Einleitung/Motivation
Die Nachbildung menschlicher Gliedmaße stellt bis zum heutigen Tag den Konstrukteur vor die Herausforderung, die technischen Funktionen einer Prothese ergonomisch so zu gestalten, dass diese die logische Verlängerung des fehlenden Körperteils darstellt.
Im Bereich Prothetik wurden bislang viele verschiedene Prothesenfüße entwickelt. Es existiert jedoch kein Testverfahren, das bereits in der frühen Funktionsmuster- bzw. Prototypenphase deren Funktion bzw. Funktionalität direkt in Korrelation mit Nutzervorteilen eindeutig darstellen kann.
Dem Entwicklungsteam stehen zur Einschätzung der Funktionalität einer Prothese bislang die folgenden Methoden zur Verfügung:
Zug-/Druck-Prüfmaschine
Diese Maschinen verfügen über eine uni-axial verfahrbare Achse, an der die Prothese zumeist in einer definierten Ausrichtung befestigt ist. Somit kann eine spezielle Belastungssituation, z. B. die Elastizität der Vorfußfeder, geprüft werden.
Prothesen-Testmaschinen
Deutlich spezifischere Testverfahren stellen Prüfmaschinen nach ISO 10328 und ISO 22675 dar 1. Beide Normen dienen der Prüfung von Prothesenkomponenten der unteren Gliedmaßen, wobei an dieser Stelle die Prüfung nach ISO 22675 erläutert werden soll 2.
Diese Maschine verfügt neben der vertikalen eindimensionalen Bewegungsachse zusätzlich über eine unter der Prothese befindliche Neigeplatte, die sich synchron zur ersten Achse bewegen kann. Hierdurch wird ein dynamisches Abrollen der Prothese in Anlehnung an den Prothesengang durch Simulation der „M‑Kurve“ (vertikale Bodenreaktionskraft) ermöglicht.
Prothesen-Walker
Aus der subjektiven Sicht des Entwicklers unerlässlich sind Stiefel (z. B. Aircast Walker), die mittels eines speziell angefertigten Konnektors für Prothesen so umgebaut sind, dass diese sich unter den Stiefeln anbringen lassen. Somit können erste Erkenntnisse über das aktuelle Verhalten der Prothese gewonnen werden. Hansen und Kollegen nutzten beispielsweise diese Methode zum Vergleich und zur Charakterisierung des Roll-over Shape von Prothesenfüßen 3. Leider liefert auch dieses Verfahren aufgrund des im Vergleich zum Amputierten veränderten Aufbaus nur begrenzte Hinweise auf die mechanischen Eigenschaften.
Mehrkörpersimulation
Basierend auf invers- oder vorwärtsdynamischen Modellen kann die Prothese beispielsweise an einem virtuellen menschlichen Körpermodell befestigt und auf dessen Eigenschaften hin simuliert werden.
Prinzipiell ist dies ein Ansatz, um sich iterativ optimierten Ergebnissen zu nähern. Die Simulation setzt jedoch immer voraus, dass das Modell durch Tests hinreichend validiert ist. Somit sind die Ergebnisse mit Vorsicht zu betrachten und schließen den funktionellen Test vor und nach der Simulation nicht aus.
Komplexe Testmaschinen
Um die Belastungen der unteren Extremitäten und des Fußes zu simulieren, existieren mehrdimensionale Maschinentests, die nach spezifischen Anforderungen modifiziert sind. Anwendung finden diese neben der Prothetik auch im Bereich der Schuhentwicklung. Zu nennen sind hier die Ansätze unter der Verwendung sogenannter Hexapods (Stewart-Gough-Plattformen), bei denen über eine komplexe Steuerung mehrerer Aktoren der Untergrund in bis zu 6 Dimensionen bewegt werden kann 4 5 6. Nachteilig hierbei ist die spezifische Auslegung des Testaufbaus auf den jeweiligen Anwendungsfall.
Ein weiteres mehrdimensionales Testverfahren lässt sich durch die Verwendung eines mehrachsigen Roboters realisieren. Erste Untersuchungen wurden für die Anwendung in der Sportschuhtestung unternommen 7. Die Arbeitsgruppe des Fraunhofer IPA Stuttgart stellte 2012 diese Methode erstmals für die Simulation des prothetischen Ganges vor 8. Ein entscheidender Vorteil dieser Methode ist die direkte Verwendung menschlicher Bewegungsdaten für die Robotersteuerung. Damit besteht die Möglichkeit, Prothesenkomponenten mit realen kinematischen und kinetischen Parametern in einem maschinellen Test zu belasten 9 10.
