Einleitung
Auf dem Feld der Orthopädietechnik existiert im Kontext der Bewegungsanalyse eine große Zahl von Messsystemen, die auf unterschiedlichen Technologien beruhen. Diese Systeme unterscheiden sich vor allem in Bezug auf Messgenauigkeit, Ortsgebundenheit, Messaufwand, Aufwand für die Datenverarbeitung und Anschaffungspreis. Zur Beurteilung von deren Anwendbarkeit im orthopädietechnischen Alltag werden im Folgenden verschiedene gängige Technologien betrachtet. Dazu zählen:
- Videoanalyse
- 3D-Kamerasysteme
- Kraft- und Druckmessplatten
- Inertiale Messeinheiten (IMUs)
Videoanalyse
Eine klassische Videoanalyse wird mittels einer oder mehrerer Videokameras durchgeführt. Die Kameras sind in diesem Fall nicht zueinander kalibriert, sodass ihre unterschiedlichen Blickwinkel einzeln bewertet werden müssen. Herkömmliche Videokameras zeichnen mit einer Messfrequenz von etwa 30 Bildern pro Sekunde auf; in der Videoanalyse werden häufig auch High-Speed-Kameras mit Messfrequenzen von etwa 100 Bildern pro Sekunde eingesetzt 1. Je nach Objektiv entstehen bestimmte räumliche Anforderungen an die Messumgebung. So sollte eine orthogonal zur Bewegungsrichtung des Patienten ausgerichtete Kamera meist einige Meter entfernt stehen, um mehrere Schritte erfassen zu können. Nach der Aufnahme der Videos werden diese in der Regel von geschultem Fachpersonal ausgewertet. Auf diese Weise werden Parameter wie Gangphasen, Bewegungen der Segmente oder Gelenkwinkel qualitativ bewertet 2.
Eine Annäherung der Quantifizierung von Gangphasen kann zudem durch unterstützende Software vorgenommen werden, mit der das Video zu bestimmten Zeitpunkten pausiert werden kann, um Gang-Events zu markieren. Ebenfalls ist es möglich – je nach Software manuell oder automatisiert –, Gelenkzentren zu detektieren 3. Dies ermöglicht eine Abschätzung von Gelenkwinkeln. Klassische Videoanalyse-Systeme bieten bereits große Vorteile gegenüber einer einfachen visuellen Bewertung von Patientinnen und Patienten, jedoch sollten gewisse Limitationen dabei nicht außer Acht gelassen werden. Eine solche ist etwa die subjektive Natur und die Abhängigkeit von der untersuchenden Person 4. Dieser Aspekt ist immer dann relevant, wenn keine automatisierte Detektion (wie oben genannt) genutzt wird und somit nicht gesichert ist, dass unabhängig von der untersuchenden Person das gleiche Ergebnis erzielt werden würde. Bei einem automatisierten Tracking der Gelenkzentren ist ein solcher Einfluss irrelevant.
Eine weitere Limitation der klassischen Videoanalyse ist der Mangel an Tiefeninformation der Videos: In vielen Aufbauten wird eine Kamera in Bewegungsrichtung der Probanden und eine weitere Kamera orthogonal zur Bewegungsrichtung aufgebaut 5. Für die Analyse wird dann angenommen, dass die Ebenen der Kameras mit der Frontalebene und der Sagittalebene der Testpersonen übereinstimmen, was in der Praxis jedoch selten der Fall ist. Dies betrifft beispielsweise die Betrachtung der Eversion des Rückfußes bei einer Außenrotation des Fußes, wie es bei den meisten Menschen zum Zeitpunkt des initialen Bodenkontaktes der Fall ist. Da allerdings durch solch ein Kamera-Setup die Information über den Grad der Außenrotation fehlt, kann nur eine ungenaue Aussage über die Rückfuß-Eversion getroffen werden. Ähnlich verhält es sich in Bezug auf Gelenkwinkel und andere Parameter: Im Gang findet beim gesunden Menschen ein Großteil der Gelenkbewegung in der Sagittalebene statt. Bei einer Videoanalyse deckt sich diese Ebene häufig mit der orthogonal zur Bewegung aufgestellten Kamera. Testpersonen mit variierenden Gangmustern wie etwa vermehrter Hüftinnenrotation weisen jedoch häufig eine Abweichung der Bewegungen gegenüber dieser Ebene auf 6. Die hierdurch hervorgerufenen Ungenauigkeiten der Messparameter sollten bei der Bewertung dieser Probanden mit Hilfe der klassischen Videoanalyse berücksichtigt werden.
