Einleitung
Das im Labor für Biomechanik der Fachhochschule Münster entwickelte Messsystem ermöglicht erstmals die Ermittlung mehrdimensionaler Fußbelastungen im Schuh. Der wissenschaftliche Nachweis der Wirksamkeit orthopädischer Hilfsmittel wird im Gesundheitswesen immer wichtiger, ebenso die Anpassung von Prothesen an die Bedürfnisse des jeweiligen Trägers und die Begründung von Entscheidungen anhand objektiver Messdaten. Hierfür werden zum Beispiel Kraftmessplatten, plantare Druckverteilungsmessungen oder Kamerasysteme eingesetzt. Bei Druckmessungen werden jedoch nur die Auswirkungen eindimensionaler Kräfte, die senkrecht zu den Sensoren wirken, erhoben. So sind keine Rückschlüsse auf Scherbelastungen sowie mehrdimensionale Biege- oder Torsionsbelastungen des Fußes möglich.
Der plantare Druck zwischen Prothesenfuß und Schuh gilt in der Regel als wenig aussagekräftig hinsichtlich der Passform des Prothesenfußes. Anpassungen werden meist aufgrund visueller Überprüfungen durch den Techniker sowie des Feedbacks des Prothesenträgers durchgeführt 1. Es werden aber auch einfache Kamerasysteme zur Bestimmung der Gelenkwinkel oder die statische Analyse der Körperschwerpunktlinie eingesetzt 2. Mit dem bisherigen Stand der Technik können Momente und Kinematik nur mit immensem Messaufwand objektiv ermittelt werden. Zudem geschieht dies häufig nur unter Laborbedingungen.
Mit dem neu entwickelten Messsystem ist es nun erstmals möglich, Biege- und Torsionsmomente direkt und ohne großen Messaufwand am Prothesenfuß bzw. zwischen Fuß und Schuh zu bestimmen. Im Unterschied zu Kamerasystemen, Kraftmesssystemen und der Analyse der Körperschwerpunktlinie können mit dem neuen Messsystem die Eigenschaften des Prothesenfußes analysiert werden. Dies bezieht sich insbesondere auf das Biegemoment, welches im Sinne des „Energy-Return”-Effekts die Abrollbewegung während der terminalen Standphase unterstützt.
Das betois-Messsystem bietet die Möglichkeit, einen schnellen und mobilen Vergleich zum gesunden Fuß sowie – dank integrierter Auswertungssoftware – auch zwischen verschiedenen Prothesenfüßen herzustellen. Ein junges Gründerteam bereitet die Markteinführung für das zum Patent angemeldete betois-Messsystem („bending torsion insole system”) vor und wird hierfür vom Bundeswirtschaftsministerium ein Jahr lang gefördert.
Im Folgenden wird zunächst auf den physikalischen Hintergrund eingegangen. Anschließend erfolgt die Vorstellung des neuen Messsystems. Der zweite Teil befasst sich mit einem Anwendungsbeispiel aus der Orthopädie-Technik.
Physikalischer Hintergrund
Das Biegemoment eines Prothesenfußes während des Gehens kann mit dem betois-Messsystem bestimmt werden. Zunächst wird jedoch das Verhalten eines gesunden Fußes beschrieben. Wird zum Beispiel der Vorfuß in Bezug zum Rückfuß beim Übergang von der mittleren in die terminale Standphase dorsalextendiert 3, so müssen hierbei Biegemomente, sogenannte Dorsalextensionsmomente, wirken. Biegeverformungen oder auch Verbiegungen werden durch Biegebelastungen, sogenannte Biegemomente, hervorgerufen. Biegemomente sind physikalisch durch das Produkt aus der wirkenden Kraft und der Länge des Hebelarms definiert. Die Torsion beschreibt die Verdrehung eines Körpers, zum Beispiel des Fußes, um seine Längsachse. Eine gleichmäßige Torsion des Fußes während des Gehens kann ein Indiz für einen sicheren und stabilen Gang sein.
