Einleitung
Die Wiederherstellung der Steh- und Gehfähigkeit gilt als grundlegendes Rehabilitationsziel nach einer Amputation an der unteren Extremität 1. Jeder Beinamputierte benötigt dazu – unabhängig von seinem Mobilitätsgrad – einerseits eine stabil belastbare Prothese beim Stehen und in der Standphase bei der Fortbewegung; andererseits muss während der Schwungphase genügend Bodenfreiheit gegeben sein, sodass der Unterschenkel ungehindert nach vorne schwingen kann. Diese grundsätzlichen Forderungen können nur mit einem biomechanisch korrekten Prothesenaufbau erfüllt werden. Dieser beeinflusst nachhaltig die Versorgungs- und letztlich die Lebensqualität des Amputierten. Beispielsweise hängen die Schrittsymmetrie, die Belastung der Gelenke und auch die Sauerstoffaufnahme beim Gehen vom Prothesenaufbau ab 23. Der Prothesenaufbau erfolgt in der Versorgungspraxis in drei Schritten:

- Werkstatt- oder Grundaufbau (präzise Montage der Prothese, in der Regel nach Herstellerangaben)
- statischer Prothesenaufbau (Justieren der Prothese am stehenden Patienten)
- dynamische Aufbauoptimierung (Feinjustierung nach Bewertung des Ganges)
Dieser Artikel befasst sich hauptsächlich mit dem statischen Prothesenaufbau, den Aufbauvorgaben und seinen Objektivierungsmöglichkeiten durch die L.A.S.A.R.-Technologie. Dabei steht das Akronym „L.A.S.A.R“ für „Laser Assisted Static Alignment Reference“.
Erfahrungen mit dem Statik-Messgerät L.A.S.A.R. Posture
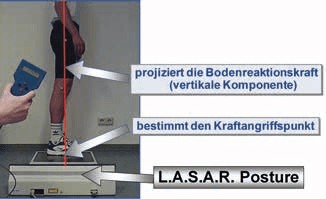
Die Erfassung der Statik erfordert Hilfsmittel, die die wirkenden Kräfte und Drehmomente beim Stehen sichtbar machen. Vor 20 Jahren wurde das L.A.S.A.R. Posture als erstes Messgerät eingeführt, das einen statisch objektiven Prothesenaufbau unter Werkstattbedingungen erlaubt. Das Gerät bestimmt den Kraftangriffspunkt und projiziert durch eine vertikale Laserlinie die Vertikalkomponente der Bodenreaktionskraft auf die stehende Person (Abb. 1). Abstände dieser Linie zu relevanten Aufbaubezugspunkten – beispielsweise Gelenkdrehzentren – sind messbar 4. Steht die zu vermessende Person mit beiden Beinen auf der Kraftmessplatte, wird die Körperschwerpunktlinie ermittelt; steht sie mit einem Bein auf der Kraftmessplatte und mit dem zweiten Bein auf der Höhenausgleichsplatte, wird die Belastungs- oder Lastlinie dargestellt.
Die intensive wissenschaftliche Begleitung dieses Verfahrens mit einer Vielzahl von Studien und das stete Hinterfragen dieser komplett neuen Technologie durch den Nutzer in der Versorgungspraxis führten zu klaren Empfehlungen zum biomechanisch begründeten Prothesenaufbau von der Unterschenkel- bis zur Beckenkorbprothese. Die Empfehlungen unterscheiden sich wesentlich je nach dem Amputationsniveau, wie im Folgenden aufgezeigt wird.
Prothesenaufbau bei transtibialer Amputation
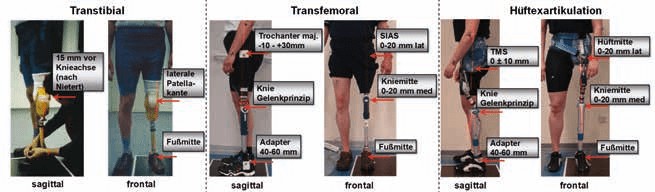
Der Aufbau der Unterschenkelprothese beeinflusst nachhaltig die Funktion des erhaltenen Kniegelenks beim Stehen und Fortbewegen 5. Dabei wird als biomechanische Zielsetzung eine physiologische Kniefunktion angestrebt. Die biomechanischen Grundlagen des Prothesenaufbaus und dessen Auswirkungen auf die Kniefunktion beim Stehen und Gehen wurden vielfach untersucht 6789. Sie wurden in praktische Aufbauanleitungen umgesetzt, die sich in der Patientenversorgung täglich und weltweit bewähren. Für den individuellen Aufbau nutzt der Orthopädie- Techniker die moderne Messtechnik für die Statik-Analyse und beobachtet den Amputierten beim Gehen. Es wird dafür Sorge getragen, dass das Gangbild die Merkmale der physiologischen Kniefunktion aufweist und dass dabei entsprechende Statikkriterien (Abb. 2a) erfüllt werden.
