Einleitung
Bei Orthesenversorgungen von Patienten mit Paresen und Paralysen der unteren Extremität wurde in der Vergangenheit oftmals die Knie-Knöchel-Fuß-Orthese (KAFO) mit kompletter Sperre des Kniegelenks eingesetzt. Dieses „klassische” Prinzip der kompletten Beinversteifung gewährleistet beim Gehen zwar die Sicherheit der Patienten, ist aber mit biomechanischen und metabolischen Nachteilen verbunden. Hierzu zählen u. a. eine spürbare Überlastung des Bewegungsapparats 1 und ein abnorm hoher metabolischer Energiebedarf 2.
Die seit etwa 10 Jahren verfügbaren Orthesen mit nur in der Standphase verriegeltem und in der Schwungphase entriegeltem Kniegelenk (englisch: Stance Control Orthosis – SCO) ermöglichen beim ebenen Gehen einen natürlicheren Bewegungsablauf und somit eine messbare Reduzierung der Nachteile der konventionellen Versorgungen 3. Die für den Patientenalltag bedeutsamste funktionelle Limitierung der SCO besteht darin, dass keine gedämpfte Knieflexion unter Belastung möglich ist. Hierdurch sind beispielsweise wichtige Bewegungsabläufe der Alltagsmotorik wie das näherungsweise natürliche alternierende Abwärtsgehen auf Schrägen und Treppen oder das Hinsetzen unter Belastung der Orthese unmöglich.
Durch die neuentwickelte C‑Brace-Orthese (Abb. 1) steht erstmals ein Orthesensystem zur Verfügung, welches die funktionellen Einschränkungen der SCO-Systeme reduziert. Die in der C‑Brace-Orthese integrierte mikroprozessorgesteuerte Hydraulikeinheit stellt im Kniegelenk für alle Situationen der Alltagsmotorik individuell angepasste Bewegungswiderstände zur Verfügung. Dies ermöglicht u. a. das alternierende Abwärtsgehen auf Schrägen und Treppen mit spezifischer Dämpfung der Knieflexion, die geschwindigkeitsangepasste Steuerung der Schwungphase und eine Reduzierung der Sturzgefahr.
Über konstruktive Details der C‑Brace-Orthese und erste Patientenerfahrungen wurde bereits in einer früheren Arbeit berichtet 4. Im vorliegenden Beitrag werden die Ergebnisse biomechanischer Tests von Bewegungsabläufen des Alltags vorgestellt, mithilfe derer die Funktionalitäten konventioneller Beinorthesen (komplette Kniesperre und SCO) mit denen der C‑Brace-Orthese verglichen werden können.
Bei der Diskussion der Messergebnisse steht der zusätzliche Patientennutzen, der sich aus den technischen Neuerungen der C‑Brace-Orthese ergibt, im Fokus.
Methoden
Patienten und Kontrollgruppe
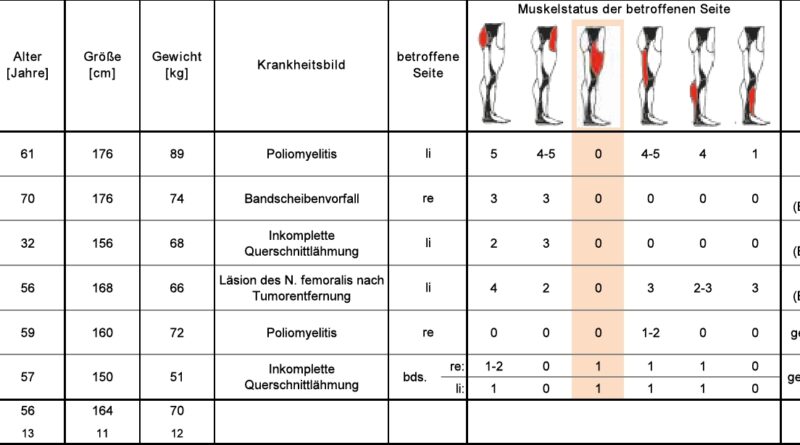
An der Untersuchung nahmen 6 Patienten unterschiedlicher Grunderkrankungen und klinischer Erscheinungsbilder teil, die im Alltag mit einer KAFO orthetisch vorversorgt waren. In 4 Fällen bestand diese Versorgung aus einem SCO-System (unilateral). Zwei Patienten konnten aus Sicherheitsgründen nicht mit einer SCO versorgt werden und nutzten deshalb eine individuell gefertigte KAFO mit kompletter Sperre des Kniegelenks (1 × unilateral, 1 × bilateral). Detaillierte Angaben der Patienten, einschließlich des Muskelstatus der Hauptmuskelgruppen der unteren Extremität, sind in Tabelle 1 zusammengefasst.
