Einleitung
Für die Analyse und Bewertung von Prothesenfüßen stehen verschiedene messtechnische Verfahren zur Verfügung. Prinzipiell werden zwei Methoden unterschieden: einerseits Messreihen mit Testpersonen, um kinetische und kinematische Daten zu erheben, andererseits anwenderunabhängige, mechanische Prüfverfahren, die mit Hilfe spezieller Prüfstände erfolgen. Beide Wege ermöglichen es, den Roll over shape (ROS) von Prothesenfüßen zu messen. In dieser Untersuchung wird geprüft, ob die Ergebnisse der unterschiedlichen Messmethoden vergleichbar sind. Darüber hinaus wird untersucht, inwieweit die Ergebnisse des Prüfstandstests für die Auslegung von Prothesenfüßen in der Fußentwicklung genutzt werden können.
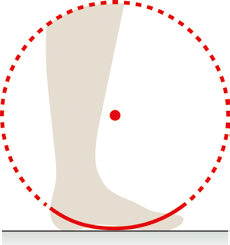
Der Roll over shape (ROS) bezeichnet die effektive Abrollkurve eines Fußes während der Standphase 1 2. Hansen 3 führt dies als eine der wichtigsten Eigenschaften von Prothesenfüßen auf. Der Verlauf des Druckmittelpunktes (CoP), bezogen auf das lokale Fußkoordinatensystem, vom Fersenkontakt bis zur Zehenablösung ergibt die ROS-Kurve. Oft wird dieser Verlauf mit dem Abrollen eines Rades verglichen (Abb. 1) 4 5 6. Der ROS gibt Aufschluss darüber, wie sich ein Prothesenfuß während der Belastungsphase verformt 7 8 9. Der Hauptvorteil dieses Verfahrens liegt darin, dass Ergebnisse des komplexen Sprunggelenk-Fuß-Systems direkt und einfach miteinander verglichen werden können.
Das Abrollverhalten lässt sich anhand unterschiedlichster Messgrößen vergleichen. In diesem Artikel wird es durch den von Curtze et al. 10 definierten Momentanradius analysiert. Der Momentanradius wird herangezogen, um eine Aussage über die Standstabilität des Fußes in der entsprechenden Position zu treffen. Ein kleiner Radius bedeutet weniger, ein großer Radius mehr Stabilität.
In der klassischen Ganganalyse werden alle Messdaten mit Hilfe von Testpersonen unter Laborbedingungen erhoben. Dies erfordert eine hohe Zahl von Testpersonen, um die intraindividuellen Gangmuster zu erfassen, ein statistisches Mittel zu erreichen und gegebenenfalls Ausreißer zu erkennen. Jeder natürliche Organismus ist darauf ausgelegt, sich permanent an die äußeren Gegebenheiten anzupassen. Das Gleiche geschieht beim Einsatz unterschiedlicher Passteile: Die Testperson passt sich über Kompensationsbewegungen an. Um diese Bewegungen zu erfassen, müssen der Fokus der Betrachtung erweitert und die Testperson beziehungsweise die folgenden Glieder der kinematischen Kette analysiert werden. Ein weiterer Punkt, der die Auswertung erschwert, ist der individuelle Aufbau der Prothese. Mit modernen Aufbauhilfen können die Vorgaben der Hersteller zwar überprüft werden, Abweichungen sind aufgrund der individuellen Anwendergegebenheiten jedoch nicht ausgeschlossen.
Spezielle Prüfmaschinen dienen dazu, reproduzierbare Messungen an Prothesenpassteilen durchzuführen. Klassisch werden hier zyklische und statische Festigkeiten nach den Normen DIN ISO EN 10328 und DIN ISO EN 22675 abgeprüft. Zusätzlich ist es möglich, Verformung, Dämpfung, Energierückgabe und Abrollverhalten in speziellen Prüfständen zu analysieren. Um die Daten zu interpretieren, werden Vergleiche zur Ganganalyse herangezogen. Sie ermöglichen eine Bewertung der tatsächlichen Leistungsfähigkeit und der Eignung für den Anwender.