3D-Kamerasysteme
Dreidimensionale (3D-)Kamerasysteme werden als der Goldstandard in der Biomechanik angesehen 7. Sie bestehen meist aus mehreren – in der Regel etwa acht bis zwölf – stationär platzierten Infrarotkameras, die mit Farbkameras kombiniert werden können. Die Informationen der Kameras werden je nach Hersteller über verschiedene Hardwarekomponenten an einen dedizierten Messcomputer weitergeleitet. Nach einem Kalibrationsprozess ist die Position der Kameras im dreidimensionalen Raum bekannt. Somit kann durch die Kombination ihrer Informationen die Position sogenannter Marker bestimmt werden. Diese Marker können je nach System retroreflektierende Kugeln, die das von den Kameras emittierte Infrarotlicht zurückwerfen, oder LEDs sein. Um die Bewegungen der Probanden zu erfassen, werden Marker an bestimmten anatomischen Landmarken positioniert. Nachdem die gewünschte Bewegung im Aufnahmevolumen der Kameras durchgeführt wurde, erfolgt eine Nachbereitung der Positionsdaten der Marker, um mögliche Lücken oder Fehldetektionen zu beseitigen. Anschließend werden die Daten der Marker in biomechanischen Computermodellen kombiniert, die Informationen wie etwa Segmentorientierung und ‑position oder Gelenkwinkel berechnen. 3D-Kamerasysteme zeichnen sich je nach Aufbau meist durch eine Genauigkeit der Positionsbestimmung eines einzelnen Markers im Millimeterbereich aus, weshalb solche Systeme vor allem im Bereich der Bewegungswissenschaften eingesetzt werden 8.
Bei der Interpretation der Daten sollte allerdings beachtet werden, dass ein gewisser subjektiver Einfluss bei der Markerplatzierung nicht ausgeschlossen werden kann, der sich auf nachgehende Berechnungen wie zum Beispiel die der Gelenkwinkel auswirkt. Deshalb sowie aufgrund der komplexen Handhabung und ggf. aufwendigen Nachbereitung wird meist geschultes Personal mit viel Erfahrung benötigt, um bei Messprozessen mit 3D-Kamerasystemen relevante und valide Daten zu erhalten. Im orthopädietechnischen Alltag ist dies durchaus ein relevanter Faktor, da dort der Fokus meist auf der Expertise bezüglich der Versorgung liegt und daher eine möglichst einfache Handhabung der Messsysteme gewünscht ist. Zudem bleibt häufig wenig Zeit für zusätzliche aufwendige Auswertungen, während die Patientinnen und Patienten versorgt werden sollen. Nicht zu vernachlässigen sind schließlich die Kosten für die Anschaffung solcher Systeme, die häufig einen sechsstelligen Euro-Betrag erreichen 9 10.
Eine weitere Limitation dreidimensionaler Kamerasysteme ist die Gebundenheit an einen Ort und die Anforderungen an diesen. In den meisten Fällen sollte ein solches System fest in einem dedizierten Raum installiert sein. Denn zur Aufzeichnung einer Gangstrecke von mehreren Metern wird ein entsprechend großes Raumvolumen benötigt, um genügend Schritte erfassen zu können. Ist ein System einmal aufgebaut und kalibriert, führt die Verschiebung einer Kamera zu großen Messabweichungen. Weiterhin können die Lichtverhältnisse die Datenqualität negativ beeinflussen. Alternativ zu markerbasierten, dreidimensionalen Kamerasystemen existieren auch markerlose Systeme, die anatomische Landmarken mittels Algorithmik bestimmen. Dadurch ist das Anbringen der Marker an den Körper und die Nachbearbeitung nicht nötig. Ein Nachteil solcher Kamerasysteme ist neben der geringeren Messgenauigkeit 11 auch der höhere Rechenaufwand des Systems, der durch die erforderliche Kombination der Bilddaten zu erklären ist 12.
