1. Einführung
Oberarmprothesen finden Anwendung bei Amputationen oberhalb des Ellenbogens. In Italien betreffen 25 % der vom NHS verzeichneten Amputationen die obere Extremität – etwa 4.000 pro Jahr 1. 17 % der Armamputationen sind transhumerale Amputationen oder Ellenbogenexartikulationen. In den USA haben von 100.000 Armamputierten etwa 18 % eine Amputation im Bereich des Oberarms oder darüber 2.

Die Hauptursache für Amputationen sind Traumata, die der Literatur zufolge für 68,6 bzw. 61 % 3 4 der Fälle verantwortlich sind; die zweithäufigste Ursache sind Tumoren mit 23,9 %. Anders als bei den unteren Extremitäten sind Gefäßerkrankungen nur selten, und zwar nur in 4 % der Fälle, der Grund für eine Amputation 5.
Es gibt zwei Typen funktioneller Oberarmprothesen: (zuggesteuerte) Eigenkraftprothesen und Fremdkraftprothesen.
Die Funktionalität zuggesteuerter Prothesen ist auf das Öffnen und Schließen der Hand und auf das Beugen, Strecken und Arretieren des künstlichen Ellenbogens beschränkt. Der Schaft hat Kontakt zum Stumpf und wird von Gurten, die über den Rücken verlaufen, gehalten. Zuggesteuerte Prothesen werden durch wohldefinierte Bewegungen des Stumpfs betätigt und gesteuert. Diese Bewegungen, die in der Regel mit der Schulter, dem Oberarm oder der Brust ausgeführt werden, steuern den Ellenbogen und die Hand mithilfe eines Gurtsystems. Der zuggesteuerte Ellenbogen ist sehr leicht und die Steuerung erfolgt durch physiologische und natürliche Bewegungen, insbesondere bei einem kurzen Oberarmstumpf ist jedoch die Anpassung schwierig.
Bei einer Fremdkraftprothese werden die einzelnen spezifischen Bewegungen durch eine Batterie ermöglicht. Dabei haben sich EMG-Signale als wirksame Möglichkeit der Prothesensteuerung erwiesen 6. Die myoelektrische Steuerung erfolgt über Elektroden im Schaft, die mit der Haut Kontakt haben und das durch Muskelkontraktionen erzeugte Signal erkennen. Die Steuerung der Prothese beim Öffnen und Schließen der Hand, die durch die selektive Kontraktion zweier verbliebener Muskeln bewerkstelligt wird, ist für die Patienten leicht zu verstehen. Bei einer distalen Amputation, wenn Ellenbogen und Handgelenk noch vorhanden sind, können bis zu vier Elektroden verwendet werden, um die sechs möglichen Funktionen zu steuern: Öffnen, Schließen, Pronation, Supination, Flexion und Extension.
Die Steuerung der Prothese mithilfe von weniger Elektroden als Funktionen wird durch die Anwendung unterschiedlicher Techniken umgesetzt, wie z. B. der Reihe nach Ansteuern der Gelenke. Bei dieser Technik werden zwei Elektroden für die Bewegungen und eine für die zyklische Auswahl der Gelenke benötigt. Anstelle der dritten Elektrode kann ein digitaler Schalter (z. B. ein Zugschalter) verwendet werden, oder die Bewegungen können durch die Ko-Kontraktion der beiden Muskeln gesteuert werden.
Dieser Ansatz ist einerseits zwar äußerst zuverlässig und funktional, andererseits jedoch unnatürlich und mühsam, und der Patient muss die Bewegung in die Einzelbewegungen der Gelenke aufteilen. Wenn die Anzahl der Freiheitsgrade zunimmt, ist dieser Ansatz nicht geeignet und es müssen neue Strategien der Steuerung konzipiert werden.
