Orthesensysteme, die nur die pathologische Bewegungsrichtung freigeben und das Ziel verfolgen, neben einer vollständigen Korrektur den Fuß nicht in der physiologischen Beweglichkeit über die Maße einzuschränken, lassen sich sogar schon in älterer Literatur finden1. In Anbetracht dieser historischen und dennoch fortschrittlichen Orthesentechnik ist es schwer zu glauben, dass es bis heute nur sehr wenige korrigierende Orthesen gibt, die über diese bereits vor vielen Jahren genutzten Prinzipien hinausgehen. Obwohl die moderne Werkstofftechnik neue Materialien zur Verfügung stellt und die Fortschritte in der funktionellen Anatomie bessere Korrekturmechanismen von Fehlstellungen ermöglichen, schränken selbst aktuelle Orthesen den Fuß oft mehr ein, als es für eine Stabilisierung oder Korrektur notwendig ist.
Eine Patientengruppe, die oft orthetisch aufgrund von Fußfehlstellungen wie zum Beispiel eines Spitzfußes versorgt wird, stellt die Betroffenen der Zerebralparese (CP) dar. Dabei sind Unterschenkelorthesen die am häufigsten verwendeten Orthesen bei einer CP-Diagnose2. Patienten mit einer CP verfügen oft über eine schwache Willkürmotorik bei gleichzeitigen spastischen Lähmungen verschiedener Muskelgruppen. Dennoch sind viele Patienten gehfähig und können sich auf unebenem Gelände frei bewegen. Die Einschränkung des Fußkomplexes durch eine Orthese, die über eine vollständige Korrektur der Fehlstellung hinausgeht, wurde bisher durch physiotherapeutische Maßnahmen minimiert, vermindert jedoch die Adaptation des Fußes beim Gehen im unebenen Gelände.
Bis heute sind keine Orthesensysteme bekannt, die eine vollständige und mehrdimensionale Spitzfußkorrektur sicherstellen, ohne den Fuß in seiner frontalen Anpassbarkeit auf unebenem Untergrund zu behindern. Infolgedessen wird in dieser Arbeit ein neu entwickeltes Orthesensystem nach Baise/Pohlig ganganalytisch untersucht, welches potentiell zur Spitzfußkorrektur bei einer CP eingesetzt werden soll und dem Fuß bei gleichbleibender Korrekturwirkung eine größere frontale Bewegungsfreiheit in die nicht pathologische Bewegungsrichtung erlauben kann, um die Adaptationsfunktion des Fußes auf unebenem Untergrund in die physiologische Bewegungsrichtung zu erhalten.
Einleitung
In dieser Studie sollen spezifische Eigenschaften des dynamischen Stabilitätsträgers in Verbindung mit einer Unterschenkelorthese nach Baise/Pohlig zur Versorgung von spastischen Spitzfüßen ganganalytisch untersucht werden. Die Konstrukteure des dynamischen Stabilitätsträgers (DS) haben folgende Hypothesen:
- Der DS ermöglicht eine Adaptation des Fußes auf unebenem Untergrund in die physiologische Bewegungsrichtung der jeweiligen Fehlstellung in der Frontalebene (Inversion/Eversion), die über die flexiblen Eigenschaften einer unilateralen, jedoch ohne DS ausgestatteten Versorgung hinausgeht.
- Der dynamische Stabilitätsträger sperrt die frontale Adaptationsbewegung des Fußes (Inversion/Eversion) in die pathologische Richtung der jeweiligen Fehlstellung.
- Durch die Verwendung des DS erhöht sich nicht die Plantarflexion des Fußes im Gangzyklus.
Methoden
Teilnehmer
Zur Überprüfung der genannten Thesen wurde eine entsprechende Studie aufgesetzt. Um zur Teilnahme an der Studie eingeschlossen zu werden, also die im Folgenden beschriebenen Vorgaben des dynamischen Stabilitätsträgers zu erfüllen, mussten die Teilnehmer mit einer spastischen CP ein Körpergewicht zwischen 14 kg und 56 kg aufweisen. Weitere Einschlusskriterien waren eine GMFCS (Gross Motor Functions Classification System)-Klassifizierung I oder II, eine frei bewegliche frontale Beweglichkeit des Fußes und ein diagnostizierter sowie vollständig korrigierbarer Spitzknick-/-klumpfuß (min. Range of Motion (ROM) des oberen Sprunggelenkes (OSG) in Dorsalextension (DE) 0° bei gestrecktem Knie und korrigiertem unterem Sprunggelenk (USG)). Es wurden 5 mit einer spastischen/unilateralen CP diagnostizierte Kinder und 5 TD(typically developed)-Kinder als Referenzgruppe mit den in Tabelle 1 dargestellten anthropometrischen Daten eingeschlossen.
Es wurden demnach 2 Patientengruppen gebildet. Alle Probanden ohne CP-Diagnose (1–5) wurden in der Gruppe TD zusammengefasst. Die Probanden 6–9 wiesen eine spastische CP mit einem Spitzknickfuß auf und wurden unter der Gruppe CPFF (Cerebral palsy flat foot) zusammengefasst.