Prothesenaufbau bei Knieexartikulation und transfemoraler Amputation
Der Aufbau beeinflusst nachhaltig die Sicherheit und die Funktion der Prothese beim Stehen und Gehen des Knieex- und Oberschenkelamputierten. Als biomechanisches Ziel wird eine sichere Kniefunktion angestrebt. Für die Wiedererlangung der Steh- und Gehfähigkeit ist die Zuordnung des Prothesenfußes zum Hüftgelenk mit dem zweckmäßig flektierten sowie adduzierten Stumpf elementar. Dies folgt aus den mechanischen Regeln der Fortbewegung. Das Kniegelenk wird dem Funktionsprinzip entsprechend zwischen Prothesenfuß und Schaft eingeordnet. Auf die technische Funktionsweise des Gelenkes selbst kann über den Prothesenaufbau nur sehr beschränkt Einfluss genommen werden 10. Oberschenkelprothesen werden zunächst im Aufbaugerät montiert und präzise justiert. Von Seiten der Hersteller der Prothesenkomponenten wird die Einordnung von Fuß und Kniegelenk vorgegeben. Adduktion und Flexion des Schaftes werden individuell spezifiziert. Bewegungseinschränkungen des Hüftgelenks, bedingt durch eine Beugekontraktur, müssen ebenfalls berücksichtigt werden. In den meisten Fällen reicht nach präziser Montage der Prothese die Justierung der Plantarflexion beim stehenden Patienten aus, um die Statikkriterien zu erfüllen (Abb. 2b). Voraussetzung ist allerdings, dass der proximale Bereich des Schafts so gestaltet wurde, dass die Kraft zwischen Prothese und Körper möglichst zentral und nicht randständig übertragen werden kann. Die Differenz zwischen der Belastungslinie und der Körperschwerpunktlinie soll sagittal nicht mehr als 15 mm betragen. In der Gehprobe werden die Flexions- und die Adduktionsstellung des Stumpfes sowie die transversale Rotation des Kniegelenks überprüft und eventuell korrigiert. Deutlich asymmetrische Schrittlängen weisen auf eine inkorrekte Schaftflexion hin.
Prothesenaufbau bei Hüftexartikulation
Der Aufbau beeinflusst die Sicherheit und die Funktion der Prothese beim Stehen und Gehen des Hüftexartikulierten. Als biomechanisches Ziel werden eine sichere Kniefunktion und zumindest eine Grundfunktion des Hüftgelenks angestrebt. Primär für die Wiedererlangung der Steh- und Gehfähigkeit ist die Zuordnung des Prothesenfußes, des Knie- und des Hüftgelenks zum Beckenschaft.
Umfangreiche Studien zeigen, dass der Teilmassenschwerpunkt (TMS) für den Prothesenaufbau der entscheidende Bezugspunkt ist1112. Damit wird der Prothesenaufbau unabhängig vom Design des Beckenschafts. Hüftgelenk, Kniegelenk und Prothesenfuß werden zu diesem Bezugspunkt mit neutraler Beckenschaftstellung im Aufbaugerät justiert. Der statische Aufbau besteht ausschließlich in der Justierung der Plantarflexion, sodass die Aufbaukriterien erfüllt werden (Abb. 2c). Während der Gehprobe muss die Adduktions- und Rotationsstellung des Beckenschaftes zum Hüft- und Kniegelenk überprüft werden.