Kraft- und Druckmessplatten
In Kombination mit dreidimensionalen Kamerasystemen werden häufig Kraftmessplatten zur Messung der Bodenreaktionskräfte verwendet. Diese nutzen vorwiegend piezoelektrische Sensoren oder Dehnungsmessstreifen. Somit können die dreidimensionalen Kräfte, die auf die Platte einwirken, aufgezeichnet werden. In Kombination mit Positionsdaten eines dreidimensionalen Kamerasystems können die Kräfte und Drehmomente, die auf verschiedene Körperteile wirken, berechnet werden. Zur Optimierung der Messqualität sind Kraftmessplatten häufig in den Boden eingelassen und fest in einer vibrationsarmen Umgebung verbaut. Aus diesem Grund eignen sie sich nicht für den portablen Gebrauch.
Im Gegensatz zu dynamischen Messungen können Kraftmessplatten auch für eine statische Beurteilung des Stehens genutzt werden. In diesem Fall ist meist der Kraftangriffspunkt in Relation zum Körperschwerpunkt, bestimmten Segmenten oder Prothesen von Interesse. Ein solches System stellt das „3D‑L.A.S.A.R‑Posture“ der Firma Ottobock dar, das im Unterschied zu anderen häufig genutzten Kraftmessplatten portabel ist. Ebenfalls sind Druckmessplatten – je nach Größe – häufig portabel. Sie messen den in vertikaler Richtung einwirkenden Druck mit einer von der gewünschten Auflösung abhängigen Anzahl an Drucksensoren (oft mehrere pro Quadratzentimeter). Somit ist eine Beurteilung des Drucks unter den verschiedenen Segmenten des Fußes möglich, worauf beispielsweise der Aufbau einer Einlage basieren kann. Eine Ableitung dreidimensionaler Kräfte und/oder Drehmomente, die auf verschiedene Körpersegmente einwirken, ist mit Druckmessplatten dagegen nicht möglich.
Inertiale Messeinheiten (IMUs)
Eine Alternative zu den zuvor genannten Systemen bieten auf sogenannten Inertialsensoren (engl. „inertial measurement unit“, kurz IMU) basierende Systeme. Moderne Inertialsensoren bestehen aus dreiachsigen Gyroskopen, Beschleunigungsmessern und häufig Magnetometern 13. Durch die Fusion der einzelnen Sensortypen kann beispielsweise die Orientierung des Sensors im Raum abgeschätzt werden. Eine einzelne Inertialsensor-Einheit ist meist deutlich kleiner als eine Streichholzschachtel. Für den Einsatz in der Bewegungsanalyse werden Inertialsensoren an den zu betrachtenden Segmenten angebracht, um deren Bewegungen zu erfassen. Durch Kombination der Bewegungsdaten einzelner Segmente können nach einer Aufnahme – beispielsweise über biomechanische Modelle – Gelenkwinkel, Beschleunigungen und weitere Parameter berechnet werden.
Ein grundlegender Unterschied in der Messtechnik von Inertialsensoren gegenüber Kamerasystemen ist die Messgröße: Während Kamerasysteme eine Position bestimmen und Größen wie Winkel, Geschwindigkeiten und Beschleunigungen davon abgeleitet werden, messen Inertialsensoren die Änderung des Bewegungszustandes durch Beschleunigung und Winkelgeschwindigkeit 14. Das hat zur Konsequenz, dass die unterschiedlichen Messsysteme in verschiedenen Parametern eine höhere Genauigkeit aufweisen. So werden Beschleunigungen und Winkelgeschwindigkeiten von Inertialsensoren genauer bestimmt, während absolute Positionen von Kamerasystemen genauer erfasst werden können: Durch das Anbringen von Markern an anatomischen Landmarken im Falle eines 3D-Kamerasystems lässt sich die Bewegung des menschlichen Skeletts annähern, wobei allerdings immer eine gewisse Abweichung zwischen Realität und Messgröße bleibt. Diese Möglichkeit besteht bei einem Inertialsensor-System nicht: Da ein unbekannter Offset zwischen Knochen und Inertialsensor eines jeweiligen Segments besteht, wird häufig eine Referenzposition mit bekannten Gelenkstellungen eingenommen, um diesen Offset zu bestimmen. Dies kann beispielsweise über eine Standreferenz in Neutral-Null-Stellung oder eine Sitzreferenz mit 90° Beugung von Hüft- und Kniegelenken in der Sagittalebene realisiert werden.