Der dynamische Stabilitätsträger
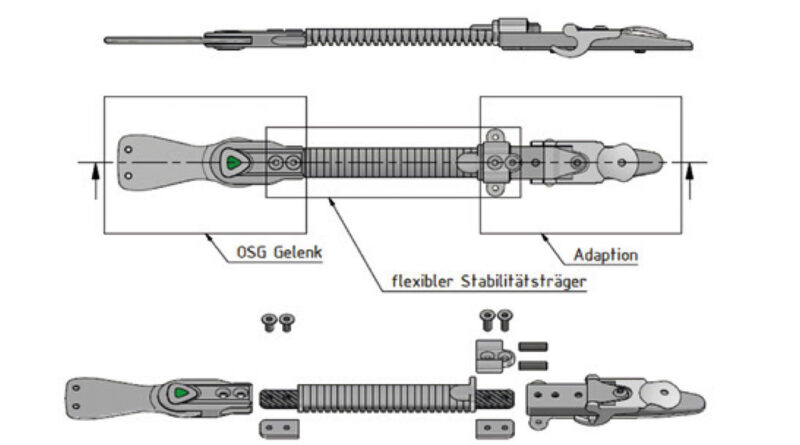
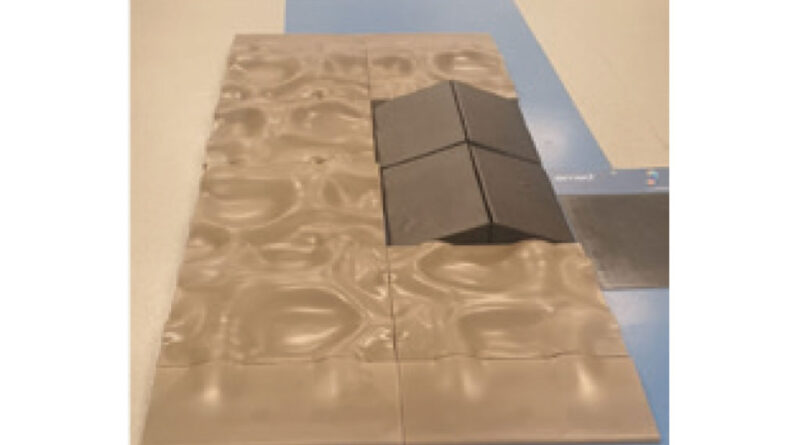
Der dynamische Stabilitätsträger (DS) ist zur Anwendung bei einem unilateralen Gelenksystems bei gehfähigen CP-Patienten entwickelt worden, die mindestens eine Gehfähigkeit von GMFCS II besitzen. Alle Grundvorrausetzungen, die für eine Therapie mit einer Unterschenkelorthese bei einem spastischen Spitzfuß gelten, sind ebenfalls bei der Indikationsstellung des DS anzuwenden. Die Konstruktion der verwendeten Unterschenkelorthese ändert sich nicht beim Einbau des DS (Abb. 1).
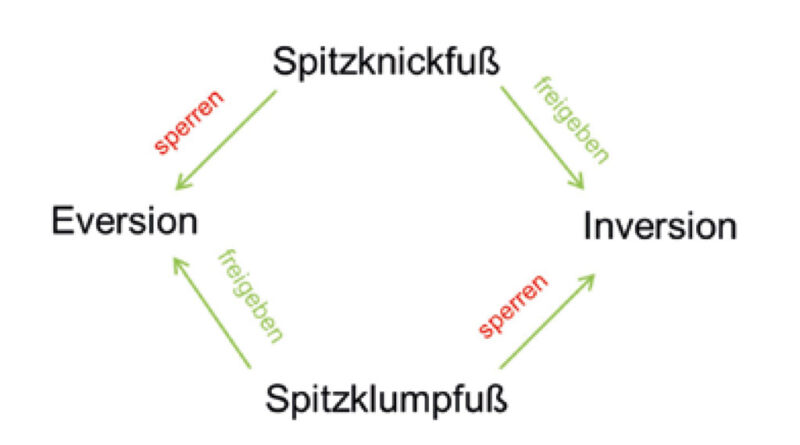
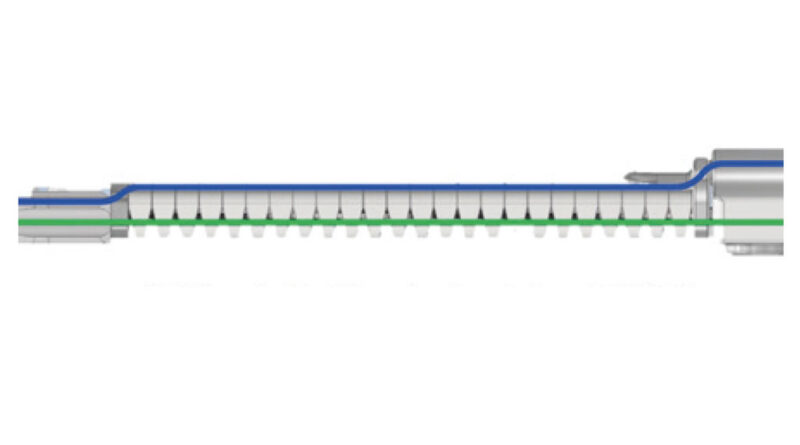
Der dynamische Stabilitätsträger hat das Ziel, die frontale Bewegung des Fußes in die physiologische Bewegungsrichtung freizugeben und die pathologische zu sperren (Abb. 2). Dies soll durch ein anisotropes Biegeverhalten erreicht werden, welches durch den flexiblen Carbonstab mit den dazugehörigen an der Innenseite eingekerbten Bauteilen umgesetzt wird (Abb. 3). Die anisotrope Flexibilität wird durch die Aluminiumbauteile erreicht, die auf den Carbonstab geschoben und dort passiv fixiert werden (Abb. 2). Bei einem Anwendergewicht unter 30 kg wurde ein 3 mm dicker Carbonstab und bei über 30 kg ein 4 mm dicker Carbonstab verwendet. Um eine Flexibilität in die gewünschte Richtung zu ermöglichen, sind die Aluminiumbauteile an der Innenseite so angeschliffen, dass eine Biegung zum Körper hin möglich ist. Auf der Außenseite sind diese hingegen auf Stoß gearbeitet, sodass eine Biegung des Carbonstabes in diese Richtung blockiert wird (Abb. 4). Des Weiteren kann der Widerstand in die pathologische Bewegungsrichtung erhöht werden. Der proximal direkt über den Klötzen angebrachte Anpresskopf (Abb. 3, 4) ermöglicht durch einen Schraubenmechanismus, den Anpressdruck zwischen den Aluminiumklötzen zu erhöhen und somit den Widerstand, der sich durch die vorhandenen Fertigungstoleranzen zu gering oder zu spät aufbauen kann, früher einsetzen zu lassen und zu verstärken. Somit wird der Biegewiderstand in die pathologische Richtung erhöht, es entsteht jedoch auch eine Vorspannung in die physiologische Bewegungsrichtung. Je nach Indikationsstellung wird der DS lateral bei einem Spitzknickfuß oder medial bei einem Spitzklumpfuß mit den Einschnitten zum Körper gerichtet, eingebaut. Somit wirken die Drehmomente hauptsächlich in die freigegebene Richtung, da sich