Einleitung
Das Labor für Bewegungsanalyse der Orthopädischen Universitätsklinik in Heidelberg wurde primär mit dem Ziel der Therapieplanung und Erfolgskontrolle von operativen Eingriffen bei Patienten mit neurologisch bedingten Gangstörungen etabliert. Jedoch wurden über viele Jahre hinweg auch Prothesennutzer unterschiedlicher Amputationsniveaus untersucht. Hintergrund waren Studien zu Prothesenpassteilen wie auch besondere klinische Einzelfälle. Dieser Datenpool bietet sich an, um Charakteristika des Gangbildes in Abhängigkeit vom Amputationsniveau abzuleiten.
Eine Amputation der unteren Extremität geht offensichtlich mit einer Änderung der Biomechanik des gesamten Bewegungsapparates einher 1. Prothesen können diese Einschränkungen, wie z. B. einen Verlust an Leistungsfähigkeit oder eine geänderte bzw. fehlende Sensorik und Propriozeption, bis dato nur unvollständig ausgleichen 2. Als Konsequenz weisen Prothesennutzer Seitenasymmetrien und Kompensationsmechanismen beim Gehen auf. Hierbei ist es nahe liegend, dass Patienten mit unterschiedlichen Amputationsniveaus typische und jeweilig charakteristische Gangbilder aufgrund von spezifischen Einschränkungen zeigen.
Verschiedene Arbeiten charakterisieren das Gangbild einer Amputationshöhe z. B. bei Unterschenkel- 3 oder Oberschenkelamputierten 4. Uns ist jedoch nur die Arbeit von Ludwigs und Kollegen 5 zu biomechanischen Charakteristika von unterschiedlichen Amputationsniveaus bekannt. Generell zeigt sich, dass bei höheren Amputationen die Abweichungen im Vergleich zum physiologischen Gangbild größer werden. Je höher das Amputationsniveau, desto mehr Gelenke sind von der Amputation betroffen. Weiterhin sind Anwender mit einem hohem Amputationsniveau mit kurzen funktionellen Hebeln, einer vollkommen geänderten Propriozeption und einem großen Verlust an Muskulatur 6 und Kraft 7 konfrontiert.
Neben diesen nutzerspezifischen Einflussfaktoren haben natürlich auch die technischen Eigenschaften der prothetischen Versorgung einen Einfluss auf das Gangbild. Die Wahl der Passteile 8, deren Aufbau 9 10 und das Schaftdesign sind wichtige Einflussfaktoren, um die individuell bestmögliche Versorgung zu erreichen. Auch physiotherapeutische Maßnahmen, wie z. B. eine Prothesengebrauchsschulung bzw. Gehschule, sind als Einflussfaktoren zu nennen. Diese spezifischen Einflüsse sollen hier jedoch vernachlässigt werden. Unabhängig von der orthopädietechnischen Versorgung der Nutzer und deren individuellen physischen Leistungsfähigkeit soll eine Aussage über das jeweilige charakteristische Gangmuster eines Amputationsniveaus getroffen werden, um grundlegende Probleme der jeweiligen Amputationshöhe beim Gehen aufzuzeigen.
Hierzu konnten retrospektiv die Daten von 85 Prothesennutzern unterschiedlicher Amputationsniveaus in diese Studie eingeschlossen werden. Es wurden die Mittelwerte der Kinematik (Gelenkwinkel) und der Raum-Zeit-Parameter (z. B. Gehgeschwindigkeit, Schrittlänge) betrachtet, um einen Eindruck über die prinzipiellen Gangcharakteristika zu erhalten.
