Entwicklung bioinspirierter und selbstformender Orthesen per 4D-Druck
T. Cheng, M. Thielen, S. Poppinga, Y. Tahouni, D. Wood, Th. Steinberg, A. Menges, Th. Speck
Unter dem Begriff „4D-Druck“ versteht man 3D-Druckverfahren, bei denen sich die erzeugten Werkstücke noch nach dem eigentlichen Druckverfahren durch externe Stimuli wie Temperatur oder Feuchtigkeit kontrolliert verformen. Die vierte Dimension ist somit die Zeit bis zum Erreichen einer späteren Gestalt. In diesem Artikel wird ein Ansatz zur Materialprogrammierung für selbstformende Materialsysteme auf der Grundlage biologischer Vorbilder vorgestellt, die per 4D-Druck erstellt werden. Der Ansatz basiert auf einem Berechnungsmodell zur Bestimmung mechanischer Eigenschaften und zur Gestaltung von Formänderungen. Mit Hilfe des 3D-Drucks werden mittels Extrusion die gewünschten Eigenschaften und Verhaltensweisen in einem Multi-Material- und Multi-Layer-System kodiert, das auf der Mesoskala mit einer maximalen Auflösung von 0,5 mm strukturiert ist.
Die Methodik wurde anhand einer Fallstudie zum biomimetischen Design evaluiert. Hierbei wurde die Haftstrategie einer sich windenden Kletterpflanze, der Luftkartoffel (Dioscorea bulbifera), die auf der Generierung von Anpresskräften beruht, abstrahiert und auf eine durch 4D-Druck hergestellte Orthese übertragen. Die von den bioinspirierten Mechanismen erzeugten Anpresskräfte wurden anschließend mit Sensoren gemessen.
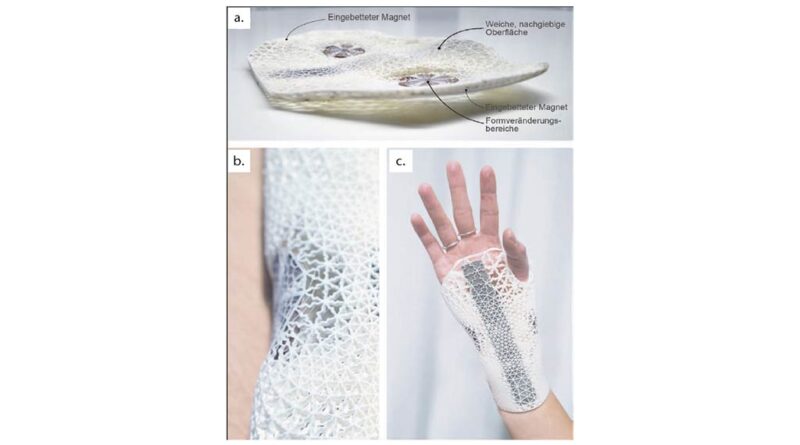
Schließlich wurden die programmierten auf Selbstspannung beruhenden Anpresskräfte und die integrierte Multifunktionalität in eine Reihe prototypischer Handgelenk-Unterarm-Schienen in Form von Demonstratoren übertragen – ein gängiges orthopädisches Hilfsmittel für die Stellungskorrektur oder Entlastung dieses Körperabschnitts. Die aus dem vorgestellten Designansatz resultierenden per 4D-Druck entstandenen Materialsysteme unterstreichen die Vorteile der Übertragung biomimetischer Prinzipien auf orthopädische Hilfsmittel und darüber hinaus.