die größte Fläche des Fußes medial bei einem Spitzknickfuß oder lateral bei einem Spitzklumpfuß befindet. Die auftretenden Drehmomente in die pathologische Richtung sollen durch die an der Außenseite auf Stoß gearbeiteten Aluminiumbauteile aufgefangen und der Fuß somit in dieser Bewegung limitiert werden. Der DS wird mit einem OSG-Gelenk und einer distalen Adaption als einziges Verbindungsstück zwischen der Unterhülse und dem Fußteil an einer unilateral geführten Unterschenkelorthese mit Ringfassung verbaut. Zum Zeitpunkt der Anfertigung dieser Arbeit liegt das zugelassene Körpergewicht zur Verwendung eines DS bei minimal 14 kg und maximal 56 kg.
Durchführung
Zur Erhebung der kinematischen und kinetischen Daten wurde ein Bewegungsanalysesystem der Firma Vicon (Vicon MX, Vicon Motion Systems Ltd., Oxford, UK) mit insgesamt 8 optoelektronischen Kameras vom Typ Bonita B10 (Vicon MX, Vicon Motion Systems Ltd., Oxford, UK), 2 piezoelektrische Kraftmessplatten der Advanced Mechanical Technology, Inc. (Watertown, Massachusetts/USA) auf einer Gehstrecke von 12 Metern verwendet. Die Erhebung erfolgte unter Benutzung des etablierten Markersets Oxford Foot Model (OFM), welches zur Evaluierung von Kinderfüßen geeignet ist3 4. Bei der Berechnung der Gelenkzentren werden die jeweiligen frontalen Breitenmaße verwendet, die durch eine Multiplikation mit 0,5 das frontale Gelenkzentrum des OSG oder des Knies bestimmen. In dieser Studie musste das angegebene OSG-Maß bei Messsituationen mit einer Orthese auf der Orthesenseite angepasst werden, um das Gelenkzentrum des OSGs nicht zu verfälschen. Da es sich bei der verwendeten Versorgung um eine unilaterale Orthese handelt, würde sich bei der Standardberechnung das Gelenkzentrum bei einer lateralen Anlage nach lateral und bei einer medialen Anlage nach medial verschieben. Als Referenzpunkt zur Berechnung des OSG-Zentrums im OFM-Modell wird der laterale OSG-Marker verwendet. Da sich dieser bei der Probandengruppe TD und CPFF weiter lateral als bei der Barfußmessung befindet, wird das OSG-Zentrum um diese Distanz lateralisiert. Um eine exakte Berechnung des OSG-Zentrums zu gewährleisten, wurde die zusätzliche Breite der lateralen Orthesenanlage ausgemessen und mit dem Faktor 2 auf die gemessene Knöchelbreite addiert. Alle Teilnehmer der Gruppen TD und CPFF wurden mit einem lateral angebrachten DS ausgestattet, welcher die Inversion freigeben und die Eversion sperren soll.
