Einleitung
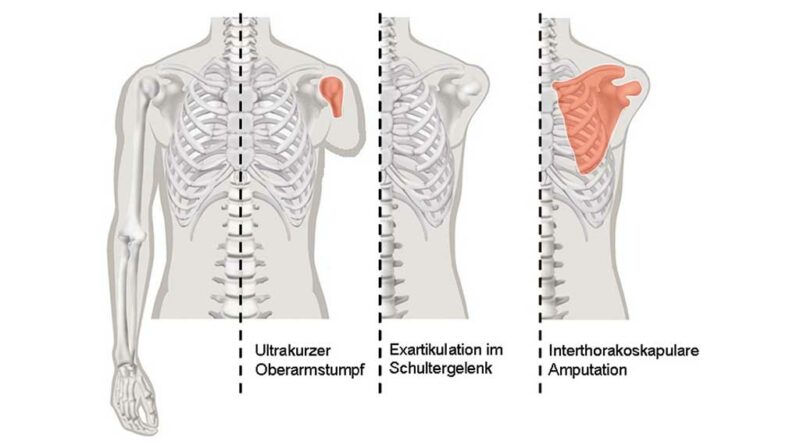
Es gibt verschiedene Absetzungen im Bereich des Schultergürtels, die das Tragen einer Schulterexartikulationsprothese nötig werden lassen. Typisch sind hier die Interthorakoskapulare Amputation, die Schulterexartikulation sowie die Amputation durch den proximalen Bereich des Oberarmknochens (Abb. 1), bei der ein ultrakurzer Stumpf erhalten bleibt 1.

Anders als bei den Amputierten der unteren Extremität, verzichten viele Patienten mit Absetzungen im Bereich des Schultergürtels auf eine Prothesenversorgung, obwohl es auch hier verschiedene Möglichkeiten gibt 2 3 4 5.
Wird sich dennoch für eine solche Versorgung entschieden, soll dadurch einerseits das kosmetische Erscheinungsbild verbessert und andererseits die Bewältigung von Alltagsaufgaben vereinfacht werden. Hierbei werden von den Amputierten meist Prothesen mit einem in der Sagittalebene frei schwingenden Prothesen-Schultergelenk bevorzugt. Die dadurch entstehende Pendelbewegung des Prothesenarms beim Gehen wird als angenehm empfunden 6 7 8, obwohl sie nachweislich nur sehr gering ausfällt 9. Hinzu kommt, dass der Armschwung der frei schwingenden Prothese nach einer Interthorakoskapularen Amputation oder nach einer Schulterexartikulation gar nicht und bei einem ultrakurzen Oberarmstumpf nur minimal muskulär unterstützt werden kann. Bei Nichtamputierten hingegen wird der Arm von der Schulter muskulär gesteuert und schwingt nicht wie ein gewöhnliches Pendel 10.
Die Reduzierung dieser natürlichen Schulterbewegung hat deutliche, nachgewiesene Konsequenzen: Das freie vertikale Moment wird erhöht 11, der metabolische Energieverbrauch steigt 12 und das Kniemoment in der sagittalen Ebene ist vergrößert 13.
Aus diesen Untersuchungen mit Nichtamputierten lässt sich folgern, dass auch bei Amputierten nach einer Absetzung im Bereich des Schultergürtels die Pendelbewegung der Prothese das Gangbild beeinflusst. Hierzu sind in der Literatur keine Ergebnisse zu finden.
Welchen Einfluss das Tragen einer Armprothese bei Ober- und Unterarmamputierten auf das Stehen hat, wurde hingegen bereits untersucht. Die Amputierten wiesen mit Prothese eine deutlich physiologischere Haltung auf als ohne das Tragen einer Prothese 14.
Mit der vorliegenden Studie werden bei Prothesenversorgungen der oberen Extremität erstmals die wichtigen Belastungsparameter der unteren Extremität beim Gehen und Stehen analysiert. Anhand biomechanischer Parameter wird objektiviert, inwieweit die einseitige prothetische Versorgung mit einer Schulterexartikulationsprothese Auswirkungen auf das Stehen und Gehen hat.
