1. Einführung
Die Versorgungssituation nach einer partiellen Handamputation kann sehr stark variieren und fordert von der prothetischen Versorgung sehr individuelle und variable Lösungsansätze. Die Bandbreite erstreckt sich vom Fehlen einzelner Fingerglieder bis zu ganzen Teilen der Mittelhand und des Daumens. Erschwerend können Versteifungen der Gelenke, Narben und Hautlappen mit den damit verbundenen Funktionseinschränkungen sowie Überempfindlichkeiten an den verbliebenen Teilen der Hand auftreten. Neben einem anspruchsvollen Schaftdesign müssen auch die prothetischen Passteile diesem Anforderungsprofil gerecht werden.

1.1 Versorgungspraktiken
Für die prothetische Versorgung nach einer partiellen Amputation kommen oft Silikonprothesen zum Einsatz, die in Form, Farbgebung und Haptik der menschlichen Hand nachempfunden sind. Dabei kann das äußere Erscheinungsbild der geschädigten Hand weitgehend wieder hergestellt werden, was für viele Betroffene einer der wichtigsten Versorgungsaspekte ist. Durch gezielte Versteifungen im Silikon oder manuell fixierbare Fingergelenke wie dem Rastergelenk „Pohliflex“ 1 der Pohlig GmbH 2 können diese Prothesen auch funktionelle Aufgaben übernehmen.
Eine leider viel zu selten zum Einsatz kommende Prothesenvariante sind die eigenkraftbetriebenen Partialhandprothesen. Dabei werden körpereigene Funktionen, in der Regel das Handgelenk oder die verbliebenen Fingerstümpfe, als Antrieb eingesetzt. Bei der Nutzung der Handgelenkbewegung wird entweder die direkte Bewegung zum Greifen genutzt oder ein indirekter Antrieb durch Seilzüge vom Unterarm bis zum Handrücken und weiter bis in die mechanischen Fingergelenke der Prothese. Eine Beugung des Handgelenks beansprucht in diesem Bereich Seillänge und bewirkt eine Zugkraft in den Fingergelenken, die diese zum Abwinkeln veranlassen. Ein Beispiel sind die seit 2009 verfügbaren „M‑Fingers“ des amerikanischen Anbieters LTI 3.
Bei Systemen wie den „X‑Fingers“ des amerikanischen Anbieters Didrick Medical 4 wird die Restbeweglichkeit der Fingerstümpfe über ein Hebel- und Schubstangensystem für einen Antrieb distaler Teilfingerprothesen benutzt. Die Prothesenarten ermöglichen gleichermaßen sehr schnelle und direkt ansprechende Bewegungen. Sie sind in der Regel sehr leicht, wartungsarm und der anatomischen Größe der verloren gegangen Handteile angepasst.
Ein Nachteil, den beide Systeme jedoch mit sich bringen, ist die für viele Anwendungen zu geringe Kraftwirkung. Bei den Seilzügen des M‑Finger Systems sind es die hohen Reibungsverluste, wie bei allen Bowdenzug-Systemen. Bei den Mechaniken des X‑Finger Systems sind es die ungünstigen Kraftverhältnisse am Fingerstumpf und die geringe Traglast der Bewegungsmechanik. Lediglich bei den direkten Bewegungsumsetzungen können entsprechende Kraftressourcen zum Halten von schweren Gegenständen erzeugt werden 5.
1.2 Historie elektrisch betriebener Partialhände
Bereits 1989 wurde unter dem Namen „Externally powered fingers“ in den USA ein unter der Leitung des „VA Lakeside Medical Center, Chicago“ und vom „Department of Veterans Affairs Rehabilitation R&D“ und dem „National Institute on Disability and Rehabilitation Research (NIDRR)“ gefördertes Projekt abgeschlossen. Dieses Forschungsprojekt hatte das Ziel, eine motorgetriebene Partialhand zu entwickeln 6. Im Rahmen dieses Projekts konstruierte R. Weir an der „Northwestern University of Chicago, Department of Biomedical Engineering“, eine Prothese, bei der die Motoren und Getriebe erstmals vollständig innerhalb einzelner Finger und in einem Daumen integriert werden konnten 7 8. Diese Arbeiten können als Vorläufer aller heute eingesetzten motorisierten Partialhandsysteme angesehen werden.