Betrachtet man diese Verbiegungen und Verdrehungen bei zyklischen Bewegungen wie dem Gehen, so resultiert aus dem wechselnden Plantarflexions- und Dorsalextensionsmoment bzw. der Verdrehung in Richtung Fußlängsachse und entgegengesetzt eine sogenannte Wechselbelastung, die über Druckverteilungsmessungen nicht detektiert werden kann. Das gleiche physikalische Prinzip gilt für den Prothesenfuß. Ein Unterschied besteht jedoch darin, dass ein konventioneller Prothesenfuß kein Sprunggelenk aufweist und somit die Verbiegung der gesamten Carbonfeder bestimmt wird. Betrachtet man den anatomischen Fuß, so ist es möglich, eine Dorsalextension im Sprunggelenk durchzuführen, ohne dass sich das Biegemoment unterhalb des Mittelfußes verändert. Im Gegensatz dazu führt die scheinbare Dorsalextension des Prothesenfußes zu einer Veränderung der gemessenen Biegemomente, da sich die gesamte Carbonfeder verbiegt. Aufgrund seines Aufbaus, der teilweise mit einer Feder verglichen werden kann, löst sich in der terminalen Standphase die Verformung der Carbonfeder wieder auf, wodurch die oben beschriebene Unterstützung des Abrollverhaltens erfolgt.
Das betois-Messsystem
Bei betois (Abb. 1) handelt es sich um ein neues Innensohlenmesssystem für die Ermittlung von Biege- und Torsionsbelastungen am Fuß. Das „Key Feature” der Messsohle ist eine speziell geformte, elastische Trägerschicht, an der an verschiedenen Messstellen Dehnungsmesssensoren positioniert sind. Durch die spezielle Form des Trägers können Biege- und Torsionsmomente im Schuh in verschiedenen Fußarealen unabhängig analysiert werden. Die Sensoranordnung und ‑verschaltung ermöglicht eine parallele Aufnahme von Biege- und Torsionsbelastungen. Messstellen befinden sich beispielsweise proximal der distalen Interphalangeal-Gelenke I (DIP I) und V (DIP V), proximal der Metatarsophalangeal-Gelenke I (MTP I) und V (MTP V) sowie distal des Processus calcaneus. Die Datenaufnahme erfolgt über einen Analog-digital-Wandler, der die Daten kabellos mittels Bluetooth überträgt. Mit einer Messfrequenz von bis zu 125 Hertz können alltägliche sowie langsame sportliche Aktivitäten – zum Beispiel Gehen und Joggen – untersucht werden. Die Messsoftware ermöglicht eine schnelle, automatische Auswertung von Standardparametern von bis zu vier Untersuchungsbedingungen (z. B. verschiedene Prothesenfüße) für die tägliche Praxis sowie den Export der Rohdaten für wissenschaftliche Untersuchungen.
Die Resultate der Kalibrierung mit einem Bestimmtheitsmaß von R2 > 0,999 und einem Linearitätsfaktor von fast 1 zeigen, dass mit dem entwickelten Messsystem Biege- und Torsionsmomente direkt und reliabel zu detektieren sind, dass also die festgestellten Werte zuverlässig messbar sind.
Anwendungsbeispiel
Im Labor für Biomechanik der FH Münster wurden für die Erstellung von Normdaten für die Biege- und Torsionsmomente zwischen Fuß und Schuh 27 gesunde Probanden (9 Frauen) im Alter zwischen 20 und 38 Jahren vermessen. Im Durchschnitt waren sie 177,4 cm (± 6,1 cm) groß und 74,4 kg (± 9,5 kg) schwer. Die Probanden gingen mit einer Geschwindigkeit von 2,5 km/h auf einem Laufband und trugen alle das gleiche Schuhmodell (Saucony Hattori LC). Dieser Schuh wurde gewählt, da er eine sehr hohe Flexibilität aufweist und somit die gemessenen Werte möglichst wenig von der Steifigkeit des Schuhs beeinflusst werden. Die durch das Zusammenspiel von Fuß und Schuh auf die Messsohle ausgeübten Biege- und Torsionsmomente wurden mit Hilfe von betois nach einer Eingewöhnungsphase von fünf Minuten eine Minute lang aufgezeichnet. Anschließend wurden 30 Doppelschritte gemittelt und auf 100 % des Gangzyklus (101 Datenpunkte) normiert.