In den letzten Jahren wurden mehrere Studien über Alternativen zur Standardtechnik der myoelektrischen Steuerung publiziert, wie z. B. der Einsatz eines Mini-Joysticks als Prothesensteuerung bei angeborenen Fehlbildungen oder eines resistiven Kraftsensors (force sensitive resistor, FSR) und eines zweiachsigen Joysticks als Steuerung bei Schulterexartikulationen 7.
Darüber hinaus werden neue chirurgische Methoden entwickelt, wie z. B. die Targeted Muscle Reinnervation (TMR; selektiver Nerventransfer), bei der nach der Amputation im Stumpf verbliebene motorische Nerven mit anderen Muskeln verbunden werden. Die Zielmuskel haben keine biomechanische Funktion mehr. Der reinnervierte Muskel wird vielmehr als biologischer Verstärker der Signale der amputierten Nerven genutzt. Die Signale dieser reinnervierten Muskeln können mit Oberflächenelektroden erfasst werden und als zusätzliche Steuersignale für die neue Prothese dienen 8.
Schwierigkeiten bei der Herstellung eines effektiven Steuerungs-Interface sind der Hauptgrund für die mangelnde Akzeptanz einer Prothese. Etwa 50 % der Neupatienten, die eine Prothese erhalten, kommen von dieser Technologie schließlich wieder ab, da sie den Funktionsgewinn im Vergleich zur Schwerfälligkeit der verfügbaren Steuerungen als begrenzt ansehen 9.
Der Zweck dieser Arbeit ist es, die Möglichkeiten zu untersuchen, Prothesen mithilfe eines Inertial-Interface zu steuern. Die Annahme dabei ist, dass der Einsatz eines Inertial-Interface ein intuitives Steuerungssystem bieten kann, das für den Patienten leicht zu verstehen, kostengünstig und nicht-invasiv ist und das Konzept sowie den Gebrauch der Prothese vereinfacht.
Die Autoren konzentrieren sich auf die Steuerung einer Prothese mit drei elektromechanischen Gelenken: Hand, Handgelenk und Ellenbogen. Zur Steuerung der Hand sehen sie Standard-EMG-Elektroden, zur Steuerung des Handgelenks und des Ellenbogens den Inertialsensor vor. Der Ansatz mit Zweifach-Interface ermöglicht darüber hinaus die gleichzeitige Steuerung zweier verschiedener Gelenke.
Komponente
- Hand
- Handgelenk
- Ellenbogen
Funktion
- Öffnen/Schließen
- Drehung
- Flexion/Extension
Sensor
- Elektroden
- Akzelerometer
- Akzelerometer
2. Material und Methoden
2.1 Beschreibung des Probanden
Bei dem Probanden handelte es sich um einen 65-jährigen, weisen Italiener (Initialen F.C.), bei dem 1975 wegen eines Arbeitsunfalls eine traumatische Amputation (Typ: Myoplastik) des rechten Oberarms, genau gesagt, eine Ellenbogenexartikulation, vorgenommen wurde. Seine erste Prothese erhielt er 1977. F.C. nutzt die Prothese aktiv während des ganzen Tages. Seine Krankengeschichte wies keine anderen schweren Traumata oder Krankheiten auf. Vor den Tests unterschrieb der Patient eine Einverständniserklärung.
2.2 Aufbau der Prothese
Der Patient erhielt eine Hybridprothese mit myoelektrischer Steuerung der Hand durch Signale von Bizeps und Trizeps und kinematischer Steuerung des Ellenbogens. Das passive Handgelenk wird vom Patienten mit der gesunden Hand bewegt.