Zur allgemeinen Einschätzung der Resultate standen die Werte einer orthopädisch und neurologisch unauffälligen Kontrollgruppe, die in einer früheren Studie mit identischer Messtechnik untersucht wurde, zur Verfügung 5.
C‑Brace-Orthese
Die C‑Brace-Orthese (siehe Abb. 1) repräsentiert eine individuell gefertigte KAFO mit einer mikroprozessorgesteuerten Kniegelenkseinheit. Mithilfe eines Kniewinkelsensors und eines Systems von Dehnungsmessstreifen, das auf einer knöchelübergreifenden Faserverbundfeder angebracht ist, werden fortlaufend drei essentielle biomechanische Parameter ermittelt: Kniewinkel, Kniewinkelgeschwindigkeit und Knöchelmoment. Aus diesen Informationen wird die jeweilige Bewegungsphase identifiziert und eine Linearhydraulik gesteuert. Mit einer Arbeitsfrequenz von 50 Hz werden dadurch die erforderlichen Bewegungswiderstände des Kniegelenks bewegungs- und geschwindigkeitsabhängig angepasst. Das bedeutet, dass eine Knieflexion unter Belastung und eine Steuerung der Schwungphase individuell optimiert realisiert werden kann. Eine ausführlichere Darstellung der technischen Prinzipien kann in der bereits erwähnten früheren Arbeit nachgelesen werden 6.
Durchgeführte Untersuchungen
Alle untersuchten Patienten wurden während der kontrollierten Markteinführung des C‑Brace-Systems mit diesem versorgt. Bei einem ersten Termin im Labor wurden zunächst die biomechanischen Tests mit der bisherigen Alltagsversorgung durchgeführt. Diese bestanden aus der ganganalytischen Vermessung des ebenen Gehens bei selbstgewählter Geschwindigkeit. Da eine Patientin (Patientennummer 4 in Tab. 1) die Gehgeschwindigkeit spürbar variieren konnte, wurde in diesem Fall das Gehen neben der selbstgewählten Geschwindigkeit auch bei reduzierter und erhöhter Geschwindigkeit vermessen. Bei den Patienten, die in der Lage waren, Rampe oder Treppe mit einer alternierenden Schrittfolge zu bewältigen, wurden auch diese Bewegungsabläufe messtechnisch erfasst.
Nach diesen Tests erfolgten die Versorgung mit der C‑Brace-Orthese und eine mehrstündige physiotherapeutisch begleitete Phase zur Einweisung in die Funktionen des Systems. Anschließend nutzten die Patienten diese Orthese mehrwöchig im Alltag. Nach dieser Nutzungszeit wurden bei einem zweiten Termin im Labor alle Tests mit dieser Orthese wiederholt. Aus organisatorischen Gründen konnte keine einheitliche Testzeit realisiert werden. Die jeweilige Länge der Testphase ist in Tabelle 1 angegeben.
Messtechnik und Datenverarbeitung
Die beim ebenen Gehen wirkenden Bodenreaktionskräfte wurden mit zwei Kraftmessplatten (Kistler 9287A, Kistler, Winterthur, Schweiz; Abtastrate 1080 Hz) gemessen. Die Erfassung der Kinematik der Bewegung erfolgte über die Aufzeichnung der Trajektorien von passiven Markern mit einem optoelektronischen Kamerasystem (Vicon 460, Vicon, Oxford, Großbritannien; Abtastrate 120 Hz). Hierzu wurden 14 Marker gemäß eines selbstentwickelten Modells verwendet 7 8.