Material und Methoden
Patienten- und Probandenkollektiv
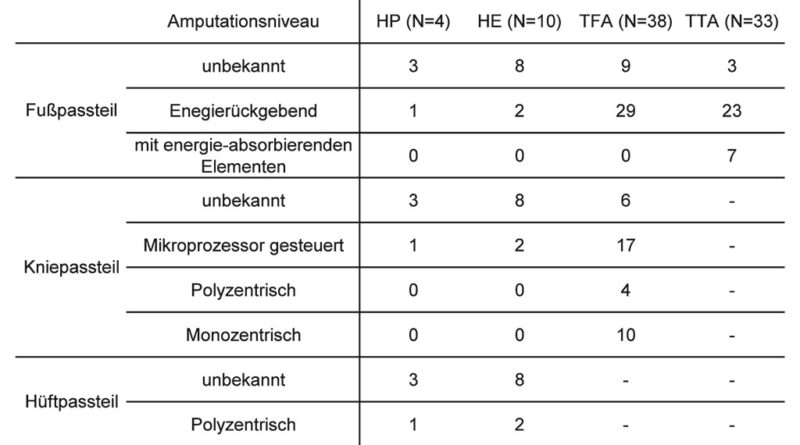
Die Daten von insgesamt 85 Prothesennutzern (16 weiblich; Größe 167 cm ± 7 cm; Gewicht 62 kg ± 17 kg; Alter 39 Jahre ± 12 Jahre / 69 männlich; Größe 177 cm ± 23 cm; Gewicht 80 kg ± 20 kg; Alter 42 Jahre ± 14 Jahre) mit unterschiedlichem unilateralen Amputationsniveau wurden retrospektiv in diese Studie eingeschlossen. Die Anwender konnten folgenden Gruppen zugeordnet werden: Hemipelvektomie (HP, 4 Probanden), Hüftexartikulation (HE, 10 Probanden), transfemorale Amputation (TFA, 38 Probanden) und transtibiale Amputation (TTA, 33 Probanden). Die verwendeten Prothesenpassteile der Anwender sind, soweit dokumentiert, in Tabelle 1 aufgelistet. Im Wesentlichen wurden Energie-rückgebende Füße eingesetzt. Es kamen unter anderem die Modelle C‑Walk© und Trias© der Firma Otto Bock und die Modelle Vari-Flex©, Vari-Flex© Modular und Talux© der Firma Össur zum Einsatz. Neben den Energie-rückgebenden Füßen wurden auch Füße mit Energie-absorbierenden Elementen eingesetzt, wie z. B. der Multiflex© (Endolite) oder der True Step© (College Park). Bei den Mikroprozessor-gesteuerten Kniegelenken kamen ausschließlich das C‑Leg© (Otto Bock) und das Rheo Knee© (Össur) zum Einsatz. In der Gruppe der polyzentrischen Gelenke wurden die Produkte 3A2000© (Streifeneder) und 3R60© (Otto Bock) eingesetzt. Bei den monozentrischen, nicht Mikroprozessor-gesteuerten Gelenken wurde ausschließlich das Gelenk XG-Mauch© (Össur) eingesetzt. Drei von 14 HP bzw. HE wurden mit einer Kombination aus einem C‑Leg© und einer Helix3D© Hüfte (beides Otto Bock) versorgt. Alle TTA verwendeten Kurzprothesen und alle TFA Vollkontaktschäfte. Diese waren jedoch mit unterschiedlichen Schaftdesigns und Suspensionstechniken ausgestattet. Die 3 HE-Versorgungen mit dem Helix3D©-Hüftgelenk wurden mit einem Carbonrahmenschaft mit Silikoninlet versorgt. Zu Vergleichszwecken wurden die Daten von 17 gesunden Probanden verwendet (NORM; 7 weiblich und 10 männlich; Größe 178 cm ± 7.9 cm; Gewicht 72 kg ± 13.8 kg; 28 Jahre ± 5,6 Jahre).
Ganganalyse
Alle Probanden durchliefen im Zeitraum von 1993 bis 2010 eine instrumentelle 3D-Ganganalyse für das Gehen in der Ebene. Hierfür wurde ein optoelektronisches Bewegungsanalysesystem der Firma Vicon (Oxford, Großbritannien) eingesetzt. Über auf der Haut bzw. der Prothese angebrachte Markerkugeln definieren dabei Segmente, die als Berechnungsgrundlage für die Gelenkwinkel dienen. Die Positionierung der Marker auf anatomischen Landmarken des Probanden und die Berechnungen der Kinematik (Gelenkwinkel) erfolgte gemäß dem Modell „Plugin-Gait“ (Vicon, Oxford, Großbritannien), welches auf dem biomechanischen Modell von Kadaba basiert 11 12 13.
Für diese Studie wurde die sagittale Kinematik des Beckens, des Hüftgelenks, des Kniegelenks und des oberen Sprunggelenks jeweils für die betroffene und nicht betroffene Seite betrachtet. Als Datenbasis dienen über mehrere Schritte jeweils gemittelte Gehdurchgänge jedes Prothesennutzers, die entsprechend der Amputationshöhe einer der vier Gruppen HP, HE, TFA und TTA zugeordnet wurden. Diese Mittelwerte für jeden einzelnen Probanden wurden über die Gruppen wiederum gemittelt, um das Gangbild für jede Untergruppe abzuleiten.