2.3 Einrichtung von Hardware und Software
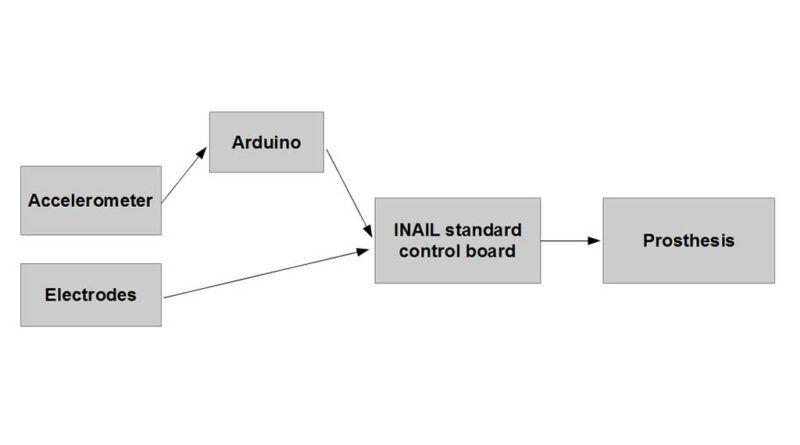
- Arduino ist eine quelloffene (Open Source) Physical-Computing-Plattform auf der Grundlage einer einfachen Eingangs-/Ausgangs-(I/O-)Platine und einer Entwicklungsumgebung zur Implementierung der Programmiersprache 10. Die Arduino-Platine verwaltet alle Akzelerometer-Daten und sendet Bewegungsbefehle an die Standard-Steuerungsplatine des INAIL. Die Befehle werden simuliert und erzeugen das EMG-Signal auf der Grundlage der Akzelerometer-Daten (Abb. 1).
- Die Steuerungsplatine, die im INAIL-Prothesenzentrum zur Steuerung von Armprothesen verwendet wird, ist die INAIL-Standard-Steuerungsplatine CLC2000. Mit dieser Platine können bis zu vier EMG-Signale verarbeitet und bis zu drei DC-Motoren (Hand, Handgelenk und Ellenbogen) angetrieben werden. Unter Verwendung der internen Firmware kann der Anwender das Verhalten der Prothese der Anzahl verfügbarer EMG-Signale und den Bedürfnissen des Patienten entsprechend anpassen.
- Der Adxl355 von Analog Devices ist ein kleines 3‑Achsen-Akzelerometer mit Signalkonditionierung der Ausgangsspannung. Das Gerät misst Beschleunigungen über einen Messbereich von mindestens ± 3 g 11.
- Der für die Tests verwendete Prothesenarm bestand aus der myoelektrisch gesteuerten Handprothese DMC plus® und dem Elektro-Dreheinsatz für das Handgelenk 13E195 von Ottobock sowie dem Ellenbogen INAIL EMEI 2.0.
2.4 Datenerfassung und ‑filterung
Der erste Schritt ist die Kalibrierung des Sensors in Ruhe, dann werden die vom Sensor ausgegebenen analogen Daten auf dem Arduino-Board in einen digitalen Wert konvertiert, der die Gravitationsbeschleunigung repräsentiert.
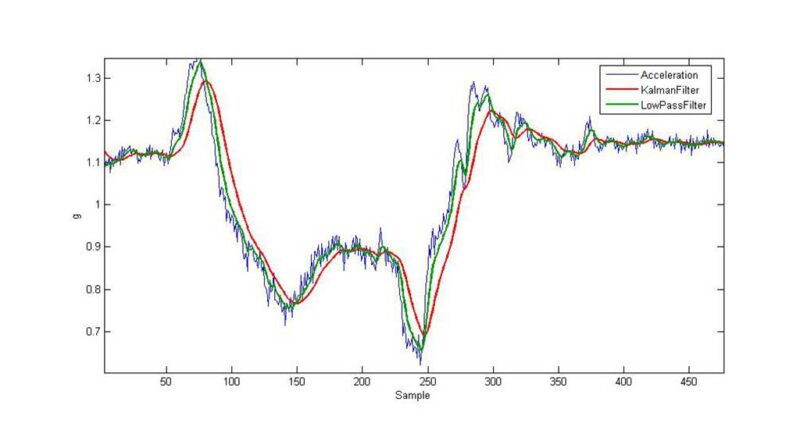
Die Daten sind, vor allem infolge von Vibrationen und unwillkürlichen Bewegungen, verrauscht. Um dieses Problem zu lösen, wurde mit zwei verschiedenen Filtern experimentiert:
- einem Infinite-Impulse-Response-Tiefpassfilter (IIR) und dem
- Kalman-Filter.