Das neue 3D L.A.S.A.R. mit seinen Zusatzfunktionen und ‑informationen
Technische Eigenschaften
Aufgrund der stetigen Weiterentwicklung von elektronischen Komponenten wie Mikrocomputern, Sensoren und hochauflösenden Kamerachips konnte das Prinzip des L.A.S.A.R. Posture technisch in die digitale Welt überführt werden. Das neue 3D L.A.S.A.R. ist ein Messsystem, bestehend aus einer mit Sensoren instrumentierten zweiteiligen Kraftmessplatte, vier 5‑Megapixel- CMOS-Kameras, einer zentralen Recheneinheit sowie einem Tablet als Bedienelement (Abb. 3a).
Beide Messplatten des 3D L.A.S.A.R. sind mit je vier Wägezellen und drei Kraftsensoren auf der Basis von Vollbrücken-Dehnmessstreifen identisch ausgestattet. Relevante Belastungsparameter beider Beine werden dadurch gleichzeitig erfasst. Zusätzlich zu den daraus resultierenden Krafteinleitungspunkten (Center of Pressure: COP) auf den Messplatten und den vertikalen Bodenreaktionskraftkomponenten können die wirkenden Horizontalkräfte gemessen werden. Auch die Erfassung der Torsionsmomente um die vertikale Achse des Koordinatensystems der Bodenreaktionskraft ist möglich. Aus diesen Informationen können zum einen die vertikalen Komponenten der Bodenreaktionskraft auch „Lastlinien“ genannt – für beide unteren Extremitäten zeitgleich auf dem Tablet dargestellt werden (sogenannter „Legacy Mode“ in 2D) (Abb. 3b). Zum anderen können durch die Einbeziehung der Horizontalkräfte die Bodenreaktionskraftvektoren an der Unterstützungsstelle ermittelt und wahlweise in der Sagittal- oder Frontalebene auf dem Bildschirm des Tablets dargestellt werden (sogenannter „3D Mode“). Zur Bestimmung der Abstände zwischen den Lastlinien oder Kraftvektoren zu den Referenzpunkten (z. B. Kniegelenksdrehachse) lassen sich auf dem gespeicherten Bild virtuelle Messinstrumente oder Abstandslehren einfügen (Abb. 3c: M2 und M3). Um eine genaue Positionierung dieser Messhilfen zu ermöglichen, kann in das Bild hineingezoomt werden.
Die digitale Darstellung der Messwerte lässt erstmals eine Datenspeicherung zu, die zur Dokumentation und Analyse der Statiksituation auch nach der Messsitzung genutzt werden kann. Neben den Bildern und Daten der Messsituation können zusätzlich Kommentarfelder eingefügt werden, die zum Beispiel Hinweise für die nächsten Versorgungsschritte enthalten. Grundlage der Datenspeicherung ist eine passwortverschlüsselte SQL-Datenbank, in der sowohl die Bilder als auch die Patientendaten geschützt abgelegt sind. Die Datenbank ist auf einer SD-Karte abgelegt. Durch Austausch der SDKarte ist das Arbeiten mehrerer Nutzer mit ihren eigenen Datenbanken an einem Gerät möglich.
Vor Inbetriebnahme des Messsystems werden die Kameras und die Kraftmessplatte in einer definierten Position zueinander ausgerichtet. Ein auf dem Tablet-Bildschirm eingeblendeter Rahmen unterstützt diese Positionierung. Nachdem die Kameras die aufleuchtenden LEDs in den Ecken der Kraftmessplatte erfasst haben, gleicht ein integrierter Kalibrieralgorithmus die auf dem Tablet grafisch dargestellten Vektoren den gemessenen Kräften an. Auf diese Weise ist eine millimetergenaue größen‑, winkel- und positionsskalierte Projektion der wirkenden Bodenreaktionskräfte auf die zu vermessende Person auf dem Tablet-Bildschirm möglich. Ein Button im Bedienfeld des Tablets erlaubt die Umschaltung zwischen der sicht der Sagittal- und der Frontalebene.