Die Berechnung von Distanzen mittels Inertialsensoren ist für klinische Applikationen nach aktuellem Stand der Wissenschaft nicht mit ausreichender Genauigkeit möglich. Die Abweichung einer solchen Berechnung würde in vielen Fällen die zu detektierende Änderung überschreiten. Die Schrittlänge ist ein häufiger Indikator für eine Vielzahl von Gangmustern. Trotz der Fortschritte im Bereich der Schrittlängenschätzung mittels Inertialsensoren ist die erreichte Messgenauigkeit für viele Fragestellungen noch nicht ausreichend 15. Beispielsweise wurde im Zuge von Untersuchungen über die Abnahme der Schrittlänge im hohen Alter eine jährliche Abnahme der Schrittlänge von 1 bis 2 cm festgestellt 16. Diese liegt unter dem zu erwartenden Fehler der Schrittlängenbestimmung mittels Inertialsensoren. Ist die Messgenauigkeit niedriger als die zu messende Abnahme, kann diese nicht valide detektiert werden. Somit ist die Validität der Bestimmung von Parametern wie der Schrittlänge für klinische Anwendungen mittels Inertialsensoren zum jetzigen Zeitpunkt nicht gegeben.
Im Bereich der Biomechanik zeigte sich in den letzten Jahren ein immer größer werdendes Interesse an Inertialsensoren 17, das sich durch den technologischen Fortschritt auf diesem Gebiet begründen lässt. So konnten Größe und Kosten der Einheiten gesenkt werden 18, was einen portablen und vielseitigen Einsatz eines Systems ermöglicht. Dies ist deshalb von großer Bedeutung, da Laborumgebungen nach wissenschaftlichen Erkenntnissen psychologische Auswirkungen auf die Probanden haben können 19 20, was die Generalisierung der Ergebnisse beeinträchtigen kann. In der praktischen Anwendung können somit also nicht nur standortabhängige Analysen in Praxen und Sanitätshäusern durchgeführt werden, sondern die Systeme auch in häuslicher Umgebung der Patientinnen und Patienten genutzt werden. Der Vorteil eines portablen Inertialsensor-Systems liegt für orthopädietechnische Häuser also vor allem darin, dass weder große finanzielle noch räumliche Kapazitäten benötigt werden, um es nutzen zu können. So kann die Datenaufnahme eines Gangbildes zum Beispiel in Fluren oder anderen Räumlichkeiten durchgeführt werden, ohne dafür eine spezielle Laborumgebung zu schaffen.
