Einleitung und Motivation
Als direkte biomechanische Schnittstelle zwischen Mensch und technischem System bestimmt der Prothesenschaft sowohl die Kontrolle und Stabilität der gesamten Beinprothese als auch deren Komfort und hat somit unmittelbaren Einfluss auf den Erfolg einer Rehabilitation. Die Herstellung individueller Schaftsysteme ist nach wie vor handwerklich geprägt; die Qualität der Passform ist wesentlich von der Expertise und den Erfahrungen des Orthopädietechnikers, der subjektiven Patientenruckmeldung über die Passform sowie der Geduld beider Akteure abhängig. Zur Qualitätssicherung wären quantitative Kenngrößen hilfreich. Eine potenziell relevante Kenngröße ist die Relativbewegung zwischen Beinstumpf und Prothesenschaft in dynamischen Gangszenarien.
In der Literatur lassen sich unterschiedliche Ansätze zur Erfassung der Relativbewegung zwischen Beinstumpf und Prothesenschaft ermitteln; am häufigsten werden folgende Verfahren zur Messung und Rekonstruktion der auftretenden Relativbewegung verwendet:
- Motion Capture 1 2 3 4,
- andere optische Mittel 5 6,
- induktive Sensoren 7 8 9 10 sowie
- Vakuumdruckschwankungen aktiver Unterdrucksysteme 11 12.
Diese Ansätze sind jedoch mit verschiedenen Nachteilen behaftet: So können beispielsweise Vakuumdruckschwankungen nicht zur Bewertung der Relativbewegung an bestimmten Stellen innerhalb der Schnittstelle verwendet werden; darüber hinaus gibt es trotz der Vielzahl unterschiedlicher Messansätze nur wenige Studien, die gangzyklusabhängige Daten der Relativbewegung während des Gehens erheben 13 14 15 16.
Als Alternative wurde ein Messkonzept entwickelt, das auf einem zweidimensionalen optischen Bewegungssensor basiert. Im Gegensatz zu den oben beschriebenen Ansätzen, die den derzeitigen Stand der Technik markieren, ermöglicht das neue System sowohl die lokale Auflösung der Relativbewegung als auch deren Erfassung im zweidimensionalen Raum 17. Anhand experimenteller Untersuchungen am Prüfstand konnte der relative Messfehler mit 0,5 ± 1,78 % quantifiziert werden 18. Des Weiteren wurde die biomechanische Plausibilität der Messdaten im Rahmen einer Pilotstudie aufgezeigt 19. Mit Hilfe dieses Messsystems wurden im Rahmen einer Doktorarbeit verschiedene Fragestellungen datenbasiert untersucht und diskutiert 20.
In diesem Artikel wird die Detektierbarkeit des Einflusses zweier verschiedener Prothesenfußpassteile auf die dynamische Stumpf-Schaft-Interaktion bei unterschiedlichen dynamischen Gangszenarien anhand von Relativbewegungsmessungen erörtert.
Methode
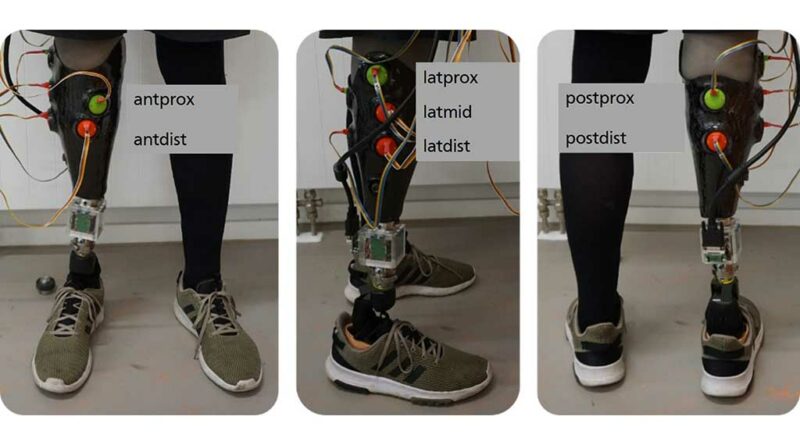
Die Studie wird mit einem aktiven Mann (Mobilitätsgrad 4, 69 Jahre, 1,88 m, 90 kg) mit Unterschenkelamputation auf der rechten Seite (Stumpflänge 11 cm, amputiert seit 5 Jahren) durchgeführt. Für die Messungen trägt der Proband einen speziell angefertigten Messschaft (Sanitätshaus Klein, Dieburg, Deutschland) auf Basis eines hydrostatischen Gipsabdrucks („Symphonie Aqua System VC“, Romedis GmbH, Neubeuern, Deutschland) mit Pin-Lock-Mechanismus und einen Silikon-Liner des Typs „RelaxTM Locking“ der Größe 30 (Össur hf, Reykjavik, Island). Der Messaufbau ist in Abbildung 1 dargestellt. Die Relativbewegung wird demnach an sieben Stellen gemessen, die auf der anterioren (2 Stellen), der lateralen (3) und der posterioren (2) Seite des Schaftes verteilt sind. Zusätzlich werden die Belastungen am distalen Ende des Schaftes mittels Kraftmessdose 21 erfasst und der aktuelle Schaftkomfort per Socket Fit Comfort Score (SFCS; numerische Ratingskala von 0 = „maximal unbequem“ bis 10 = „maximal bequem“) 22 abgefragt.