1.3 Aktuelle Systeme
In der Versorgungspraxis wurde das 1989 an der „Northwestern University of Chicago“ entwickelte Funktionsprinzip, bei dem die Motoren direkt in den Prothesenfingern integriert werden, erstmals 2007 durch das schottische Unternehmen Touch Bionics in ein Produkt umgesetzt. Die motorisierten Finger einer zunächst als Hand konzipierten Prothese „iLimb“ können dabei auch separat als Einzelfinger eingesetzt werden. Diese „ProDigits“ genannten Prothesenfinger bieten neue Versorgungsmöglichkeiten, insbesondere bei Patienten, bei denen große Teile der Hand zu ersetzen sind. Zahlreiche Versorgungen wurden mit diesem System bereits durchgeführt 9. Die Grenzen dieser Systeme liegen in ihrer Baugröße. Selbst bei neueren, kürzeren Varianten gestaltet sich die Bauhöhe v. a. bei Handamputationen, bei denen die Mittelhand erhalten werden konnte, schwierig.
2. Das Vincent-Partialhand-System
Das im Artikel vorgestellte Partialhandsystem wurde von der Vincent Systems GmbH 10 in Weingarten entwickelt und wird vollständig in der Region Baden Württemberg produziert. Das Konzept für das neue Prothesensystem ist aus der Versorgungspraxis heraus entstanden. Erfahrene Orthopädie-Techniker waren an der Planung und allen Entwicklungsstufen beteiligt.
Zahlreiche Patientenversorgungen wurden entwicklungsbegleitend durchgeführt und haben den Optimierungsprozess entscheidend beeinflusst 11 12 13. Im Vordergrund stand dabei, ein einfach zu handhabendes System zu entwickeln, das eine annähernd anatomisch korrekte Wiederherstellung der aktiven Greif- und Haltefunktion gestattet. Kosmetik, Gewicht, Haltekraft, Greifgeschwindigkeit und Geräuschentwicklung waren weitere entscheidende Aspekte bei der Neuentwicklung (Abb. 1). Kernstück des vorgestellten Systems ist eine elektrisch angetriebene Einzelfingerprothese. Ein in den Finger integrierter Getriebemotor treibt das Grundgelenk und das Mittelgelenk an (Abb. 2). Der Antrieb bewegt das Grundglied gegenüber der Mittelhand direkt und das Mittelfingerglied gegenüber dem Grundglied elastisch gekoppelt über eine Feder. Das starre Fingerendglied verfügt über eine elastische Fingerspitze 14.
2.1 Einzelfingerprothese
Die Einzelfingerprothesen werden in drei unterschiedlichen Längen, mit der Größenbezeichnung VS‑L, VS‑M und VS‑S, hergestellt (Abb. 3). Das Grundglied ist weitgehend gleich. Der Abstand zwischen der Montagefläche und der ersten beweglichen Achse beträgt hier 8 mm. Die im Mittelfingerbereich 66 mm langen VS-L-Finger werden bei gleicher Motorisierung durch die mit 60 mm wesentlich kürzeren VS‑M Finger abgelöst. Der mit 53 mm kürzeste Finger VS‑S hat eine etwas schwächere Motorisierung, ist jedoch für besonders kurze Versorgungen geeignet. Das 12 mm lange distale Fingerglied kann über auswechselbare Fingerspitzen zwischen 10 mm bis 25 mm in 5 mm Abstufungen verlängert werden. Ein VS-L-Finger mit einer 20 mm langen Fingerspitze hat damit eine Gesamtlänge von ca. 94 mm. Der kleinste VS-S-Finger hat mit einer 10 mm Fingerspitze eine Gesamtlänge von ca. 70 mm.
Die vollständige Partialhandprothese wird in der Regel mit einem kosmetischen Silikonhandschuh ummantelt. Dieser schützt die Prothese, unterstützt das adaptive Greifen durch die vergrößerte Oberfläche der Hand und verbessert in erheblichem Maße die Kosmetik der Versorgung. In Ausnahmefällen, bei denen keine Handschuhkosmetik zur Anwendung kommt, werden die Finger auch unverkleidet eingesetzt. In diesem Fall werden partielle elastische Schutzelemente über die Fingersegmente gezogen (Abb. 4).