Methodik
Probanden
An dieser Untersuchung nahmen acht einseitig Amputierte mit Absetzungen im Bereich des Schultergürtels teil, wobei einer interthorakoskapular amputiert war, vier schulterexartikuliert und drei hatten einen ultrakurzen Oberarmstumpf (siehe Abb. 1). Sechs der Probanden haben den Arm traumatisch verloren. Bei den anderen waren ein Tumor bzw. eine Sepsis die Amputationsursache. Die Amputationen liegen 14 ± 9 Jahre zurück. Eine Prothese wird von 7 Probanden bereits seit 9 ± 9 Jahren benutzt, wohingegen einer der Probanden bei der Untersuchung zum ersten Mal eine Prothese getragen hat. Das durchschnittliche Alter betrug 44 ± 13 Jahre. Die durchschnittliche Größe lag bei 179 ± 8 cm und das Gewicht variierte um 97 ± 22 kg. Eine Kontrollgruppe aus sechs gesunden Probanden wurde ebenfalls analysiert (Alter: 27 ± 3, Größe: 176 ± 4 cm, Gewicht: 79 kg ± 15 kg).
Prothetische Versorgung
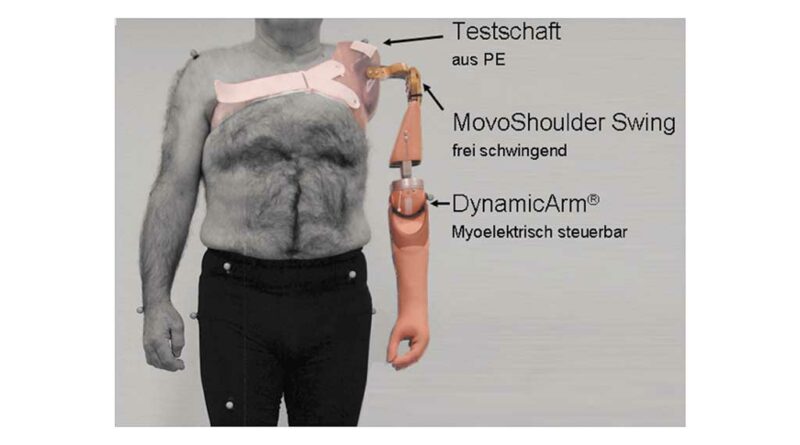
Für die Untersuchung wurde für jeden Probanden unter gleichen Bedingungen ein Testschaft erstellt. Die Prothese beinhaltete das Schultergelenk MovoShoulder Swing 15 16. Dieses Schultergelenk ermöglicht den Freischwung in der Sagittalebene. Über eine Schraube kann dieser Freischwung gebremst werden. Des Weiteren kann das Schultergelenk gedämpft in der Frontalebene schwingen. Als Ellbogengelenk wurde der DynamicArm® 17 gewählt. Durch die Funktion der bandagenlosen Steuerung ist ein solches Ellbogengelenk nach Herstellerangaben gerade für Menschen, die im Bereich des Schultergürtels amputiert oder exartikuliert sind, sehr gut geeignet.
Bei diesem Ellbogengelenk kann der Unterarm zudem durch die Automatic Forearm Balance-Beugehilfe (AFB) 18 19 reproduzierbar im Schwungverhalten eingestellt werden. Die AFB-Beugehilfe am DynamicArm® wurde einheitlich bei maximaler Spannung um fünf ganze Umdrehungen der Einstellschraube reduziert. Als Prothesenhand wurde eine System-Elektrohand ebenfalls von der Otto Bock HealthCare GmbH, Deutschland, eingesetzt (Abb. 2).
Statikanalyse
Die Statikanalyse erfolgte mit Hilfe des L.A.S.A.R. Postures 20. Hierbei wird der Kraftangriffspunkt der Bodenreaktionskraft ermittelt und ein Laser visualisiert die vertikale Bodenreaktionskraft. Mithilfe einer Bedieneinheit ist es beispielsweise möglich, den Laser zu verschieben und dadurch den Abstand zwischen der vertikalen Bodenreaktionskraft und den Gelenkachsen zu ermitteln. In der Prothetik der unteren Extremität hat sich dieses Verfahren zur Ermittlung und Optimierung des statischen Prothesenaufbaus etabliert 21.