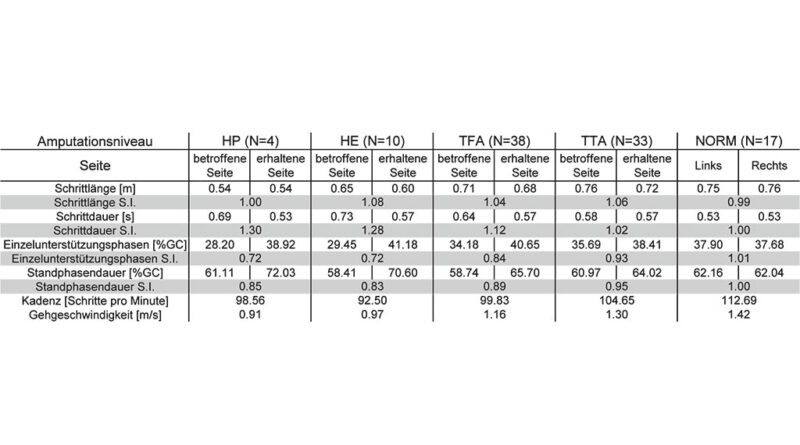
Neben der Kinematik wurden die Raum-Zeit-Parameter ermittelt. Diese schließen die Schrittlänge, Schrittdauer, Einzelunterstützungsdauer und die Standphasendauer der betroffenen und nicht betroffenen Seite ein. Ebenfalls wurden nicht seitenbezogene Raum-Zeit-Parameter wie Kadenz (Schritte pro Minute) und die Gehgeschwindigkeit erhoben. Weiter wurde ein Symmetrieindex (SI) der seitenbezogenen Gangparameter über das Verhältnis zwischen der betroffenen Seite und der nicht betroffenen Seite berechnet 14. Werte für den SI um 1 zeigen eine große Symmetrie an. Je weiter der SI von 1 entfernt ist, positiv wie auch negativ, desto größer ist die Asymmetrie für den entsprechenden Parameter zwischen der betroffenen und nicht betroffenen Seite.
Ergebnisse
Raum-Zeit-Parameter
Für die höheren Amputationsniveaus sind die seitenbezogenen Raum-Zeit-Parameter Kadenz und Gehgeschwindigkeit niedriger im Vergleich zu den niedrigeren Amputationsniveaus. Eine Ausnahme dieses Trends ist die Kadenz bei der Gruppe HP, die im Vergleich zu HE eine höhere Kadenz, also mehr Schritte pro Minute, aufweist.
Der Vergleich der seitenbezogenen Raum-Zeit-Parameter innerhalb der Gruppen zeigt bei allen Gruppen Asymmetrien in der Schrittdauer, der Einzelunterstützungsphase und auch in der Standphasendauer zwischen der nicht betroffenen und betroffenen Seite (Tab. 2). Es zeigt sich, dass bei höheren Amputationen diese Asymmetrien größer ausfallen. Mit einer Schrittlänge von 0,54 m für beide Seiten weist die Gruppe HP den geringsten Wert aller Gruppen auf. Hier zeigt sich jedoch eine symmetrische Schrittlänge.
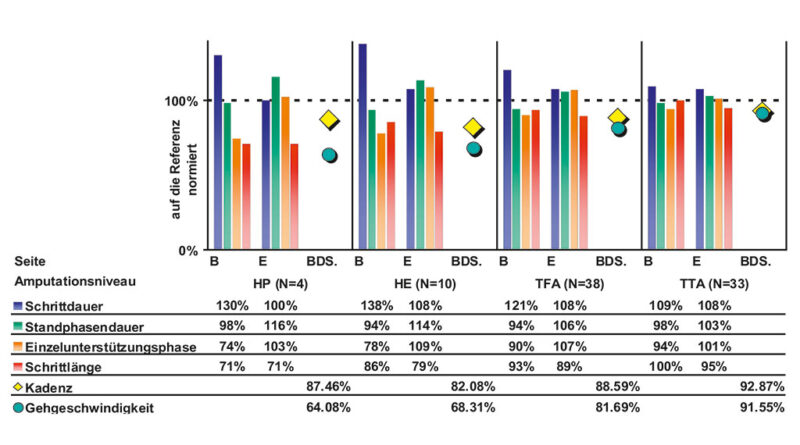
Weiter wurde ein Bezug zu physiologischen Raum-Zeit-Parametern hergestellt, indem die Ergebnisse auf die entsprechenden Parameter der Referenz normiert wurden. 100 % entsprechen also dem Ergebnis der Referenz (Abb. 1).