Der durchgeführte Messablauf umfasst dynamische Gangszenarien aus dem Alltag, die sich in Bezug auf ihre biomechanischen Belastungen unterscheiden. Wie in Abbildung 2 dargestellt, werden in folgender Reihenfolge sieben unterschiedliche Gangszenarien messtechnisch erfasst:
- Geradeausgehen in der Ebene,
- Gehen im Kreis (1 m Radius) mit Prothesenbein innen bzw. außen,
- Treppensteigen (hinab und hinauf) sowie
- Rampenlauf (hinab und hinauf).
Für weitere Details sei an dieser Stelle auf Kapitel 5.3 in Publikation 23 verwiesen. Dieser Messablauf wird mit zwei unterschiedlichen Fußpassteilen (beide Össur hf, Reykjavik, Island) absolviert (siehe Abb. 4 unten rechts):
- „Pro-Flex XC“ und
- „Pro-Flex Pivot“.
Laut Hersteller ist das Modell „Pro-Flex XC“ besonders für hohe Belastungsgrade aktiver Prothesenträgerinnen und ‑träger 24 ausgelegt, während sich der Prothesenfuß „Pro-Flex Pivot“ durch einen großen Bewegungsumfang und eine erhöhte Energierückgabe auszeichnet 25.
Die Kraftkomponente in proximodistaler (pd) Richtung wird zur Identifizierung einzelner Gangzyklen (GC) verwendet. Je nach Gangszenario ist eine Datenbasis von 16 GC für die statistische Analyse anwendbar. Eine sensorinhärente Bewertung der Messqualität (SQUAL-Wert) wird verwendet, um Messdaten unzureichender Qualität auszuschließen; entsprechende Daten der SQUAL-Werte unter 30 (weniger als ein Drittel des Normalwertes) werden ausgeschlossen.
Zur Identifikation von Unterschieden in den Relativbewegungsdaten durch das Tragen der beiden verschiedenen Prothesenfußkomponenten wird eine mathematische Vergleichsgröße Pvgl,ij eingeführt. Mit deren Hilfe lässt sich die Ähnlichkeit zweier Sensorsignale i und j bewerten. Diese ist definiert als der Quotient zwischen der Distanz der Mittelwerte beider Signale X und der Summe der Standardabweichungen s zu jedem Zeitpunkt des Gangzyklus. Die entsprechende Formel lautet:
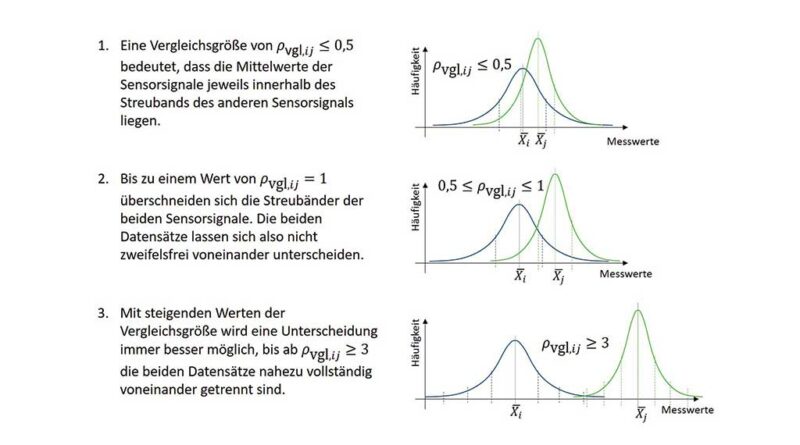
Unter der Annahme, dass die Standardabweichungen der beiden verglichenen Datensätze gleich groß und normalverteilt sind, lassen sich für Pvgl,ij verschiedene Zustände definieren (Abb. 3).