Schließlich steht der Test am amputierten Probanden als Möglichkeit zur Verfügung. Den Vorteilen der realen Belastung und der direkten Aussage über die Qualität der Prothese stehen dabei allerdings ethische Bedenken, inter- und intraindividuelle Unterschiede sowie der organisatorische Aufwand gegenüber.
Aus diesem Grund besteht in den Prüflabors des Fraunhofer IPA in Stuttgart neben einem Prothesenprüfstand nach ISO 22675 und einfachen Zug-/Druck-Prüfmaschinen die Möglichkeit, Prothesenfüße – auch in Kombination mit Prothesen-Kniegelenken – auf ihre individuellen Eigenschaften an einem Roboter zu testen. Aufgrund der Komplexität der Programmierung und Handhabung wurden in den letzten Jahren einige Modifikationen vorgenommen, die im Folgenden näher erläutert werden sollen.
Zielsetzung
Ziel ist es, das Verfahren hinsichtlich seiner Genauigkeit bei der Übertragung von Kinetik- und Kinematik-Parametern sowie die Praktikabilität der verwendeten Methoden und Werkzeuge in einem praktischen Anwendungsfall kritisch zu betrachten und zu bewerten.
Methode/Material
Die Bewegungsdaten wurden im Ganglabor an einem unterschenkelamputierten Probanden aufgezeichnet (m, 31 Jahre, 75 kg).
Für den vorgestellten Vergleichstest wurden zwei Prothesenfüße verwendet. Der erste Prothesenfuß wird in der Aktivitätskategorie 3 bis 4 aufgeführt (Proteor 1A400 Dyna C, Größe 27-links, Proteor, St Apollinaire/Frankreich), und verfügt über einen vollständigen Kompositaufbau.
Der zweite verwendete Prothesenfuß entspricht der Kategorie 2 bis 3 (Uniprox F80, Größe 27-links, Uniprox GmbH & Co. KG, Zeulenroda-Triebes/Deutschland) und verfügt über ein gummigelagertes Multiaxialgelenk.
Für einen vergleichbaren Reibungskoeffizienten und zur Gewährleistung einer minimalen Beeinflussung der Prothesenfußcharakteristik wurden die Tests mit einem Minimalschuh Vivobarefoot Evo 2, Gr. 43 (Vivobarefoot ™ Ltd., London/UK) durchgeführt.
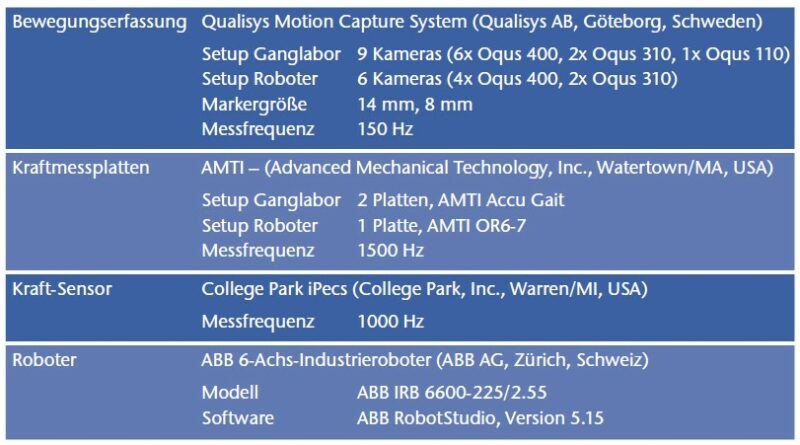
Technische Ausrüstung
Die Versuche wurden mit folgender messtechnischer Ausstattung durchgeführt (siehe Tab.1):
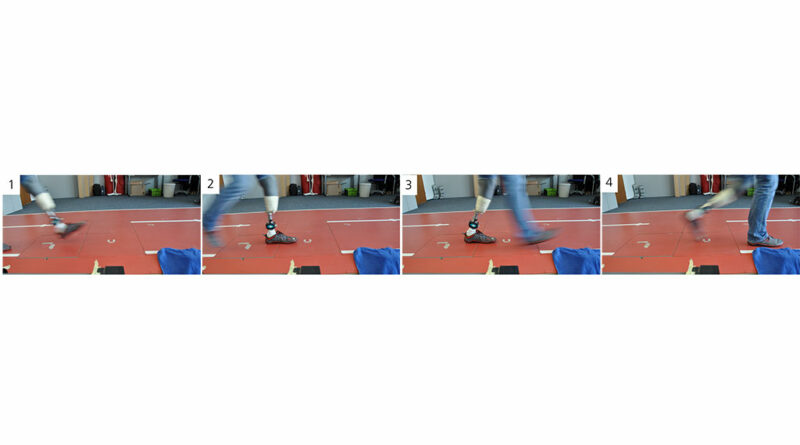
Probanden-Test im Ganglabor
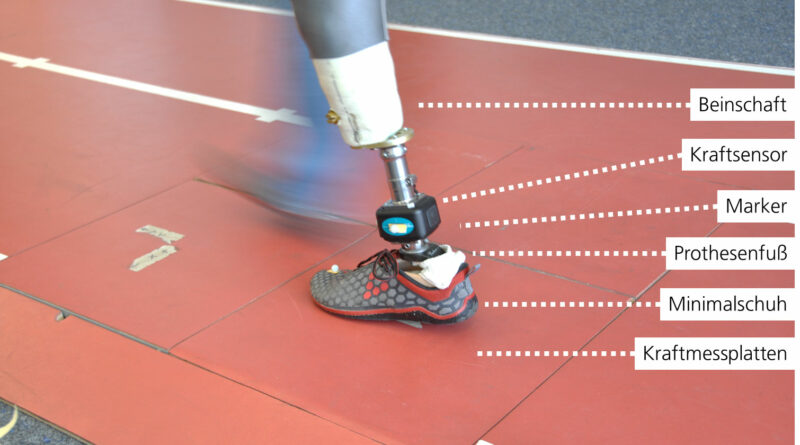
