Einleitung
Mit zunehmendem Alter nehmen Muskelkraft und Leistung ab. Bei den Knieextensoren kann es zu einer Reduzierung um bis zu 30 % kommen 1 2. Der Verlust an Muskelkraft und eine damit einhergehende Schwäche können zu funktionellen Einschränkungen im täglichen Leben führen. Genau dieses Defizit greift der Freizeitsektor mit der Einführung von Pedelecs – Fahrrädern mit elektrischer Tretkraftunterstützung – auf, welche vom Markt mit großem Erfolg angenommen werden.
Auch bei alltäglichen Aktivitäten kann Schwäche zum limitierenden Faktor werden. Ist das Gehen in der Ebene noch uneingeschränkt möglich, muss für das Aufstehen aus dem Sitzen (STS) oder das Treppensteigen bis zu einem Dreifachen an Kniedrehmoment generiert werden. Die kniestreckende Muskulatur wird bei diesen Bewegungen besonders gefordert. Abnehmende Muskelkraft steht im Konflikt mit dem Wunsch, ein hohes Maß an Selbstständigkeit im Alter zu bewahren. Das Aufstehen aus dem Sitzen ist immer die Voraussetzung für das Gehen. Einschränkungen der Mobilität beeinträchtigen auch den allgemeinen Gesundheitszustand. So sind Effekte sowohl auf das Herz-Kreislauf-System als auch auf das seelische Wohlbefinden bekannt 3 4.
Um ein autarkes Leben so lange wie möglich zu erhalten, stehen verschiedene Hilfsmittel zur Verfügung. Für ein erleichtertes Aufstehen sind Badewannensitze, Toilettensitzerhöhungen, Haltegriffe oder Aufstehstühle erhältlich. Treppenlifte oder Aufzüge ermöglichen das Überwinden von Höhenunterschieden. Diese Hilfsmittel sind jedoch ortsgebunden und stehen lediglich in einem umgerüsteten Umfeld zur Verfügung. Eine Unterstützung im Außenbereich kann zwar durch assistierende Personen erfolgen. Diese Hilfe kann von Angehörigen heutzutage häufig nicht geleistet werden. So sind ältere Menschen länger auf sich alleine gestellt und müssen, sobald sie auf Assistenz angewiesen sind, in betreuende Einrichtungen umziehen oder Fremde in ihren Tagesablauf mit einbeziehen. Vor diesem Hintergrund wurde das Ziel formuliert, eine aktiv unterstützende Orthese als vom Nutzer im Alltag mitführbares System zu entwickeln. Das fehlende Drehmoment soll von außen eingebracht werden. Um externe Kräftean den Menschen zu koppeln, eignen sich Orthesen als mobiles System, da über einen guten Formschluss eine gute Kraftübertragung erreicht werden kann. Motorisierte Orthesen, die meist hüftübergreifend die kompletten unteren Extremitäten einfassen, wurden bereits für die militärische Nutzung entwickelt 5 6 7. Diese sogenannten Exoskelette sollen Soldaten dazu befähigen, schwerere Lasten zu tragen oder die maximal mögliche Laufstrecke zu erhöhen. Auch im medizinischen Bereich, beispielsweise bei der Therapie von Paraplegikern, wurden bereits motorisierte Orthesen entwickelt 8. Diese finden derzeit im Umfeld der Therapie Anwendung.
Der wesentliche Unterschied des hier beschriebenen Projektes gegenüber bisherigen Entwicklungen besteht im Prinzip in der Restkraftverstärkung und der Zielgruppe von motorisch gesunden, jedoch schwachen Personen. Die Mobilität soll gefördert werden, indem der Nutzer immer dann mit einem zusätzlichen Drehmoment am Knie unterstützt wird, wenn die eigene Kraft zur sicheren Bewältigung der Situation nicht vollständig ausreicht. Das Aufstehen aus dem Sitzen wurde hierzu als erste Anwendung definiert, da hier das erforderliche Kniedrehmoment bereits doppelt so groß wie beim Gehen in der Ebene ist. Während anderer Tätigkeiten, die aus eigener Kraft erfolgen können, soll die Orthese ihren Nutzer nicht beeinträchtigen.