Adaption zum Prothesenschaft
Die exakte Positionierung, Ausrichtung und Anbindung der motorisierten Finger an den Prothesenschaft stellt ohne weitere Hilfsmittel eine zeitintensive und anspruchsvolle Arbeit dar. Bei sehr begrenztem Bauraum wird eine Bohrmusterschablone bereitgestellt, die ein direktes Verschrauben der Einzelfinger am Verbundmaterial des Schafts erleichtert. Die Finger werden dann mit jeweils zwei Kabeln zur elektrischen Kontaktierung bereitgestellt. Stehen ca. 4 mm mehr Baulänge zur Verfügung, kann ein modulares Rahmensystem eingesetzt werden. Der stabile Aluminiumrahmen übernimmt die Positionierung und Stabilisierung der Einzelfinger in einer Reihe oder entlang eines Bogens, unter Berücksichtigung einer leichten Abduktion der Finger in einem fest eingestellten Winkel (Abb. 5).
Der Rahmen kann bereits Teile der Steuerungselektronik und Sensorik enthalten. Winkelbleche mit unterschiedlichen Stufenlängen gestatten, zwischen geraden Rahmen und solchen mit Stufen, z. B. im Bereich des kleinen Fingers, zu unterscheiden. Jeder Finger wird Platz sparend von deren Rückseite her mit je 4 Schrauben an fest definierten Rahmenpositionen befestigt. Die elektrische Kontaktierung erfolgt über Federkontakte, die auf der Elektronikplatine im Rahmen eingelassen sind und bei der Montage auf die vergoldeten Kontaktflächen der Fingerprothese treffen.
Der Rahmen selbst wird mit individuell platzierbaren und in eine gewünschte Form biegsamen Halteblechen an die Prothesen-Schaftstruktur angepasst und verschraubt. An dieser Verschraubung kann der gesamte Rahmen zum Wechsel einzelner Finger leicht demontiert werden. Ein Durchtrennen und neues Verbinden von elektrischen Leitungen ist dabei nicht erforderlich. Je nach Versorgungslage können Rahmen für 1 bis 4 Finger eingesetzt werden (Abb. 6). Auch kommen verschiedene Übergangsbleche zwischen Fingerrahmen und Daumen zur Anwendung.
2.2 Daumenprothese
Der Daumen hat eine herausragende Bedeutung beim Greifen und Halten im Zylinder- und Lateralgriff sowie mit der Opponierbarkeit zu den Fingern in besonderem Maße für die Präzisionsgriffe: Pinzetten- und Dreipunktgriff. Im Gegensatz zu den Fingern ist der Verlust des Daumens nicht durch die verbliebenen Finger zu kompensieren, eine wesentliche Funktionseinschränkung ist die Folge.
Passiver Daumen
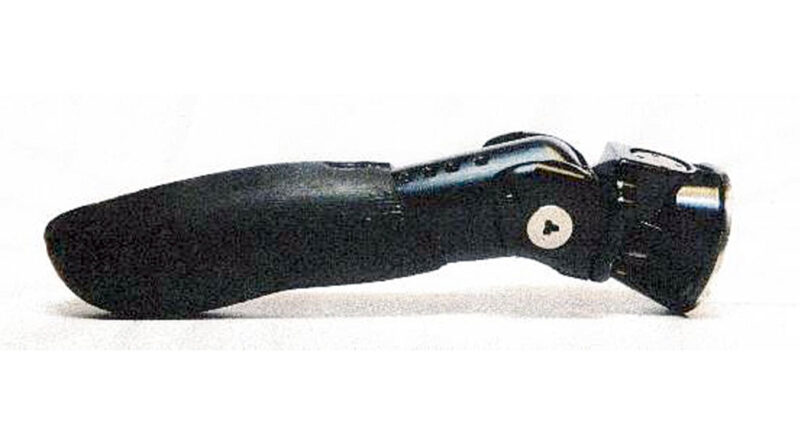
In Versorgungssituationen, bei denen ein Daumstumpf über nicht genügend Stumpflänge, Beweglichkeit oder andere Adaptionsmöglichkeiten für eine funktionelle Daumen-Kosmetik verfügt, kann mit einem mechanisch betätigten Daumen gearbeitet werden (Abb. 7).