Während und nach der Anprobe im Rahmen der Orthesenfertigung hatten die Patienten Zeit, sich an die Orthese zu gewöhnen und über ca. 4 Stunden verteilt das Gehen auf der Ebene und auf unebenem Untergrund mit dem DS und der steifen Orthese (SO) Abb. 6 zu üben (Tab. 2).
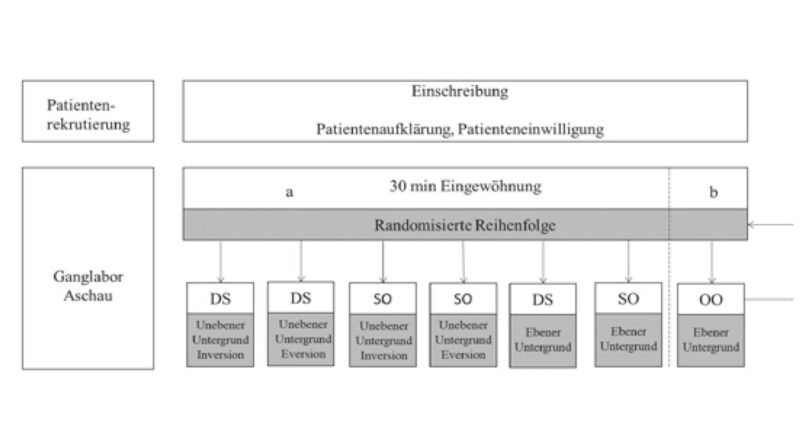
In der SO wird der DS durch einen hochfesten Aluminiumstab (EN AW 7075) ersetzt, wobei dieselbe Orthese für beide Messsituationen benutzt wird. Der eingebaute Aluminiumstab war bei einer Verwendung eines 3 mm starken DS 12 mm und bei einem 4 mm starken DS 14 mm dick. Die Adaption des Aluminiumstabes und das verwendete OSG der SO war mit der der DS-Variante identisch. Die Probanden wurden in zufälliger Reihenfolge in 2 methodischen Abschnitten im Ganglabor vermessen. Der 1. Abschnitt definiert sich durch eine Messung ohne Orthese auf ebenem Untergrund. Dabei wurden am Patienten nach dem OFM die retroflektierenden Marker direkt auf der Haut angebracht. In dieser Messsituation wurden keine Schuhe verwendet. Im 2. Abschnitt wurden die Patienten mit der zuvor angefertigten Orthese in 6 Messsituationen gemessen (Abb. 5). Dabei wurden die Marker am betroffenen Unterschenkel und Fuß entfernt. In allen Messsituationen, in denen der Proband eine Orthese trug, wurden auf beiden Seiten Orthesenschuhe verwendet. Um eine Beinlängendifferenz auszuschließen, wurde auf der kontralateralen Seite eine Ausgleichseinlage in den Schuh eingebracht. Die durch das OFM vordefinierten Markerpositionen wurden auf die Orthese und den Schuh übertragen und jeweils auf der Orthese oder dem Schuh angebracht. Vor der Messung wurde jeweils eine Eingewöhnungszeit eingeplant, in der sich der Proband frei im Ganglabor oder auf dem Unebenheitsparkour (Abb. 7) bewegen konnte. Die Messsituationen auf unebenem Untergrund fanden auf Terrasensa-Bodenplatten (Hübner Group, Kassel) statt. Auf der Gehstrecke befand sich zusätzlich eine Rampe aus festem Schaumstoff (Shore 5), die eine Neigung von (25°) nach lateral und medial aufwies. Als ein gültiger Versuch galt das Treffen der Rampe je nach Messsituation in Inversion bzw. Eversion mit dem orthetisch versorgten Bein. Beim Wechsel der Messsituation von der physiologisch abfallenden Rampe zur entgegengesetzt abfallenden Rampe wurde der Proband dahingehend instruiert, die schräge Fläche auf der anderen Seite mit der ausgewählten Steigung der jeweiligen Messsituation zu treffen. Bei der Messung auf ebenem Untergrund wurden kinetische und kinematische Messdaten aufgenommen, wohingegen auf unebenem Untergrund ausschließlich kinematische Daten aufgezeichnet wurden. Nach Abschluss einer jeden Messsituation wurde der Proband nach seinen Eindrücken zur jeweiligen Orthesenvariante befragt. Nach der Messung wurden die Gelenkbeweglichkeiten, der Grad der Spastik und der Muskelstatus nach Janda der unteren Extremität manuell und mit einem Goniometer nach Böhm et al. ermittelt5.