In Abbildung 2 können die verschiedenen Kurven, die die Originaldaten und die gefilterten Daten darstellen, miteinander verglichen werden. Bei den abschließenden Untersuchungen wurde der Kalman-Filter verwendet, da hiermit das Sensorverhalten im Hinblick auf die Steuerung der Prothese verlässlicher war.
2.5 Verarbeitung der Daten
Die Ausgabe des Akzelerometers adxl335 kann als Summe von zwei Komponenten der Beschleunigung angesehen werden: der statischen Beschleunigung durch die Gravitation und der dynamischen Beschleunigung durch Bewegungen, Stöße oder Schwingungen.
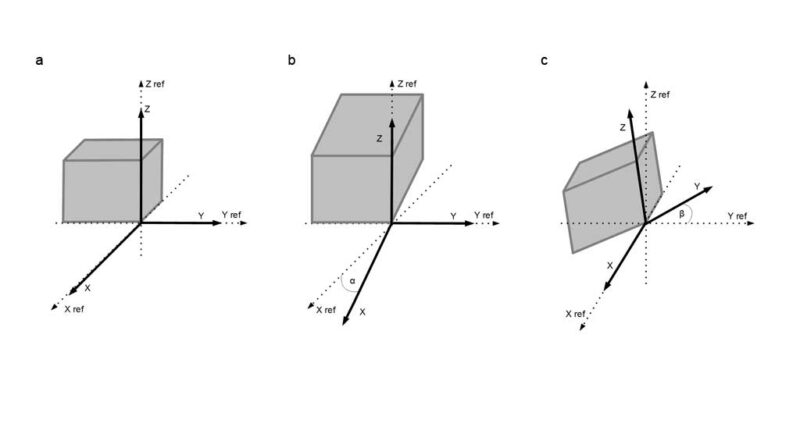
Der entwickelte Algorithmus nutzt statische Beschleunigungen, um die Position des Stumpfes zu bestimmen, und dynamische Beschleunigungen, um zwischen verschiedenen Zuständen der Prothese umzuschalten (z. B. Gebrauchsmodus, gesperrt-entsperrt, Gehmodus). Die Orientierung des festen Körpers wird mit Euler-Winkeln beschrieben, und mithilfe trigonometrischer Formeln können die Neigungswinkel des Akzelerometers bezüglich eines Kartesischen Referenzsystems berechnet werden (Abb. 3a – c):
α = — arctangx/gz β = — arctangy/gz
Wenn das Gerat sowohl gegenüber der x- als auch gegenüber der y‑Referenzachse geneigt ist, müssen alle drei Komponenten der Gravitationsbeschleunigung zur Berechnung des Drehwinkels herangezogen werden:
α = — arctan gx/(√ (gy2 + gz2))
β = — arctan gy/(√ (gx2 + gz2)).
