Einleitung
Die prothetische Versorgung der oberen Extremität von Kindern und Jugendlichen ist eine ganz besondere Herausforderung. Neben dem Problem der wachstumsbedingten kontinuierlichen Anpassung der Schaftsysteme sind auch geeignete Passteile oft nicht verfügbar. Dies gilt insbesondere für die myoelektrische Armund Handprothetik. Handprothesen sind für die Altersklassen 1,5 bis 13 Jahre und dann in realistischen Größenproportionen zur kontralateralen Hand erst wieder für junge Erwachsene verfügbar. Für ca. 8- bis 16-jährige Kinder und Jugendliche ist die prothetische Versorgung mit einer myoelektrisch gesteuerten Hand in der Vergangenheit besonders schwierig gewesen, weil für diese Altersklasse Prothesen mit den eigentlich benötigten Griffweiten und Greifgeschwindigkeiten nicht in ausreichendem Maße zur Verfügung standen. Hinzu kam, dass die Designs der Prothesen unter kosmetischen Gesichtspunkten nicht zufriedenstellend waren.

Dabei ist die prothetische Versorgung gerade in dieser Entwicklungsphase besonders wichtig für die Heranwachsenden, denn in dieser Zeit erlangen sie viel Selbstständigkeit und bilden intensiv ihre motorischen Fähigkeiten aus. In dieser Phase formt sich das Schreiben, Malen, Spielen und Sporttreiben, d. h. das kreative Arbeiten in all seinen Ausprägungen, und hier wird maßgeblich das Entwicklungspotenzial der Kinder für ihren weiteren Lebensweg festgelegt. Fehlt in dieser Phase eine Extremität, wird die sich in vollem Gange befindliche körperliche Entwicklung erheblich beeinflusst. Insbesondere führt eine asymmetrische Körperhaltung zu einer einseitigen Belastung der Wirbelsäule. Aber auch die Biomechanik des Ganges wird stark beeinflusst, da ein Masseungleichgewicht des Oberkörpers durch das Fehlen einer Hand oder eines Arms durch Kompensationsbewegungen auch zu einer zusätzlichen Belastung von Sehnen, Bändern und Gelenken im Fuß-Bein-Bereich beim Gehen und Laufen führt.
Mit der „VINCENTyoung” steht nun ein Prothesensystem zur Verfügung, das, je nach Körpergröße, für Kinder und Jugendliche im Alter von 8 bis 13 Jahren geeignet ist und eine Lösung für die technischen und funktionalen Defizite bietet (Abb. 1). Vom Funktionsumfang her zählt sie zu den multiartikulierenden Händen. Das seit Mitte 2014 über qualifizierte Fachbetriebe verfügbare System eröffnet damit erstmals auch einen Zugang der bionisch inspirierten modernen Handversorgung zur Kinder- und Jugendhandprothetik.
Im Folgenden werden die wesentlichen Funktionsmerkmale der neuen Prothese vorgestellt. Hinsichtlich der Vorteile eines multiartikulierenden Systems sowie der Kompatibilität zu bestehenden Schaftsystemen und EMG-Steuerungen nimmt die „VINCENTyoung” eine besondere Stellung innerhalb der Versorgungslösungen für Kinder und jugendliche Prothesenträger ein.
Multiartikulierende Hände
In den vergangenen zehn Jahren hat die Handprothetik einen deutlichen technologischen Sprung vollzogen. Es ist ein anhaltender Trend in Richtung multiartikulierender Hände festzustellen, d. h. ein Trend zu Handprothesen, die über unabhängig voneinander bewegliche Finger- und Daumengelenke verfügen und somit unterschiedliche Griffarten gestatten. Auch den ästhetischen Aspekten wird im Zuge dieser Entwicklung mehr Aufmerksamkeit gewidmet, sodass zunehmend auch das Design als Funktionsmerkmal wahrgenommen wird.