Methode
Ganganalyse
Prüfaufbau
An der ganganalytischen Studie nahmen vier männliche Testpersonen (Alter: 52 ± 19, Größe: 176 ± 4 cm, Gewicht: 76 ± 11 kg; Amputationsursachen: 3 × Trauma, 1 × Dysmelie; Mobilitätsgrade: 2–4; Fußlängen: 26– 27 cm) nach Unterschenkelamputation teil. Die objektiven Daten wurden mittels optokinetischer und kinematischer Ganganalyse (Highspeed-Kamera: Pilot piA640-210gc, Basler, 200 Hz; Kraftmessplatte: AkkuGait, AMTI, 200 Hz) erhoben.
Messablauf
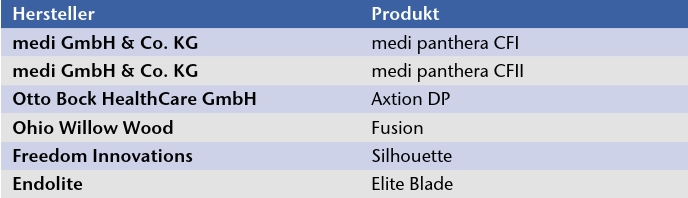
Alle Testpersonen wurden in zufälliger Reihenfolge mit sechs verschiedenen Carbonfüßen unterschiedlicher Hersteller (Tab. 1) versorgt. Um den Einfluss des Schuhwerks zu minimieren, erfolgten alle Messungen mit identischen Neutralschuhen. Der Neutralschuh ist ein einfacher Schnürschuh mit flexiblem Obermaterial und einer 15 Millimeter dünnen Sohle. Der Schuh soll die Dämpfung und die Verformung des Prothesenfußes möglichst wenig einschränken bzw. verändern. Nach einer Eingewöhnungszeit von 15 Minuten begann die Erhebung objektiver Ganganalysedaten. Zur Mittelwertbildung wurde jede Messung fünfmal wiederholt.
ROS-Prüfstand
Prüfaufbau
Der ROS-Prüfstand wurde nach der Vorlage aus der Veröffentlichung von Curtze et al. 11 modifiziert und aufgebaut. Er besteht aus einem Rahmen, der fest mit dem Untergrund verschraubt wird (Abb. 2). Dieser Rahmen dient als Führung für eine Konstruktion aus Rohren. Am oberen Ende werden Gewichte und am unteren Ende der zu messende Prothesenfuß angebracht. Der Fuß ist parallel zur Führungsschiene ausgerichtet. Direkt oberhalb des Fußes befindet sich ein Justieradapter zur Gewichtspositionierung. Der Prüfstand wird auf einer Kraftmessplatte (AkkuGait, AMTI, 200 Hz) positioniert, um die Kräfte und den Verlauf des Druckmittelpunktes aufzunehmen. Zur Ermittlung des lokalen Fußkoordinatensystems verfolgt eine Highspeed-Kamera (Pilot piA640-210gc, Basler, 200 Hz) speziell positionierte Marker.
Messablauf
Zur Simulation der Körpermasse wird ein Gewicht von 85 Kilogramm in einer Höhe von 98 Zentimetern angebracht. Dies entspricht der Beinlänge einer Person mit einer Körpergröße von 180 Zentimetern 12. Die Belastungslinie des Gewichts wird über den Justieradapter mit der Aufbaubezugslinie in Deckung gebracht. Nachdem die Kraftmessplatte kalibriert ist, wird die Messung gestartet. Der Fuß wird nach hinten (in die Ausgangslage) und anschließend innerhalb der Führungsschienen gleichmäßig in der Sagittalebene nach vorne bewegt. Der Prothesenfuß durchläuft einen vollständigen Abrollvorgang mit einem Bewegungsumfang von –20° bis +40° (Abb. 3). Jede Messung erfolgt dreimal, aus den gewonnenen Daten wird der Mittelwert berechnet.