Ergebnisse und Diskussion
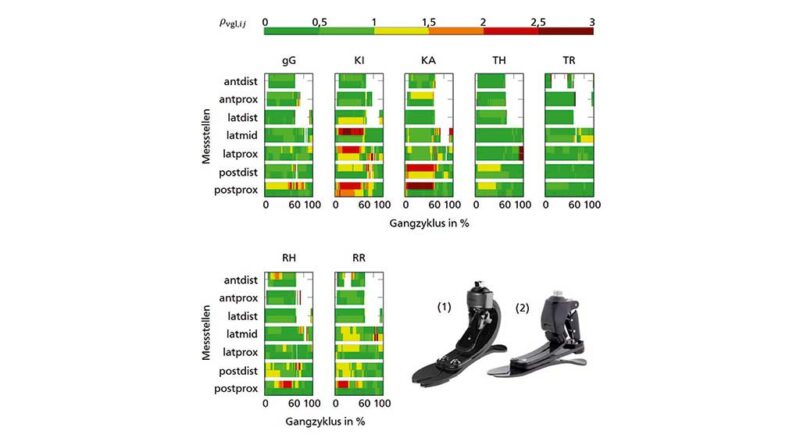
Abbildung 4 stellt die Vergleichsgröße Pvgl,ij der erfassten Relativbewegungsdaten mit Variation der Prothesenfußkomponente dar. Pro Einzelgrafik werden in Abhängigkeit vom Gangszenario jeweils die beiden Bewegungsrichtungen der Sensordaten an den sieben Messstellen miteinander verglichen. Das Farbschema spiegelt dabei die Unterscheidbarkeit der erfassten Messdaten wider, also inwiefern sich das Tragen des anderen Prothesenfußes auch in der erfassten Relativbewegung zeigt. Wie in Abbildung 3 beschrieben, lassen sich in den grünen Bereichen „Pvgl,ij ≤1) die verglichenen Messdaten der Relativbewegung nicht zweifelsfrei voneinander unterscheiden. Mit steigender Größe von Pvgl,ij lassen sich jedoch Unterschiede in den verglichenen Relativbewegungsdaten identifizieren, die auf das Tragen der beiden unterschiedlichen Prothesenfußkomponenten zurückzuführen sind (Abb. 4, rechts unten).
Mit Ausnahme des Gangszenarios „Treppe hinunterlaufen“ (TR) sind mit Variation der Prothesenfußkomponente im Speziellen an den posterioren Messstellen Unterschiede in den Relativbewegungsdaten erkennbar (vgl. Pvgl,ij ≥ 1), wobei sich diese im Besonderen auf die Standphase konzentrieren. Mit Ausnahme des Gangszenarios „Rampe Hinauflaufen“ (RH) zeigen die Relativbewegungsdaten jedoch qualitativ den gleichen gangzyklusabhängigen Verlauf (nicht dargestellt; vgl. 26, Abb. A.5–A.7). Allerdings wird – unabhängig vom Gangszenario – in der Standphase bei Verwendung der Prothesenfußkomponente „Pro-Flex Pivot“ (Punkt-Strich-Linie) mehr Relativbewegung erfasst als bei Nutzung des Modells „Pro-Flex XC“ (durchgezogene Linie).
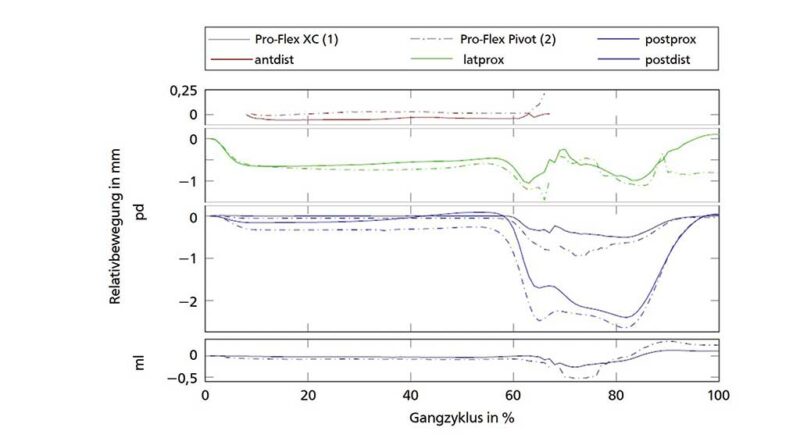
Beim Hinauflaufen der Rampe ist an der Messstelle „postprox“ zusätzlich eine Änderung im Relativbewegungsmuster vorhanden (Abb. 5, blaue Verläufe in pd-Richtung): Während sich der Beinstumpf bei Verwendung des Passteils „Pro-Flex XC“ im Verlauf der Standphase über die Neutralstellung (ca. 40 % GC) hinweg von distal nach proximal bewegt, ist die Position des Beinstumpfs innerhalb des Prothesenschafts bei Nutzung des Modells „Pro-Flex Pivot“ nach Lastübernahme nahezu konstant (Abb. 5). Tendenziell werden gangszenarienübergreifend beim Passteil „Pro-Flex Pivot“ in der Standphase höhere Relativbewegungen erfasst als beim Modell „Pro-Flex XC“. Inwiefern die unterschiedlichen Eigenschaften der Prothesenfußkomponenten – beispielsweise Bewegungsumfang oder Vertikaldämpfung – für das veränderte Relativbewegungsverhalten verantwortlich sind, ist ohne weitere Untersuchungen nicht abschätzbar.