Innerhalb des vorgestellten Gemeinschaftsprojektes kooperieren Ingenieure der TU Darmstadt aus dem Institut für elektromechanische Konstruktion sowie des Fachbereichs Regelungstechnik und Mechatronik mit dem Bereich Bewegungsanalyse der Klinik für Orthopädie und Unfallchirurgie am Universitätsklinikum Heidelberg.
Referenzdatenerhebung
Als Datengrundlage für den Aufbau der aktiven Orthese wurden zunächst Referenzdaten der Aufstehbewegung erhoben. Elf Probanden durchliefen das Versuchsprotokoll. Bei der Auswahl wurde lediglich berücksichtigt, dass ein gesunder Allgemeinzustand und keine Einschränkungen des Bewegungsapparates vorliegen. Das Probandenkollektiv besteht aus fünf Frauen und sechs Männern (74,2 kg ± 14,3 kg; 1,78 m ± 0,09 m; 28,9 Jahre ± 8,2 Jahre).
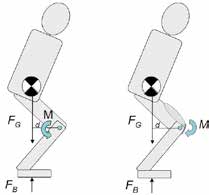
Mittels instrumenteller 3‑D-Bewegungsanalysen ist es möglich, Bewegungen über räumliche und zeitliche Erfassung von Markerkugeln an einem Probanden zu quantifizieren. Im Boden eingelassene Kraftmessplatten messen die Bodenreaktionskräfte unter dem Fuß des Probanden in drei Raumrichtungen. Über ein zugrunde liegendes biomechanisches Modell 9 10 lassen sich aus diesen Informationen sowohl die Bewegung der Gelenke (Kinematik) als auch extern wirkende Gelenkdrehmomente (Kinetik) berechnen. Sind die externen Gelenkdrehmomente bekannt, lässt sich auf die internen von der Muskulatur gegenhaltenden Gelenkdrehmomente schließen (Abb. 1). Die Aufnahmen der Markerbewegung erfolgen über ein 12-Kamera-System (Vicon Motion Systems Ltd., Oxford, Großbritannien). Bodenreaktionskräfte werden mittels dreier Kraftmessplatten erfasst (Kistler, Ostfildern, Deutschland).
Messprotokoll
Pro Proband werden jeweils zehn Aufstehvorgänge aufgezeichnet. Diese erfolgen von einer höhenverstellbaren Bank, die so ausgerichtet ist, dass jeweils ein Fuß des Probanden auf einer Kraftmessplatte positioniert wird. Eine zusätzliche Stütze unter der Bank stellt den Kontakt zu einer dritten Kraftmessplatte her (Abb. 2). So kann der Zeitpunkt im Verlauf der Bewegung bestimmt werden, wenn der Proband die Sitzfläche verlässt (Seat-off= SO). Die Sitzhöhe wird an die Unterschenkellänge angepasst. Die Probanden sind angewiesen, aus frei gewählter Sitzposition mit selbst gewählter Geschwindigkeit aufzustehen.
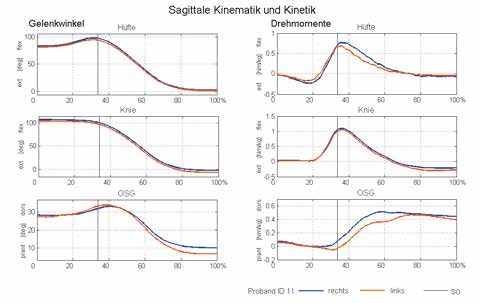
Aus den zehn Aufstehvorgängen wird pro Proband von Beginn der Aufstehbewegung bis zum Erreichen des aufrechten Stands eine mittlere Kinematik und Kinetik der unteren Extremitäten bestimmt und für die Sagittalebene als Zeitreihen dargestellt. Das maximale Kniedrehmoment wird für jeden Durchgang bestimmt.