2.6 Prothesenmanagement
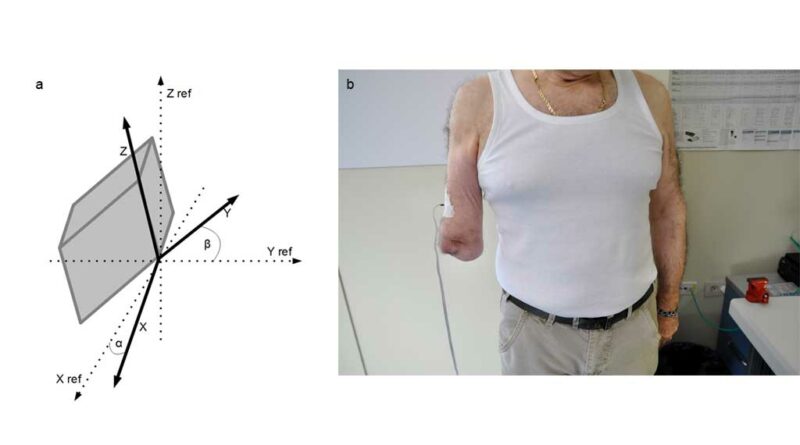
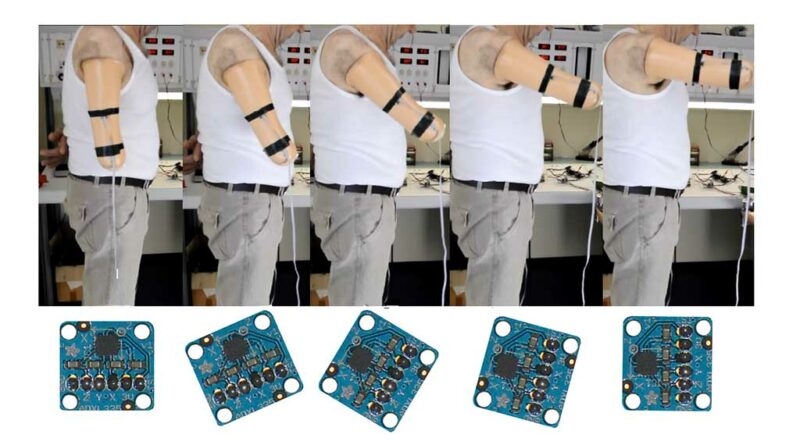
Es ist sehr wichtig, die optimale Position für das Akzelerometer zu bestimmen. Die Autoren haben das Akzelerometer in den Schaft oberhalb der Tuberositas deltoidea platziert, was eine gute Lösung darstellt (Abb. 4a u. b). Im Allgemeinen können die Länge und die Beweglichkeit des Stumpfes von einem Patienten zum anderen variieren, und es muss für jeden einzelnen die optimale Position gefunden werden, um ein Höchstmaß an Bewegungsmöglichkeiten für den Stumpf zu erreichen. Die Flexion/Extension des Ellenbogens und die Drehung des Handgelenks sind abhängig von der Beweglichkeit des Stumpfes (Abb. 5a u. b).
Die wichtigste Einschränkung ist der Einfluss durch Beschleunigungen aufgrund der Bewegung des Körpers im Raum. Um dieses Problem zu lösen, haben wir zwei verschiedene Funktionsmodi vorgesehen:
- Gebrauchsmodus
- Gehmodus.
Im „Gebrauchsmodus“ liefert das System eine Flexion/Extension des Ellenbogens, die der Bewegung des Stumpfes in Echtzeit folgt. Flexions- und Extensionsbewegungen des Stumpfes in der Sagittalebene sind äquivalent mit einer Drehung um die Querachse (z‑Achse). Diese Bewegungen ergeben einen ALPHA-Winkel (siehe Abb. 4a) bezüglich des Kartesischen Referenzsystems.
Die Geschwindigkeit, mit der der ALPHA-Winkel größer wird, bestimmt die Geschwindigkeit der Ellenbogen-Flexion; die Geschwindigkeit, mit der der ALPHA-Winkel kleiner wird, bestimmt die Geschwindigkeit der Ellenbogen-Extension (Abb. 6).
Adduktions- und Abduktionsbewegungen in der Frontalebene sind äquivalent mit einer Drehung um die Langsachse (x‑Achse). Diese Bewegungen ergeben einen BETA-Winkel (siehe Abb. 4a), der positiv ist bei Abduktions- und negativ bei Adduktionsbewegungen. Das Handgelenk dreht sich, wenn ein bestimmter BETA-Winkel der Adduktion oder Abduktion erreicht ist.