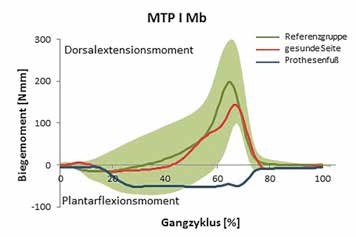
Abbildung 2 zeigt die Biegemomentenverläufe proximal des MTP I. Verläuft die Kurve im positiven Bereich, so wird ein Dorsalextensionsmoment gemessen, bei negativen Werten handelt es sich um Plantarflexionsmomente. Die grüne Linie in Abbildung 2 stellt den Mittelwertverlauf über alle Probanden mit dem dazugehörigen 95-%-Konfidenzintervall (hellgrüne Fläche) dar. Das Konfidenzband beschreibt den Vertrauensbereich, d. h., in diesem Bereich liegt mit einer 95-prozentigen Wahrscheinlichkeit der wahre Mittelwert der Population. Konfidenzbänder werden häufig als Screening-Methode eingesetzt, um pathologische Abweichungen zu detektieren.
Zu Beginn der Standphase kann kein Biegemoment bzw. nur sehr geringe Biegemomente gemessen werden (siehe Abb. 2, grüne Linie). Erst ab ca. 10 % des Gangzyklus tritt ein Moment in Richtung Plantarflexion auf. Dieses steigt langsam an und hat sein Maximum von –15 Nmm während der mittleren Standphase bei 22 % des Gangzyklus 4. Ab ca. 35 % des Gangzyklus wechselt der Verlauf in Richtung Dorsalextension. Hierbei steigt der Verlauf in diesem Bereich zunächst weiter langsam an. Bei 50 % des Gangzyklus nimmt das Moment stärker zu und hat bei 64 % des Gangzyklus sein Maximum von 197 Nmm. Anschließend fällt das Biegemoment stark ab. Während der Schwungphase tritt keine Momentenbelastung am MTP I auf. Aufgrund des beschriebenen Verlaufs kann festgestellt werden, dass eine Wechselbelastung, d. h. Momente in Richtung einer Plantarflexion und einer Dorsalextension, an MTP I während des Gehens auftritt.
Biegebelastungen am Fuß haben Arndt und Kollegen ebenfalls untersucht. In einer In-vivo-Studie wurde ein Messaufnehmer invasiv in den Metatarsalknochen II der Probanden eingebracht. In der Studie von Arndt et al. konnte ebenfalls eine Wechselbelastung der Knochen festgestellt werden, indem Zug- und Druckspannungen gemessen wurden. Aufgrund der gemessenen Biege- und Torsionsmomente im Interface zwischen Fuß und Schuh können zwar keine direkten Rückschlüsse auf die Belastung im Knochen gezogen werden, die ermittelten Verläufe entsprechen jedoch in ihrer Charakteristik den von Arndt und Kollegen ermittelten Biegebelastungen 5.