Das Treppengehen wurde mit einer fünfstufigen Testtreppe realisiert. Dabei war die mittlere Stufe mit einer Messplatte verbunden, so dass bei diesem Stufenkontakt die Bodenreaktionskraft gemessen werden konnte. Die Testrampe (Neigungswinkel 10°) wies eine Länge von 5 m auf. Ein in der Mitte befindliches Element hatte mit der Messplatte Kontakt, so dass an dieser Stelle die Bodenreaktionskraft ebenfalls messbar war. Eine detaillierte Beschreibung der Testanordnung für das Treppen- und Schrägengehen ist in einer früheren Arbeit dargestellt 9.
Bei allen untersuchten Bewegungsabläufen wurden jeweils 8 bis 10 Doppelschrittzyklen vermessen. Aus den Markerdaten wurden die sagittalen Gelenkwinkel berechnet. Die Bestimmung der externen Gelenkmomente erfolgte mithilfe der kinematischen Daten und der Bodenreaktionskräfte. Bei sämtlichen Berechnungen kamen selbstgeschriebene Programme zur Anwendung (Vicon Body Language 3.5).
Für alle biomechanischen Parameter erfolgte die Bildung von individuellen gangzyklusnormierten Mittelwerten. Weiterhin wurden aus diesen Verläufen ausgezeichnete Maximalwerte extrahiert. Aufgrund der differenten funktionellen Möglichkeiten der Vorversorgungen und der relativ kleinen Patientenzahl wird beim Vergleich zwischen bisheriger Versorgung und C‑Brace-Orthese bezüglich der biomechanischen Parameter auf einen Vergleich von Gruppenmittelwerten mithilfe einer prüfenden Statistik verzichtet. Gleiches gilt aufgrund der differenten Bewegungsgeschwindigkeiten für den Vergleich der Parameter zwischen den Patienten und der Kontrollgruppe. Ein auf einer prüfenden Statistik beruhender Vergleich ist einzig hinsichtlich der Zeit-Distanz-Parameter sinnvoll und wurde mit dem Wilcoxon-Test durchgeführt.
Resultate
Ebenes Gehen
Im Mittel gingen die Patienten mit beiden Orthesenversorgungen mit einer beinahe identischen Geschwindigkeit – Vorversorgung 1.12 (Mittelwert) ± 0.10 (Standardabweichung) m/s; C‑Brace 1.11 ± 0.10 m/s – und signifikant langsamer als die Kontrollgruppe (1.45 ± 0.11 m/s, p < 0.01). Die Schrittlängen-Asymmetrie (Schrittlängen-Differenz zwischen betroffener und nichtbetroffener Seite) war ebenfalls für beide Situationen im Vergleich mit der Kontrollgruppe (natürliche Rechts-Links-Differenz 0.02 ± 0.01 m) in einer ähnlichen Größenordnung signifikant erhöht (Vorversorgung 0.06 ± 0.04 m; C‑Brace 0.05 ± 0.04 m; p < 0.01).
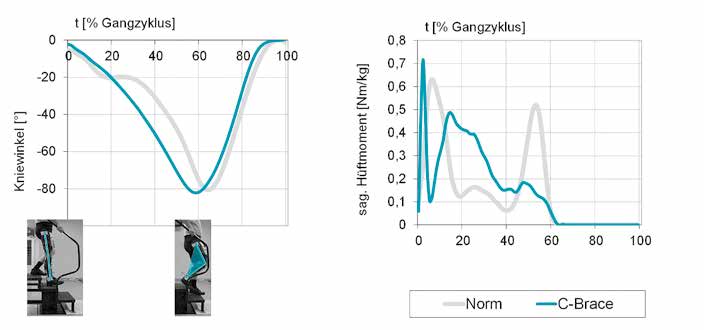
Aus den orthesenseitig gemessenen Kniewinkelverläufen folgt, dass die mit C‑Brace mögliche Knieflexion unter Belastung bei 5 von 7 orthetisch versorgten Extremitäten (4 von 6 Patienten) mit einem Mittelwert von 11.0 ± 5.6° genutzt wird. Der mittlere Schwungphasenflexionswinkel aller C‑Brace-Orthesen betrug 66.6 ± 8.5°. Bei den 4 SCO-Systemen wurde ein Mittelwert von 74.0 ± 6.4° gemessen. Zwei Einzelbeispiele der Kniewinkelvergleiche zwischen C‑Brace und Vorversorgung sind in Abbildung 2 dargestellt.