Für die Messung wurde die Prothese nach einem vordefinierten Modell bemarkert (Abb. 1). Das Marker-Modell ermöglicht der Software des Kamerasystems die automatisierte Berechnung der Orientierung und Positionierung der Prothese im Koordinatensystem des Bewegungslabors. Nach mindestens 10 erfolgreichen Schritten einer selbstgewählten Geschwindigkeit des Probanden werden die Ergebnisse als brauchbar gewertet und für die Weiterverarbeitung verwendet.
Es wurde ein einzelner, optimal getroffener Schritt für die Übertragung auf den Roboter verwendet, um ein zu starkes Glätten der Kurven beim Überlagern verschiedener Messdaten zu vermeiden.
Datenverarbeitung und Roboter-Programmierung
Die Weiterverarbeitung sowohl der Bewegungsdaten als auch der dazugehörigen Kraftwerte erfolgt im Post-Processing unter Verwendung von MATLAB (Version R2012b). Hauptaufgabe des MATLAB-Scripts ist der Abgleich des Roboterkoordinatensystems mit dem Koordinatensystem des Bewegungslabors. Des Weiteren wird die Orientierung eines Effektors in der Robotik (z. B. ein Werkzeug, eine Lackierdüse o. Ä.) als Quaternion, die Orientierung der Prothese in der Motion-Capture-Software aber durch Euler-Winkel oder als Rotationsmatrix dargestellt. Eine entsprechende Transformation ist ebenfalls Teil des Post-Processing.
Zusätzlich werden Tests auf die Plausibilität der Ausrichtung der verschiedenen Koordinatensysteme durchgeführt, um eine spätere korrekte Umorientierung der Prothese am Roboter gewährleisten zu können. Weiterhin werden neben den Bewegungstrajektorien sowohl die Kraft- und Momentenwerte der Kraftmessplatten als auch des mobilen Kraftsensors aufbereitet und in Form standardisierter Grafen dargestellt.
Im Anschluss können die aufbereiteten Daten direkt in die Simulationssoftware des Roboters eingespielt werden (ABB RobotStudio), um eine weitere Prüfung der korrekten Orientierung aller Achsen gewährleisten zu können. Auch lassen sich hierdurch bereits im Vorfeld Probleme erkennen und beheben, z. B. Singularitäten der Roboterachsen (Mehrfachlösungen in der Bestimmung der Roboter-Gelenkwinkel führen zum Abbruch der Bewegungsdurchführung) oder ungünstige Rotationsbewegungen einzelner Achsen, die zur Reduktion der Bewegungsgeschwindigkeit führen (Abb. 2).