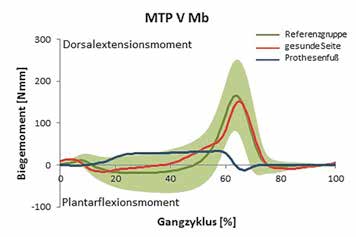
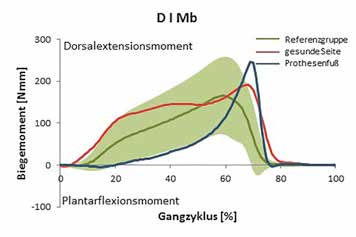
Die Ergebnisse zeigen, dass betois für die Untersuchung von Biegebelastungen des Fußes im Schuh geeignet ist. Abbildung 3 zeigt den Biegemomentenverlauf proximal des MTP V. Die grüne Linie stellt auch hier den mittleren Verlauf der 27 gesunden Probanden dar. Für den gesamten Gangzyklus lässt sich erkennen, dass das auftretende Biegemoment einen ähnlichen Verlauf wie an der Messstelle proximal MTP I aufweist. Der Wechsel der Belastung von Plantarflexion in Richtung Dorsalextension findet in Bezug auf den normierten Gangzyklus bei 50 % statt. Dies ist 15 % später als an MTP I. Zudem ist das gemessene Dorsalextensionsmaximum mit 166 Nmm leicht geringer. Im Gegensatz zu den Verläufen an den beiden Messstellen im Bereich des Mittelfußes zeigt das gemessene Biegemoment unterhalb der Großzehe einen veränderten Verlauf. Dieser ist in Abbildung 4 grün dargestellt. Für diesen Messbereich werden ausschließlich Dorsalextensionsmomente gemessen. Die ersten Abweichungen von der Nulllinie treten bei ca. 10 % des Gangzyklus auf. Daraufhin steigt das gemessene Biegemoment in Richtung Dorsalextension langsam an, bis es bei 59 % des Gangzyklus sein Maximum von 165 Nmm erreicht. Anschließend fällt die Kurve langsam ab, und auch hier werden im Bereich der Schwungphase keine auftretenden Momente gemessen.
Einzelfallstudie: Biegemomente eines Probanden mit Unterschenkelamputation
In einer Einzelfallstudie wurde ein 35-jähriger Proband (176 cm, 92 kg) mit Unterschenkelamputation auf dem Laufband mit betois vermessen. Dieser Proband ging ebenso wie die Kontrollgruppe mit einer Geschwindigkeit von 2,5 km/h. Die auftretenden Biege- und Torsionsmomente des Prothesenfußes wurden mit Hilfe des neuen Messsystems nach einer Eingewöhnungsphase von fünf Minuten eine Minute lang aufgezeichnet. Bei dem verwendeten Prothesenfuß handelt es sich um den Variflex Evo Kat. 6 der Firma Össur.
Die Mittelwertverläufe dieser Messung sind ebenfalls in Abbildung 2 dargestellt. Die rote Kurve stellt den Biegemomentenverlauf des kontralateralen, gesunden Fußes proximaldes MTP I dar. Es lässt sich erkennen, dass sich der gesamte Kurvenverlauf im Bereich der grünen Fläche und dementsprechend im 95-%-Konfidenzintervall der gesunden Vergleichsgruppe befindet. Sie weicht lediglich im Übergang von der Stand- zur Schwungphase etwas verstärkt von der Mittelwertkurve der Vergleichsgruppe ab. Sie liegt aber dennoch im Bereich des 95-%-Konfidenzbandes. Somit können keine Unterschiede für die kontralaterale Seite im Vergleich zur Kontrollgruppe festgestellt werden. Für die Prothesenseite (siehe Abb. 2, blaue Linie) lässt sich ein veränderter Verlauf erkennen: Zu Beginn der Standphase befindet sich der Verlauf ebenfalls in der hellgrünen Fläche. Es tritt in diesem Fall ein Plantarflexionsmoment auf. Dies bleibt auch nach 30 % des Gangzyklus bestehen. Von 26 % des Gangzyklus bis 64 % bildet der Verlauf ein Plateau mit –50 Nmm. Anschließend nimmt das Moment wieder ab. Es lässt sich deutlich erkennen, dass im Übergang zur Schwungphase der Verlauf stark von der Vergleichsgruppe abweicht.