Ganganalyse
Die biomechanische Analyse der Gangparameter wurde beim ebenen Gehen mit zwei Kraftmessplatten der Schweizer Firma Kistler und sechs optoelektronischen Kameras von der britischen Firma Vicon durchgeführt. Hierzu wurden beide Systeme von einem Datenerfassungsrechner gesteuert und über ein Lichtschrankensignal miteinander synchronisiert. Die optoelektronischen Kameras ermittelten mit einer Messfrequenz von 120 Hz die Koordinaten reflektierender Marker. Diese kennzeichneten relevante Stellen an den anatomischen Strukturen des Amputierten sowie an der Prothese. Die Markeranordnung erfolgte analog zu Ludwigs et al. 22. Mit den Kraftmessplatten wurden die Bodenreaktionskräfte für beide Seiten während eines Gangzyklus gemessen. Die Berechnung der in dieser Studie betrachteten extern wirkenden sagittalen Momente basierte auf den Bodenreaktionskräften und der Koordinaten der Gelenkachsen gemäß der in einer früheren Arbeit beschriebenen Methode 23.
Versuchsdurchführung
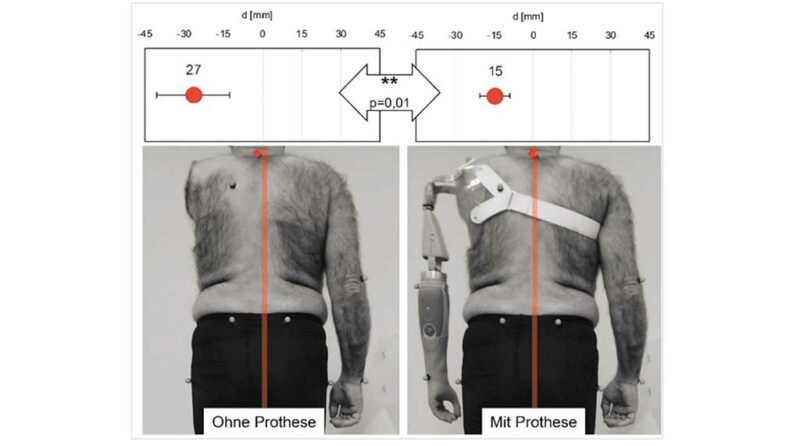
Zu Beginn der Untersuchung erfolgte an jedem Probanden die statische Analyse mit und ohne Prothese. Dazu wurden in der Sagittalebene die Abstände zwischen Belastungslinie und Gelenkachsen der oberen Sprung‑, Knie- und Hüftgelenke sowie in der Frontalebene zur Knöchel- und Kniemitte ermittelt. Zusätzlich wurde in der Frontalebene von dorsal der Abstand des 7. Halswirbels (C7) zur Belastungslinie gemessen (Abb. 3).
Anschließend absolvierten die Probanden eine Ganganalyse mit und ohne Prothese. Die Messreihenfolge erfolgte randomisiert. Die Probanden gingen zwecks Mittelwertbildung 9- bis 12-mal eine Strecke von ca. 12 m mit einer selbst gewählten Geschwindigkeit.
Für jeden Gangparameter wurde pro Proband aus den Einzelmessungen ein repräsentativer Mittelwert gebildet. Die in den Resultaten dargestellten Diagramme geben die Mittelwerte aller Probanden wieder. Die Mittelwerte markanter biomechanischer Parameter wurden mit Hilfe des Wilcoxon Tests auf signifikante Unterschiede getestet.
Ergebnisse
Statikanalyse
An der unteren Extremität konnte sowohl in der Frontal- als auch in der Sagittalebene kein signifikanter Unterschied zwischen dem Stehen mit und ohne Prothese festgestellt werden. Die Ergebnisse des Abstands des C7 zur Belastungslinie zeigten hingegen hoch signifikante Unterschiede (siehe Abb. 3). Der Abstand des C7 zur Lastlinie hatte einen durchschnittlichen Abstand von 27 mm, wenn die Prothese nicht getragen wird. Mit Prothese reduzierte sich der Abstand hoch signifikant auf 15 mm (p = 0,01).