Dieser Daumen, mit der Bezeichnung „VS-thumb‑p“ (p=passive), ist mit zwei Bewegungsachsen ausgestattet. Die proximale Achse gestattet das Ein- und Ausschwenken des Daumens, wobei der Bewegungswiderstand stufenlos über eine Spannschraube direkt an der Achse eingestellt werden kann. Die zweite, zur proximalen Achse um 90 Grad verdrehte distale Achse, ist mit einem Rastermechanismus ausgestattet. Dieser erlaubt eine stufenweise Adduktion und ein Blockieren der entgegengesetzten Richtung durch die Verzahnung (Abb. 8). Das Öffnen des Daumens erfolgt durch eine Zugkraft am distalen Daumenende und einer gleichzeitigen Rückschwenkbewegung.
Aktiver Daumen
Bei Versorgungssituationen, bei denen motorisierte Finger eingesetzt werden und die nötige Peripherie wie Steuerung, Sensorik und Akkusystem zum Einsatz kommen, kann es vorteilhaft sein, auch den Daumen aktiv zu steuern, sofern für den Patienten dadurch ein Mehrwert an Funktionalität erreicht werden kann. Mit dem VS-thumb‑a steht ein motorisierter Daumen zur Verfügung (Abb. 9). Seitens Steuerung werden spezielle Daumen-Modi angeboten, bei denen insbesondere die Adduktion beim Präzisionsgriff kontrolliert wird. Das proximale passive Gelenk des Daumens ist nahezu baugleich mit dem des manuellen Daumens. Das distale motorisierte Daumengelenk ist ähnlich einem Einzelfinger aufgebaut, jedoch ohne eine bewegliche Fingerspitze. Stattdessen ist der Daumen mit einem elastischen PU ummantelt.
2.3 Prothesensteuerung
Zum Betrieb der Prothesenfinger müssen verschiedene Komponenten in den Prothesenschaft integriert werden. Die Einzelfinger sind kabellos über Federkontakte mit dem Rahmen verbunden, dieser wiederum über Einzellitzen mit der Motorsteuerung. Die Steuerung besitzt je nach Ausführung zwischen 4 und 6 Steckplätze für aktive Fingerprothesen und einen Daumen mit bis zu 2 aktiven Bewegungsachsen. Über 2 Ports können unterschiedliche Sensoren angeschlossen werden und über einen weiteren Steckplatz die Spannungsversorgung. Hier kommen in der Regel prismatische LiPo-Zellen zum Einsatz mit einer Gesamtspannung von 8,4 V und Kapazitäten von 750 mAh bis 2000 mAh. Die Akku-Zellen werden über einen Magnetstecker geladen, an dem sich auch der Ein/Aus-Schalter des Systems befindet. Die Steuerungselektronik der Prothese kann je nach Controllertyp über eine Kabelverbindung oder eine Bluetooth-Verbindung mit einem PC verbunden werden, um patientenspezifische Einstellungen vorzunehmen. Ein 2‑Finger-System ist in Abbildung 10 dargestellt.
Sensoren
Die Prothesensteuerung kann wahlweise mit einem oder 2 Sensoren bedient werden. Der Anwender hat die Möglichkeit, zwischen EMG-Sensor, Touchpads und Biegesensoren zu wählen, wobei die Sensoren auch gemischt eingesetzt werden können. Reichen die Eingabemöglichkeiten nicht aus, kann das System über das in der 6‑Kanal-Steuerung integrierte Bluetooth-Modul mit weiteren Eingabegeräten kabellos erweitert werden. Auf diese Weise können die Sensoren wie z. B. EMG an beliebiger Stelle des Patienten platziert werden oder alternative Sensoren zum Einsatz kommen.
Aufgrund ihrer flachen Bauform und kleinen Abmessungen werden in der Partialhandversorgung häufig sogenannte Touchpads oder FSR-Sensoren verwendet. Diese Sensoren ändern in Abhängigkeit von der Druckkraft ihren ohmschen Widerstand. Steigt die Kraft, sinkt der Widerstand. In der Regel werden diese Sensoren über einen Spannungsteiler mit der Batteriespannung direkt an den Analogeingängen der Prothesensteuerungen betrieben.