Im Gegensatz dazu lässt sich die Änderung des qualitativen Verlaufs der Relativbewegung in pd-Richtung im Gangszenario „Rampe hinauflaufen“ mit dem größeren Bewegungsumfang des Passteils „Pro-Flex Pivot“ begründen: Die Adaption der menschlichen Lokomotion an positive Steigungen wird maßgeblich dem Knöchel zugeschrieben, während das Hinunterlaufen über eine Knieadaption realisiert wird 27. Dieser Nutzen des Modells „Pro-Flex Pivot“ gegenüber dem Passteil „Pro-Flex XC“ wird für das Gangszenario RH auch vom Versuchsteilnehmer deutlich wahrgenommen, wie anhand der SFCS-Werte zu erkennen ist: SFCS = 7 („Pro-Flex Pivot“) gegenüber SFCS = 5 („Pro-Flex XC“).
Fazit und Praxisempfehlungen
Lediglich für das Gangszenario „Rampe hinauflaufen“ konnten in den Relativbewegungsdaten Veränderungen im qualitativen Verlauf identifiziert werden. Diese stützen die These von Hansen und Kollegen 28, wonach beim menschlichen Gang die Anpassung an positive Rampensteigungen über eine Adaption des Knöchels erfolgt. Das Modell „Pro-Flex Pivot“ mit seinem höheren Bewegungsumfang kann diese Adaption besser leisten als das Passteil „Pro-Flex XC“, was sich zusätzlich in der subjektiven Bewertung des Schaftkomforts äußert (SFCS = 7 vs. SFCS = 5).
Auch in den weiteren Gangszenarien lassen sich Unterschiede in den Relativbewegungsdaten identifizieren, wobei es sich jedoch nicht um Veränderungen im qualitativen Verlauf handelt. Tendenziell werden bei Verwendung des Modells „Pro-Flex Pivot“ in der Standphase höhere Relativbewegungen erfasst als bei Verwendung des Modells „Pro-Flex XC“.
Trotz fehlender Erklärungen für die identifizierten Unterschiede konnte anhand der Relativbewegungsdaten der Mehrwert eines größeren Bewegungsumfangs im Knöchelgelenk für das Gangszenario „Rampe hinauflaufen“ aufgezeigt werden. Prinzipiell scheint die Messung der Relativbewegung demnach durchaus dazu geeignet zu sein, Hypothesen in Bezug auf die Eigenschaften spezieller Prothesenkomponenten zu überprüfen.