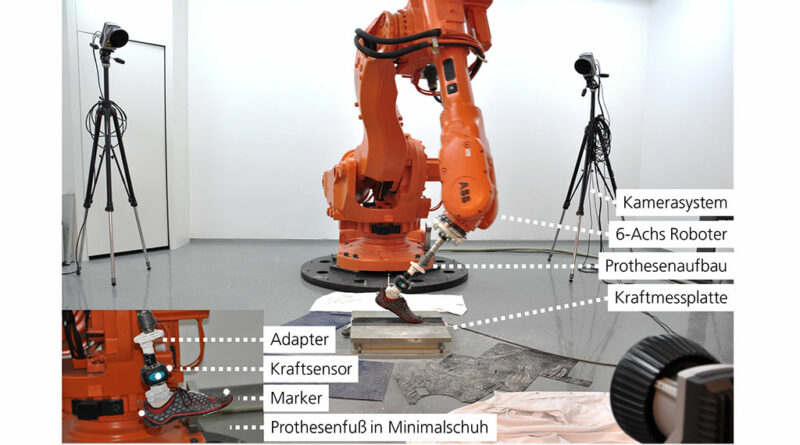
Als vorletzter Schritt werden die nun bewerteten Daten auf den Roboter (ABB IRB 6600–225) überspielt und die Prothese entsprechend den Einstellungen des Probanden-Tests am Roboter befestigt.
Im Verlauf des Einmessens werden Parameter wie die genaue Lage des Rotationszentrums des Prothesenaufbaus feinjustiert und die Trajektorie manuell in Richtung Boden nahjustiert, bis die Kraftwerte in etwa mit denen der Ganganalyse übereinstimmen. Im Anschluss werden mindestens 10 Schritte mit der gleichen Trajektorie aufgezeichnet.
Untersuchung am Roboter
Die Prothesen wurden am 4‑Loch-Adapter unterhalb der Kraftmessdose vom Aufbau getrennt. Somit konnte die Einstellung der Prothesen für den Übertrag auf den Roboter erhalten bleiben. Die Marker zur Erfassung der Trajektorie befanden sich auf der Kraftmessdose. Für den Aufbau am Roboter wurde versucht, dem realen Aufbau möglichst weitgehend zu entsprechen; somit wurde die Verschiebung von Unterschenkel zu Prothesen mit berücksichtigt.
Der Roboter ist ein als System am Boden befestigter Arm, der Kräfte und Momente auf die Prothese überträgt. Daher werden ohne Entkopplung des Systems auch Zwangskräfte auf den Prüfling übertragen. Um diesem Umstand entgegenzuwirken, wurde ein Rotationsadapter (Wagner Polymertechnik 2W054) ins System integriert. Der aus der Ganganalyse ausgewählte, bearbeitete und in Simulation validierte Schritt wird auf den Roboter überspielt. Die Durchführung erfolgt zunächst etwas erhöht und ohne Last über der Kraftmessplatte. Anschließend wird diese Höhe schrittweise reduziert, bis an der Kraftmessplatte in etwa die gleichen Kräfte wie in der Ganganalyse gemessen werden.
Im Rahmen der Versuche wurden auch verschiedene Bodenbeläge von rau (Schmirgelpapier) bis glatt (PVC-Bodenbelag) untersucht, um etwaige Abweichungen aufgrund von Reibung und Gleiten ausschließen zu können.