Für die Biegemomente zwischen Prothesenfuß und Schuh werden reine Plantarflexionsmomente gemessen. Auch in diesem Fall können während der Schwungphase keine Momente gemessen werden. Betrachtet man die Messstelle an MTP V (Abb. 3, blaue Kurve) der Prothesenseite, so kann auch hier ein Unterschied gegenüber der Vergleichsgruppe festgestellt werden. An dieser Messstelle verläuft das Biegemoment gespiegelt zum Verlauf an MTP I. Das bedeutet, dass über den gesamten Gangzyklus fast ausschließlich Momente in Richtung Dorsalextension gemessen werden. Der Verlauf steigt ab 10 % des Gangzyklus leicht an und bildet dann ebenfalls ein Plateau, welches bei 30 Nmm liegt. Ab ca. 60 % des Gangzyklus im Übergang zur Schwungphase ändert sich die Richtung, und es wird ein geringes Plantarflexionsmoment (–12 Nmm) gemessen. Die Prothesenseite weist auch hier gerade im Bereich der Zehenablösung einen deutlich veränderten Verlauf auf. Demgegenüber liegt der Verlauf der kontralateralen, gesunden Seite (siehe Abb. 3, rote Kurve) im hellgrünen Bereich und zeigt somit keine Unterschiede zur Vergleichsgruppe. Im Bereich der Zehen werden für die Messstelle auf Höhe von D I vergleichbare Verläufe wie in der Vergleichsgruppe gemessen. Beide Verläufe sind in Abbildung 4 dargestellt. Die Mittelwertkurve der Vergleichsgruppe verläuft hauptsächlich im positiven Bereich und hat ihr Dorsalextensionsmaximum mit 165 Nmm bei 59 % des Gangzyklus, also unmittelbar vor der Zehenablösung 6. Der Biegemomentenverlauf der Prothesenfußseite an der Messstelle D I verläuft zu Beginn der Standphase am unteren Rand des 95-%-Konfidenzbandes. Auch das Maximum an dieser Messstelle liegt zeitlich verschoben außerhalb des Konfidenzbandes. Es tritt verspätet bei 68 % des Gangzyklus auf und ist mit 245 Nmm deutlich erhöht. Vergleicht man diesen Wert mit dem 95-%-Konfidenzband des Maximums, so liegt der gemessene Wert aber dennoch innerhalb dieses Bereichs.
Diskussion
Die vorliegenden Ergebnisse der Vergleichsgruppe zeigen, dass mit betois die Verformung des Fußes und somit die Biege‑, Torsions- und Wechselbelastungen mobil gemessen werden können. Dabei muss beachtet werden, dass am anatomischen Fuß die Biege- und Torsionsmomente, die zwischen Fuß und Schuh wirken, gemessen werden. Da ein konventioneller Prothesenfuß kein Sprunggelenk besitzt, wird hier mit der betois-Sohle ein Biegemoment am Prothesenfuß gemessen, welches für die Energierückgabe verantwortlich ist und somit ein Qualitätsmerkmal darstellt. Das bedeutet, dass bei den beiden vorgestellten Ergebnissen unterschiedliche Ausgangsbedingungen bestehen. Es kann in einem ersten Schritt gezeigt werden, dass im Bereich des Mittelfußes am anatomischen Fuß Wechselbelastungen auftreten. Eine Ermittlung dieser Wechselbelastungen ist beispielsweise über Druckmesssysteme nicht möglich. Es muss in einem weiteren Schritt untersucht werden, welchen Einfluss diese Belastungen auf die Entstehung verschiedener orthopädischer Erkrankungen wie z. B. Marschfrakturen oder Ulzerationen haben.