Ergebnisse
Unebener Untergrund
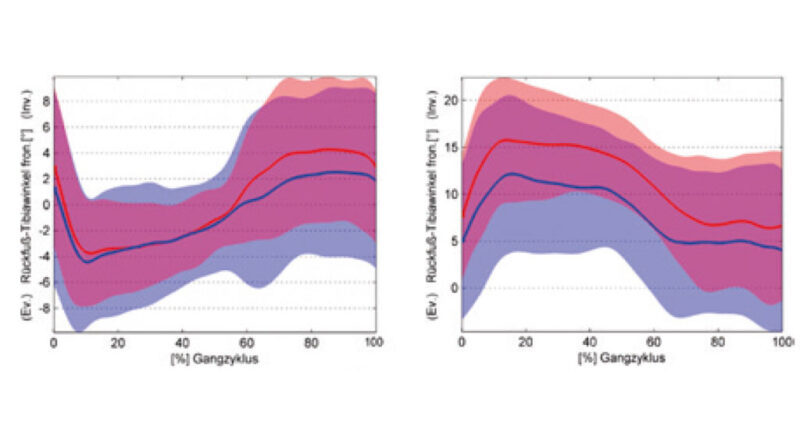
Beim Auftreten auf die in die pathologische Bewegungsrichtung abfallende Rampe der Probandengruppe CPFF erreicht der DS eine mittlere maximale Eversion von ‑4,4° ± 3,0° und die SO von ‑5,3° ± 3,8° (Abb. 8 a). In die physiologische Bewegungsrichtung zeigt der DS bei der Probandengruppe CPFF eine mittlere maximale Inversion von 17,6° ± 4,8° und die SO von 12,5° ± 6,6° (Abb. 8b).
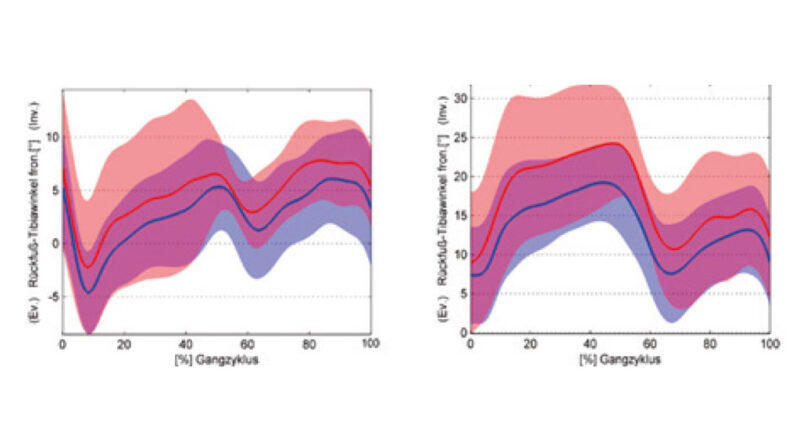
Die Ergebnisse der Probandengruppe TD sind in der Abbildung 9 dargestellt. Hierbei zeigt sich beim Auftreten aufdie in die pathologische Richtung abfallende Rampe eine mittlere maximale Eversion von 3,0° ± 5,0° beim DS und von 4,9° ± 3,5 bei der SO (Abb. 9a). In die entgegengesetzte Bewegungsrichtung erreicht der DS bei der Probandengruppe TD eine mittlere maximale Inversion von 25,4° ± 6,4° und die SO von 18,4° ± 5,9°.
Ebener Untergrund
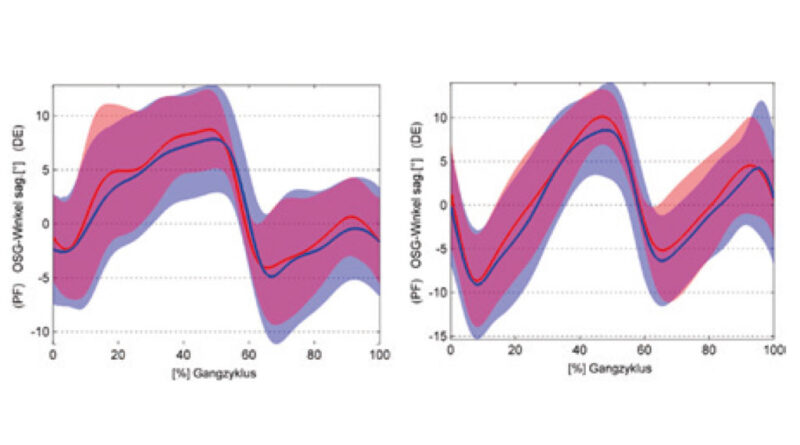
Beim Gehen auf ebenem Untergrund sind die sagittalen OSG-Winkel des DS und der SO in Abbildung 10 im Vergleich zwischen den Probandengruppen CPFF (a) und TD (b) dargestellt. Die mittlere maximale Plantarflexion (ipsilateral) der Probandengruppe CPFF beträgt mit dem DS 3,7° ± 2,2° und mit der SO 4,8° ± 2,8° (Abb. 10a). Die Probanden der TD-Gruppe erreichen mit dem DS auf ebenem Untergrund eine mittlere maximale Plantarflexion (ipsilateral) von 8,3° ± 4,7° und mit der SO von 8,9° ± 5,6°.