Vorteile bei der statischen Aufbauoptimierung
Ein wesentlicher Vorteil des 3D L.A.S.A.R. besteht in der zeitgleichen Betrachtung und Analyse der statischen Belastung beider unteren Extremitäten: Auf einen Blick können statisch ungünstige Belastungssituationen ermittelt werden, und es lassen sich daraus unmittelbar Optimierungen des Aufbaus des Hilfsmittels ableiten, ohne dass der Patient eine andere Stehposition auf dem Gerät einnehmen muss. Nach Änderung der Aufbaukonfiguration des Hilfsmittels an einer Extremität werden die statischen Auswirkungen auf die andere Extremität sofort sichtbar. Durch die zusätzlichen Informationen im „3D Mode“ über den tatsächlichen Verlauf der Kraftvektoren können die realen Abstände zwischen den Vektoren und den jeweiligen Referenzpunkten bestimmt werden, sodass eine präzise Erfassung der statischen Belastung möglich wird.
Zur Unterstützung eines optimalen individuellen statischen Aufbaus des orthopädietechnischen Hilfsmittels (z. B. TT- oder TF-Prothese) sind unter einem Menüpunkt in der Tablet-Software Tutorials zum Prothesenaufbau oder auch Referenzwerte für verschiedene Prothesenkomponenten verfügbar. Mit Hilfe der auf dem Tablet dargestellten Statiksituation kann diese dem Patienten erklärt und nächste Optimierungsschritte erläutert werden. Zu Schulungszwecken größerer Gruppen ist das System zusätzlich mit einem Interface für die externe Projektion des Bildschirminhaltes ausgestattet.
Erste Erfahrungen mit dem 3D L.A.S.A.R. bei einer nichtamputierten Vergleichsgruppe
Bei praktischen Anwendungen im Bereich der Prothetik und Orthetik ist für viele Fragestellungen die Orientierung an den Durchschnittswerten nichtamputierter Probanden sinnvoll. Bei der Nutzung des konventionellen L.A.S.A.R. Posture war zu beachten, dass die Messwerte die Abstände von der vertikalen Kraftwirkungslinie zu den Referenzpunkten repräsentierten. Mit dem 3D L.A.S.A.R. können nun die Abstände zwischen der Wirkungslinie des „realen“ Kraftvektors und den Referenzpunkten gemessen werden. Um die Differenzen der Messwerte beider Varianten des L.A.S.A.R. Posture zu überprüfen und Referenzwerte für die Nutzung des 3D L.A.S.A.R. zu erhalten, wurde eine Gruppe von 50 neurologisch und orthopädisch unauffälligen Probanden (29 ± 8 Jahre, 177 ± 9 cm, 73 ± 10 kg, männlich: n = 31, weiblich: n = 19) vergleichend mit beiden L.A.S.A.R.-Versionen untersucht. Für eine standardisierte Ausgangssituation wurden die Probanden vor der Erfassung der Werte mit dem L.A.S.A.R. Posture instruiert, in ihrer normalen Stehbreite auf dem Messgerät zu stehen. Als weiteres Kriterium waren die Füße in anterior-posteriorer Richtung auf einer Höhe zu positionieren. Die individuelle Stehbreite wurde gemessen. Bei der anschließenden Messung auf dem 3D L.A.S.A.R. konnten somit die Positionen der Füße reproduziert werden. Die Resultate wurden für beide Beine gemittelt, sodass sich Mittelwerte für jeweils 100 Extremitäten ergaben (Abb. 4).
Erwartungsgemäß zeigen sich dabei in der Sagittalebene nur relativ geringe Abweichungen, die von distal nach proximal leicht zunehmen. Für den in der Anwendung oftmals wichtigen Abstand zwischen der Kraftwirkungslinie und der Kompromissdrehachse des Kniegelenks 13 wurde mit dem 3D L.A.S.A.R. ein mittlerer Abstand von ca. 20 mm mit einer Standardabweichung von ca. 15 mm gemessen. In der Frontalebene sind die Abweichungen deutlich stärker ausgeprägt. Dies erklärt sich aus der beidbeinigen Abstützung des Körpers, mit der im Vergleich zur Sagittalebene höhere horizontale Kräfte verbunden sind. Die Mittelwerte der nichtamputierten Vergleichsgruppe sind durch eine hohe Standardabweichung gekennzeichnet, was auf die bekannten großen individuellen Unterschiede hinweist. Trotzdem können diese Werte als sinnvolle Orientierungsgrößen angesehen und genutzt werden.