Ergebnis
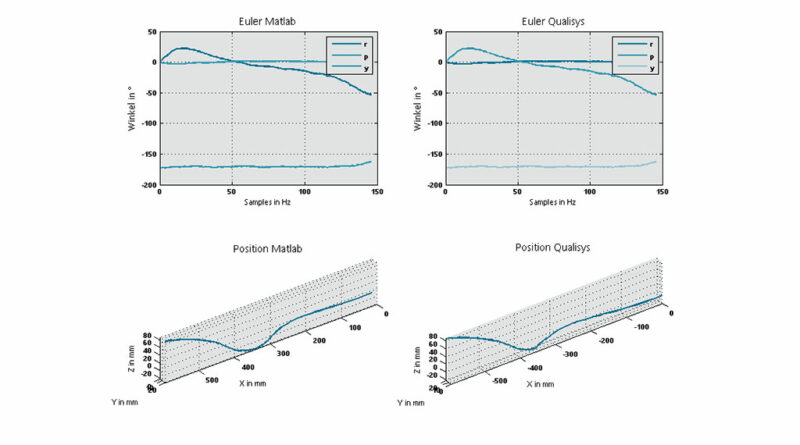
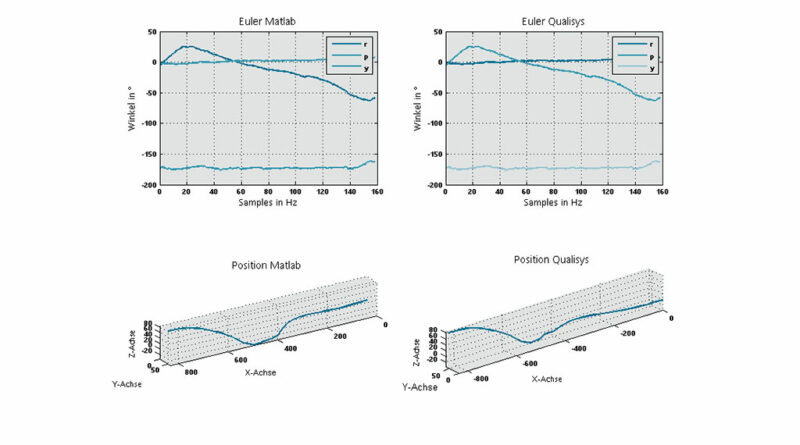
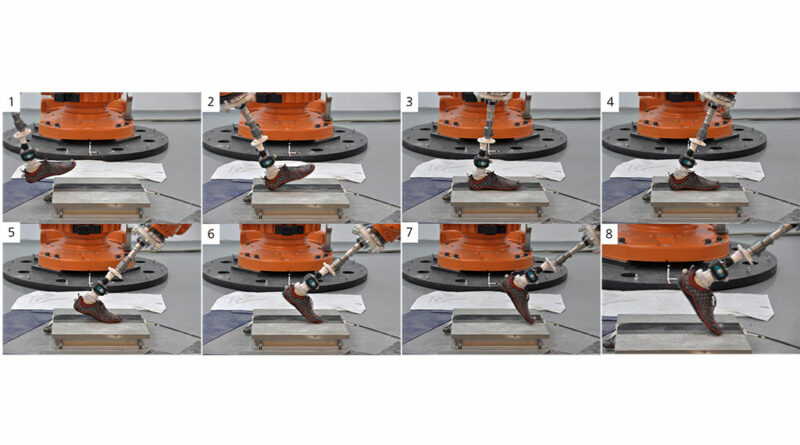
Die Übertragung der Daten aus dem Ganglabor in das Roboterkoordinatensystem und die damit einhergehende Positionierung und Orientierung der Prothesenfüße durch den Roboter erfolgte mit nur geringen Abweichungen. Sowohl für den DynaC (Abb. 3) als auch den F80 (Abb. 4) konnte die Konvertierung automatisiert durchgeführt werden. Die Simulation in RobotStudio (Abb. 5) sowie die reale Test-Durchführung am Roboter (Abb. 6) konnten die Bewegung aus dem Ganglabor reproduzieren.
Jedoch ließen sich mit den ursprünglichen Bewegungsdaten nicht exakt die gleichen Kraft- und Momentverläufe des Probanden reproduzieren. Daher wurde im nächsten Iterationsschritt eine manuelle Anpassung der Positions- und Winkeldaten durchgeführt, um eine größtmögliche Übereinstimmung der Kraft- und Momentenwerte aus den Probandenversuchen zu erreichen.
Im Folgenden werden die Messdaten nach manueller Anpassung aufgeführt und die Ergebnisse aus Ganglabor- und Robotertest vergleichend dargestellt.