Ganganalyse – Kinematik
Die frei gewählte Gehgeschwindigkeit betrug bei der Vergleichsgruppe durchschnittlich 1,44 m/s ± 0,05 m/s. Bei der Gruppe der Amputierten ohne Prothesen lag die Ganggeschwindigkeit bei 1,41 m/s ± 0,13 m/s, mit Prothese bei 1,40 m/s ± 0,11 m/s.
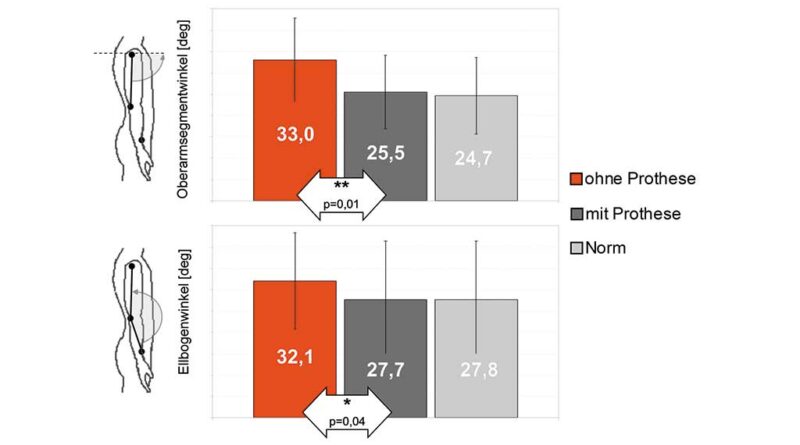
Die Untersuchungen zeigten, dass bei den Amputierten der kontralaterale Oberarm beim Gehen in der Sagittalebene sehr ausgeprägt schwingt (Abb. 4, oben). Die Amplitude beträgt ohne Prothese durchschnittlich 33,0°. Durch das Tragen der Prothese wird das Schwingen des gesunden Arms signifikant auf 25,5° reduziert (p = 0,01) und nähert sich dem der Vergleichsgruppe (24,7°) an. Die Bewegungsamplitude der Prothesenseite beträgt im Mittel 11,3°.
Wird das Ellbogengelenk in der Sagittalebene des gesunden Arms betrachtet, zeigen sich ähnliche Effekte (Abb. 4, unten). Die Amplitude des Ellbogens beträgt ohne Prothese 32,1°. Durch Tragen der Prothese wird der Ellbogenwinkel der kontralateralen Seite signifikant auf 27,7° reduziert (p = 0,04) und dem der Vergleichsgruppe (27,8°) angeglichen. Die Bewegungsamplitude im Ellbogengelenk beträgt im Mittel 12,1°.
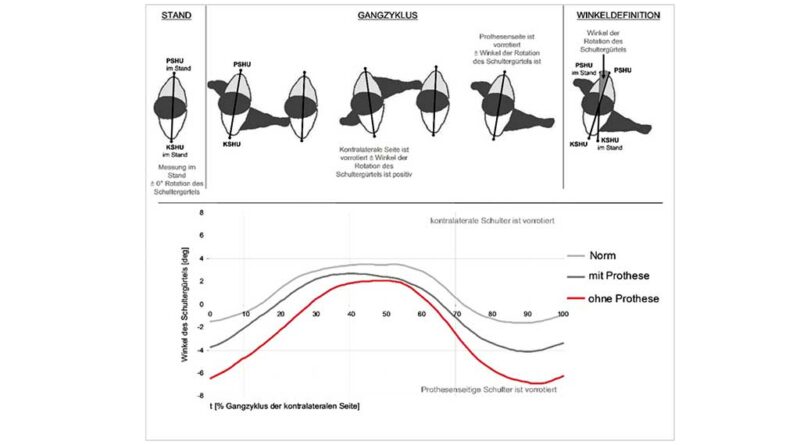
Bei der Darstellung der Ergebnisse für die Rotation des Schultergürtels wird der Gangzyklus der kontralateralen Seite betrachtet. Die prothesenseitige Schulter ist zu Beginn der kontralateralen Standphasen um 6,4° nach vorne rotiert. Mit Prothese wird dieser Winkel signifikant auf 3,7° reduziert (p = 0,04) und dem der Vergleichsgruppe (1,5°) angeglichen (Abb. 5).