Technisch war es bisher nicht möglich, elektronisch gesteuerte hochbewegliche Handprothesen so klein und leistungsfähig zu bauen, dass sie den Anforderungen von Kindern und Jugendlichen bezüglich Anatomie, Gewicht, Funktionalität und Robustheit gerecht werden konnten. Die meisten der bisher verfügbaren bionischen Hände hatten die Größe einer erwachsenen Männerhand. Für Kinder sind solche Prothesen sowohl in Bezug auf Handgröße als auch auf Handgewicht in hohem Maße dysfunktional. Die „VINCENTevolution2” bildete in diesem Feld mit einem Gewicht von 425 g und ihrer geringen Größe eine Ausnahme, sie war bereits für Jugendliche und junge Erwachsene im Alter von 14 bis 18 Jahren geeignet.
Übertroffen wird dieses Modell nun aber von der „VINCENTyoung”. Mit ihr steht die nach Angaben des Verfassers derzeit kleinste und leistungsfähigste bionische Handprothese für die Kinder- und Jugendversorgung zur Verfügung.
Merkmale der neuen Handprothese
Anatomie und Ästhetik
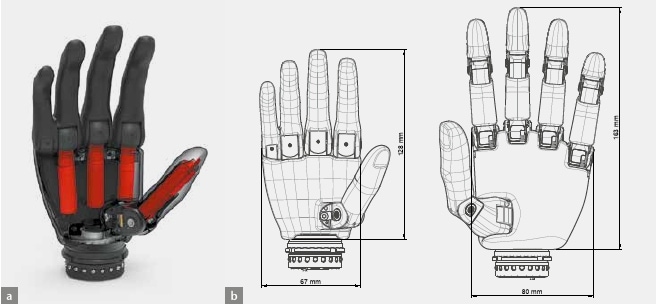
Die neue Prothese ist mit dem Ziel konzipiert worden, die Funktionalität einer multiartikulierenden Hand mit den anatomischen und ästhetischen Anforderungen an eine Kinder- und Jugendprothese zu verbinden. Gewicht, Größe und Form sollten daher dem natürlichen Vorbild entsprechen. Im Vergleich zur „VINCENTevolution2” wurde bei dem neuen Modell die Handlänge von 163 auf 128 mm und die Breite der Mittelhand von 80 auf 67 mm reduziert (Abb. 2a und 2b). Das anatomisch angenäherte Design des Vorgängers zeichnet sich aus durch eine flache und ausgeprägte Mittelhand und eine abgerundete Formensprache, die durch eine vollständige Ummantelung der Prothese mit elastischen Polyurethan-Formelementen unterschiedlicher Elastizität erreicht wird. Dieses Design konnte auch bei der neuen Hand erfolgreich umgesetzt werden. Die multiartikulierende Kinder- und Jugendhand hat inklusive einer Handgelenk-Verschlussautomatik ein Gewicht von ca. 285 g.
Kinematik und anatomische Bezugsgrößen
Die kompakte und biomechanisch optimierte Hand aus einer hochfesten Aluminium-Magnesium-Legierung und einer nachgiebig weichen Hülle aus Polyurethan verfügt über vier DC-Kleinstmotoren, die jeweils über ein Miniatur-Planetengetriebe die vier Bewegungsachsen in der Hand unabhängig voneinander und bidirektional aktiv antreiben. Der Daumen verfügt darüber hinaus über eine fünfte, jedoch passiv bewegte Achse. Indem die Gelenke der Kinderhandprothese sowohl mit Motorkraft geschlossen als auch geöffnet werden, imitiert sie etwa 8 der 33 Muskeln und 5 der 22 Gelenke einer menschlichen Hand.
Im Vergleich zu einer nicht-multiartikulierenden Handprothese weist die neue Prothese trotz ihrer vier Motoren ein relativ geringes Gewicht bei erhöhter Funktionalität auf.