Im Intervall zwischen Start der Bewegung und SO nimmt die Hüftflexion bis 100° zu. Nach dem SO erfolgt im Hüftgelenk eine nahezu lineare Extension, bis im aufrechten Stand eine Nullstellung erreicht ist. Das Kniegelenk verharrt im Flexionswinkel der Startposition, die Extension beginnt kurz vor dem SO. Der aufrechte Stand und damit das Ende des Aufstehvorgangs ist erreicht, wenn der Proband die Kniestellung in leichter Hyperextension sichert. Das Sprunggelenk reagiert bereits vor dem SO mit einem Anstieg der Dorsalextension. Diese erreicht erst nach dem SO ihr Maximum und geht von hier aus in Plantarflexion. Sprung- und Hüftgelenk reagieren als Erstes in der kinematischen Kette (Abb. 3).
Das Drehmoment verändert sich bereits vor dem SO und erreicht im Hüftgelenk zum SO das Maximum. Im Knie- und Hüftgelenk wird das maximale Drehmoment kurz nach dem SO erreicht (Abb.3). Für das maximale Kniedrehmoment beim Aufstehen aus dem Sitzen ergibt sich über die gesamte Referenzgruppe ein Mittelwert von 1,07 Nm/kg ± 0,12 Nm/kg.
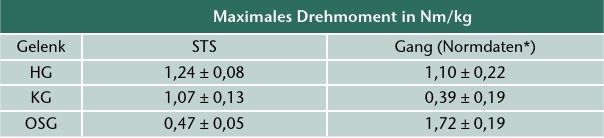
Verglichen mit dem Drehmoment beim ebenen Gehen ist zu erkennen, dass das Kniegelenk besonders gefordert ist (Tab. 1). Dies begründet die Entscheidung, hier mit einer aktiven Orthese zu unterstützen.
Aktive Orthese
Auf der Grundlage dieser Referenzdaten wurden die Anforderungen an den Antrieb ermittelt und dieser dementsprechend ausgelegt. Hauptkomponente ist ein DC-Motor (Faulhaber, Schönaich, Deutschland). Über ein untersetzendes Getriebe und eine Feder wird das Motormoment in die Orthesengelenke eingekoppelt. Durch die Feder als elastische Komponente des Antriebs werden Reibung und Trägheit des Motors vom Nutzer entkoppelt, und das Antriebsmoment lässt sich unabhängig von der Bewegung des Nutzers regeln 11. Dadurch wird erreicht, dass die Orthese in Situationen ohne Unterstützung dem Nutzer praktisch keinen Widerstand entgegenstellt.
Für zwei Probanden wurden KAF-Orthesen mit Karbonrahmen in Hart-/Weichguss-Technik gefertigt. Um das zusätzliche Gewicht durch den Antrieb zu kompensieren und eine gute Einkoppelung der externen Kräfte zu erreichen, ist es zwingend notwendig, mit Fußteil zu arbeiten. Als Fußfassung wurde eine Trekkingsandale in den Prototyp integriert. Die Sandale wurde bei der Fertigung auf dem Gipsmodell berücksichtigt, so dass eine plane, dünn ausgeführte Karbonsohle zwischen Sandale und der Laufsohle mit Sohlensensorik eingebaut ist. Über ein unilaterales frei laufendes Scharniergelenk ist das Fußteil mit der Orthese verbunden. Der Antrieb ist an den lateralen Schienen der Oberhülse montiert und wiegt ca. 1,4 kg (Abb. 4).
Durch das Gewicht und die lateralisierte Anbringung des Antriebs wurde der Schwerpunkt der unteren Extremität jeweils deutlich nach außen verlagert. Dies wird gerade beim Gehen als unnatürlich empfunden und führt zu einer vergrößerten Schrittweite.
Sensorik
Damit der Nutzer in gewünschter Weise unterstützt werden kann, sind Informationen zu den aktuellen Gelenkwinkeln und Drehmomenten notwendig. Unter Alltagsbedingungen ist das 3‑D-Bewegungsanalysesystem mit stationären Kraftmessplatten nicht zur Erfassung von Bodenreaktionskraft oder Gelenkwinkel verfügbar. Diese Größen sind jedoch für die Berechnung des Unterstützungsmomentes notwendig und müssen zur Bestimmung des Sollmoments auch im täglichen Einsatz zur Verfügung stehen. Gelenkwinkel werden über Winkelsensoren im Orthesenknie- und Sprunggelenk ermittelt. Zur Messung der Bodenreaktionskraft unter dem Fuß wurden miniaturisierte Kraftsensoren ausgewählt, die in der Fußplatte der Orthese integriert sind. Um eine Teilflexibilität der Sohle zu erhalten, ist die in sich steife Sensoreinheit geteilt und jeweils eine Einheit im Fersenbereich und eine zweite Einheit distal der Ballenlinie zwischen Sandale und Laufsohle eingebaut.