Das orthesenseitige Hüftmoment weist bei allen Patienten unabhängig von der orthetischen Versorgung während der Standphase kontinuierlich hohe Werte auf. Hinsichtlich des mittleren Maximalwertes des unmittelbar nach Standphasenbeginn wirkenden flektierenden Momentes werden mit der mikroprozessorgesteuerten Orthese im Vergleich mit SCO geringfügig höhere Werte gemessen (0.72 ± 0.12 vs. 0.62 ± 0.05 Nm/kg), im Vergleich mit der komplett gesperrten Orthese niedrigere (0.55 ± 0.15 vs. 0.68 ± 0.02 Nm/kg). Das unmittelbar vor Einleitung der Schwungphase messbare Extensionsmoment ist mit C‑Brace im Vergleich zur Vorversorgung einheitlich reduziert (-0.21 ± 0.31 vs. ‑0.36 ± 0.30 Nm/kg [SCO] und ‑0.41 ± 0.24 vs. ‑0.53 ± 0.25 Nm/ kg [KAFO gesperrt]).
Hinsichtlich der Gelenkmomente der großen Gelenke der kontralateralen unteren Extremität – Indikatoren für die Belastung des Bewegungsapparates 10 – sind bei den 5 unilateral betroffenen Patienten einheitlich nur geringfügige Differenzen im Vergleich zwischen C‑Brace-Orthese und SCO-System messbar. Deutliche Veränderungen ergeben sich bei der im Rahmen der Vorversorgung unilateral mit kompletter Sperre versorgten Patientin insbesondere für das Hüftgelenk. Der Maximalwert des nach Standphasenbeginn wirkenden Flexionsmomentes sinkt von einem extrem hohen Wert von 1.24 Nm/kg (komplette Sperre) auf 0.60 Nm/kg (C‑Brace), der des Extensionsmoments vor Schwungphasenbeginn von 0.49 Nm/kgauf 0.06 Nm/kg.
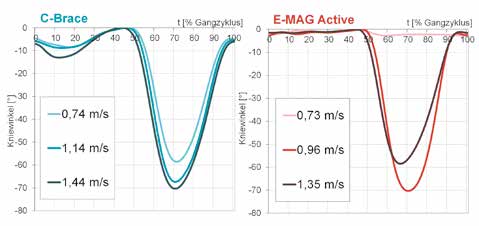
Die Kniewinkelverläufe der mit einer Patientin durchgeführten Variation der Gehgeschwindigkeiten sind in Abbildung 3 dokumentiert. Dabei geht die Patientin mit C‑Brace zwischen 0.74 und 1.44 m/s, wobei der maximale Schwungphasenflexionswinkel zwischen 59 und 70° variiert. Mit dem SCO-System (E‑MAG Active) kann die Patientin bei der selbstgewählten niedrigen Geschwindigkeit von 0.73 m/s die Schwungphasenfunktion nicht auslösen. Mittlere und hohe Geschwindigkeit betragen 0.96 und 1.35 m/s. In diesem Bereich variiert der Schwungphasenflexionswinkel zwischen 58 und 70°.
Rampe
Mit der Vorversorgung waren beide mit kompletter Sperre versorgte Patienten sowie zwei mit SCO-System in der Lage, auf der Rampe alternierend abwärts zu gehen. Hierzu waren jedoch aufgrund der anhaltenden Knieextension in der Standphase drastische kompensatorische Bewegungsmuster erforderlich; die Nutzung des Handlaufs war unumgänglich. Mit mikroprozessorgesteuerter Orthese konnten alle Patienten die Bewegung näherungsweise physiologisch durchführen, wobei ein Patient den Handlauf nutzte. Da sich konstruktionsbedingt nur mit der C‑Brace-Orthese ein natürliches Bewegungsmuster realisieren lässt, werden nur die mit dieser Orthese gemessenen biomechanischen Daten anhand des Vergleichs mit Normalwerten evaluiert.
Die Patienten gingen auf der Rampe mit einer im Vergleich zur Kontrollgruppe signifikant reduzierten mittleren Geschwindigkeit (0.89 ± 0.15 m/s vs. 1.40 ± 0.15 m/s, p < 0.01) und einer signifikant vergrößerten mittleren Asymmetrie der Schrittlängen (0.13 ± 0.09 m vs. 0.02 ± 0.01 m, p < 0.01).