Bezogen auf die Anatomie der menschlichen Hand werden in der Prothese jeweils die Metacarpophalangealgelenke (MCP) von Zeigefinger (2), Mittelfinger (3), Ringfinger (4) und Kleinfinger (5) bewegt, wobei die Finger 4 und 5 miteinander im MCP gekoppelt sind und einen gemeinsamen Antrieb haben. Die Fingerglieder Phalanx proximalis, Phalanx media und Phalanx distalis sind in der Prothese in einer leichten Flexion von ca. 30 Grad in den Gelenken starr miteinander verbunden. Der Metacarpalbereich der Hand ist starr ausgeführt und endet in Anlehnung an sein natürliches Vorbild direkt auf Höhe der Handwurzel. Beim Daumen sind Phalanx distalis, Phalanx proximalis sowie Metacarpalia starr verbunden. In diesem Bereich sitzt der Daumenantrieb, der den Daumen in der Basis der Metacarpalia elektrisch im Oppositionssinne gegen die Langfinger bewegt. Die Position des motorisierten und über eine Feder vorgespannten Daumens wird über einen Sensor erfasst und geregelt. Auf diese Weise wird eine punktgenaue Berührung zwischen der Daumen- und Zeigefingerpapille im Pinzetten- bzw. Präzisionsgriff sichergestellt. Zur Abduktion wird der Daumen passiv in einer weiteren Bewegungsachse rotiert. Die für eine manuelle Daumenbewegung aufzubringende Kraft ist über ein Federpaket individuell einstellbar.
Auf diese Weise sind der Zeigefinger, der Mittelfinger, der Ringfinger zusammen mit dem Kleinfinger und der Daumen einzeln beweglich. Im Gegensatz zur „VINCENTevolution2” befinden sich die Motoren der „VINCENTyoung” nicht in den Fingern, sondern in der Mittelhand, mit Ausnahme des aktiv angetriebenen Daumens. Diese Anordnung gestattet eine schlanke Gestaltung der Langfinger und der Mittelhand und damit eine besonders weite Annäherung an die Anatomie der menschlichen Hand.
Öffnungsweite
Ein besonderes Augenmerk wurde auf eine große Öffnungsweite zwischen den Langfingern und dem Daumen gelegt: Sie beträgt zwischen den Papillen von Zeigefinger und Daumen 110 mm. Ein zylindrischer Gegenstand, z. B. ein Glas oder eine Tasse, kann daher bis zu einem Durchmesser von ca. 80 mm sicher gehalten werden (Abb. 3a–c). Mit dieser großen Griffweite unterscheidet sich dieses Handsystem deutlich von alternativen Kinder- und Jugendhandsystemen. Die in der Abbildung 3b gegriffene weiße Tasse hat einen Durchmesser von ca. 75 mm.
Handgelenkoptionen
Das Prothesensystem verfügt über unterschiedliche Handgelenkoptionen. Zunächst kann grundsätzlich zwischen einem starren und einem flexiblen Übergang zwischen Hand und Handgelenksanbindung gewählt werden (Abb. 4a–c).
Darüber hinaus kann entweder eine standardisierte Verschlussautomatik oder ein spezieller Transcarpalverschluss mit geringer Aufbauhöhe eingesetzt werden. Beide Varianten bieten eine rasterfreie manuelle 355-Grad-Rotation im Handgelenk, deren Friktion stufenlos einstellbar ist. Beide bieten auch eine einfache Möglichkeit, die Hand vom Prothesenschaft zu trennen, wobei bei der Transcarpalvariante ein handelsüblicher Inbusschlüssel erforderlich ist. Für diese Variante steht für die Schaftanbindung wahlweise eine Eingusshülse oder ein Drahtgeflechtring zur Verfügung, letztere Ausführungsform ist die mit 20 mm Aufbauhöhe kürzeste Variante (Abb. 5a und 5b).