Ganganalyse – Kinetik
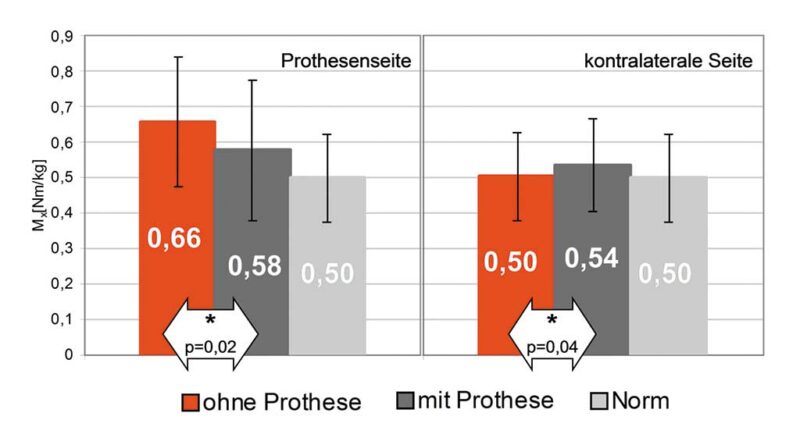
Die Gelenkbelastungsanalyse der unteren Extremität weist einzig versorgungsabhängige Effekte am Varus-/Valgusmoment des Kniegelenks auf. Ohne Prothese wird auf der ipsilateralen Seite ein maximales Varusmoment von 0,66 Nm/kg erreicht. Wird eine Prothese getragen, reduziert sich der Wert signifikant auf 0,58 Nm/kg (p = 0,02). Auf der kontralateralen Seite ist dieses Kniemoment deutlich geringer. Ohne Prothese beträgt es 0,50 Nm/kg und durch das Tragen der Schulterexartikulationsprothese wird es auf 0,54 Nm/kg erhöht. Bei der Kontrollgruppe wurde ein mittleres maximales Varusmoment von 0,50 Nm/kg gemessen (Abb. 6).
Diskussion
Einseitige Armamputationen verursachen unter anderem durch den Gewichtsverlust Asymmetrien der Körperhaltung 24 25. Dieser Gewichtsverlust liegt bei Schulterexartikulierten bei durchschnittlich ca. 4,2 kg 26. Durch ein handelsübliches Prothesensystem mit elektrisch betriebenen Ellbogen mit einem Gesamtgewicht von ca. 2,4 kg konnten in dieser Studie die Asymmetrie im Stand um durchschnittlich 45 % reduziert werden. Der Amputierte steht mit Prothese deutlich aufrechter mit einem sehr viel geringeren Rumpfüberhang zur nicht amputierten Seite.
Dieses Ergebnis entspricht Beobachtungen in einer Arbeit von Greitemann 27. Durch das Tragen einer Prothese steht der Amputierte somit nachgewiesenermaßen deutlich natürlicher, wodurch die Voraussetzungen verbessert werden, um Haltungsinsuffizienz und Rückenbeschwerden zu reduzieren 28.
Ein weiteres Ergebnis, das auch mit den Beobachtungen von Greitemann 29 übereinstimmt, ist die Rumpfrotation während des Gehens. Durch die fehlende Extremität ergibt sich eine Torsion des Rumpfes mit Vorrotation der amputationsseitigen Schulter 30. Der Effekt ist maximal zum Zeitpunkt des Beginns der kontralateralen Standphase. Da sich Arme und Beine gegenläufig bewegen, sollte zu diesem Zeitpunkt des Beginns der kontralateralen Standphase der Prothesenarm im Schultergelenk maximal flektiert sein. Diese natürliche, gegenläufige Bewegung minimiert die Rotationsamplitude des Rumpfes, die aus der Bewegung der Beine resultiert 31.
Wird keine Prothese getragen, fehlt dieses Gegengewicht. Dadurch entsteht die beobachtete deutliche Vorrotation der Schulter. Die vorliegende Untersuchung zeigt, dass diese um ein Drittel reduziert werden kann, wenn eine Prothese getragen wird. Sowohl der Gewichtsausgleich durch die Prothese als auch das Schwungverhalten derselben können als Ursache dieser Optimierung betrachtet werden.