Exemplarisch ist in Abbildung 5 eine Messung mit dem 3D L.A.S.A.R. in beiden Modi anhand eines Einzelbeispiels dargestellt. Die im „Legacy Mode“ gemessene Situation vermittelt in der Frontalebene eine Information, die identisch mit dem L.A.S.A.R. Posture ist. Im „3D Mode“ nehmen die Abstände von distal nach proximal zu (Malleolus lateralis: ca. 10 mm; Spina iliaca anterior superior: ca. 40 mm). Am Kniegelenk ist die mit dem L.A.S.A.R. Posture gemessene Lastlinie ca. 15 bis 20 mm lateral positioniert (vergleichbar mit 3D L.A.S.A.R. im „Legacy Mode“: ca. 20 mm); die reale Wirkungslinie des Kraftvektors, gemessen im „3D Mode“, verläuft nahezu durch die Kniemitte.
Erste Versorgungserfahrungen mit dem 3D L.A.S.A.R. und Empfehlungen für den Prothesenaufbau nach transtibialer und transfemoraler Amputation
Zur Erstellung der Basis für Referenzdaten von transtibial (TT) und transfemoral (TF) Amputierten wurden insgesamt 15 Probanden (5 TT: 43 ± 11 J., 174 ± 9 cm, 73 ± 16 kg, männlich: 3, weiblich: 2; 10 TF: 46 ± 10 J., 176 ± 8 cm, 87 ± 13 kg, männlich: 8, weiblich: 2) rekrutiert. Diese wurden zuvor gemäß den bekannten Aufbauempfehlungen von Blumentritt für Unterschenkelprothesen 14151617[4–7] bzw. für Oberschenkelprothesen 18 versorgt. Die Messungen erfolgten getrennt jeweils für die betroffene und die erhaltene Seite sowohl mit dem L.A.S.A.R. Posture als auch mit dem neuen 3D L.A.S.A.R. Somit ergaben sich Werte für die folgenden Messsituationen:
- L.A.S.A.R. Posture
- 3D L.A.S.A.R. im „Legacy Mode“
- 3D L.A.S.A.R. im „3D Mode“
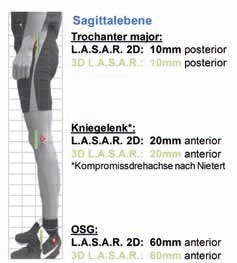
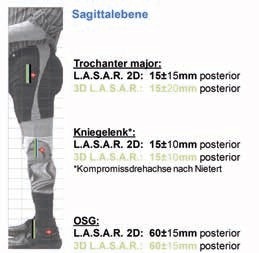
Die daraus resultierenden Empfehlungen für Abstände zwischen der Lastlinie (L.A.S.A.R. Posture, 3D L.A.S.A.R. im „Legacy Mode“) bzw. dem Kraftvektor (3D L.A.S.A.R. im „3D Mode“) und den jeweiligen Referenzpunkten sind in den Abbildungen 6 (TT) und 7 (TF) zusammengefasst. Für die Versorgungspraxis ergeben sich daraus folgende grundlegende Schlussfolgerungen:
Aufbau von Transtibial-Prothesen
Die Messwerte mit dem L.A.S.A.R. Posture und dem 3D L.A.S.A.R. im „Legacy Mode“ sind sowohl für die Prothesenseite als auch für die erhaltene Seite in beiden Ebenen (sagittal und frontal) nahezu identisch (Abb. 6). Daraus kann abgeleitet werden, dass die bisherigen Aufbauempfehlungen für TT-Prothesen mit Hilfe des L.A.S.A.R. Posture direkt auf das 3D L.A.S.A.R. im „Legacy Mode“ übertragbar sind. Das gilt für die Abstände zwischen der Lastlinie und den Referenzpunkten Malleolus lateralis (abgekürzt: OSG), Kniegelenkskompromissdrehachse (abgekürzt: Kniegelenk), Trochanter major und Spina iliaca anterior superior. Die Werte im „3D Mode“ (3D L.A.S.A.R.) weichen von denen im „Legacy Mode“ ab, wobei die Abweichungen in der Sagittalebene bei gutem Prothesenaufbau aufgrund der vergleichsweise kleinen Horizontalkraft gering sind. Die Abweichungen in der Frontalebene sind vor allem prothesenseitig deutlich ausgeprägt. Hier verläuft der Kraftvektor am Knie entlang der medialen Patellakante (L.A.S.A.R. Posture und 3D L.A.S.A.R. im „Legacy Mode“: laterale Patellakante) und ca. 80 mm medial der Spina (L.A.S.A.R. Posture und 3D L.A.S.A.R. im „Legacy Mode“: 0 bis 20 mm medial).