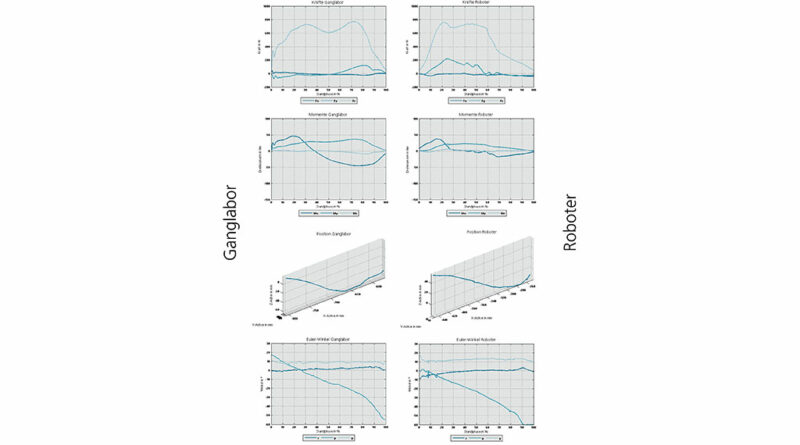
Prothesenfuß 1: DynaC
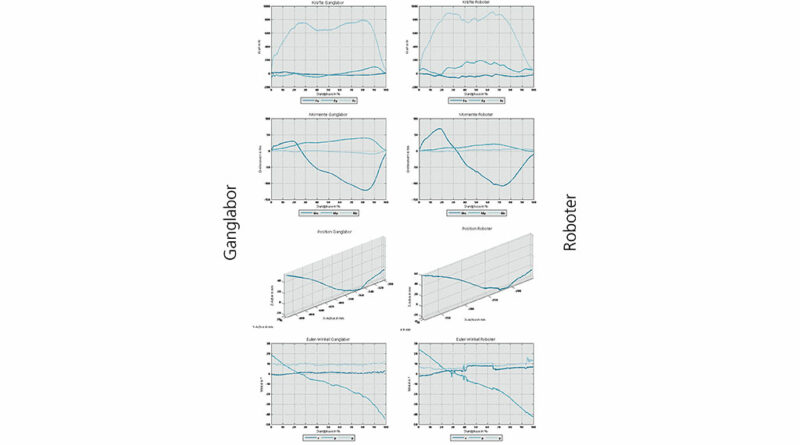
Beim ersten Versuch mit dem dynamischen Prothesenfuß DynaC kann zunächst beim Vergleich von Ganglabor- und Roboter-Kraftkurven eine generell höhere vertikale Belastung des Fußes in Fz (+200 N) sowie eine deutlich erhöhte und veränderte Kraftkurve in Fy (seitliche Schubkraft in der Frontalebene) festgestellt werden. Auch sind die Momente in der Sagittalebene verändert und weisen auf eine veränderte Belastung hin. Beim Vergleich der Bewegungsdaten (3D-Position und Winkel) fällt ein Sprung in der mittleren Standphase auf, der jedoch dem Bewegungserfassungssystem zuzurechnen ist (Abb. 7).
Prothesenfuß 2: F80
Im Gegensatz zu den Versuchen mit DynaC fällt bei den Roboterversuchen mit dem F80 auf, dass die Bodenreaktionskraft nicht mehr die typische Verlaufsform aufweist. Die vertikale Kraftkomponente Fz ist betragsmäßig vergleichbar mit dem Probandenversuch. Jedoch weicht auch Fy in diesem Versuch von den Messwerten aus dem Ganglabor ab. Der Verlauf der Momente unterscheidet sich ab der initialen Standphase ebenfalls (Abb. 8).
Diskussion
Im Rahmen der Arbeit konnte gezeigt werden, dass der Übertrag von Mensch auf Roboter über die Bewegungsdaten aus der Ganganalyse funktioniert und die individuellen Charakteristika des jeweiligen Testobjekts dargestellt werden können. Insbesondere bei der Genauigkeit von Position und Orientierung der Prothese über die Zeit konnten erhebliche Verbesserungen erzielt werden.
Das Verfahren der Umrechnung wurde erfolgreich robuster gestaltet, so dass Fehler in der Orientierung einzelner Achsen nun vermieden werden können.
Der hohen Zahl an durchführbaren Testszenarios am Roboter steht eine reduzierte Geschwindigkeit bei der Prüfung aufgrund zu geringer Achsengeschwindigkeiten gegenüber.
Die aufgezeichneten Kraftkurven sind ähnlich, jedoch nicht mit denen der Ganganalyse identisch, was auf eine Summation von Fehlern in der Ausrichtung der Prothesen beim Übertrag vom Proband auf den Roboter und bei der manuellen Anpassung der Bewegungsdaten am Roboter zurückzuführen ist.