Diskussion
Probandenaussagen
7 von 10 Probanden verspürten nach wenigen Schritten auf einer Schräge von 25° einen Unterschied zwischen dem DS und der SO. Sie wiesen auf die erhöhte Flexibilität des DS hin. Nach den Messdurchgängen gaben 8 von 10 Probanden an, dass sie den DS bevorzugen würden. 2 Probanden hatten keine Präferenz. Die Gruppe der gesunden Teilnehmer beschrieben ein leichteres Abkippen des Fußes und konnte auf der anderen Seite teilweise eine Verbesserung des Gleichgewichts auf unebenem Untergrund feststellen, nachdem sie explizit danach befragt wurden. Beim Gehen auf der Ebene konnte keiner der Probanden Unterschiede feststellen. 4 gesunde Probanden wiesen beim Gehen mit der SO auf unebenem Untergrund und der Rampe auf unangenehme Druckreize im Fußteil hin. Diese seien hauptsächlich im medialen Bereich des Mittelfußes und der Ferse aufgetreten. Dies ist ein Indiz für eine entlastende Wirkung des DS auf das Fußteil der Orthese beim Gehen auf unebenem Untergrund.
Kinematik
Bei der Betrachtung der Inversionsfähigkeit beider Orthesensysteme erreicht der DS höhere Werte als die SO. Dabei verzeichnet der DS im Mittel bei den TD-Probanden eine maximale Inversion von 25,4° ± 6,4° und die SO von 18,4° ± 5,9°. Damit kann von einer vollständigen Anpassung des DS an die 25° schräge Rampe bei den TD-Probanden gesprochen werden. Bei den CPFF-Probanden ermöglicht der DS ebenso eine größere Inversionsbewegung, die jedoch nicht den vollen Bewegungsumfang ausnutzt. Der DS erreicht eine maximale Inversion von 17,6° ± 4,8° und die SO von 12,5° ± 6,6°. Obwohl der DS einen größeren Bewegungsumfang als die SO zulässt und die Probanden auch eine bessere Adaptionsfähigkeit berichten, adaptiert sich die Orthese in der DS-Konfiguration noch nicht vollständig an die 25°-Schräge.
Somit kann Hypothese 1, dass der DS eine größere frontale Bewegungsfreiheit in die physiologische Bewegungsrichtung ermöglicht, bestätigt werden. Durch die im Folgenden diskutierten Einflussfaktoren auf den DS und einer verwringenden Anpassung der SO ist im Mittel ein Adaptationsmehrgewinn von circa 5° zu verzeichnen. Da in der SO kein Gelenk verbaut ist, erfolgt die unkontrollierte Anpassung durch sich verwringende Gießharzanteile, Relativverschiebungen des getragenen Sportschuhs und Bewegungen zwischen der Gelenkadaption und der Orthese. Dies würde die Aussagen der Probanden bestätigen, die beim Gehen auf unebenem Untergrund mit der SO Druckspitzen im Fußteil wahrgenommen haben, da sich das Fußteil auf der Schräge in seiner Form verändert und erhöhte Drücke am Fuß erzeugen kann. Die unvollständige Adaptation des DS bei den CPFF-Probanden wird mit einem multifaktiorellen Ansatz erklärt. Da alle Probanden über einen freien Bewegungsumfang des Fußes in die physiologische Richtung verfügen, müssen interne oder externe Widerstände einer vollständigen Adaptation entgegenwirken.
Bei einer Inkongruenz zwischen einem mechanischen Orthesengelenk und dem überspannten anatomischen Gelenk kommt es zwangsläufig zu Bewegungswiderständen und Relativverschiebungseffekten6. Der Carbonstab des DS lässt einerseits mehrdimensionale Bewegungen des Fußkomplexes durch Verwringungen zu, hat andererseits aber eine Inkongruenz zur Achse des USG zur Folge. Es sind bereits Systeme bekannt, die die Orthesenachse im exakten Verlauf des USG platzieren7. Eine solche Konstruktion gibt jedoch exakt die Bewegungsachse des USG vor und würde so prinzipiell eine mehrdimensionale Anpassung des Fußes beim Gehen auf unebenem Untergrund verhindern.