Der Vergleich der Biegemomente zwischen Prothesenfuß und Schuh mit einer gesunden Vergleichsgruppe zeigt, dass Unterschiede gerade im Bereich des Mittelfußes bestehen. Diese Feststellung war zu erwarten, da der Prothesenfuß ein anderes Biegemoment auf die Sohle ausübt als ein anatomischer Fuß. Inwieweit bzw. in welche Richtung sich die Biegebelastungen unterscheiden, konnte erstmals mit dem betois-System gezeigt werden. Mit der Prothesenversorgung treten deutlich geringere Biegemomente auf. Diese Unterschiede werden gerade im Übergang zwischen Stand- und Schwungphase deutlich. Ein möglicher Hauptgrund kann die zu geringe Flexibilität des Prothesenfußes für den untersuchten Probanden sein. Eine Simulationsstudie von Fey et al. aus dem Jahr 2013 hat gezeigt, dass die Steifigkeit des Prothesenfußes großen Einfluss auf die Muskelaktivität hat und somit den gesamten Gang beeinflussen kann 7. Die genauen Ursachen für die in dieser Einzelfallstudie festgestellten Unterschiede müssen weiter untersucht werden.
Eine weitere mögliche Ursache ist die Positionierung der Messstellen. Liegen diese nicht im Kontaktbereich, so kann die Messsohle in den Hohlraum unterhalb der Feder gedrückt und somit eine Verbiegung in Richtung Plantarflexion hervorgerufen werden. Dies zeigt sich auch an den Unterschieden des Verlaufes zwischen MTP I und MTP V des Prothesenfußes. An MTP I wird ein reines Plantarflexionsmoment, an MTP V dagegen ein Dorsalextensionsmoment gemessen. Da bislang nur die Belastung zwischen Fuß und Schuh und nicht zwischen Prothesenfuß und Schuh gemessen wurde, muss hier die Positionierung der Messstellen am Prothesenfuß überprüft werden.
Wie oben bereits erwähnt, stellt die Steifigkeit der Feder einen weiteren Einflussfaktor dar. Im Bereich des Mittelfußes ist die Feder deutlich steifer als ein menschlicher Fuß, der in diesem Bereich eine größere Verformung zulässt. Dies lässt sich auch an den Biegemomenten in Abbildung 4 erkennen. Der Kurvenverlauf der blauen Kurve (Prothesenseite) steigt im Vergleich zur Mittelwertkurve deutlich langsamer an. Zusätzlich fällt die Kurve zum Ende der Standphase steiler ab. In dieser Arbeit wurde nicht überprüft, wie weit die Feder des Prothesenfußes in den Schuh bzw. auf der Messsohle reichte. Aus diesem Grund kann der unterschiedliche Verlauf über zwei Ansätze erklärt werden: Reicht die Feder des Prothesenfußes nicht bis in die Schuhspitze hinein, so ist in diesem Bereich eine große Verbiegung des Schuhes möglich. Dies kann das relativ hohe maximale Dorsalextensionsmoment erklären. Zum anderen kann auch hier die Steifigkeit der Feder Grund für den Verlauf sein. Dies zeigt sich sowohl am steilen Abfall der Kurve als auch am relativ langsamen Anstieg, der unterhalb des 95-%-Konfidenzintervalls liegt. Dies kann abschließend nicht geklärt werden. Die Sohle kann dementsprechend auch zur Untersuchung der Steifigkeit verschiedener Prothesenfüße eingesetzt werden. Zurzeit wird die Steifigkeit mit Hilfe von Testmaschinen bestimmt. Eine mobile Erfassung während des Ganges ist bis jetzt nicht möglich 8. Vielmehr werden über aufwendige Finite-Elemente-Berechnungen verschiedene Prothesenfüße auf ihre Belastung hin untersucht 9 10. Des Weiteren kommen plantare Druckverteilungsmessungen und Kraftmessungen zur Beurteilung von Prothesen zum Einsatz 11. Gerade plantare Druckverteilungsmessungen sind jedoch wie oben bereits erwähnt nicht in der Lage, mehrdimensionale Belastungen zu erfassen, da lediglich eine eindimensionale Kraftkomponente gemessen wird, die senkrecht zum Sensor wirkt.