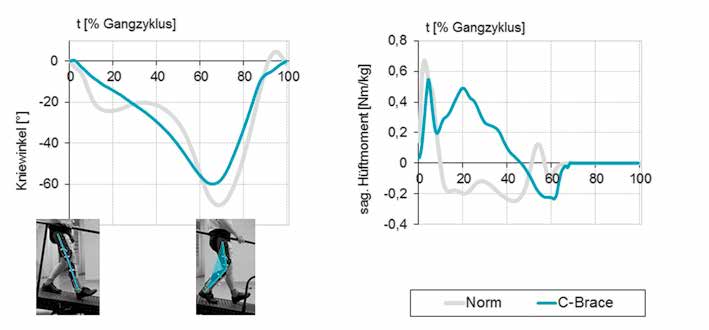
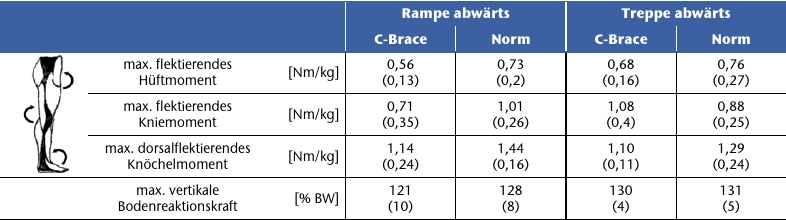
Der orthesenseitig gemessene Kniewinkelverlauf zeigt, dass mit dieser Orthese die Möglichkeit der Knieflexion unter Belastung von den Patienten genutzt wird. In allen Fällen wird gemäß dem Einzelbeispiel in Abbildung 4 (links) eine nach Standphasenbeginn einsetzende kontinuierliche Knieflexion gemessen. Der mittlere maximale Flexionswinkel ist im Vergleich mit dem der Normalgruppe um ca. 10° reduziert (64.6 ± 8.2° vs. 75.8 ± 4.8°). Hinsichtlich des orthesenseitigen Hüftmomentes wird ein ähnlicher Effekt wie beim ebenen Gehen gemessen. Abweichend vom Verlauf Gesunder ist während der Standphase für alle Patienten ein kontinuierlich hohes Moment nachweisbar (Abb. 4, rechts). Die auf der nichtbetroffenen Seite gemessenen Maximalwerte der vertikalen Bodenreaktionskraft und der externen Gelenkmomente, welche laut früheren Untersuchungen zuverlässige Indikatoren für die Belastung des Bewegungsapparates prothetischer Versorgungen beim Schrägen- und Rampengehen sind 11, zeigen durchgängig niedrigere Werte als die der Gesunden (Tab. 2).
Treppe
Mit der Vorversorgung konnte kein Patient die Treppe alternierend bewältigen. Mit der C‑Brace-Orthese war hierzu jeder Patient unter Zuhilfenahme des Handlaufs in der Lage. Die biomechanische Bewertung der mit dieser Orthese gemessenen Parameter erfolgt deshalb wieder anhand des Vergleichs mit der Kontrollgruppe.
Der mit C‑Brace ermittelte orthesenseitige Kniewinkelverlauf ähnelt unter qualitativem Aspekt unabhängig von der Vorversorgung dem Normalverlauf. Unmittelbar nach Standphasenbeginn setzt eine kontinuierliche Flexion unter Belastung bis zum Erreichen des maximalen Flexionswinkels ein. Exemplarisch ist hierzu in Abbildung 5 (links) wieder ein Patientenbeispiel angegeben. Der gemittelte maximale Knieflexionswinkel ist im Vergleich mit Gesunden um knapp 15° reduziert (70.5 ± 12.4° vs. 85.4 ± 6.2°). Bei der Analyse des orthesenseitig wirkenden Hüftmoments zeigt sich ein ähnlicher Effekt wie beim Schrägengang. Der unmittelbar nach Standphasenbeginn auftretende Maximalwert ist reduziert (0.68 ± 0.22 Nm/kg vs. 0.76 ± 0.27 Nm/kg), im weiteren Verlauf wirken jedoch, abweichend vom Bewegungsmuster Gesunder, insbesondere zwischen 15 und 40 % des Gangzyklus relativ hohe Momente. Dies ist erneut veranschaulicht anhand des Patientenbeispiels (Abb. 5, rechts). Die Maximalwerte biomechanischer Parameter der kontralateralen Extremität sind im Vergleich mit den Referenzwerten Gesunder reduziert, einzige Ausnahme ist hierbei das maximale Knieflexionsmoment (-1.08 vs. 0.88 Nm/kg, Tab. 2).