Tastsinn
Um einen Gegenstand sicher zu greifen und seine Eigenschaften zu erfassen, setzen Menschen ohne Einschränkung neben den Augen insbesondere den Tastsinn ihrer Hände ein. Einem Prothesenträger fehlt jedoch diese wichtige Berührungsinformation, die von den Fingerspitzen stammt. Zusätzlich ist auch der Tastsinn seines Armstumpfs durch den Prothesenschaft stark eingeschränkt. Will man in einer Prothese einen Tastsinn realisieren, muss man für die sensorische Rückmeldung und Weiterleitung der Tastinformation von den künstlichen Fingerspitzen an den Prothesenträger eine Lösung finden. Hier besteht das Problem, dass unabhängig von der Art des Transfers sowohl die Rezeptoren in der Haut als auch unser Gehirn sich auf diesen „fremden Reiz” einstellen und mit der Zeit diese „Störung” unterdrücken. Es tritt eine Gewöhnung an den Reiz ein, die Rückmeldung kann dann nicht mehr differenziert wahrgenommen werden.
Für die „VINCENTevolution2” wurde erstmals ein Force-Feedbacksystem entwickelt, das diesen Gewöhnungseffekt deutlich minimiert. Die Gewöhnung ist besonders stark, wenn gleichbleibende Reize auf die Rezeptoren der Haut wirken. Deshalb wurde für die Prothese ein künstlicher Tastsinn entwickelt, der darauf beruht, dass lediglich Informationen über Änderungen von Kraft oder Berührung an den Prothesenträger übermittelt werden. Dabei wird die Kraftinformation in eine Anzahl gut zu unterscheidender Stufen unterteilt. Ebenso erfolgt eine Einteilung in die Kategorien „erste Berührung”, „zunehmende Kraft” und „abnehmende Kraft”. Bei Erreichen einer neuen Stufe wird eine Rückmeldung in Form einer Vibration mit Einzelimpulsen an den Träger gegeben – die Anzahl der Impulse richtet sich dabei nach der Höhe der erreichten Greifkraftstufe. Nur bei einem Stufenwechsel wird ein Signal über die Art der Änderung gegeben, dazwischen erfolgt keinerlei Rückmeldung bzw. Vibration. Die gemessene Griffkraft an der Fingerspitze wird auf diese Weise in ein Vibrationsfeedback übersetzt.
Auch die „VINCENTyoung” ist serienmäßig mit diesem vibrotaktilen Tastsinn ausgestattet. Sie ist damit weltweit die erste Kinder- und Jugendhandprothese, die diese Technik einsetzt.
Gestaltungsprozess der Kinder- und Jugendhand
Der Designprozess der Kinderhand startete mit einem Gipsabdruck der rechten Hand eines zwölfjährigen Jungen, für dessen linken Unterarm eine prothetische Versorgung geplant war. Das Gipsmodell wurde zunächst mit einem hochauflösenden 3‑D-Scanner digitalisiert. Im CAD-System wurden die Daten dann gespiegelt und als Vorgabe für Form und Größe der zu entwickelnden Handprothese eingesetzt. Die Prothese wurde daraufhin mit allen Funktionsmerkmalen virtuell konstruiert, sodass ihre Kinematik und mechanische Belastung simuliert werden konnten. Auch der Designprozess bis hin zur farblichen Beschichtung, bis zur Wahl der Oberflächenstruktur aller sichtbaren Baugruppen und bis zur realitätsnahen Darstellung wurde im CAD-Prozess simuliert.
Die Abbildung 6a – f zeigt zunächst die reale Hand oben links, dann den Hand-Scan, das Spiegeln des Scans und die darauffolgende Konstruktion der bionischen Hand bis hin zum virtuellen, fotorealistischen Ergebnis der mechatronischen Konstruktion am PC. Unten rechts ist bereits die fertig produzierte, einsatzbereite Handprothese abgebildet.