Kinematik
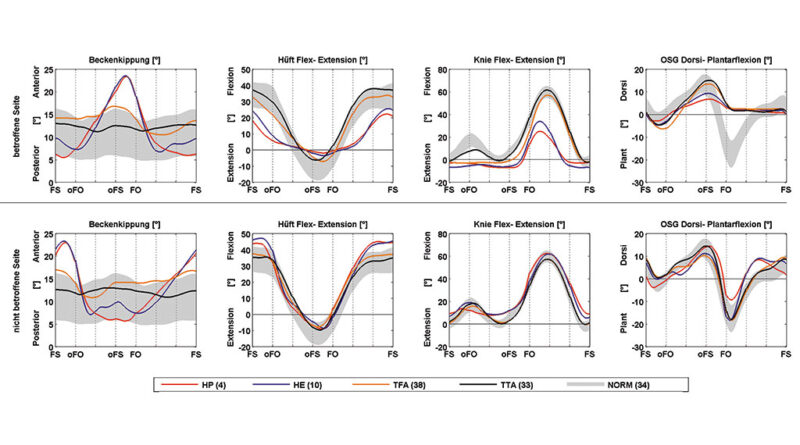
In der Darstellung der Kinematik zeigt sich grundsätzlich, dass bei höheren Amputationen größere Abweichungen zum Normkollektiv (graues Band = Mittelwert ± Standardabweichung), insbesondere der betroffenen Seite, auftreten (Abb. 2). Die sagittale Beckenbewegung verläuft bei der Gruppe TTA innerhalb des Bandes des Referenzkollektivs, bei TFA zeigt sich eine Tendenz zur Beckenvorkippung und die Gruppen HE und HP weisen ein deutlich vergrößertes Bewegungsausmaß auf (Abb. 2). Die Hüftkinematik der Gruppe TTA ist für beide Seiten am besten an die Werte der Referenz angenähert. Die Gruppe TFA zeigt Abweichungen der betroffenen Seite in der ersten Hälfte der Standphase in Form einer verminderten Hüftflexion (siehe Abb. 2). Die Gruppen HP und HE weisen eine deutlich veränderte Hüftkinematik für beide Seiten auf. Hier zeigt sich eine deutliche Reduktion des Bewegungsausmaßes für die betroffene Seite und ein vergrößertes Bewegungsausmaß für die erhaltene Seite im Vergleich zur Referenz. Das Bewegungsausmaß des prothetischen Kniegelenks in der Schwungphase sinkt mit zunehmender Höhe der Amputation (siehe Abb. 2).
Die Gruppe TTA ist durch eine verminderte Standphasenflexion des Kniegelenks der betroffenen Seite von ca. 10° während der Belastungsantwort gekennzeichnet. Die prothetischen Kniegelenke der Gruppen TFA, HE und HP zeigen keine bzw. eine stark reduzierte Standphasenflexion in der Belastungsantwort (siehe Abb. 2/ erstes Drittel der Standphase). Für die Kniegelenkskinematik der erhaltenen Seite weisen die Gruppen TTA und TFA im Mittel einen physiologischen Kurvenverlauf auf. Die Gruppen mit hohen Amputationen (HP und HE) haben eine erhöhte Kniegelenksflexion in der mittleren Standphase. Die Dorsalextension in der mittleren Standphase der erhaltenen Seite ist für die Gruppen TFA, HE und HP vermindert.