Der Prothesenarm kann nicht – wie bei Nichtamputierten – durch die dazu verwendete Muskulatur gesteuert werden, sondern wird in seiner Bewegung durch Kompensationsbewegungen und Muskeln anderer Regionen unterstützt. Die dadurch entstehende Bewegung des Oberarmsegments unterschied sich sowohl in ihrem zeitlichen Ablauf als auch in ihrem Bewegungsausmaß im Vergleich zur Normgruppe und innerhalb der Gruppe der Amputierten stark.
Bei den Amputierten fielen zwei differente Bewegungsmuster des Oberarms auf, die beide zur Stabilisierung des Rumpfes beitragen: Eine Gruppe von Amputierten (n = 3) bewegte – wie auch die Normgruppe – den Oberarm gegenläufig zum ipsilateralen Bein. Die andere (n = 5) hielt den Prothesenarm zu Beginn der Standphase aktiv nach hinten, wodurch eine zusätzliche dynamische Stabilität erreicht wurde 32.
Die Ergebnisse machen deutlich, dass die dadurch entstehende Bewegung des Oberarmsegments auf der Prothesenseite im Gesamtmittel deutlich unter den gemessenen physiologischen Werten liegt. Dies ist auch bei Bierwirth 33 bestätigt.
Neben der Rumpfstabilisierung hat das Schwingen im Schultergelenk für den Amputierten noch eine weitere wichtige Bedeutung. Beim Gehen wirken Kräfte auf den Prothesenarm, die bei einem in der Sagittal- und Frontalebene frei beweglichen Gelenk eine Bewegung des Arms bewirken. Ist das Schultergelenk hingegen gesperrt, werden diese Kräfte über die Schulterschale auf den Stumpf übertragen und es kommt zu Druckspitzen, die vom Amputierten als unangenehm empfunden werden.
Ohne Prothese zeigt der Amputierte ein unnatürlich stark ausgeprägtes Schwungverhalten des gesunden Arms sowohl in der Schulter als auch im Ellbogen. Durch das Tragen der Prothese wird dieses Schwungverhalten reduziert und dem physiologischen Schwungbild angeglichen.
Es ist zu vermuten, dass zum einen die Amputierten Schwung mit dem gesunden Arm holen, um Gewicht nach vorne zu bringen, welches ihnen auf der amputierten Seite fehlt. Zum anderen kompensiert das ausgeprägte Schwingen des gesunden Arms die Auswirkungen der Schiefstellung des Körpers. Dadurch, dass mit Prothese das Gewicht des Prothesenarms bewegt werden muss und der Amputierte aufrechter läuft, reduziert sich der kompensatorische kontralaterale Armschwung.
Hinsichtlich der Gelenkbelastung der unteren Extremität ist ein deutlicher positiver Effekt durch die Prothese am Kniegelenk zu messen. In der Frontalebene ist beim Gehen ein Varusmoment im Knie mit Maximalwerten von 0,55 bis 0,60 Nm/kg physiologisch. Liegt der Wert über einen längeren Zeitraum über dieser physiologischen Grenze, sind die Bedingungen zur Entstehung einer Arthrose im Knie begünstigt. Dies wird ausführlich in der Arbeit von Goh 34 beschrieben.
Bei der hier untersuchten Gruppe von Amputierten mit Absetzungen im Bereich des Schultergürtels sind die Belastungen in der Frontalebene ohne Prothese auf beide Knie unsymmetrisch verteilt.
Markant ist dabei die unphysiologische Belastungserhöhung im ipsilateralen Knie. Durch das Tragen der Prothese wird nicht nur das Varusmoment im ipsilateralen Knie auf einen physiologischen Wert reduziert, es ergibt sich auch eine gleichmäßige Lastverteilung auf beide Kniegelenke.
Als Ursache ist einerseits das Gewicht des Prothesenarms denkbar. Der Amputierte steht durch den Gewichtsausgleich aufrechter. Somit verteilen sich die Belastungen gleichmäßiger auf den Körper, was eine Überbelastung des Kniegelenks reduziert.