Der Gehmodus wurde eingeführt, um unerwünschte Bewegungen des Ellenbogens oder des Handgelenks infolge von Bewegungen des Körpers im Raum (beim Gehen) zu vermeiden und um dem Patienten die Möglichkeit zu geben, den Ellenbogen in jeden gewünschten Flexions- und Extensionswinkel zu bringen, während er mit dem Stumpf in die neutrale Position zurückkehrt. Eine typische Aktivität des täglichen Lebens ist z. B. zu gehen und dabei mit dem gebeugten Unterarm einen Mantel oder einen sonstigen Gegenstand zu tragen. Wenn das System in diesen Modus schaltet, ist es z. B. möglich, den Ellenbogen völlig locker zu lassen und problemlos das physiologische Schwingen des Armes beim Gehen auszuführen.
Zum Umschalten zwischen den Modi (Gebrauchsmodus – Gehmodus – Gebrauchsmodus) werden dynamische Beschleunigungen genutzt: Durch eine einzelne kleine Bewegung kann in den Gehmodus und wieder zurück in den Gebrauchsmodus gewechselt werden.
Um den Grenzwert der Beschleunigung für das Umschalten korrekt zu bestimmen, muss in jeder Stumpfposition die Bewegung im Raum berücksichtigt werden, zur Berechnung des Beschleunigungsvektors muss die Beschleunigung entlang aller drei Achsen berücksichtigt werden.
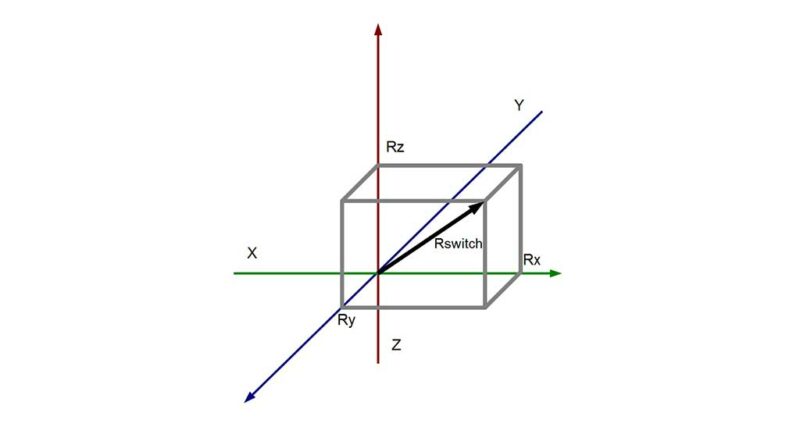
Wie aus Abbildung 7 ersichtlich wird, repräsentiert der Vektor Rswitch den Beschleunigungsvektor, wobei Rx, Ry und Rz die Komponenten auf der x‑, y- und z‑Achse sind. Durch Anwendung des Satzes des Pythagoras im dreidimensionalen Raum errechnet sich der Vektor Rswitch:
Rswitch = √ Rx2 + Ry2 + Rz2.
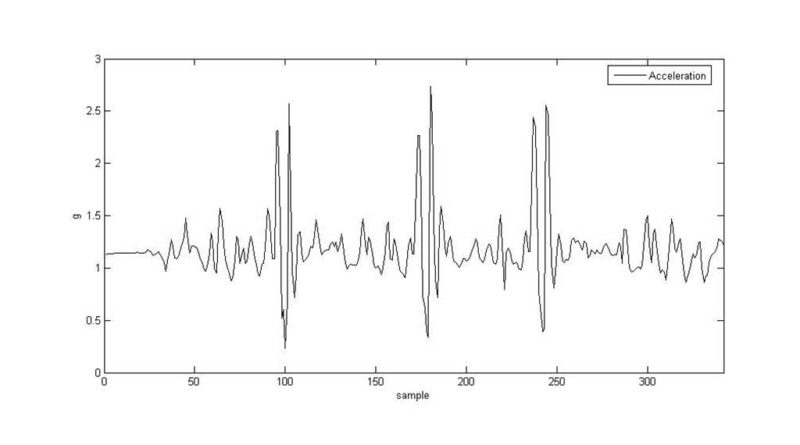
Aus Abbildung 8 ist ersichtlich, dass die mit der raschen Schulterhebung verbundene Beschleunigung einen Rswitch-Vektor ergibt, dessen Absolutwert größer ist als der des jeweiligen Gangzyklus, wodurch falsche Positive ausgeschlossen sind.