Diskussion
Mit der vorliegenden Untersuchung wird der aus der Technologie der C‑Brace-Orthese im Vergleich mit bisher bekannten KAFO-Versorgungen resultierende Patientennutzen anhand biomechanischer Messergebnisse dargestellt. Die im Wesentlichen aus der mikroprozessorgesteuerten Regulierung des Kniegelenk-Bewegungswiderstandes resultierenden neuen Funktionen sind bewegungsabhängig zu diskutieren.
Beim ebenen Gehen wird die mögliche Standphasenflexion mit dem neuen Orthesenprinzip von der Mehrzahl der Patienten genutzt und entspricht mit einem Mittelwert von 11° unter Berücksichtigung der im Vergleich mit Gesunden verminderten Gehgeschwindigkeit weitgehend dem physiologischen Wert 12. Die beiden Patienten, die diese Ortheseneigenschaft nicht nutzen, weisen als einzige der untersuchten Gruppe ein hohes Muskelkraftniveau der Hüftextensoren auf (Patienten 1 und 4, Tab. 1). Möglicherweise wurde dieses bei früheren Versorgungen zur Ausführung von notwendigen kompensatorischen Bewegungsmustern genutzt, die auch nach der mehrwöchigen Adaptationsphase an die C‑Brace-Orthese noch nicht korrigiert sind und somit die Einleitung der Standphasenflexion „blockieren”. Dieser Aspekt macht deutlich, dass aufgrund der neuartigen Orthesenfunktionen Neuversorgungen in jedem Falle mit physiotherapeutischen Maßnahmen begleitet werden sollten.
Die orthesenseitigen Hüftmomente, die im Vergleich mit dem Muster Gesunder im Verlauf der Standphase durchgängig hohe Werte annehmen, weisen auf notwendige Änderungen der Motorik hin, die unabhängig vom Orthesentyp sind. Demzufolge wird die Steuerung der jeweiligen Orthese hauptsächlich durch vermehrte und kompensatorische Aktivitäten im Bereich des Hüftgelenks oder des Rumpfes realisiert, was im Rahmen der kinetischen Parameter mithilfe des sagittalen Hüftmoments am anschaulichsten nachgewiesen werden kann.
Hinsichtlich der eindeutig zu identifizierenden Spitzenwerte weist nur das externe Extensionsmoment, wirkend unmittelbar gegen Ende der Standphase, bei komplett gesperrter KAFO einen deutlich erhöhten Wert auf. Dies ist interpretierbar mit einem unumgänglichen „Mehraufwand”, um die durchgängig versteifte Extremität in die Schwungphase zu bringen. Dieser Effekt wird im vorliegenden Fall durch die Versorgung mit der C‑Brace-Orthese deutlich reduziert. Frühere Untersuchungen zeigen einen ähnlichen Effekt für den Vergleich zwischen SCO und komplett gesperrter KAFO 13.
Die mit allen Orthesen gemessene kontralaterale Gelenkbelastung ist, verglichen mit den Normalwerten, wiederum nur für das Hüftgelenk bei komplett versteifter Orthese drastisch erhöht und stellt in diesem Fall eine kritische Mehrbelastung des Bewegungsapparats dar. Sowohl für die Vorversorgungen mit SCO als auch mit der neuen Orthese ist eine solche Mehrbelastung nicht feststellbar. Dies gilt zunächst streng nur für die untersuchte Gehgeschwindigkeit. Jedoch kann aus der in früheren Studien ermittelten Abhängigkeit der Höhe der Gelenkmomente von der Gehgeschwindigkeit 14 geschlussfolgert werden, dass sich bei den Patienten mit SCO und mikroprozessorgesteuerter Orthese auch bei einer um ca. 0.3 m/s erhöhten Geschwindigkeit, welche dann dem Wert der Normalgruppe entsprechen würde, keine spürbare Mehrbelastung des Bewegungsapparats einstellt. Im direkten Vergleich zwischen SCO und C‑Brace werden hinsichtlich der Gelenkbelastung ähnliche Werte gemessen. Dies ist als Hinweis interpretierbar, dass sich die Nutzung der im Vergleich mit SCO-Systemen um ca. 1 kg schwereren C‑Brace-Orthese nicht nachteilig auf den Bewegungsapparat auswirkt.