Für die Autoren:
Prof. Dr.-Ing. Stephan Rinderknecht
Leitung
Institute for Mechatronic Systems
Technische Universität Darmstadt
Otto-Berndt-Straße 2
64287 Darmstadt
rinderknecht@ims.tu-darmstadt.de
Begutachteter Beitrag/reviewed paper
Ungermann V, Brehm M, Rinderknecht St. Untersuchung des Einflusses des Fußpassteils auf die dynamische Stumpf-Schaft-Interaktion anhand von Relativbewegungsmessungen. Orthopädie Technik, 2021; 72 (8): 32–35

- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Noll V, Wojtusch J, Schuy J, Grimmer M, Beckerle P. Measurement of biomechanical interactions at the stump-socket interface in lower limb prostheses. Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, August 2015: 25–29
- Childers WL, Siebert S. Marker-based method to measure movement between the residual limb and a transtibial prosthetic socket. Prosthet Orthot Int, 2016; 40: 720–728
- Eshraghi A, Abu Osman NA, Karimi MT, Gholizadeh H, Ali S, Abas WW, Azam MN. Quantitative and qualitative comparison of a new prosthetic suspension system with two existing suspension systems for lower limb amputees. Am J Phys Med Rehabil, 2012; 91: 1028–1038
- Gholizadeh H et al. Transtibial prosthetic socket pistoning: static evaluation of Seal-InR X5 and DermoR Liner using motion analysis system. Clin Biomech (Bristol, Avon), 2012; 27: 34–39
- Appoldt F et al. The results of slip measurements in above-knee suction sockets. Bull Prosthet Res, 1968; 3: 106–112
- Gholizadeh H et al. A new approach for the pistoning measurement in transtibial prosthesis. Prosthet Orthot Int, 2011; 35: 360–364
- Sanders JE et al. A noncontact sensor for measurement of distal residuallimb position during walking. J Rehabil Res Dev, 2006; 43: 509–516
- Henrikson KM et al. An Inductive Sensing System to Measure In-Socket Residual Limb Displacements for People Using Lower-Limb Prostheses. Sensors, 2018; 18: 3840
- Gerschutz MJ et al. Dynamic Effectiveness Evaluation of Elevated Vacuum Suspension. J Prosthet Orthot, 2015; 27, 161–165
- Swanson EC et al. Instrumented socket inserts for sensing interaction at the limb-socket interface. Med Eng Phys, 2018; 51: 111–118
- Gerschutz MJ et al. Dynamic Effectiveness Evaluation of Elevated Vacuum Suspension. J Prosthet Orthot, 2015; 27, 161–165
- Wernke MM et al. Progress Toward Optimizing Prosthetic Socket Fit and Suspension Using Elevated Vacuum to Promote Residual Limb Health. Adv Wound Care, 2017; 6: 233–239
- Noll V, Wojtusch J, Schuy J, Grimmer M, Beckerle P. Measurement of biomechanical interactions at the stump-socket interface in lower limb prostheses. Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, August 2015: 25–29
- Childers WL, Siebert S. Marker-based method to measure movement between the residual limb and a transtibial prosthetic socket. Prosthet Orthot Int, 2016; 40: 720–728
- Sanders JE et al. A noncontact sensor for measurement of distal residuallimb position during walking. J Rehabil Res Dev, 2006; 43: 509–516
- Vempala V et al. A practical approach for evaluation of socket pistoning for lower limb amputees. Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Honolulu, HI, USA, July 17–21, 2018: 3938–3941
- Noll V et al. A sensor to acquire the relative movement between residual limb and prosthetic socket. Systems, Man, and Cybernetics (SMC), 2016; IEEE International Conference on Systems, Man, and Cybernetics, Budapest, October 9–12, 2016. https://tubiblio.ulb.tu-darmstadt.de/83495/ (Zugriff am 16.06.2021)
- Noll V et al. Systematic Experimental Assessment of a 2D-Motion Sensor to Detect Relative Movement between Residual Limb and Prosthetic Socket. Sensors, 2018; 18: 7
- Noll V et al. A Sensor Array for the Measurement of Relative Motion in Lower Limb Prosthetic Sockets. Sensors, 2019; 19 (12): 2658. https://www.mdpi.com/1424–8220/19/12/2658 (Zugriff am 16.06.2021)
- Ungermann V. Relativbewegung als objektiver Beurteilungsfaktor der Stumpf-Schaft-Interaktion von Beinprothesen. Duren: Shaker, 2020
- Schuy J. Variable Torsionssteifigkeit in Unterschenkelprothesen zur aktiven Unterstützung in dynamischen Gangsituationen. Aachen: Shaker, 2016
- Hanspal RS et al. Prosthetic socket fit comfort score. Disability and Rehabilitation,2003; 25 (22): 1278–1280
- Ungermann V. Relativbewegung als objektiver Beurteilungsfaktor der Stumpf-Schaft-Interaktion von Beinprothesen. Düren: Shaker, 2020
- Össur hf. Pro-Flex Fußfamilie. https://assets.ossur.com/library/36539/Pro-Flex%20Brosch%C3%BCre.pdf (Zugriff am 17.05.2021)
- Heitzmann D et al. Evaluation of a novel prosthetic foot while walking on level ground, ascending and descending a ramp. Gait & Posture, 2015; 42: S94–S95
- Ungermann V. Relativbewegung als objektiver Beurteilungsfaktor der Stumpf-Schaft-Interaktion von Beinprothesen. Düren: Shaker, 2020
- Hansen AH et al. Roll-over characteristics of human walking on inclined surfaces. Human Movement Science, 2004; 23 (6): 807–821
- Hansen AH et al. Roll-over characteristics of human walking on inclined surfaces. Human Movement Science, 2004; 23 (6): 807–821