Bei diesem Aufbau wird das Sensorsignal in Abhängigkeit von der Betriebsspannung erzeugt. Sinkt die Akku-Spannung, nimmt im gleichen Verhältnis auch der Signalpegel des Sensors ab. Die Steuerungselektronik im Vincent-System kompensiert dieses Verhalten über seine Betriebssoftware, indem stets auch die Betriebsspannung mit jedem Sensorwert gemessen und beide Werte miteinander verrechnet werden. Der für Partialhandanwendungen modifizierte FSR-Sensor VS-touch liefert dagegen ein vom Ladezustand der Batterie unabhängiges Signal. Er besitzt eine eigene Spannungsstabilisierung und ein Potentiometer, um das Sensorsignal zu verstärken oder abzusenken, ähnlich der Einstellmöglichkeit an einer EMG-Elektrode (Abb. 11). Mit einem zusätzlichen internen Trimm-Potentiometer wird jeder FSR-Sensor vor der Auslieferung kalibriert, da die eigentlichen Sensorzellen stark untereinander variieren 15.
Prothesensteuerung, basierend auf Morse-Codierung
Zur Steuerung der Handfunktion werden in der Regel ein bis zwei Sensorsignale ausgewertet. Diese Signale werden dem proportionalen Öffnen und Schließen der Hand zugeordnet. Die motorisch individuell ansteuerbare Einzelbeweglichkeit jedes Fingers und des Daumens gestatten dem VINCENT-Partialhandsystem darüber hinaus einen sehr hohen Bewegungsumfang. Derzeit kommen 1 bis 6 Motoren an einer Handversorgung zum Einsatz. Zur Vereinfachung der Bedienung werden dem Nutzer Griffarten vorgegeben, zwischen denen er mit einfachen Steuerbefehlen wählen und umschalten kann. Für einfache Umschalt- und Steuerungsfunktionen reichen wenige Schaltsignale wie ein bis drei kurze Muskelkontraktionen, Co-Kontraktionen oder das Unterscheiden von steilen oder flachen Anstiegsflanken eines Signals. Hier sind seitens Kognition des Patienten und Einhaltung akzeptabler Verzögerungszeiten schnell die Grenzen bezüglich des Befehlsumfangs erreicht. Eine dynamische Griffauswahl darüber hinaus wäre wenig sinnvoll.
Für die Bedienung des VINCENT-Systems wurde daher ein neues Steuerungskonzept entwickelt, mit dem insbesondere ein umfangreicher Befehlssatz zwischen Mensch und Prothese effizient kommuniziert werden kann.
Kern dieser Entwicklung ist die Adaption des in der Informationsübertragung für Buchstaben, Zahlen und Symbole eingesetzten Morsealphabets, dessen Codierungsform insbesondere auf eine robuste und effiziente Übertragung von Informationen beruht.
Die Steuerbefehle der Prothesensteuerung werden aus zwei Steuerzeichen gebildet. Diese unterscheiden sich entweder in der Zuordnung der Signalquelle, durch eine unterschiedliche Signallänge oder durch eine unterschiedliche Signalamplitude. Je nach Motorik und Kognition des Prothesenträgers kann eine Signalvariante oder die Kombination aus unterschiedlichen Varianten gewählt werden. Ein Steuerbefehl besteht dabei aus mehreren Steuerzeichen. Im Morsecode stehen zwei Steuerbefehle mit einem Steuerzeichen, 4 Steuerbefehle mit 2 Steuerzeichen, 8 Steuerbefehle mit 3 Steuerzeichen usw. zur Verfügung.