Andererseits beschreibt Umberger, dass bei nicht amputierten Probanden mit reduziertem Armschwung das Varusmoment im Knie erhöht wird 35. Daraus lässt sich schlussfolgern, dass der Freischwung des Schultergelenks das Moment ebenfalls positiv beeinflusst. Dadurch wird weiterhin das Maximum des Varusmoments am ipsilateralen Knie reduziert. Dementsprechend hat sowohl der Gewichtsausgleich als auch der Armschwung einen entscheidenden Einfluss auf die Belastung im Knie.
Schlussfolgerung
Moderne Prothesensysteme bieten nach einer Absetzung im Bereich des Schultergürtels neben einer optisch akzeptablen Versorgung und einer funktionellen Unterstützung bei der Bewältigung von Alltagsaufgaben auch einen hohen biomechanischen Nutzen. Diese Studie bestätigt, dass durch das Tragen einer Prothese das Gehen und Stehen signifikant verbessert wird:
- Die Körperhaltung im Stehen ist optimiert.
- Kompensationsbewegungen beim Gehen wie die Verdrehung des Schultergürtels sowie die Ellbogen- und Schulterbewegung sind kontralateral minimiert.
- Die Belastung im Kniegelenk ist prothesenseitig reduziert.
Zusammenfassend zeigt sich eine reduzierte Belastung des Stütz- und Bewegungsapparates mit einer funktionellen Schulterexartikulationsprothese im Vergleich zur Situation ohne Prothese. Die Studie macht somit deutlich, wie nützlich, ja notwendig, eine moderne Armprothese ist.
Für die Autoren:
Dipl.-Ing. (FH) Eva Pröbsting
Otto Bock HealthCare
Forschung Biomechanik
Hermann-Rein-Straße 2a
37075 Göttingen
Eva.Ludwigs@ottobock.de
Begutachteter Beitrag/Reviewed paper
Pröbsting E, Bertels T, Schmalz T. Biomechanische Wirkung von Schulterexartikulationsprothesen. Orthopädie Technik, 2013; 64 (12): 38–44
- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Baumgartner R, Botta P. Amputation und Prothesenversorgung der oberen Extremität. Stuttgart: Enke, 1997
- Anderson C, Farnsworth T, Stevens G. Adaption of locking shoulder joints to increase functional range of motion for bilateral upper limb deficiencies. MEC ’99 Narrowing the Gap. Fredericton, NB, Canada: August 25–27, 1999
- Bierwirth W. Orthopädietechnische Konzepte zur myoelektrischen Armversorgung. Orthopädie Technik 2002; 53 (4): 291–297
- Kloss H. Myoelektrische Armprothesen: Welche Gründe behindern ihren Einsatz? Orthopädie Technik 2003; 54 (1): 16–20
- Walley Williams T ed. Mechanical changes and new control options improve the functions of the LTI-Collier shoulder joint. Fredericton, NB, Canada: Proceeding of the 2002 Myoelectric Controls Symposium 21–23 August 2002
- Bierwirth W. Orthopädietechnische Konzepte zur myoelektrischen Armversorgung. Orthopädie Technik 2002; 53 (4): 291–297
- Kloss H. Myoelektrische Armprothesen: Welche Gründe behindern ihren Einsatz? Orthopädie Technik 2003; 54 (1): 16–20
- Wutzler J. Zum Stand der myoelektrischen Versorgung der oberen Extremitäten. Orthopädie Technik 2000; 51 (11): 954–959
- Bierwirth W. Orthopädietechnische Konzepte zur myoelektrischen Armversorgung. Orthopädie Technik 2002; 53 (4): 291–297
- Elftman H. The function of the arms in walking. Human Biol 1939; 11: 529–535
- Li Y, Wang W, Crompton RH and Gunther MM. Free vertical moments and transverse forces in human walking and their role in relation to arm-swing. J Exp Biol 2001; 204: 47–58
- Umberger BR. Effects of suppressing arm swing on kinematics, kinetics and energetics of human walking. J Biomech 2008; 41: 2575–2580
- Umberger BR. Effects of suppressing arm swing on kinematics, kinetics and energetics of human walking. J Biomech 2008; 41: 2575–2580