Einsatzbeispiel von IMUs im Sanitätshaus
Versorgungen – vor allem im höheren Preissegment – waren und sind immer wieder Anlass für langwierige Verfahren bei Kostenträgern, bei denen es aus Sicht der verschiedenen Parteien um die Frage geht, ob die jeweiligen Kosten für eine Versorgung gerechtfertigt sind oder nicht. Naturgemäß entstehen dabei häufig verhärtete Fronten zwischen Krankenkassen auf der einen und Versicherten, Ärztinnen und Ärzten sowie Fachleuten aus den Sanitätshäusern auf der anderen Seite. So kommt es nicht selten zu teils monatelangen Prozessen. Am Ende geht dies vor allem zu Lasten der Patientinnen und Patienten, die dadurch wertvolle Zeit verlieren, innerhalb derer sie die Versorgung längst benötigen. Dies lässt sich deutlich am Beispiel der Funktionellen Elektrostimulation (FES) für das Gehen aufzeigen: Vor einigen Jahren noch zur Gänze abgelehnt, sind Kostenträger mehr und mehr sowohl auf den unmittelbaren als auch auf den langfristigen Nutzen einer solchen Versorgung aufmerksam geworden. Der Wunsch seitens der Krankenkassen nach objektivierbaren Nachweisen für den Nutzen im konkreten Einzelfall wird dabei allerdings immer stärker – vor allem im Hinblick auf den steigenden Kostendruck, bedingt durch immer schnellere technische Entwicklungen und damit zum Teil einhergehende höhere Kosten. Um diesem wachsenden und durchaus legitimen Interesse der Kostenträger an objektiven Belegen nachzukommen, entscheiden sich immer mehr Sanitätshäuser dafür, in gegebenen Fällen eine Ganganalyse durchzuführen. Doch welche Messtechnologie lässt sich im orthopädietechnischen Alltag am besten integrieren? 3D-Kamerasysteme gelten zwar als Goldstandard und sind in der bewegungswissenschaftlichen Forschung weit verbreitet, allerdings ist der Zeitaufwand für die Vorbereitung der Patientinnen und Patienten sowie für die nachfolgende Datenauswertung meist nicht mit einem eng getakteten Tagesgeschäft vereinbar. Aus diesen Gründen finden immer öfter IMU-Ganganalysesysteme ihren Weg ins Sanitätshaus.
Das System „Bionic Pro“ (Ottobock) als typischer Vertreter von IMU-Messsystemen ermöglicht es, in kurzer Zeit die relevanten Gangparameter zu ermitteln, die für die objektive Beurteilung einer FES-Versorgung bei neurologischen Gangbildern notwendig sind. Durch die technische Umsetzung mit IMU-Sensoren verfügt das „Bionic-Pro“-System über eine ausreichende Genauigkeit im Vergleich zu dreidimensionalen kamerabasierten Ganganalysesystemen und bietet gleichzeitig den Vorteil, dass Zeitrahmen und Aufwand für Messung und Auswertung ungleich niedriger gehalten werden können.
Konkret werden im Fall einer benötigten Dokumentation der FES-Versorgung – ähnlich dem Prozedere in einem Ganglabor – zwei Settings bei den Patientinnen und Patienten miteinander verglichen: Es findet eine Messung ohne Versorgung und eine mit Versorgung statt, wodurch man die erreichte Veränderung des Gangbilds dokumentieren kann. Weiterhin können Messungen auch als Verlaufsmessungen über mehrere Messzeitpunkte hinweg erfasst werden. Die Veränderung des Gangs über einen definierten Zeitraum kann zusätzliche Erkenntnisse über Therapieerfolge oder die Gewöhnung von Patientinnen und Patienten an ihre Hilfsmittel liefern.
Bei der Auswertung der Messungen konzentriert man sich meist auf wenige variierende Kernparameter, unter anderem etwa auf das Sprunggelenk und das Kniegelenk, dabei speziell auf den Bewegungsverlauf dieser Gelenke im Verlauf des Gangzyklus. Konkret kann zum Beispiel dokumentiert werden, dass die Muskulatur durch die aktive Stimulation das Knie wieder stärker stabilisiert, was Folgeschäden vorbeugen kann. Bei der Betrachtung des Sprunggelenks wiederum kann gegebenenfalls ein wiederhergestelltes aktives Abrollverhalten dokumentiert werden, das auf eine verbesserte Gangdynamik hindeutet. Dies kann im Einzelfall dann bedeuten, dass beim Gehen weniger Ermüdung auftritt und somit wieder weitere Strecken im Alltag zurückgelegt werden können.