Mit einer einzelnen raschen Hebung der Schulter kann in den Gehmodus mit inaktiver Prothesensteuerung umgeschaltet werden. Umgekehrt kann mit einer weiteren raschen Bewegung in den Gebrauchsmodus zurückgeschaltet und die Prothesensteuerung aktiviert werden.
3. Ergebnisse
Die wichtigste Eigenschaft dieses Interface ist eine gute Propriorezeption, was das Konzept der Prothese und die Handhabung der Prothesenkomponenten deutlich vereinfacht.
Es wurden Tests mit Nichtamputierten sowie mit einem Patienten mit Ellenbogenexartikulation durchgeführt. Nach 30 Minuten Training wurde eine gute Kontrolle der Prothese sowie ein sehr gutes Gefühl dieser Technologie gegenüber erreicht.
Darüber hinaus wurden auch Tests mit zwei gesunden Probanden durchgeführt, bei denen eine proximale bzw. distale Amputation simuliert wurde. Deren Ergebnisse waren ermutigend, da bei Positionierung des Akzelerometers in jeder beliebigen Höhe eine gute Kontrolle der Prothese erreicht wurde.
4. Diskussion
Dieses Inertial-Interface kann bei Amputationen in jeder Höhe eingesetzt werden, solange hinsichtlich des Schultergürtels keine funktionellen Einschränkungen bestehen.
Diese Technologie verkürzt den Lernprozess im Vergleich zu dem, der bei anderen Prothesenarten typisch ist (zuggesteuerte Prothesen). Von der ersten Anwendung an ergibt sich ein positives Gefühl und eine effektive und produktive Steuerung der Prothese.
In einigen Fällen zeigte der Patient beim Beugen des Armes die Tendenz, den Stumpf nach innen zu drehen, was zu Signalüberlappung und unerwünschten Bewegungen führte. Zur Vermeidung dieses Problems ist eine Kalibrierung erforderlich, um den für eine effiziente Steuerung des Handgelenks optimalen Abduktions- bzw. Adduktionswinkel zu finden.
Die Ellenbogensteuerung ist besonders positiv zu bewerten, da sie physiologisch und intuitiv ist. Ein weiterer Vorteil dieser Art der Steuerung ist die Möglichkeit, verschiedene Bewegungen gleichzeitig durchzuführen, wie z. B. Flexion des Ellenbogens (mithilfe des Akzelerometers) und Öffnen der Hand (durch die Elektroden). Dies senkt den Kraftaufwand, da es nicht erforderlich ist, Kraft zum Ziehen an Bandagen oder für wiederholte Muskelkontraktionen einzusetzen.
Diese Technologie führt zu einer nur geringen Gewichtszunahme bei der Prothese und macht es möglich, mit weniger oder ganz ohne Bandagen auszukommen (Hybridprothesen).
Wie aus Abbildung 8 zu ersehen ist, wird beim Gehen der Schwellenwert für das Umschalten nicht erreicht, sondern es werden signifikante Signale erkannt, die dann zur Steuerung von Ellenbogen und Handgelenk dienen. Alle Flexions- und Extensionsbewegungen des Ellenbogens und Drehungen des Handgelenks sollten im Stehen ausgeführt werden. Die Steuerung der Prothese kann nicht im Gehen erfolgen, doch nach Ansicht der Autoren ist diese Einschränkung nicht gravierend, da Patienten, die zuggesteuerte oder myoelektrisch gesteuerte Prothesen benutzen, diese aus Gründen des sicheren und präzisen Gebrauchs nur selten im Gehen aktiv steuern.