Die Einzeluntersuchung mit Variation der Gehgeschwindigkeit zeigt das grundsätzliche Potenzial der mikroprozessorgesteuerten Schwungphasensteuerung. Die mit 11° relativ geringe Veränderung des maximalen Flexionswinkels führt im untersuchten Geschwindigkeitsbereich zu einer Harmonie des Gangbildes, welche nur geringfügig von der Gangdynamik abhängig ist. Das Einzelbeispiel dokumentiert dabei die diesbezüglich grundsätzlichen Limitierungen der SCO-Systeme nicht zuletzt dadurch, dass der Patient bei der niedrigen Geschwindigkeit nicht in der Lage war, die freie Schwungphase überhaupt auszulösen.
Beim Abwärtsgehen auf Schrägen und Treppen zeigen sich die funktionellen Vorteile der neuen Orthese im Vergleich mit den Möglichkeiten bisher bekannter Orthesenkonzepte erwartungsgemäß am deutlichsten. Das auf der Schräge bei 4 Patienten auch mit der Vorversorgung beobachtete alternierende Gehen erfordert aufgrund der fehlenden Knieflexion unter Belastung extrem unnatürliche Bewegungsmuster, die zu einer deutlichen Überlastung des Bewegungsapparats, insbesondere im Knöchel- und Kniegelenk, führen müssen 15. Die gedämpfte Knieflexion unter Belastung der C‑Brace-Orthese hingegen ermöglicht eine näherungsweise natürliche Abwärtsbewegung des Körperschwerpunktes. Die kontralateral gemessenen Spitzenwerte der Gelenkmomente sind als verlässlicher Hinweis zu werten, dass der Bewegungsapparat beim Schrägengang mit C‑Brace weitgehend physiologisch belastet wird. Die ähnlich wie beim ebenen Gehen sowohl auf der Schräge als auch auf der Treppe gemessenen relativ hohen orthesenseitigen Hüftmomente weisen darauf hin, dass die neuromuskuläre Kontrolle der neuartigen Orthesenfunktion über kompensatorische Muskelaktivitäten im Bereich des Hüftgelenkes und des Rumpfes realisiert werden muss.
Beim alternierenden Treppengang ist zur Nutzung der Knieflexion unter Belastung konstruktiv bedingt eine spezifische Bewegungstechnik erforderlich. Dabei muss die Treppenkante im Mittelfußbereich kontaktiert werden; nachfolgend „rollt” der Fuß über die Treppenkante ab. Möglicherweise resultieren aus dieser notwendigen Bewegungstechnik teilweise höhere kontralaterale Gelenkmomente, die in geringem Ausmaß am Kniegelenk nachweisbar waren und einem aus der Beinprothetik bekannten Effekt entsprechen 16. Trotz dieses unvermeidbaren Kompensationsmechanismus ist im alternierenden Treppabgehen im Rahmen der hier getesteten Bewegungsabläufe der deutlichste funktionelle Zugewinn für die Patienten im Vergleich mit allen bisher bekannten Orthesenkonzepten zu sehen.
Bemerkenswert ist das hohe Vertrauen, mit welchem die Patienten die neuartige Orthesenfunktion der Knieflexion unter Belastung nutzen. Dies kann u. a. belegt werden durch die mehrheitliche Nichtnutzung des Handlaufes beim Schrägengang und spricht für ein im Vergleich mit allen bisher bekannten KAFO-Konzepten spürbar gesteigertes Sicherheitspotenzial der C‑Brace-Orthese. Dieses erhöhte Sicherheitspotenzial ist nicht nur beim Herabgehen von Treppen und Schrägen, sondern auch in anderen Alltagssituationen gegeben, da der Beugewiderstand generell zur Verfügung steht. Somit ist auch die Sturzgefahr, die beispielsweise durch Stolpern oder unebene Untergründe entsteht, reduziert.