Eine erhöhte Mobilität ist ein maßgebliches Argument für eine Versorgung. Nachfolgend wird anhand eines konkreten Beispiels gezeigt, wie sich das Analyseergebnis eines IMU-Messsystems (in diesem Fall „Bionic Pro“ von der Firma Ottobock) im FES-Versorgungsprozess darstellt und inwiefern die Ergebnisse die Argumentation für eine Kostenerstattung unterstützen können. Wichtig zu beachten ist dabei, dass sich die nachfolgend gezogenen Schlussfolgerungen von Patient zu Patient unterscheiden können und dass daher kein Anspruch auf Allgemeingültigkeit besteht.
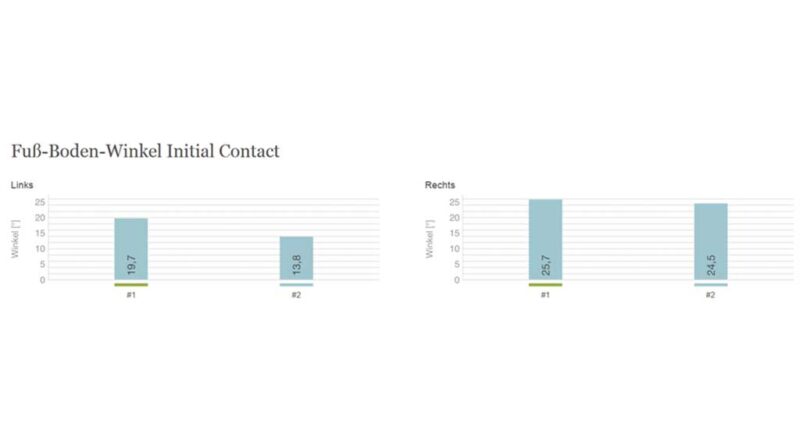
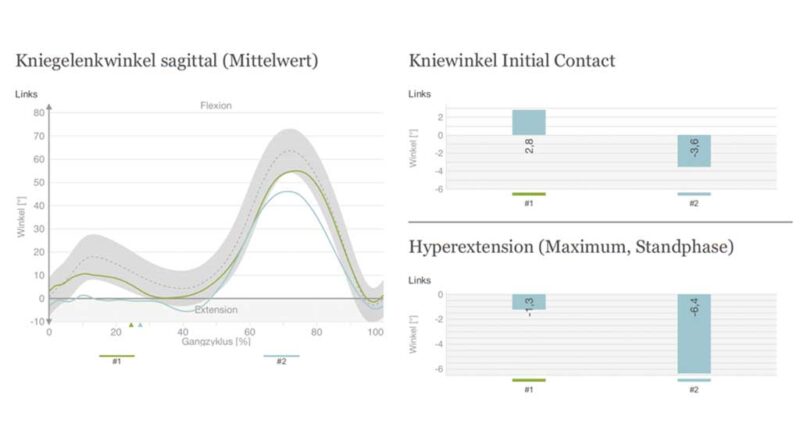
Beispielhaft zeigt Abbildung 1 einen Vergleich zwischen zwei Messungen: die eine mit Funktioneller Elektrostimulation (FES; „Bioness L300 Go“), die andere ohne Versorgung. Dargestellt ist der Unterschied des Fuß-Boden-Winkels während „initial contact“ bei einer Vergleichsmessung im Gehen mit (grün) und ohne FES (blau). Beim betroffenen linken Vorfuß konnte mit FES eine stärker ausgeprägte Dorsalextension (+ 42 %) und somit eine bessere Anhebung des Fußes gemessen werden. Dies führt in den folgenden Gangphasen zu einem besseren Abrollen, und die Werte nähern sich sichtlich denen des rechten – nicht betroffenen – Vorfußes an. Durch das verbesserte Abrollverhalten des Fußes kann die natürliche Stoßdämpfungsfunktion in „loading response“ besser realisiert werden. Dies führt unmittelbar zu einer Entlastung der beteiligten Strukturen und beugt Folgeschäden vor. Zusätzlich zum Fuß-Boden-Winkel sind in Abbildung 2 die Kniegelenkparameter derselben Messungen dargestellt. Sowohl bei „initial contact“ als auch über die Standphase konnte mit der FES-Versorgung eine stärkere Knieflexion erreicht werden, was einen physiologischeren Ablauf kennzeichnet und das Knie stabilisiert. Zusätzlich konnte die Hyperextension in der Standphase im unversorgten Zustand deutlich reduziert werden. In der folgenden Schwungphase zeigt sich bei der Messung mit FES-Versorgung eine größere Knieflexion. Insgesamt nähert sich der Kniewinkelverlauf über den gesamten Gangzyklus den Normwerten einer physiologischen Kohorte an. Diese Messwerte machen insgesamt deutlich, dass bei den beiden vorliegenden Messungen die FES-Versorgung zu einer starken Verbesserung des Gangbildes führt.