Erfahrungsberichte
Bevor die „VINCENTyoung” in der aktuellen Serienausführung angeboten werden konnte, wurde die Prothese an der Zielgruppe umfangreich erprobt (Abb. 7), wie das folgende Beispiel einer der ersten Probeversorgungen zeigt. Beim Probanden handelte es sich um einen zwölf Jahre alten Jungen, der linksseitig bereits mit einer myoelektrischen Kinderhand versorgt war. Die Motivation zu einem Prothesenwechsel bestand hier vor allem darin, dass sich das Prothesensystem bezüglich Form und Größe auffällig von seiner vorhandenen Hand unterschied und dass die Griffweite mit ca. 60 mm zu klein bemessen war, um z. B. eine Flasche oder eine Tasse zu greifen.
Für den Probanden wurde eine individuelle Prothese erstellt, nachdem der Gipsabdruck seiner Hand digitalisiert worden war. Alle Verkleidungselemente der Hand wurden hier aus einem PU-Schaum in einem 3D-Sinterprozess gefertigt. Die Hand entsprach bereits kinematisch und bezüglich der Prothesensteuerung dem späteren Serienmodell der „VINCENTyoung”. Die Handgröße des Serienmodells wurde jedoch etwas verkleinert.
Die Erprobungen der Prothese erfolgten mehrere Monate, die gewonnenen Erfahrungen führten zu einer Optimierung von Service und Programmierung der Hand. Insbesondere das differenzierte Greifen mit unterschiedlichen Griffarten sowie das Feinmanipulieren als Führungs- oder Assistenzhand wurden vom Prothesenträger als deutliche Verbesserung gegenüber anderen Handvarianten herausgestellt (Abb. 8).
Steuerung
Die Steuerung der Hand erfolgt über zwei analoge Eingänge. Diese können wahlweise mit ein bis zwei EMG-Elektroden belegt werden oder alternativ mit Touchpads. Das Öffnen und Schließen der Hand erfolgt wie üblich über die beiden Steuersignale oder alternierend bei der Verwendung nur eines Sensors.
Das Umschalten in andere Griffarten (Abb. 9) erfolgt über das zeitlich abgestimmte Öffnen und Schließen sowie mittels eines Umschaltsignals, das frei gewählt werden kann. Für das Umschaltsignal kann eine oder mehrere der vorgegebenen Varianten gewählt werden: ein einzelnes kurzes Signal, ein Doppelsignal oder eine einzelne Ko-Kontraktion. Die Einzel- und Doppelsignale werden nur auf dem Öffnen-Signaleingang ausgewertet. Wird kein Umschaltsignal ausgewählt, steht auch nur eine reduzierte Griffauswahl zur Verfügung.
Ruheposition
Nach dem Einschalten der Hand und aus der flachen Handstellung heraus fahren die Langfinger und der Daumen in eine leicht geschlossene, natürlich wirkende Ruheposition.
Dreipunktgriff und Lateralgriff
Aus der Ruheposition heraus bewegen sich proportional zum Öffnen- und zum Schließen-Signal alle Finger gleichmäßig auf und zu. Je nach manuell gewählter Daumengrundstellung kann aus dieser Position heraus ein Dreipunktgriff oder ein Lateralgriff erreicht werden.
Pinzettengriff
Aus der Ruheposition heraus können durch das gewählte Umschaltsignal der Mittelfinger und die miteinander gekoppelten Ring- und Kleinfinger auf der aktuellen Position ab- und angeschaltet werden. Sind diese Finger abgeschaltet, bewegen sich nunmehr nur der Zeigefinger und der Daumen gegeneinander. Je nach manuell gewählter Grundstellung des Daumens wird hierdurch ein Pinzettengriff oder ein Lateralgriff erreicht.