Aufgrund der erhöhten Sicherheit der neuen Orthese ist zu erwarten, dass zukünftig auch Patienten versorgbar sein werden, für die die Nutzung eines SCO-Systems nicht möglich ist. Dies trifft beispielsweise auch für die beiden Patienten dieser Studie zu, deren Vorversorgung aus einer gesperrten KAFO bestand. Der Sicherheitsaspekt ist für Patienten mit Lähmungen oder Muskelschwächen an der unteren Extremität von hoher Bedeutung und bei der Diskussion der Funktionalität einer KAFO-Versorgung stets zu berücksichtigen.
Für die Autoren:
Dr. Thomas Schmalz
Otto Bock Healthcare,
Bereich Forschung/Biomechanik
Hermann-Rein-Straße 2a
37075 Göttingen
Thomas.Schmalz@ottobock.de
Begutachteter Beitrag/Reviewed paper
Schmalz T, Pröbsting E. C‑Brace-Orthesensystem und konventionelle Beinorthesen im Vergleich – Eine biomechanische Untersuchung. Orthopädie Technik, 2014; 65 (6): 54–61

![Beispiele des Kniewinkelvergleichs zwischen C-Brace und Vorversorgung mit Angabe des maximalen Stand- und Schwungphasenflexionswinkels (links: Patient mit Vorversorgung SCO [E-MAG Active], rechts: Patient mit Vorversorgung gesperrte KAFO).](https://360-ot.de/wp-content/uploads/2020/08/ot_14-06_2_Beispiele_Kniewinkelvergleich_schmalz.jpg)
- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Schmalz T, Blumentritt S, Drewitz H. Gangphasenabhängig entriegelnde versus gesperrte Beinorthesen – Biomechanische und metabolische Untersuchungen. Med Orth Tech, 2005; 125 (3): 67–74
- Mattson E, Broström L. The increase in energy cost of walking with an immobilized knee or an unstable ankle. Scan J Rehab Med, 1990; 22: 51–53
- Zacharias B, Kannenberg A. Clinical benefits of stance control orthosis systems: An analysis of the scientific literature. J Prosth Ortho, 2012; 24 (1): 2–7
- Pahl E, Auberger R. Ganzbeinorthese mit kontrollierter Schwung- und Standphase. Orthopädie Technik, 2013; 64 (1): 28–31
- Waldmann D. Biomechanik des Gehens auf verschiedenen Neigungen – eine kinetische, kinematische und elektromyografische Untersuchung. Göttingen: Magisterarbeit, Georg-August-Universität, 2006
- Pahl E, Auberger R. Ganzbeinorthese mit kontrollierter Schwung- und Standphase. Orthopädie Technik, 2013; 64 (1): 28–31
- Ludwigs E, Bellmann M, Schmalz T, Blumentritt S. Biomechanical differences between two exoprosthetic hip joint systems during level walking. Prosthet Orthot Int, 2010; 34: 449–460
- Nietert M. The compromise pivot axis of the knee joint. Aachen: Shaker, 2008
- Bellmann M, Schmalz T, Ludwigs E, Blumentritt S. Stair ascent with an innovative microprocessor controlled exoprosthetic knee joint. Biomech Tech, 2012; DOI 10.1515/bmt — 2011–0029
- Schmalz T, Blumentritt S, Drewitz H. Gangphasenabhängig entriegelnde versus gesperrte Beinorthesen – Biomechanische und metabolische Untersuchungen. Med Orth Tech, 2005; 125 (3): 67–74
- Schmalz T, Blumentritt S, Marx B. Biomechanical analysis of stair ambulation in lower limb amputees. Gait Posture, 2007; 25: 267–278
- Rose J, Gamble J. Human Walking. Philadelphia: Lippincott Williams & Wilkins, 2006
- Schmalz T, Blumentritt S, Drewitz H. Gangphasenabhängig entriegelnde versus gesperrte Beinorthesen – Biomechanische und metabolische Untersuchungen. Med Orth Tech, 2005; 125 (3): 67–74
- Lelas J, Merriman G, Riley P, Kerrigan D. Predicting peak kinematic and kinetic parameters from gait speed. Gait Posture, 2003; 17 (2): 106–112
- Pahl E, Auberger R. Ganzbeinorthese mit kontrollierter Schwung- und Standphase. Orthopädie Technik, 2013; 64 (1): 28–31
- Schmalz T, Blumentritt S, Marx B. Biomechanical analysis of stair ambulation in lower limb amputees. Gait Posture, 2007; 25: 267–278