Im Vergleich zu hüftübergreifenden Systemen schränkt eine KAFO mit Unterstützung am Kniegelenk deutlich weniger ein. So entfällt jedoch die sensorische Winkelinformation durch das Hüftgelenk, um z. B. den Start der STS-Bewegung zu erkennen. Es konnte gezeigt werden, dass die Winkelsensorik in Kombination mit der Kraftmessung unter den Fußsohlen zur Berechnung des Unterstützungsmoments in den getesteten Situationen ausreichend ist.
Berechnung des Unterstützungsmomentes
Die aktive Unterstützung erfolgt analog der Servolenkung im Auto. Mit einem biomechanischen Modell, erstellt in der Arbeitsgruppe Regelungstechnik, wird aus den sensorisch erfassten Winkel- und Kraftdaten zeitgenau das vom Nutzer aufgebrachte Kniemoment berechnet. Multipliziert mit einem Verstärkungsfaktor ergibt sich das durch die Antriebe zugeschaltete Unterstützungsmoment. Als Verstärkungsfaktor wurden zunächst 30 % festgelegt, angelehnt an den in der Literatur beschriebenen Kraftverlust von ca. 30 % im Zuge des Alterungsprozesses 12.
Alternative Gelenkkinematiken
Werden externe Kräfte in den menschlichen Bewegungsapparat eingekoppelt, ist es wichtig, die anatomischen Strukturen zu schützen. Die Dreh-Gleit-Bewegung des Kniegelenks wurde bereits 1836 von Weber beschrieben 13. Diese kombinierte Bewegung führt zu einer wandernden momentanen Kniedrehachse während der Flexion bzw. Extension. Sobald ein Drehmoment von außen in die Gelenkstruktur eingebracht wird, ist die Kongruenz der anatomischen und der orthetischen Achse besonders wichtig. Nur so können Scherkräfte vermieden werden, um einer Schädigung der anatomischen Struktur vorzubeugen. Ein einfaches Scharniergelenk reicht daher für die Anwendung in einer aktiven Orthese nicht aus.
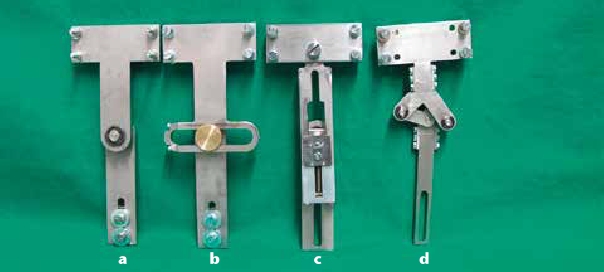
Vor der Konstruktion alternativer Gelenke wurde die Relativbewegung von nicht verbundenen Orthesenschalen am Probanden mittels 3‑D-Bewegungsanalyse aufgezeichnet. Der Verlauf der momentanen Drehachse in Bezug zur Kompromissdrehachse nach Nietert 14 wurde so unter Berücksichtigung der weichteiligen Bewegung bestimmt. Auf Basis dieser Daten wurden innerhalb der Arbeitsgruppe Aktorik drei alternative Kniekinematiken abgeleitet und aufgebaut (Abb. 5).
Das Gelenk mit Gleitführung (b) besteht aus einem einfachen Scharniergelenk, das in einem Langloch in 90° zur Oberschenkellängsachse auf dem proximalen Gelenkanteil läuft. Für die Federschlittenkonstruktion © verläuft ein Scharniergelenk in einem Langloch parallel zur Oberschenkellängsachse. Damit Ober- und Unterhülse nicht durch ihr Eigengewicht aufeinander zurutschen, kompensiert eine Feder im distalen Anteil das Eigengewicht und erlaubt bei auftretenden Scherkräften eine Verschiebung der Drehachse. Die Vierergelenkkette (d) bildet über die Relation der einzelnen Schenkellängen den Verlauf einer momentanen Kniedrehachse nach (Abb. 6).