- Greitemann B, Güth V, Baumgartner R. Asymmetrie der Haltung und der Rumpfmuskulatur nach einseitiger Armamputation – eine klinische, elektromyographische, haltungsanalytische und rasterphotogrammetrische Untersuchung. Zeitschrift für Orthopädie und ihre Grenzgebiete 1996; 134 (6): 498–510
- Bierwirth W. Orthopädietechnische Konzepte zur myoelektrischen Armversorgung. Orthopädie Technik 2002; 53 (4): 291–297
- Kloss H. Myoelektrische Armprothesen: Welche Gründe behindern ihren Einsatz? Orthopädie Technik 2003; 54 (1): 16–20
- Cutti AG. Performance evaluation of the new Otto Bock „DynamicArm“ by means of biomechanical modelling. Fredericton, NB, Canada: Proceeding of the 2005 Myoelectric Controls Symposium 17–19 August 2005
- Dietl H. Tendenzen in der Entwicklung von Prothesen für die obere Extremität.Orthopädie Technik 1997; 48 (2): 126–132
- Frühauf J. Der Ergoarm für die prothetische Versorgung im Oberarmbereich und seine Weiterentwicklung. Orthopädie Technik 2003; 54 (7): 502–506
- Blumentritt S. A new biomechanical method for determination of static prosthetic alignment. Prosthet Orthot Int 1997; 21: 107–13
- Kloss H. Myoelektrische Armprothesen: Welche Gründe behindern ihren Einsatz? Orthopädie Technik 2003; 54 (1): 16–20
- Ludwigs E, Bellmann M, Schmalz T, Blumentritt S. Biomechanical differences between two exoprosthetic hip joint systems during level walking. Prosthet Orthot Int 2010; 34 (4): 449–460
- Blumentritt S, Scherer HW, Wellershaus U. Biomechanisch-ganganalytische Bewertung von Prothesenfüßen. Med Orth Tech 1994; 114: 287–292
- Greitemann B, Güth V, Baumgartner R. Asymmetrie der Haltung und der Rumpfmuskulatur nach einseitiger Armamputation – eine klinische, elektromyographische, haltungsanalytische und rasterphotogrammetrische Untersuchung. Zeitschrift für Orthopädie und ihre Grenzgebiete 1996; 134 (6): 498–510
- Greitemann B. Amputation und Haltungsasymmetrie. Stuttgart: Enke, 1997
- Greitemann B. Amputation und Haltungsasymmetrie. Stuttgart: Enke, 1997
- Greitemann B, Güth V, Baumgartner R. Asymmetrie der Haltung und der Rumpfmuskulatur nach einseitiger Armamputation – eine klinische, elektromyographische, haltungsanalytische und rasterphotogrammetrische Untersuchung. Zeitschrift für Orthopädie und ihre Grenzgebiete 1996; 134 (6): 498–510
- Greitemann B. Amputation und Haltungsasymmetrie. Stuttgart: Enke, 1997
- Greitemann B, Güth V, Baumgartner R. Asymmetrie der Haltung und der Rumpfmuskulatur nach einseitiger Armamputation – eine klinische, elektromyographische, haltungsanalytische und rasterphotogrammetrische Untersuchung. Zeitschrift für Orthopädie und ihre Grenzgebiete 1996; 134 (6): 498–510
- Greitemann B, Güth V, Baumgartner R. Asymmetrie der Haltung und der Rumpfmuskulatur nach einseitiger Armamputation – eine klinische, elektromyographische, haltungsanalytische und rasterphotogrammetrische Untersuchung. Zeitschrift für Orthopädie und ihre Grenzgebiete 1996; 134 (6): 498–510
- Perry J. Ganganalyse – Norm und Pathologie des Gehens. München, Jena: Urban & Fischer, 2003
- Perry J. Ganganalyse – Norm und Pathologie des Gehens. München, Jena: Urban & Fischer, 2003
- Bierwirth W. Orthopädietechnische Konzepte zur myoelektrischen Armversorgung.Orthopädie Technik 2002; 53 (4): 291–297
- Goh J, Bose K, Khoo B. Gait analysis on patients with varus osteoarthritis of the knee. Clin Orthop 1993; 294: 223–231
- Umberger BR. Effects of suppressing arm swing on kinematics, kinetics and energetics of human walking. J Biomech 2008; 41: 2575–2580