Datenanalyse
Vereinfacht gesagt verhält sich ein Prothesenfuß während des Abrollvorgangs wie ein rollendes Rad (siehe Abb. 1). Vorangehende Publikationen 13 14 haben gezeigt, dass der Krümmungsradius nicht konstant ist. Aus diesem Grund wird der Radienverlauf berechnet und analysiert. Zur Analyse des Radienverlaufs wird zu jedem Zeitpunkt der entsprechende Momentanradius berechnet. Er ist als die erste Ableitung des Druckmittelpunktes zum Winkel definiert 15:
Die Werte des Momentanradius werden auf die Fußlänge skaliert und sind daher dimensionslos. Dies ermöglicht einen einfacheren Vergleich unterschiedlicher Fußgrößen.
Ergebnisse
Ganganalyse
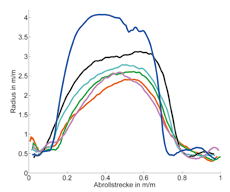
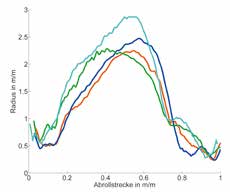
Alle gemessenen Prothesenfüße weisen im mittleren Drittel einen größeren Radius auf als im Fersen- und Ballenbereich (Abb. 4). Bei vier von sechs Füßen nimmt der Momentanradius bis zum Maximum gleichmäßig zu und anschließend gleichmäßig ab, ohne ein Plateau im Bereich des Maximums auszubilden. Die Steigungen der Kurven zeigen Unterschiede in der Geschwindigkeit der Radienänderung auf. Füße, die ein Plateau ausbilden, zeigen einen schnellen Übergang zwischen großem und kleinem Radius. Bei vier Füßen erfolgt die Zunahme des Momentanradius deutlich langsamer als die Abnahme. Die Werte für den maximalen Momentanradius liegen bei fünf Füßen zwischen 2,3 und 3,1. Bei einem Fuß liegt der maximale Momentanradius bei einem Wert von ca. 4 und bildet dort ein Plateau aus.
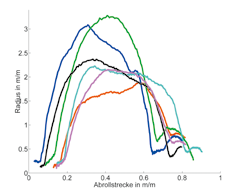
Unterschiede in der Abrollkurve können auch bei verschiedenen Testpersonen mit gleichem Fußpassteil beobachtet werden. In der Grafik oben sind beispielhaft die anwenderbezogenen Abrollkurven für ein Fußpassteil dargestellt (Abb. 5).
Prüfstand
Die Prüfstandstests ergeben, dass alle Füße im mittleren Drittel einen größeren Radius als im Fersen- und Ballenbereich aufweisen (Abb. 6). Bei vier von sechs Füßen nimmt der Momentanradius bis zum Maximum gleichmäßig zu. Anschließend verharrt der Momentanradius für eine gewisse Zeit im Bereich des Maximums, bevor er wieder gleichmäßig abnimmt. Die Werte des maximalen Momentanradius betragen zwischen 1,8 und 2,4. Bei zwei Füßen liegt der maximale Momentanradius über einem Wert von 3.
Vergleich
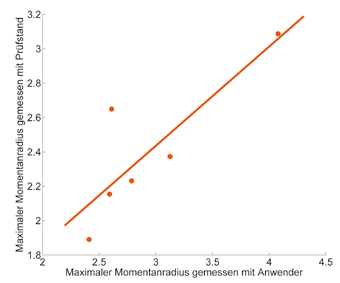
Beim Vergleich der Kurven aus der Ganganalyse und den Prüfstandstests fallen Ähnlichkeiten, aber auch Unterschiede auf. Die Kurven aus dem Prüfstand zeigen überwiegend einen trapezförmigen Verlauf, die Kurven aus der Ganganalyse überwiegend einen runden Verlauf. Füße mit einem großen maximalen Momentanradius in der Ganganalyse haben diesen auch in den Prüfstandsresultaten (Abb. 7).
