205001165-main.pdf?_tid=319e424a-89b7-11e3-a705-00000aab0f02&acdnat=1391090745_b8e468abf26cc27262ff2816b8861232 (Zugriff am 15.07.2023)
- Greitemann B, Baumgartner R. Grundkurs Technische Orthopädie. Stuttgart: Thieme, 2007
- Hansen AH, Childress DS, Knox EH. Prosthetic foot roll-over shapes with implications for alignment of trans-tibial prostheses. Prosthetics and Orthotics International, 2000; 24 (3): 205–215. http://www.ncbi.nlm.nih.gov/pubmed/11195355 (Zugriff am 15.07.2023)
- Hansen AH, Meier MR, Sam M, Childress DS, Edwards ML. Alignment of trans-tibial prostheses based on roll-over shape principles. Prosthetics and Orthotics International, 2003; 27 (2): 89–99. http://journals.sagepub.com/doi/pdf/10.1080/03093640308726664 (Zugriff am 15.07.2023)
- Hansen AH, Childress DS. Effects of shoe heel height on biologic rollover characteristics during walking. Journal of Rehabilitation Research and Development, 2004; 41 (4): 547–554. https://www.ncbi.nlm.nih.gov/pubmed/15558383 (Zugriff am 15.07.2023)
- Curtze C. Neuromechanics of Movement in Lower Limb Amputees. Dissertationen, Rijksuniversiteit Groningen, 2012. https://pure.rug.nl/ws/files/2481271/Thesis.pdf (Zugriff am 15.07.2023)
- Curtze C et al. Comparative roll-over analysis of prosthetic feet. Journal of Biomechanics, 2009; 42 (11): 1746–1753. http://www.ncbi.nlm.nih.gov/pubmed/19446814, http://ac.els-cdn.com/S0021929009002097/1‑s2.0‑S0021929009002097-main.pdf?_tid=c9430ee0-ccf3-11e2-9806–00000aab0f27&acdnat=1370336000_3397a85843586c3210c5a483763ef5ff (Zugriff am 15.07.2023)
- Curtze C et al. Comparative roll-over analysis of prosthetic feet. Journal of Biomechanics, 2009; 42 (11): 1746–1753. https://www.sciencedirect.com/science/article/pii/S0021929009002097, https://www.sciencedirect.com/science/article/pii/S0021929009002097?via%3Dihub (Zugriff am 15.07.2023)
- Curtze C. Neuromechanics of Movement in Lower Limb Amputees. Dissertationen, Rijksuniversiteit Groningen, 2012. https://pure.rug.nl/ws/files/2481271/Thesis.pdf (Zugriff am 15.07.2023)
- Koo TK, Li MY. A Guideline of Selecting and Reporting Intraclass Correlation Coefficients for Reliability Research. Journal of Chiropractic Medicine, 2016; 15 (2): 155–163. https://www.sciencedirect.com/science/article/pii/S1556370716000158 (Zugriff am 15.07.2023)
- Bapat GM, Myers SA. A robust technique for optimal fitting of roll-over shapes of human locomotor systems. Medical Engineering & Physics, 2022; 100: 103756. https://www.sciencedirect.com/science/article/pii/S1350453322000078 (Zugriff am 15.07.2023)
- De Asha AR, Johnson L, Munjal R, Kulkarni J, Buckley JG. Attenuation of centre-of-pressure trajectory fluctuations under the prosthetic foot when using an articulating hydraulic ankle attachment compared to fixed attachment. Clinical Biomechanics, 2013; 28 (2): 218–224. http://www.ncbi.nlm.nih.gov/pubmed/23261018, https://www.sciencedirect.com/science/article/pii/S0268003312002707?via%3Dihub (Zugriff am 15.07.2023)
- Adamczyk PG, Kuo AD. Mechanical and energetic consequences of rolling foot shape in human walking. The Journal of Experimental Biology, 2013; 216: 2722–2731. http://jeb.biologists.org/content/jexbio/216/14/2722.full.pdf (Zugriff am 15.07.2023)
- Adamczyk PG, Kuo AD. Mechanical and energetic consequences of rolling foot shape in human walking. The Journal of Experimental Biology, 2013; 216: 2722–2731. http://jeb.biologists.org/content/jexbio/216/14/2722.full.pdf (Zugriff am 15.07.2023)
- Adamczyk PG, Kuo AD. Mechanical and energetic consequences of rolling foot shape in human walking. The Journal of Experimental Biology, 2013; 216: 2722–2731. http://jeb.biologists.org/content/jexbio/216/14/2722.full.pdf (Zugriff am 15.07.2023)
- De Asha AR, Johnson L, Munjal R, Kulkarni J, Buckley JG. Attenuation of centre-of-pressure trajectory fluctuations under the prosthetic foot when using an articulating hydraulic ankle attachment compared to fixed attachment. Clinical Biomechanics, 2013; 28 (2): 218–224. http://www.ncbi.nlm.nih.gov/pubmed/23261018, https://www.sciencedirect.com/science/article/pii/S0268003312002707?via%3Dihub (Zugriff am 15.07.2023)
- De Asha AD, Munjal R, Kulkarni J, Buckley JG. Impact on the biomechanics of overground gait of using an ‘Echelon’ hydraulic ankle-foot device in unilateral trans-tibial and trans-femoral amputees. Clinical Biomechanics, 2014; 29 (7): 728–734. http://www.ncbi.nlm.nih.gov/pubmed/24997811 (Zugriff am 15.07.2023)