Diskussion
Raum-Zeit-Parameter
Bei Betrachtung der gemittelten Werte innerhalb der Gruppen wird deutlich, dass mit der Höhe der Amputation die Asymmetrie zwischen beiden Seiten ansteigt. Dies ist aufgrund der funktionellen Auswirkung der jeweiligen Amputation, bzw. wie viele der drei großen Gelenke (oberes Sprunggelenk, Knie- und Hüftgelenk) involviert sind, ein nahe liegendes Ergebnis und deutet auf eine verminderte Steuerungsfähigkeit der Prothese bei höheren Amputationen hin. Symmetrie wird im klinischen Kontext typischerweise mit einem normalen, nicht pathologischen Gangbild in Verbindung gebracht. Am Beispiel der Schrittlänge der HP zeigt sich, dass symmetrische seitenbezogene Raum-Zeit-Parameter nicht ausschließlich als Indikator für ein physiologisches Gangbild eingesetzt werden können, da identische pathologische Abweichungen beider Seiten ebenfalls symmetrisch sind. Als Beispiel hierfür ist das Gangbild nach bilateralen Amputationen zu nennen. So zeigen beispielsweise Unterschenkelamputierte eine symmetrische Schrittlänge und Standphasendauer, gleichzeitig aber eine verringerte Schrittlänge und Gehgeschwindigkeit im Vergleich zu einem Referenzkollektiv 15.
Weiter weist die Gruppe HP eine höhere Kadenz im Vergleich zum nächst niedrigeren Amputationsniveau (Gruppe HE) auf. Daran wird deutlich, dass die kürzere Schrittlänge der Gruppe HP anscheinend nicht ausreicht, um sich angemessen schnell fortzubewegen. In der Gruppe HP wird dies mit einer höheren Kadenz (Schrittfrequenz) ausgeglichen, um nicht zu viel an Gehgeschwindigkeit zu verlieren. Diese bleibt jedoch mit 0,91 m/s um rund ein Drittel langsamer als im Referenzkollektiv mit 1,42 m/s.
Kinematik
Die gemittelten Werte der Kinematik innerhalb der Gruppen zeigen eindrücklich, dass bei den hohen Amputationsniveaus (HP und HE) nur noch das Becken zur Steuerung der Prothese verbleibt. Das große unphysiologische Bewegungsausmaß der Beckenkippung in den Gruppen HP und HE und das reduzierte Bewegungsausmaß der Hüfte sind eindeutige Anzeichen hierfür. Bei der Bewertung der Beckenkippung ist eine Limitierung des biomechanischen Modells zu beachten. Hier wird nicht die Beckenbewegung, sondern die Bewegung des Beckenkorbs gegenüber dem Raum betrachtet, da die Marker zwangsweise auf den Korb geklebt werden. In den Gruppen HP und HE wird die Prothese mit einer großen Rückkippung des Beckenkorbes aufgesetzt (Abb. 2 / Beckenkippung beim FS). Innerhalb der gesamten Standphase wird der Beckenkorb allmählich nach vorne gekippt, um in der Schwungphase wieder zurück zu kippen.
Man erkennt also deutlich, dass die fehlende Beweglichkeit der prothetischen Hüfte mittels einer verstärkten Bewegung des Beckens ausgeglichen werden muss, um die betroffene Seite nach vorne zu bewegen. Modernere Versorgungskonzepte, wie z. B. das Helix3D© Hüftgelenk in Kombination mit dem C‑Leg© (Otto Bock, Duderstadt, Deutschland), gehen auf diesen Umstand ein und tragen dazu bei, das Bewegungsausmaß der Beckenkippung zu reduzieren 16.
Die Kniegelenkskinematik der betroffenen Seite ist in der Gruppe TTA am besten dem Referenzkollektiv angenähert. Hier zeigt sich im Wesentlichen eine um ca. 10° reduzierte Kniebeugung in der Belastungsantwort der Standphase. Dies deutet darauf hin, dass in der Gruppe TTA eine verminderte Kontrolle des Kniegelenks vorliegt, was z. B. auf ein Kraftdefizit des betroffenen Kniegelenks zurückgeführt werden kann 17 18. Die Kniegelenkskinematik in der Gruppe TFA zeigt, dass ein „Yielding“ bzw. „Bouncing“ des prothetischen Knies anscheinend nicht genutzt wird. Dies mag im Einzelfall anders sein, da eine Mittelung über die gesamte Gruppe Einzelergebnisse verschleiert. Weiter kommt hinzu, dass nicht alle Details der Versorgungen bekannt sind und zu den frühesten Messzeitpunkten z. B. Mikroprozessor-gesteuerte Gelenke noch gar nicht verfügbar waren.