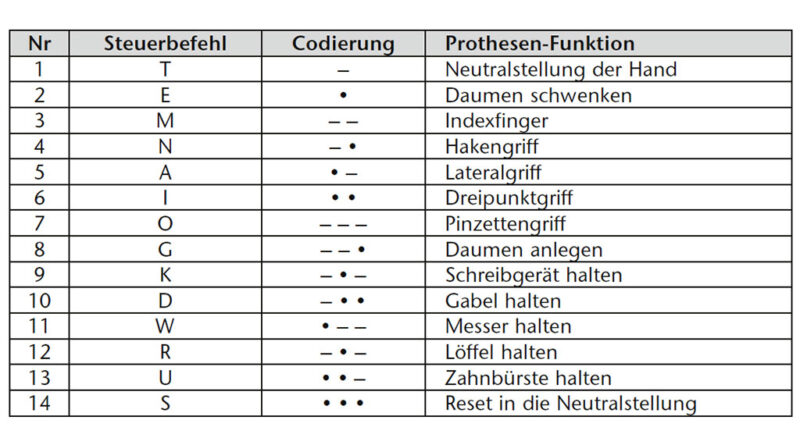
Bei der Prothesensteuerung werden häufig verwendete Griffmuster wie Zylindergriff, Pinzettengriff oder die Daumenbewegung mit einem kurzen Steuerbefehl, bestehend aus zwei Steuerzeichen, ausgewählt. Andere weniger oft verwendete Griffmuster, wie die Indexstellung des Zeigefingers mit einem etwas längeren Steuerbefehl, bestehen aus 3 Steuerzeichen. Selten eingesetzte aber dennoch funktionelle Griffmuster, die zum Beispiel das individuelle sichere Halten oder Klemmen von Essbesteck, Schreibgeräten oder Werkzeugen ermöglichen, können mit Steuerbefehlen aus 4 oder mehr Zeichen belegt werden, sofern die kürzeren Steuerbefehle bereits mit Funktionen belegt wurden. Eine exemplarische Zuordnung wird in der Tabelle 1 dargestellt. Diese prioritätsabhängige Komplexitätsabstufung im Aufbau der Steuerbefehle gestattet dem Prothesenträger eine sehr effiziente Steuerung der Vincent-Prothese und bietet dem Anwender mit zunehmenden Trainingsgrad gleichermaßen einen stets erweiterbaren Funktionsumfang.
2.4 Klinische Evaluierung
Das vorgestellte Partialhandsystem befindet sich in der klinischen Evaluierungsphase. Qualifizierte Fachwerkstätten in Deutschland und den USA unterstützen die praktische Erprobungsphase, gemeinsam mit zahlreichen Patienten. Die Rückmeldungen der Patienten und der Versorgungsspezialisten geben wichtige Impulse für ein stetiges Re-Design des Prothesensystems. Die Optimierung der Prothesensteuerung, die mechanischen Details sowie die Servicefähigkeit des Gesamtsystems stehen dabei im Mittelpunkt.
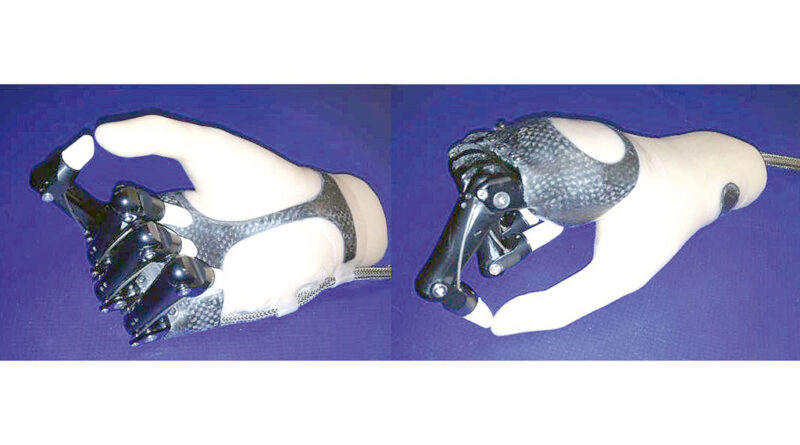
Die Abbildung 12 zeigt ein Versorgungsbeispiel für einen Patienten mit partieller Amputation aller Finger. Die Systemkomponente Batterie, Magnet-Ladebuchse und Steuerungselektronik wurden in einen Unterarm-Schaft integriert, die Sensoren, der Fingerrahmen und die vier Einzelfinger der Größe VS‑L wurden in den mehrschaligen Hand-Schaft eingelassen. Das Prothesendesign entstand in Zusammenarbeit zwischen Biodesigns 16 und Lake Prosthetics 17, jeweils auf Partialhandversorgung spezialisierte Fachwerkstätten in den USA. In der Abbildung 13 ist ein Versorgungsbeispiel dargestellt, bei dem ausschließlich die kleinste Bauform der aktiven Finger, die VS‑S, eingesetzt wurde. Die Kombination zwischen Prepreg-Rahmen und Silikon-Innenschaft verfolgt das Ziel der maximalen Weichgestaltung des Prothesenschafts. Lediglich im Bereich der wichtigen Führungszonen kommt der minimale Carbon-Prebreg-Rahmen zur Wirkung. Großflächige Areale können je nach Hautsituation mit Silikon weich gebettet und adaptiv oder sogar frei gebetet werden. Dadurch erhält der Prothesenträger ein bestmögliches Feedback zu den gegriffenen Gegenständen und v. a. ein adaptives Verhalten des Handstumpfes 18.