Neben dem Vergleich mit dem unversorgten Zustand sind Vergleichsmessungen mit verschiedenen Hilfsmitteln technisch möglich und können die Auswirkungen der jeweiligen Hilfsmittel auf die Kinematik des Gangs quantifizieren. Dabei ist allerdings zu beachten, dass nicht jeder Vergleich von Hilfsmitteln aufgrund der unterschiedlichen Wirkweisen sinnvoll ist. Beim Vergleich von Hilfsmitteln ist stets darauf zu achten, dass eine Vergleichbarkeit aus therapeutischer Sicht auch tatsächlich gegeben ist. In dem hier dargestellten Anwendungsfall stellt die FES-Versorgung einen aktiven Funktionsersatz für die Muskel- und Nervenansteuerung dar, was etwa im Gegensatz zu einer orthetischen Versorgung (Hilfsmittel) zusätzlich auch im neurologischen Bereich für rehabilitative Effekte sorgt. Da die medizinische Entscheidung pro/contra FES von ärztlicher bzw. therapeutischer Seite meist schon vorab anhand anderer Indikatoren getroffen wird, dient die mobile Ganganalyse in der Regel also in erster Linie zur Dokumentation und objektiven Bestätigung des Nutzens dieser Versorgung. Als einer von mehreren Bausteinen der Argumentation soll sie in Zukunft standardmäßig die raschere Abwicklung von Verfahren bei Kostenträgern unterstützen.
Fazit
Zusammenfassend ist festzustellen, dass Messtechnologie an den unterschiedlichsten Stellen im Versorgungsprozess unterstützend wirksam sein kann. Dabei reicht das Anwendungsspektrum von der Verlaufsdokumentation von z. B. Therapieprozessen bis hin zur Unterstützung bei der Optimierung des Hilfsmittelaufbaus. 3D-Kamerasysteme, Videometrie und IMU-Messsysteme konzentrieren sich auf kinematische Eigenschaften des Gangs. Dabei hat jedes der vorgestellten Systeme Vor- und Nachteile, sodass man stets die am besten passende Technologie für den eigenen Anwendungsfall ermitteln sollte. Den größten Erkenntnisgewinn erlangt man vermutlich durch eine 3D-Ganganalyse in Kombination mit Kraftmessplattendaten, da sich daraus neben den kinematischen Daten auch Kräfte und Gelenkmomente ableiten lassen. Für die kinematische Ganganalyse im orthopädietechnischen Alltag in der Patientenversorgung haben IMU-Systeme jedoch aufgrund ihrer leichten und zeiteffizienten Handhabung deutliche Vorteile gegenüber 3D-Kamerasystemen. Gleichzeitig bieten sie eine ausreichend hohe Genauigkeit, um wesentliche Gangparameter valide und reliabel zu berechnen. Zudem stehen Inertialsensorsysteme im aktuellen Fokus der biomechanischen Wissenschaft und werden daher einer ständigen Weiterentwicklung und Verbesserung unterzogen. Nicht zuletzt daher bieten sie eine zukunftsorientierte Lösung für die Bewegungsanalyse im orthopädietechnischen Alltag.
Interessenkonflikt
Der Hauptautor ist als Technical Solution Manager bei der Ottobock SE & Co. KGaA in Duderstadt tätig.