Bei den Gruppen HP und HE ist die Kniegelenkskinematik der Prothese deutlich reduziert, was mit einer Reduktion der Schwungphasenfreiheit einher geht. Die vermehrte Knieflexion der erhaltenen Seite in der Einzelunterstützungsphase der Gruppen HP und HE ist schwer zu interpretieren. Zum einen könnte dieses Verhalten dazu dienen, den Bewegungsumfang der Beckenkippung zu vergrößern, da bei einem flektierten Kniegelenk der erhaltenen Seite der Beckenkorb in der Schwungphase der betroffenen Seite nominell weiter zurück gekippt werden kann. Dies wiederum könnte dazu dienen, die Schrittlänge der Prothese zu vergrößern. Weiter wäre es denkbar, dass die Steuerung des Körperschwerpunkts mittels der erhaltenen Hüfte in den Gruppen HP und HE aufgrund des Beckenkorbes eingeschränkt ist, und diese Steuerung zum Teil vom erhaltenen Kniegelenk übernommen wird.
Kompensationsmechanismen, wie z. B. ein frühes Ablösen der Ferse des erhaltenen Beins zur Sicherstellung der Schwungphasenfreiheit, treten bei höherer Amputation häufiger auf. Dies kann man in der OSG-Kinematik der erhaltenen Seite an der vermehrten Plantarflexion in der mittleren Standphase in den Gruppen TFA, HE und HP erkennen. Dieser Mechanismus führt zu einem unphysiologischen und vor allem unökonomischen Gangbild, da hierdurch der Körperschwerpunkt im Raum weitaus mehr vertikale Bewegung aufweist als beim physiologischen Gehen. Die vertikale Bewegung des Massenschwerpunkts beträgt beim physiologischen Gehen ca. 4,5 cm 19.
Zusammenfassung
Abschließend wird durch die Studie deutlich, dass in Abhängigkeit des Amputationsniveaus die Gehgeschwindigkeit und die Kadenz deutlich abnehmen. Die Kadenz wird zwar kompensatorisch in der Gruppe HP erhöht, entspricht jedoch nur ca. 2/3 der Kadenz des Referenzkollektives. Die Kinematik weicht insgesamt bei höheren Amputationen stärker vom physiologischen Ideal ab. Hier ist der Gang auch weitaus unökonomischer, da zunehmende Abweichungen der Kinematik direkt mit einer erhöhten Bewegung des Körperschwerpunktes zusammenhängen. Weiter zeigt sich, dass bei den höheren Amputationen verstärkt Kompensationsmuster der erhaltenen Seite auftreten und diese somit mehr leisten muss.
Im Kontext der Rehabilitation können die hier präsentierten Daten zur Orientierung und zur Bewertung der zu erwartenden Versorgungsergebnisse dienen. Sie spiegeln nicht den Einzelfall wider, sondern zeigen prinzipielle Problematiken beim Gehen der unterschiedlichen Amputationsniveaus auf.
Neben der instrumentellen Ganganalyse bestehen noch weitere Möglichkeiten der systematischen funktionellen Dokumentation von Prothesenanwendern. Eine geschickte Auswahl an funktionellen Tests, welche im Kontext mit Prothesennutzern bereits etabliert sind, wie z. B. dem Zwei- Minuten-Gehtest 20 oder auch Fragebögen, in denen verschiedene Alltagsaktivitäten abgefragt werden 21 22, können helfen, den klinischen Eindruck zu quantifizieren. International, wie auch in Heidelberg, werden derzeit Protokolle zu einer standardisierten Dokumentation der Funktion von Anwendern mit ihrer prothetischen Versorgung etabliert. Ein landesweites Register in dieser Form ist in Schweden bereits gegründet und wurde von Bengt Söderberg auf der Orthopädie + Reha-Technik 2012 in Leipzig vorgestellt 23 24. Ein Register in dieser Form ist von hohem Wert, da es helfen kann, Versorgungs‑, Therapie- und Rehabilitationskonzepte zu überprüfen und weiter zu optimieren.