Aufbau von Transfemoral-Prothesen
Die Messwerte mit dem L.A.S.A.R. Posture und dem 3D L.A.S.A.R. sind im „Legacy Mode“ wie bei den Transtibial- Prothesen sowohl für die Prothesenseite als auch für die erhaltene Seite in beiden Betrachtungsebenen (sagittal und frontal) nahezu identisch (Abb. 7). Somit sind auch für TF-Prothesen die bisherigen Aufbauempfehlungen des L.A.S.A.R. Posture direkt auf das 3D L.A.S.A.R. im „Legacy Mode“ übertragbar. Das gilt für alle Abstände zwischen der Lastlinie und dem jeweiligen Referenzpunkt (Malleolus lateralis [abgekürzt OSG], Kniegelenk, Trochanter major und Spina iliaca anterior superior).
Die Werte im „3D Mode“ (3D L.A.S.A.R.) weichen jedoch in beiden Ebenen (sagittal und frontal) von denen im „Legacy Mode“ ab. Auf der Prothesenseite führt das dazu, dass die Abstände in der Sagittalebene zwischen Kraftvektor und Kniegelenk bzw. Trochanter major um ca. 5 bis 10 mm geringer sind und somit der Kraftvektor auf der Prothesenseite etwas weiter posterior als bei der gesunden Vergleichsgruppe verläuft. Dies kann auf ein Spezifikum von TF-Prothesenversorgungen hindeuten, bei denen die Kraftübertragungsstelle im proximalen Schaftbereich posterior des Trochanter major liegen kann.
In der Frontalebene verlaufen die Kraftvektoren bei den Messungen im „3D Mode“ mit dem 3D L.A.S.A.R. im Fall der TF-Amputierten auf Höhe der Spina iliaca anterior superior ca. 10 mm weiter medial als bei der gesunden Vergleichsgruppe. Es liegt die Vermutung nahe, dass auf der Prothesenseite durch den weiter medial befindlichen Kraftübertragungspunkt am Schaft höhere Horizontalkräfte in mediolateraler Richtung wirken, die auch von der kontralateralen Seite kompensiert werden müssen. Somit neigen sich die Krafvektoren tendenziell stärker zur Körpermitte.
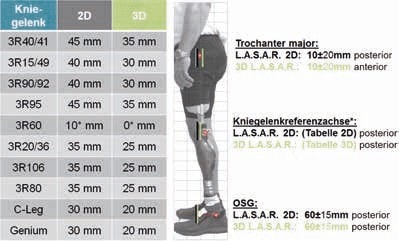
Bei unterschiedlichen Kniegelenkstypen lassen sich auch für das 3D L.A.S.A.R. individuelle Empfehlungen für Abstände zwischen dem Kraftvektor und der Kniegelenkreferenzachse in der Sagittalebene formulieren. Diese sind in Abbildung 8 in Ergänzung zu den bekannten Angaben für das L.A.S.A.R. Posture zusammengefasst.
Für beide Amputationsniveaus (TT und TF) werden mit dem 3D L.A.S.A.R. auf der kontralateralen Seite in der Sagittalebene nahezu identische Abstände zwischen den jeweiligen Referenzpunkten und der Lastlinie („Legacy Mode“) beziehungsweise dem Kraftvektor („3D Mode“) festgestellt. Somit sind bisherige Empfehlungen bezüglich der Beinstatik der erhaltenen Seite weiterhin gültig.
Hinweise zur statischen Aufbauoptimierung im „3D Mode“
Durch die simultane Anzeige beider Kraftvektoren können in der Sagittal Sagittalebene zwei unterschiedliche Effekte getrennt voneinander beobachtet werden:
- Der horizontale Abstand der Vektoren auf der Kraftmessplatte ist durch voneinander entfernt liegende Krafteinleitungspunkte begründet (Abb. 9b im „Legacy Mode“ und 9c im „3D Mode“). Dies kann zum Beispiel durch die Änderung der Plantarflexionsstellung des Fußteils angepasst werden.