Bei der in dieser Studie verwendeten Orthese, die über eine zirkuläre Ringfassung verfügt, kann davon ausgegangen werden, dass nur sehr geringe Relativverschiebungen zwischen dem Fuß und dem Fußteil auftreten. Demnach erzeugt die Gelenkinkongruenz zwischen dem DS und der USG-Achse eine Verkippung und eine distale/proximale Verschiebung der Unterhülse und somit einen im Vergleich zum physiologischen Fuß erhöhten Widerstand in die physiologische Bewegungsrichtung, der jedoch wiederum geringer ausfällt als der in der SO. Ein zusätzlicher externer Faktor, der einer vollständigen Adaptation des DS entgegenwirken kann, ist, dass bei der frontalen Adaptation die distalen Bereiche des DS mehr beansprucht werden als die proximalen Anteile. Eine Inversion bzw. Eversion des Fußes, der sich distal des DS befindet, verursacht eine Lateralisierung der distalen DS-Segmente, wohingegen die proximalen Anteile sich in ihrer Position wenig verändern. Demzufolge wird die Anpassung an den unebenen Untergrund nicht durch den gesamten DS ermöglicht, sondern durch eine verstärkte Verbiegung der distalen Segmente. Hierbei muss bei der Konstruktion des DS darauf geachtet werden, dass die distalen Segmente am meisten beansprucht werden. Demnach erhöht der DS die frontale Adaptionsfähigkeit des Fußes im Vergleich zu einer frontal steifen Orthese und reduziert so potentiell zusätzlich Druckspitzen im Orthesenfußteil. Durch die mehrdimensionale Flexibilität können zudem Anpassungen an verschiedene Schrägen erfolgen, wie es beim PSS-System8 nicht möglich ist.
Beim Auftreten auf die in die pathologische Bewegungsrichtung abfallende Rampe kann sowohl bei der Gruppe CPFF und TD eine Restbeweglichkeit bei der SO und dem DS in die Eversion beobachtet werden (Abb. 8, 9). Bei einer medizinisch geforderten Rigidität ist demnach auf eine ausreichend stabile Bauweise der Orthese zu achten. Zusätzlich trägt eine mögliche Relativverschiebung des getragenen Sportschuhs zu einer Erhöhung der gemessenen Werte bei. Demnach kann Hypothese 2 bestätigt werden, dass der DS die pathologische Bewegungsrichtung gleichermaßen effektiv sperren kann wie die getestete SO.
Bei der Betrachtung der Plantarflexion beim Gehen auf ebenem Untergrund (Abb. 10) fällt auf, dass die TD-Probanden im Mittel einen Maximalwert von 8,3° ± 4,7° mit den DS und 8,9° ± 5,6° mit der SO erreichen. Die CPFF-Probanden werden in der Plantarflexion stärker eingeschränkt, können den Fuß beim Gehen auf der Ebene jedoch noch um 3,7° ± 2,2° mit dem DS und 4,8° ± 2,8° mit der SO plantarflektieren. Diese Ergebnisse entsprechen nicht den Erwartungen, da alle verwendeten OSG-Gelenke in die Plantarflexionsrichtung gesperrt waren. Dies bestätigt einerseits Hypothese 3, wonach der DS die Plantarflexion im Gangzyklus ebenso einschränkt wie eine steif konstruierte Orthese. Andererseits unterstreichen die Ergebnisse, dass bei der Anforderung einer exakten Bewegungslimitierung in die Plantarflexion des OSG eine bilaterale oder eine stark versteifte Orthesenkonfiguration verwendet werden muss. Bei der Verwendung des DS ist nun zudem darauf zu achten, dass die verwendete Orthese eine erhöhte Verwindungssteifigkeit zur ausreichenden Limitierung der Plantarflexion aufweist. Die Plantarflexionsmesswerte beim Gehen auf ebenem Untergrund sind jedoch Maximalwerte, die für einen kurzen Zeitraum erreicht werden. Demnach kann eine Anwendung des DS unter Berücksichtigung der geforderten Orthesenbauweise für Patienten empfohlen werden, die eine vermehrt frontale Flexibilität beim Gehen auf unebenem Untergrund ausnützen können, und wenn eine Spitzfußkorrektur durch eine versteifte/unilaterale Orthese durchgeführt werden kann.
Fazit
Die Adaptation des Fußes an unebenen Untergrund unterstützt den Geh-apparat in seiner Stabilität und stellt eine grundlegende Funktion des Fußkomplexes dar. Bei einer orthetischen Versorgung von spastischen Fußfehlstellungen wird diese Adaptationsfähigkeit des Fußes limitiert. In der Literatur finden sich keine Orthesenkonzepte, die eine frontale Bewegung des Fußes unter Berücksichtigung der Erhaltung einer vollständigen Korrektur erlauben.
Demzufolge wurde im Rahmen dieser Studie ein Orthesenkonzept biomechanisch überprüft, das unter Erhaltung der vollständigen Fußkorrektur bei spastischen Spitzfüßen eine frontale Bewegung des Fußes und somit eine Adaptation an unebenen Untergrund ermöglichen soll. Dabei wurden 5 CP-Betroffene und 5 gesunde Probanden mit individuell angefertigten Orthesen ausgestattet und ganganalytisch auf ebenem und unebenem Untergrund in einem mit Vicon-Kamerasystem ausgestatteten Ganglabor untersucht.