Für die Autoren:
Dipl.-Ing. (FH) Daniel Heitzmann
Wissenschaftlicher Mitarbeiter
Bereiche Bewegungsanalytik
Stiftung Orthopädische
Universitätsklinik Heidelberg
Schlierbacher Landstr. 200a
69118 Heidelberg
daniel.heitzmann@med.uni-heidelberg.de
Begutachteter Beitrag/Reviewed paper
Heitzmann DWW, Block J, Braatz F, Wolf SI, Alimusaj M. Gangmuster von Amputierten in Abhängigkeit vom Amputationsniveau. Orthopädie Technik, 2013; 64 (3): 14–19
- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Ludwigs E. et al. Biomechanische Charakteristiken des Gangbildes verschiedener Amputationsniveaus., Posterbeitrag auf der 6. Jahrestagung der Deutschen Gesellschaft für Biomechanik, Münster, 2009
- Baumgartner R, Botta P. Amputation und Versorgung der Unteren Extremität. Vol. 2., Stuttgart: Ferdinand Enke Verlag, 1995
- Winter DA, Sienko SE. Biomechanics of below-knee amputee gait. J Biomech., 1988; 21 (5): 361–367
- Jaegers SM, Arendzen JH, de Jongh HJ. Prosthetic gait of unilateral transfemoral amputees: a kinematic study. Arch Phys Med Rehabil, 1995; 76 (8): 736–43
- Ludwigs E. et al. Biomechanische Charakteristiken des Gangbildes verschiedener Amputationsniveaus., Posterbeitrag auf der 6. Jahrestagung der Deutschen Gesellschaft für Biomechanik, Münster, 2009
- Schmalz T, Blumentritt S, Reimers CD. Selective thigh muscle atrophy in trans-tibial amputees: an ultrasonographic study. Arch Orthop Trauma Surg, 2001; 121 (6): 307–12
- Heitzmann D et al. Können Gangabweichungen von transfemoral und transtibial amputierten Patienten auf Kraftdefizite der betroffenen Seite zurückgeführt werden? Orthopädie Technik. 2011; 62 (5): 321–332
- Bellmann M, Schmalz T, Blumentritt S. Comparative biomechanical analysis of current microprocessor-controlled prosthetic knee joints. Arch Phys Med Rehabil, 2010; 91 (4): 644–52
- Blumentritt S. A new biomechanical method for determination of static prosthetic alignment. Prosthet Orthot Int, 1997; 21 (2): 107–13
- Blumentritt S, Schmalz T, Jarasch R. Die Bedeutung des statischen Prothesenaufbaus für das Stehen und Gehen des Unterschenkelamputierten.Orthopäde, 2001; 30 (3): 161–8
- Kadaba MP et al. Repeatability of kinematic, kinetic, and electromyographic data in normal adult gait. J Orthop Res., 1989; 7 (6): 849–860
- Kadaba MP, Ramakrishnan HK, Wootten ME. Measurement of lower extremity kinematics during level walking. J Orthop Res.,1990; 8 (3): 383–392
- Ramakrishnan HK, Kadaba MP. On the estimation of joint kinematics during gait. J Biomech. 1991; 24 (10): 969–977
- Sadeghi H et al. Symmetry and limb dominance in able-bodied gait: a review. Gait Posture, 2000; 12 (1): 34–45
- Su PF et al. Gait characteristics of persons with bilateral transtibial amputations. J Rehabil Res Dev, 2007; 44 (4): 491–501
- Ludwigs E et al. Biomechanical differences between two exoprosthetic hip joint systems during level walking. Prosthet Orthot Int, 2010; 34 (4): 449–60
- Heitzmann D et al. Strength deficits in trans-tibial amputees. Gait&Posture, 2009; 30, Supplement 2 (0): 4
- Schmalz T, Blumentritt S, Reimers CD. Selective thigh muscle atrophy in trans-tibial amputees: an ultrasonographic study.Arch Orthop Trauma Surg, 2001; 121 (6): 307–12
- Saunders JB, Inman VT, Eberhart HD. The major determinants in normal and pathological gait. J Bone Joint Surg Am, 1953; 35‑A (3): 543–58
- Morice A, Smithies T. Two‑, six‑, and 12-minute walking test in respiratory disease. Br Med J (Clin Res Ed), 1982; 285 (6337): 295
- Franchignoni F et al. Reliability, validity, and responsiveness of the locomotor capabilities index in adults with lower-limb amputation undergoing prosthetic training. Arch Phys Med Rehabil, 2004; 85 (5): 743–8
- Legro MW et al. Prosthesis evaluation questionnaire for persons with lower limb amputations: assessing prosthesis-related quality of life. Arch Phys Med Rehabil, 1998; 79 (8): 931–938
- Amputations- och protesregistret för nedre extremiteten. [zitiert am 08.01.2013]; unter: http://www.swedeamp.com
- Soederberg B. Expectations on lower limb prosthetics, Keynote lecture auf der Orthopädie + Reha-Technik. Leipzig, 2012