Somit fehlt für ein qualitativ hochwertiges und vergleichbares Ergebnis ein weiteres Hilfsmittel am Roboter, das diese Problemstellen behebt. Als probates Mittel konnte eine Kraftsteuerung seitens des Roboters identifiziert werden, die im nächsten Entwicklungsschritt in die Testumgebung integriert werden wird. Somit können die Positionsdaten des Roboters anhand der zu erwartenden Kraft- und Momentenwerte automatisiert nachreguliert werden.
Langfristiges Ziel ist die Erstellung einer Bewegungsdatenbank, die typische Belastungs- und Bewegungscharakteristika aus dem Alltag entsprechend unterschiedlicher Anwendergruppen abbildet und für automatisierte Tests während des Entwicklungszyklus zur Verfügung steht. Hierunter fallen zum Beispiel Treppensteigen oder Bergauf-/Bergab-Gehen. Zusätzlich ermöglicht die Simulation des Ganges am Roboter den Test adaptiver und elektronischer Prothesenpassteile, die für eine korrekte Steuerung auf physiologische Gangparameter angewiesen sind, die mithilfe interner Sensoren gemessen werden. Dies ist mit heutigen standardisierten Testverfahren noch nicht möglich.
Für die Autoren:
Dipl.-Ing. Felix Starker
Fraunhofer-Institut für Produktionstechnik
und Automatisierung
Biomechatronische Systeme
Nobelstraße 12
70569 Stuttgart
Felix.Starker@ipa.fraunhofer.de
Begutachteter Beitrag/Reviewed paper
Starker F, Dennerlein F, Blab F, Schneider U. Simulation des Prothesengangs mittels eines Sechs-Achs-Roboters. Orthopädie Technik, 2013; 64 (9): 36- 45
- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Deutsches Institut für Normung e. V. Prothetik. Prüfung der Struktur von Prothesen der unteren Gliedmaßen. Anforderungen und Prüfverfahren. ISO/DIS 10328. 2004 (ISO 10328). Berlin: Beuth-Verlag, 2004
- Gördes M, Boenick U. Prüfung von Prothesenkomponenten der unteren Gliedmaßen – Eine Erläuterung der neuen Normenvorschläge ISO/DIS 10328 und ISO/DIS 22675. Orthopädie-Technik, 2003; 10: 711–719
- Hansen AH, Childress DS, Knox EH. Prosthetic foot roll-over shapes with implications for alignment of trans-tibial prostheses. Prosthetics and Orthotics International, 2000; 24 (3): 205–215
- Aubin P, Cowley M, Ledoux W. Gait Simulation via a 6‑DOF Parallel Robot With Iterative Learning Control. IEEE Transactions on Biomedical Engineering, 2008; 55 (3): 1237–1240
- Monckton SP, Chrystall K. Design and development of an automated footwear testing system. IEEE International Conference on Robotics & Automation, Washington, D.C., 2002
- Wannop JW, Worobets JT, Stefanyshyn DJ. Footwear traction and lower extremity joint loading. The American Journal of Sports Medicine, 2010; 38 (6): 1221–1228
- Ronkainen JA, El-Kati RF, Fleming PR, Forrester SE. Application of an industrial robot in the sports domain: simulating the ground contact phase of running. Proceedings of the Institution of Mechanical Engineers, Part P: Journal of Sports Engineering and Technology, 2010; 224 (4): 259–269
- Hipp J, Starker F, Dennerlein F. Natural prosthetic gait with a 6‑DOF articulated robot. World Congress Orthopädie + Reha-Technik 2012, Leipzig. Online: http://publica.fraunhofer.de/dokumente/N‑205495.html
- Dennerlein F, Starker F. Bewegungsmessung für funktionelle Prothesentests – „Gait to Robot“. In: Verl A (Hrsg.). Bewegungsmessung in der Orthopädietechnik: Aktuelles und Trends aus Forschung und Praxis (S. 8–20). Online: http://publica.fraunhofer.de/documents/N‑221458.html, Stuttgart: Fraunhofer IPA, 2012
- Dennerlein F, Starker F, Schneider U. Bioengineering für fortschrittliche Prothetik. 56. Jahrestagung der FOT 2012, Berlin. Online: http://publica.fraunhofer.de/documents/N‑221457.html