Es zeigte sich, dass der neu entwickelte dynamische Stabilitätsträger (DS) im Vergleich zu einer frontal versteiften, jedoch andernfalls identischen Orthesenkonfiguration (SO) einen signifikant erhöhten Bewegungsumfang in die freigegebene physiologische Bewegungsrichtung ermöglicht, die pathologische Bewegungsrichtung im gleichen Maße wie eine SO sperrt und die mögliche Plantarflexion im Vergleich zur SO nicht erhöht. Demnach kann der DS für GMFCS-I-II-Patienten eine zusätzliche Lösung dafür darstellen, die frontale Fußbeweglichkeit trotz einer mehrdimensionalen Spitzfußkorrektur in Teilen zu erhalten.
Für die Autoren
Thomas Wetzelsperger
M.Sc. / OTM Orthopädietechnik
Leiter Clinical Evidence & Publications
Pohlig GmbH
Grabenstätter Straße 1
83278 Traunstein
Thomas.Wetzelsperger@pohlig.net
Begutachteter Beitrag/reviewed paper
Wetzelsperger T, Kapeller B, Michalke L, Mader K, Kienzle C. Neues Orthesenkonzept zur Verbesserung der Fußbeweglichkeit in der Frontalebene bei Unterschenkelorthesen mit Ringfassung. Orthopädie Technik, 2024; 75 (1): 36–43


Tab. 1 Anpropometrische und pathologische Daten der Probanden.
| Proband TD | Geschlecht | Alter [Jahre] | Größe [cm] | Gewicht [kg] | Versorgte Seite | GMFCS | Fehlstellung |
|---|---|---|---|---|---|---|---|
| 1 | w | 7 | 126,5 | 26,5 | re | / | / |
| 2 | m | 9 | 137,5 | 28 | re | / | / |
| 3 | m | 12 | 146 | 31,7 | re | / | / |
| 4 | m | 7 | 127,5 | 22,8 | re | / | / |
| 5 | w | 8 | 128 | 23,9 | re | / | / |
| M/SD | 8,6 ± 1,9 | 133,1 ± 7,5 | 26,6 ± 3,1 | ||||
| Unilateral/spast. ZP | |||||||
| 6 | m | 11 | 145 | 29,9 | li | 2 | Spitzknick |
| 7 | m | 13 | 145 | 43 | re | 1 | Spitzknick |
| 8 | w | 12 | 163,5 | 54,3 | li | 1 | Spitzknick |
| 9 | m | 6 | 121 | 21,3 | re | 2 | Spitzknick |
| 10 | m | 6 | 115 | 17,9 | re | 1 | Spitzklump |
| M/SD | 9,6 ± 3,0 | 137,9 ± 17,7 | 33,3 ± 13,6 |
Tab. 2 Durchgeführte Messsituationen.
| Tabelle 2 | |
|---|---|
| bf/oo | Barfuß ohne Orthese |
| gf | Gehen auf der Ebene mit DS |
| gs | Gehen auf der Ebene mit SO |
| gfu | Gehen auf unebenem Untergrund (Rampe abfallend in freigegebene/physiologische Bewegungsrichtung) mit DS |
| gsu | Gehen auf unebenem Untergrund (Rampe abfallend in freigegebene/physiologische Bewegungsrichtung) mit SO |
| gfue | Gehen auf unebenem Untergrund (Rampe abfallend in gesperrte/pathologische Bewegungsrichtung) mit DS |
| gsue | Gehen auf unebenem Untergrund (Rampe abfallend in gesperrte/pathologische Bewegungsrichtung) mit SO |
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Konservative Versorgung einer adulten Skoliose mit einem modularen Bausatz – ein Versorgungsbeispiel — 6. März 2026
- Schanz A. Handbuch der orthopädischen Technik, Verlag von Gustav Fischer, Jena, 1908
- Wingstrand M, Hägglund G, Rodby-Bousquet E. Ankle-foot orthoses in children with cerebral palsy: a cross sectional population based study of 2200 children. BMC Musculoskeletal Disorders, 2014; 15 (1): 327
- McCahill J et al. Repeatability of the Oxford Foot Model in children with foot deformity. Gait & Posture, 2018; 61: 86–89
- Curtis DJ et al. Intra-rater repeatability of the Oxford foot model in healthy children in different stages of the foot roll over process during gait. Gait & Posture, 2009; 30 (1): 118–121
- Böhm H, Stief F, Dussa CU, Döderlein L. Predictors of pelvic retraction in children with cerebral palsy derived from gait parameters and clinical testing. Gait & Posture, 2012; 35 (2): 250–254
- Bottlang M, Marsh JL. Articulated external fixation of the ankle: minimizing motion resistance by accurate axis alignment, Journal of biomechanics, 1999; 32 (1): 63–70
- Baise M, Pohlig K. Die funktionelle Spitzfußbehandlung bei Spastikern mit dem physiologischen Sprunggelenksystem (PSS). Orthopädie Technik, 2003; 54 (3) 170–177
- Baise M, Pohlig K. Die funktionelle Spitzfußbehandlung bei Spastikern mit dem physiologischen Sprunggelenksystem (PSS). Orthopädie Technik, 2003; 54 (3) 170–177