- Der Abstand der Vektoren auf Höhe der Trochanter major ist gegebenenfalls durch ein unnatürliches Hüftmoment in der Sagittalebene und/ oder in der Transversalebene begründet oder kann durch eine unnatürliche Beckenrotation verursacht sein. Häufig sind ungünstige Schaftstellungen in den genannten Ebenen die Ursache hierfür (Abb. 9 d).
Ziel der statischen Aufbauoptimierung in der Sagittalebene ist es,
- dass die Kraftvektoren in den empfohlenen Abständen zu den Referenzpunkten verlaufen,
- dass die Abstände der Krafteinleitungspunkte auf Höhe der Kraftmessplatte in anterior-posteriorer Richtung deckungsgleich sind oder maximal 20 mm voneinander entfernt verlaufen und
- dass die Kraftvektoren der Prothesenseite und der erhaltenen Seite in der Sagittalebene möglichst deckungsgleich sind.
Sind diese Kriterien erfüllt, kann davon ausgegangen werden, dass sowohl die erhaltenen Gelenkstrukturen als auch die Prothesenkomponenten gemäß den biomechanischen Kriterien sinnvoll belastet werden und keine unnatürlich großen horizontalen Bodenreaktionskräfte wirken, die eine Verspannung im Stumpf-Schaft-Interface und der Beckenregion verursachen können. Die Auswirkungen der Horizontalkräfte auf den tatsächlichen Verlauf der Bodenreaktionskräfte sind direkt nur im „3D Mode“ des 3D L.A.S.A.R. erkennbar (Abb. 9 c u. d).
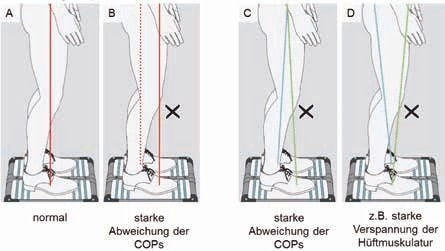
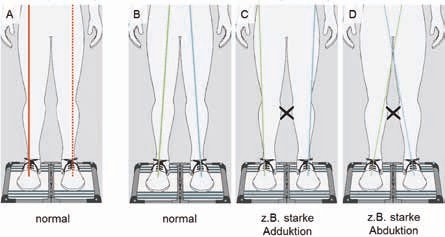
In der Frontalebene sollten die Kraftangriffspunkte in der Fußmitte liegen und der Kraftvektor im empfohlenen Abstand zur Kniegelenksmitte und der Spina iliaca anterior superior verlaufen – gemäß den Angaben für das jeweilige Amputationsniveau. In Abbildung 10 ist unter a („Legacy Mode“) und b („3D Mode“) eine natürliche statische Situation schematisch dargestellt. In c und d wirken außergewöhnlich hohe horizontale Bodenreaktionskräfte, die zu einer starken Neigung der Kraftvektoren führen und nur mit dem 3D L.A.S.A.R. derart darstellbar sind. In diesen Fällen kann von einer starken Verspannung im Beckenbereich ausgegangen werden.
Fazit
Mit dem 3D L.A.S.A.R. können im Vergleich zum L.A.S.A.R. Posture weitere Parameter und Informationen zur statischen Optimierung des Prothesenund Orthesenaufbaus genutzt werden, wodurch die Qualität der Patientenversorgung verbessert wird. Gleichzeitig eröffnen sich neue Möglichkeiten der Dokumentation und der nachträglichen Analyse. Daraus ergeben sich weitere Vorteile für den Orthopädie-Techniker in seiner alltäglichen Versorgungspraxis, ein orthopädietechnisches Hilfsmittel der unteren Extremität unter Einhaltung biomechanischer Prinzipien herzustellen. Durch die Möglichkeiten der Dokumentation wird zusätzlich der Dialog mit Patienten und Kostenerstattern bezüglich der Sicherung der Versorgungsqualität erleichtert.