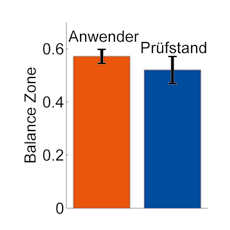
In verschiedenen Studien 16 17 wurde die effektive Fußlänge und deren Einfluss auf den Gang untersucht. Hierbei wurde die effektive Fußlänge über die Distanz zwischen der Ferse und dem Ende der ROS-Kurve definiert. Im Unterschied dazu wird in dieser Untersuchung der Bereich analysiert, in dem der Fuß einen Momentanradius über dem Wert 1 aufweist. Dieser Bereich wird im Folgenden als „Balance-Zone” bezeichnet. Hintergrund ist die Annahme, dass an dieser Stelle – über eine kleine Winkeländerung des Unterschenkels – eine große CoP-Änderung stattfindet. Der Anwender hat somit die Möglichkeit, die Balance zu halten 18. Dabei zeigt sich, dass die gemessene Balance-Zone bei den Testpersonen tendenziell größer ist als beim Prüfstand (Abb. 8).
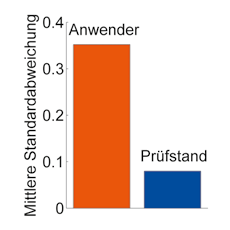
Im Vergleich der mittleren Standardabweichung der Momentanradien beider Messprinzipien zeigen sich deutliche Unterschiede: Die Prüfstandsmessung weist eine deutlich geringere Standardabweichung auf (Abb. 9).
Diskussion
Die Resultate der beiden Messprinzipien unterscheiden sich in vielen Bereichen wie zum Beispiel in der Balance-Zone. In anderen Bereichen, wie beispielsweise dem maximalen Momentanradius, zeigen sich Ähnlichkeiten. Da das Messprinzip großen Einfluss auf die Ergebnisse hat, ist bei der Interpretation beziehungsweise dem direkten Vergleich verschiedener ROS-Studien Vorsicht geboten.
Als Gründe für die abweichenden Resultate bei den maximalen Momentanradien und der Balance-Zone kommen verschiedene Ursachen in Frage, zum Beispiel die Verwendung eines Neutralschuhs oder die Positionierung des Prothesenfußes. Zudem zeigt die Vertikalkraft bei der Ganganalyse eine Doppelhöckerkurve. Bei den Prüfstandstests ist die Vertikalkraft eher konstant.
Die personenspezifischen Abrollkurven können ebenfalls verschiedene Ursachen haben: Die Testpersonen unterscheiden sich sowohl in ihrem Gewicht als auch in ihrem persönlichen Gangmuster. Durch die somit abweichende Krafteinleitung in den Fuß differenziert sich auch die daraus resultierende Verformung des Fußes.
Obwohl sich die Resultate der beiden Untersuchungsmethoden unterscheiden, können aus den Prüfstandsdaten wertvolle Informationen für die Fußentwicklung gewonnen werden. Da die mittlere Standardabweichung bei den Prüfstandsergebnissen deutlich geringer ist, können kleinere Unterschiede zwischen den Prototypen erkannt werden.
In der Prothesenfußentwicklung muss für jede Größe und Gewichtskategorie das Verformungsverhalten des Fußes überprüft und gegebenenfalls angepasst werden. Um das Verformungsverhalten ganganalytisch zu untersuchen, werden in jeder Gewichtskategorie und Größe mehrere Testpersonen benötigt. Dies stellt in den Randgrößen eine Herausforderung dar. Ein Lösungsansatz ist, die Prüfung mit dem beschriebenen Prüfstand durchzuführen. Der zu entwickelnde Prothesenfuß wird hierbei in einer mittleren Größe und Gewichtskategorie ganganalytisch untersucht. Wenn die objektiven Ergebnisse und das subjektive Empfinden der Testpersonen positiv sind, wird der Prothesenfuß im Prüfstand gemessen und die entsprechende Prüfstands-Sollkurve generiert. Um die Sollkurve für alle Größen anzuwenden, wird sie auf die Fußlänge skaliert. Die Messresultate der unterschiedlichen Kategorien und Größen können nun mit der Sollkurve direkt verglichen werden. Somit kann sichergestellt werden, dass bei jeder Kategorie und Größe ein harmonisches Abrollverhalten besteht.