Betois stellt somit ein neues Messsystem dar, welches neue Parameter zur Bewertung und Analyse prothetischer und orthetischer Versorgungen bietet. Das Messsystem ist demnach geeignet, Biegemomente in einem federnden Prothesenfuß zu erfassen. Zu beachten ist dabei, dass die Ergebnisse auf der Untersuchung eines Probanden beruhen. Um allgemeingültige Aussagen für prothetische Fragestellungen zu treffen, bedarf es weiterer wissenschaftlicher Studien mit einer höheren Zahl von Probanden.
Fazit
Das neue Innensohlen-Messsystem stellt unter anderem bei Wirksamkeitsnachweisen orthopädischer Hilfsmittel eine einzigartige Ergänzung zu herkömmlichen Untersuchungsmethoden dar. Es kann in der Orthopädie-Technik durch die dynamische Überprüfung der Abrollung bei der Wahl des Prothesenfußes, dessen Justierung und Anpassung sinnvoll eingesetzt werden. Zum Zeitpunkt der Messungen befand sich das Messsystem in einem Prototypen-Status. Es ist zur Zeit noch nicht frei erhältlich. Forschungsprojekte und Auftragsmessungen werden jedoch bereits durchgeführt.
Für die Autoren:
M. Sc. Nora Dawin, EXIST-Gründerstipendiatin
Fachhochschule Münster
Gründerraum M108
Stegerwaldstraße 39
48565 Steinfurt
nora.dawin@fh-muenster.de
Begutachteter Beitrag/reviewed paper
Kerkhoff A, Dawin N, Stief T, Seeßle M, Peikenkamp K. Innovatives Messsystem bietet neue Möglichkeiten der Bewegungsanalyse in der Prothetik. Orthopädie Technik, 2014; 65 (12): 30–34

- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Tober H, Tscheuschner R. Objektivierung der Prothesenversorgung mittels Ganganalyse. Orthopädie Technik, 2005 (9): 640–645
- Blumentritt S. A new biomechanical method for determination of static prosthetic alignment. Prosthetics and Orthotics International, 1997; 21 (2): 107–113
- Wolf S, Simon J, Patikas D, Schuster W, Armbrust P, Döderlein L. Foot motion in children shoes – A comparison of barefoot walking with shod walking in conventional and flexible shoes. Gait & Posture, 2008; 27 (1): 51–59
- Perry J. Ganganalyse. Norm und Pathologie des Gehens. München, Jena: Urban und Fischer, 2003
- Arndt A, Ekenman I, Westblad P, Lundberg A. Effects of fatigue and load variation on metatarsal deformation measured in vivo during barefoot walking. Journal of Biomechanics, 2002; 35 (5): 621–628
- Perry J. Ganganalyse. Norm und Pathologie des Gehens. München, Jena: Urban und Fischer, 2003
- Fey NP, Klute GK, Neptune RR. Altering prosthetic foot stiffness influences foot and muscle function during below-knee amputee walking: A modeling and simulation analysis. Journal of Biomechanics, 2013; 46 (4): 637–644
- Geil MD. Energy Loss and Stiffness Properties of Dynamic Elastic Response Prosthetic Feet. JPO Journal of Prosthetics and Orthotics, 2001; 13 (3): 70–73
- Bonnet X, Pillet H, Fode P, Lavaste F, Skalli W. Finite element modelling of an energy-storing prosthetic foot during the stance phase of transtibial amputee gait. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 2011; 226 (1): 70–75
- Omasta M, Paloušek D, Návrat T, Rosický J. Finite element analysis for the evaluation of the structural behaviour, of a prosthesis for trans-tibial amputees. Medical Engineering & Physics, 2012; 34 (1): 38–45
- Castro MP, Soares D, Mendes E, Machado L. Plantar Pressures and Ground Reaction Forces During Walking of Individuals With Unilateral Transfemoral Amputation. PM&R, 2014; 6 (8): 698–707.e1