Für die Autoren:
Dipl.-Ing. (FH) Malte Bellmann
CPO Otto Bock HealthCare GmbH Forschung Biomechanik Clinical Research & Services
Hermann-Rein-Str. 2a
37075 Göttingen
malte.bellmann@ottobock.de
Begutachteter Beitrag/reviewed paper
Bellmann M., Blumentritt S., Pusch M., Schmalz T., Schönemeier M. Das 3D L.A.S.A.R. – eine neue Generation der Statik-Analyse zur Optimierung des Aufbaus von Prothesen und Orthesen. Orthopädie Technik. 2017; 68 (12): 18–25







- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Greitemann B, Brückner L, Schäfer M, Baumgartner R. Amputation und Prothesenversorgung. Indikationsstellung – operative Technik – Nachbehandlung – Funktionstraining. 4., vollständig überarbeitete Auflage. Stuttgart, New York: Thieme Verlag, 2016
- Blumentritt S. Ganganalyse. In: Greitemann B, Brückner L, Schäfer M, Baumgartner R. Amputation und Prothesenversorgung. Indikationsstellung – operative Technik – Nachbehandlung – Funktionstraining. 4., vollständig überarbeitete Auflage. Stuttgart, New York: Thieme Verlag, 2016: 546–556
- Schmalz T, Blumentritt S, Jarasch R. Energy expenditure and biomechanical characteristics of lower limb amputee gait: The influence of prosthetic alignment and different prosthetic components.
Gait Posture, 2002; 16 (3): 255–263 - Blumentritt S. A new biomechanical method for determination of static prosthetic alignment. Prosthet Orthot Int, 1997; 21 (2): 107–113
- Blumentritt S, Schmalz T, Jarasch R. Die Bedeutung des statischen Prothesenaufbaus für das Stehen und Gehen des Unterschenkelamputierten. Orthopäde, 2001; 30 (3): 161–168
- Blumentritt S. A new biomechanical method for determination of static prosthetic alignment. Prosthet Orthot Int, 1997; 21 (2): 107–113
- Blumentritt S, Schmalz T, Jarasch R. Die Bedeutung des statischen Prothesenaufbaus für das Stehen und Gehen des Unterschenkelamputierten. Orthopäde, 2001; 30 (3): 161–168
- Blumentritt S. Aufbau von Unterschenkelprothesen mittels „L.A.S.A.R. Posture“. Orthopädie Technik, 1998; 49 (12): 938–945
- Blumentritt S, Schmalz T, Jarasch R, Schneider M. Effects of sagittal plane prosthetic alignment on standing trans-tibial amputee knee loads. Prosthet Orthot Int, 1999; 23 (3): 231–238
- Blumentritt S, Scherer HW, Michael JW, Schmalz T. Transfemoral amputees walking on a rotary hydraulic prosthetic knee mechanism: A preliminary report. J Prosthet Orthot, 1998; 10 (3): 61–70
- Bellmann M, Ludwigs E, Blumentritt S. Die TMS-Methode zum Aufbau von Beckenkorbprothesen. Orthopädie Technik, 2012; 63 (4): 30–41
- Ludwigs E, Bellmann M, Schmalz T, Blumentritt S. Biomechanical differences between two exoprosthetic hip joint systems during level walking. Prosthet Orthot Int, 2010; 34 (4): 449–460
- Nietert M. Das Kniegelenk des Menschen als biomechanisches Problem. Biomedizinische Technik, 1977; 22 (1–2): 13–
- Blumentritt S. A new biomechanical method for determination of static prosthetic alignment. Prosthet Orthot Int, 1997; 21 (2): 107–113
- Blumentritt S, Schmalz T, Jarasch R. Die Bedeutung des statischen Prothesenaufbaus für das Stehen und Gehen des Unterschenkelamputierten. Orthopäde, 2001; 30 (3): 161–168
- Blumentritt S. Aufbau von Unterschenkelprothesen mittels „L.A.S.A.R. Posture“. Orthopädie Technik, 1998; 49 (12): 938–945
- Blumentritt S, Schmalz T, Jarasch R, Schneider M. Effects of sagittal plane prosthetic alignment on standing trans-tibial amputee knee loads. Prosthet Orthot Int, 1999; 23 (3): 231–238
- Otto Bock HealthCare GmbH. Aufbauempfehlungen für Oberschenkelprothesen mit L.A.S.A.R. Posture Poster). 2008 https://professionals.ottobockus.com/media/pdf/646F219-GB-12–1308w.pdf