5. Schlussfolgerungen und zukünftige Entwicklungen
In dieser Arbeit wird der Einsatz eines Akzelerometers zur Steuerung einer Oberarmprothese beschrieben. Dieses Interface scheint intuitiv und leicht verständlich und vereinfacht das Konzept und den Gebrauch der Prothese.
Die erste Anwendung lieferte positive Rückmeldung und die Ergebnisse sind ermutigend, jedoch müssen einige Probleme noch gelöst werden, um eine zuverlässige Prothese zu erhalten. Aufgrund seiner geringen Größe und seines niedrigen Gewichts kann das Akzelerometer auch bei anderen Amputationshohen in die Prothese integriert werden, sogar bei einer Teilprothese für die Hand, sowohl als Hilfsmittel für die aktive Steuerung als auch für das Management des Prothesenzustands.
Um die Größe der Steuerplatine zu minimieren und klinische Studien in der Anwendungssituation durchführen zu können, müssen das Arduino-Board und die INAIL-CLC2000-Platine in einer einzigen Platine zusammengefasst werden.
Mit dieser neuen Platine werden die Autoren weitere klinische Tests bei verschiedenen Stumpflängen durchführen, um Anwendungsrichtlinien für dieses neue Steuerungssystem zu definieren.
Für die Autoren:
Eng. Angelo Davalli
Trainings- und Dokumentationsmanager
INAIL Prothesenzentrum
Via Rabuina, 14
I – 40054 Vigorso di Budrio (Bo)
a.davalli@inail.it
Begutachteter Beitrag/Reviewed paper
Davalli A, Battistini F, Sacchetti R. Steuerung von Oberarmprothesen mithilfe von Inertialsensoren. Orthopädie Technik, 2013; 64 (9): 18–23

- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Ministero della Salute. www.salute.gov.it/ricoveriOspedalieri/ric_informazioni/default.jsp
- Richard F, Weir FF, Grahn ED. Powered Humeral Rotator for Persons with Shoulder Disarticulation Amputations. Chicago (IL): Jesse Brown VA Medical Center, Department of Veterans Affairs
- National Limb Loss Information Center. Fact sheet: Amputation Statistics by Cause Limb Loss in the United States. Knoxville (TN): Amputee Coalition of America, 2008
- National Service Scotland. The amputee statistical database for the United Kingdom: 2006/2007; Information Services Division NHS Scotland: Edinburgh, 2009
- Charles M, Fryer BS, John MS, Michael W, Ed M. C.P.O. Atlas of Limb Prosthetics: Surgical, Prosthetic, and Rehabilitation Principles. Second Edition, 1992
- Pulliam CL, Lambrecht JM, Kirsch RF. Electromyogram-based neural network control of transhumeral prostheses. 2010; (12): 17
- Lipschutz RD, Lock B, Sensinger J, Schultz AE, Kuiken TA. Use of two-axis joystick for control of externally powered shoulder disarticulation prostheses. Chicago (IL): Center for Bionic Medicine, Rehabilitation Institute of Chicago
- O’Shaughnessy KD, Dumanian GA, Lipschutz RD, Miller LA, Stubblefi eld K, Kuiken TA. Targeted Reinnervation to Improve Prosthesis Control in Transhumeral Amputees. A Report of Three Cases. J Bone Joint Surg Am, 2008; 90: 393–400
- Pulliam CL, Lambrecht JM, Kirsch RF. Electromyogram-based neural network control of transhumeral prostheses. 2010; (12): 17
- Banzi M. Getting Started with Arduino O’Reilly Vlg. Gmbh & Co. 2011; 2
- Analog device. Adxl335 datasheetandapplicationnote, 2010