Danksagung
Unser besonderer Dank gilt unseren klinischen Partnern in Deutschland, Österreich und den USA, insbesondere den an der Entwicklung beteiligten Orthopädie-Technikern. Hervorheben möchten wir M. Schäfer (Pohlig GmbH), J. Uellendahl (Hanger Clinic), C. Lake (Lake Prosthetics and Research) sowie R. Alley (Biodesigns).
Der Autor:
Dr. Dipl. Ing. Stefan Schulz
Vincent Systems GmbH
Königsberger Straße 2
76356 Weingarten
stefan.schulz@vincentsystems.de
Begutachteter Beitrag/Reviewed paper
Schulz S. Neue Perspektiven in der prothetischen Partialhandversorgung. Orthopädie Technik, 2013; 64 (2): 32–37











- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Schäfer M. Prothetische Versorgungskonzepte nach partiellen Amputationen im Handbereich“. Orthopädie Technik 2009; 60 (09): 584–595
- Pohlig GmbH. www.pohlig.com, Traunstein, Germany, 2012
- M‑Finger. LTI, Liberating Technologies Inc., www.liberatingtech.com, Holliston, US, 2012
- X‑Fingers®. Didrick Medical, www.didrickmedical.com, Naples, US, 2012
- Schäfer M. Prothetische Versorgungskonzepte nach partiellen Amputationen im Handbereich“. Orthopädie Technik 2009; 60 (09): 584–595
- Childress D, Grahn E, Wier R, Heckathorne C, Strysik J. Powered Prosthetic Fingers in: Rehabilitation R & D Progress Reports 1990, Washington DC, Journal of Rehabilitation Research & Development 1990; 25: 20–21
- Weir R. An externally-powered myo-electrically controlled synergetic prosthetic hand for the partial hand amputee, Thesis, Chicago, Northwestern University, Department of biomedical engineering, 1989
- Weir R. The design and development of a synergetic partial hand prosthesis with powered fingers, New Orleans, LA. In Proceedings of RESNA 12th Annual Conference 1989: 473–474
- Uellendahl J. Experience Fitting Partial Hand Prostheses Using ProDigits, Leipzig, 13th World Congress of the International Society for Prosthetics and Orthotics, 2010; (5)
- Vincent Systems GmbH — Medical Technics. www.vincentsystems.de, www.handprothese.de, Weingarten, Germany, 2012
- Fairley M. State-of-the-Art: Upper-Limb Prosthetics Technology (C. Lake: New Territory in Partial-Hand Technology), www.oandp.com/articles/2009–10_01.asp, Florida, US, The O&P EDGE Resource for Orthotics & Prosthetics Information 2009; (10)
- Schäfer M. Prothetische Versorgungskonzepte nach partiellen Amputationen im Handbereich“. Orthopädie Technik 2009; 60 (09): 584–595
- Schulz S. First experiences with the Vincent hand, MEC 11, Proceedings of the 2011 MyoElectric Controls/Powered Prosthetics Symposium Fredericton, Canada, University of New Brunswick, 2011
- Schulz S. VINCENT – Ein innovatives mehrgliedriges Finger- und Handsystem. Orthopädie Technik 2011; 62: 249–255
- Schulz S. Sensor options for multi-articulating partial hand prostheses“. MEC 11, Proceedings of the 2011 MyoElectric Controls/Powered Prosthetics Symposium Fredericton, Canada, University of New Brunswick, 2011
- Biodesigns inc. www.biodesigns.com, Thousand Oaks, US, 2012
- Lake Prosthetics and Research. www.lakeprosthetics.com, Euless, US, 2012
- Schäfer M. Prothetische Versorgungskonzepte nach partiellen Amputationen im Handbereich“. Orthopädie Technik 2009; 60 (09): 584–595