Indexstellung
Um direkt die typische Zeigefingerstellung zu erreichen, genügt es, die Hand zu öffnen und sie im Anschluss für eine voreingestellte Zeit weiter offen zu halten. Mittel‑, Ring- und Kleinfinger sowie der Daumen schließen sich automatisch, der Zeigefinger bleibt ausgestreckt. Der Zeigefinger kann aus dieser Position durch Öffnen und Schließen frei positioniert werden.
Das Zurückspringen der Finger in die Grundposition der flachen Hand erfolgt durch ein langes Öffnen-Signal; die Hand öffnet dann vollständig.
Tabletthand
Der Tablettgriff unterscheidet sich von der Indexstellung nur dadurch, dass Mittel‑, Ring- und Kleinfinger sowie der Daumen im vollständig geöffneten Zustand verbleiben, der Indexfinger ist wiederum frei positionierbar. Dieser Griff wird aus der Grundposition heraus durch einmaliges Betätigen des Umschaltsignals erreicht.
Cupholder
Von dem Tablettgriff kann durch Betätigung des Umschaltsignals zu dem sogenannten Cupholder-Griff gewechselt werden. Dabei schließen Ring- und kleiner Finger, die miteinander gekoppelt sind, vollständig und verbleiben an dieser Position, ohne auf Steuerungssignale zu reagieren. Alle anderen Finger und der Daumen können gemeinsam bewegt werden. Dieser Griff ermöglicht das Abstellen z. B. einer Tasse oder eines Glases auf dem verriegelten Ringfinger und das gleichzeitige aktive Greifen von Zeigefinger, Mittelfinger und Daumen um den Gegenstand. Bei diesem Griff führen kleine unwillkürliche oder versehentliche Öffnen-Signale nicht dazu, dass ein gegriffenes Glas versehentlich aus der Hand rutscht.
Einstellung der Prothesenparameter
Die nutzerspezifischen Einstellungen der Prothese erfolgen über ein grafisches Nutzer-Interface. Für diese Zwecke wurden verschiedene Applikationen für mobile Endgeräte entwickelt, über deren kabellose Bluetooth-Schnittstelle alle Funktionsparameter der „VINCENTyoung” individuell auf den Prothesenträger abgestimmt werden können (Abb. 10).
Über einen Tablet-PC oder ein Smartphone können alle relevanten Sensordaten der Prothesensteuerung am Bildschirm in grafischer Form verfolgt werden. Zudem können Prothesenparameter neu eingestellt und auf dem Mikrocontroller der Hand gespeichert werden. Ergänzt wird die Software durch Trainingsprogramme zum Erlernen und Verbessern des Umgangs mit den Steuerungssignalen der Prothese.
Nutzen für den Prothesenträger
Durch eine konsequente Leichtbauweise, Miniaturisierung und die technologische Neuentwicklung aller mechatronischen Komponenten vom Antriebskonzept bis zur Steuerungselektronik ist es mit der neuen multiartikulierenden Kinder- und Jugendhand nach Auffassung des Autors gelungen, Funktionalität, Biomechanik und anatomisches Design auf hohem Niveau miteinander zu verschmelzen. Der junge Prothesennutzer selbst erfährt von dem technischen Aufwand, der hinter dieser Prothese steckt, nur wenig, denn je besser seine Prothese wird, desto weniger wird er sie als ein technisches Hilfsmittel wahrnehmen und umso mehr als ein Teil von ihm.
Die neue Prothese ist verfügbar für alle Spezialisten der oberen Extremität, die an einem Zertifizierungsseminar für diese Technik erfolgreich teilgenommen haben. Kurse hierzu werden der Fachwelt individuell und auf Anfrage angeboten.
Der Autor:
Dr. Dipl.-Ing. Stefan Schulz
Vincent Systems GmbH
76135 Karlsruhe
info@vincentsystems.de
Begutachteter Beitrag/reviewed paper
Schulz S. Eine bionische Handprothese für Kinder und Jugendliche. Orthopädie Technik, 2015; 66 (5): 30–35














- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