Für die Autoren:
Dipl.-Ing. (FH) Gabriel A. Tschupp
F&E Orthopädie
Medi GmbH & Co. KG
Medicusstraße 1
95448 Bayreuth
g.tschupp@medi.de
Begutachteter Beitrag/reviewed paper
Tschupp GA, Nissels V, Uhlig J. Roll over shape-Messung: Vergleich zweier Messmethoden und Anwendbarkeit in der Prothesenfußentwicklung. Orthopädie Technik, 2014; 65 (12): 24–28




- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Hansen AH. Roll-over Characteristics of Human Walking With Applications for Artificial Limbs. Dissertation Evanston: Northwestern University, 2002
- Hansen AH, Childress DS, Knox EH. Roll over shapes of human locomotor systems: effects of walking speed. Clinical Biomechanics, 2004; 19 (4): 407–414
- Hansen AH. Roll-over Characteristics of Human Walking With Applications for Artificial Limbs. Dissertation Evanston: Northwestern University, 2002
- Hansen AH. Roll-over Characteristics of Human Walking With Applications for Artificial Limbs. Dissertation Evanston: Northwestern University, 2002
- Hansen AH, Childress DS, Knox EH. Roll over shapes of human locomotor systems: effects of walking speed. Clinical Biomechanics, 2004; 19 (4): 407–414
- Adamczyk PG, Collins SH, Kuo AD. The advantages of a rolling foot in human walking. Journal of Experimental Biology, 2006; 209 (Pt 20): 3953–3963
- Hansen AH. Roll-over Characteristics of Human Walking With Applications for Artificial Limbs. Dissertation Evanston: Northwestern University, 2002
- Hansen AH, Childress DS, Knox EH. Roll over shapes of human locomotor systems: effects of walking speed. Clinical Biomechanics, 2004; 19 (4): 407–414
- Adamczyk PG, Collins SH, Kuo AD. The advantages of a rolling foot in human walking. Journal of Experimental Biology, 2006; 209 (Pt 20): 3953–3963
- Curtze C, et al. Comparative roll-over analysis of prosthetic feet. Journal of Biomechanics, 2009; 42: 1746–1753
- Curtze C, et al. Comparative roll-over analysis of prosthetic feet. Journal of Biomechanics, 2009; 42: 1746–1753
- Curtze C, et al. Comparative roll-over analysis of prosthetic feet. Journal of Biomechanics, 2009; 42: 1746–1753
- Curtze C, et al. Comparative roll-over analysis of prosthetic feet. Journal of Biomechanics, 2009; 42: 1746–1753
- Tschupp GA. Zusammenhang zwischen Roll over shape und CoP-Geschwindigkeit bei Prothesenfüßen. Posterpräsentation anlässlich der OTWorld 2014 in Leipzig (Poster beim Verfasser)
- Curtze C, et al. Comparative roll-over analysis of prosthetic feet. Journal of Biomechanics, 2009; 42: 1746–1753
- Hansen AH, et al. The Effects of Prosthetic Foot Roll-Over Shape Arc Length on the Gait of Trans-Tibial Prosthesis Users. Prosthetics and Orthotics International, 2006; 30: 286–299
- Hansen AH, Sam M, Childress DS. The Effective Foot Length Ratio: A Potential Tool for Characterization and Evaluation of Prosthetic Feet. Journal of Prosthetics & Orthotics, 2004; 16 (2): 41–45
- Winter DA. Human balance and posture control during standing and walking. Gait & Posture, 1995; 3: 193–214