Für die Autoren:
Dr. Michael Joch
Technical Solution Manager
Bionic Analytics
Ottobock SE & Co. KGaA
Max-Näder-Straße 15
37115 Duderstadt
michael.joch@ottobock.de
Begutachteter Beitrag/reviewed paper
Martin J, Ullrich C, Joch M. Messtechnik im orthopädietechnischen Alltag am Beispiel eines inertialen Messsystems. Orthopädie Technik, 2021; 72 (12): 40–45
- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Michelini A et al. Two-dimensional video gait analysis: A systematic review of reliability, validity, and best practice considerations. Prosthetics and Orthotics International, 2020; 44 (4): 189–191
- Michelini A et al. Two-dimensional video gait analysis: A systematic review of reliability, validity, and best practice considerations. Prosthetics and Orthotics International, 2020; 44 (4): 189–191
- Michelini A et al. Two-dimensional video gait analysis: A systematic review of reliability, validity, and best practice considerations. Prosthetics and Orthotics International, 2020; 44 (4): 189–191
- Michelini A et al. Two-dimensional video gait analysis: A systematic review of reliability, validity, and best practice considerations. Prosthetics and Orthotics International, 2020; 44 (4): 189–191
- Grunt S et al. Reproducibility and validity of video screen measurements of gait in children with spastic cerebral palsy. Gait & Posture, 2010; 31 (4): 489–494
- Grunt S et al. Reproducibility and validity of video screen measurements of gait in children with spastic cerebral palsy. Gait & Posture, 2010; 31 (4): 489–494
- van der Kruk E, Reijne MM. Accuracy of human motion capture systems for sport applications; state-of-the-art review. European Journal of Sport Science, 2018; 18 (6): 806–819
- van der Kruk E, Reijne MM. Accuracy of human motion capture systems for sport applications; state-of-the-art review. European Journal of Sport Science, 2018; 18 (6): 806–819
- Ancillao Aet al. Indirect Measurement of Ground Reaction Forces and Moments by Means of Wearable Inertial Sensors: A Systematic Review. Sensors (Basel), 2018; 18 (8): 2564
- Dorschky E et al. Estimation of gait kinematics and kinetics from inertial sensor data using optimal control of musculoskeletal models. Journal of Biomechanics, 2019; 95: 109278
- Kanko RM. Validation of a Markerless Motion Capture System for Human Movement Analysis. Dissertation, Queen’s University, Kingston (Ontario, Canada), 2020. http://hdl.handle.net/1974/28019 (Zugriff am 28.10.2021)
- Kanko RM, Laende EK, Davis EM, Selbie WS, Deluzio KJ. Concurrent assessment of gait kinematics using marker-based and markerless motion capture. J Biomech, 2021; 127: 110665. doi:10.1016/j.jbiomech.2021.110665
- Norhafizan A et al. Reviews on Various Inertial Measurement Unit (IMU) Sensor Applications. International Journal of Signal Processing Systems, 2013; 1 (2): 256–262
- Filippeschi A et al. Survey of motion tracking methods based on inertial sensors: A focus on upper limb human motion. Sensors, 2017; 17 (6): 1257
- Hannink J et al. Mobile Stride Length Estimation With Deep Convolutional Neural Networks. IEEE Journal of Biomedical and Health Informatics, 2018; 22 (2): 354–362
- Hollmann JH et al. Normative spatiotemporal gait parameters in older adults. Gait & Posture, 2011; 34 (1): 111–118
- Caldas R et al. A systematic review of gait analysis methods based on inertial sensors and adaptive algorithms. Gait & Posture, 2017; 57: 204–210
- Marin F et al. Inertial measurement unit in biomechanics and sports biomechanics: Past, present, future. International Conference on Biomechanics of Sports, ISBS-Conference Proceedings Archive, 2015. https://ojs.ub.uni-konstanz.de/cpa/article/view/6698/6053 (Zugriff am 28.10.2021)
- Cutti AG et al. „Outwalk“: a protocol for clinical gait analysis based on inertial and magnetic sensors. Med Biol Eng Comput, 2010; 48 (1): 17–25
- van den Noort J et al. Gait analysis in children with cerebral palsy via inertial and magnetic sensors. Med Biol Eng Comput, 2012; 51 (4): 377–386