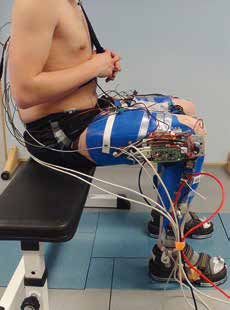
Um die Kongruenz dieser Gelenke zur anatomischen Momentandrehachse zu beurteilen, wird ähnlich der Arbeit von Wetz und Jacob 2001 15 der jeweils proximale Gelenkanteil sowohl medial als auch lateral über eine Sensorikeinheit mit der Orthesenhülse verbunden. Der Sensor erfasst Kräfte, die axial des Oberschenkelsegmentes wirken. So lässt sich im Probandentest (Abb. 7) auf Inkongruenzen zwischen der Orthesenkinematik und dem anatomischen Gelenk zurückschließen.
Gleichzeitig zur messtechnischen Erfassung wird der Proband nach seinem subjektiven Empfinden befragt. Hier sollte er beurteilen, wie gut das Orthesengelenk seiner Bewegung folgt und ob in bestimmten Winkeldurchläufen ein erhöhter Widerstand zu verspüren ist.
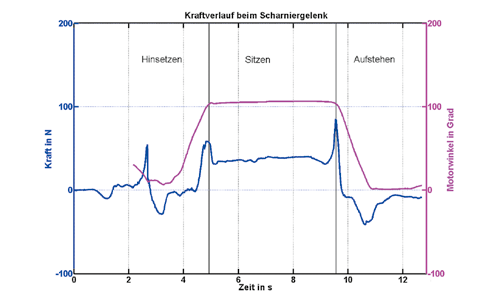
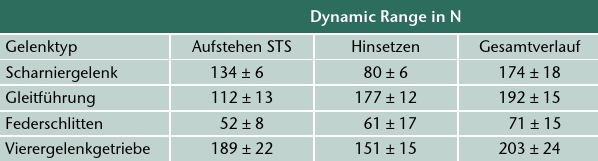
Zur Auswertung der Scherkraftmessung wird der Dynamikumfang (DR), also der Abstand zwischen Minimum und Maximum, der Kraftmessung bei den STS-Bewegungen betrachtet (siehe Abb. 7). Am Kraftverlauf sind die einzelnen Bewegungsphasen zu erkennen. Die gemittelten Kräfte aus dem Test betragen beim Hinsetzen maximal 177 N ± 12 N und minimal 61 N ± 17 N (Tab. 2). Die geringsten Scherkräfte ergeben sich mit der Federschlittenkonstruktion mit 52 N ± 8 N beim Aufstehen und 61 N ± 17 N beim Hinsetzen. Aufgrund der verringerten Scherkraft lässt sich auf eine verringerte Relativbewegung zwischen orthetischer und anatomischer Achse bei dieser Gelenkkonstruktion schließen.
Die ermittelten Scherkräfte zur Beurteilung der Orthesengelenke zeigen eine gute Übereinstimmung mit der subjektiven Rückmeldung des Testprobanden.
Mit einer Vierergelenkkette lässt sich der Verlauf einer momentanen Drehachse präzise wiedergeben. Es kommt dennoch zu unangenehmen Scherkräften, sobald diese Gelenke nicht exakt zueinander positioniert sind. Der Federschlitten kann diese in der Praxis nicht vermeidbare Ungenauigkeit sehr gut kompensieren und ermöglicht zudem, dass sich die Momentandrehachse der Orthesengelenke zur anatomischen Achse ausrichten kann.
Grundvoraussetzung für eine möglichst reduzierte Relativbewegung zwischen Orthese und Bein ist die Passform der Hülsen sowie die Positionierung der Kompromissdrehachse nach Nietert, da diese auch als Bezugspunkt der neu konstruierten Federschlittenkinematik dient.
Über eine funktionelle Methode 16 ließe sich mathematisch gegebenenfalls eine noch genauere Referenzachse bestimmen. Diese errechnete Referenz anstatt der Kompromissdrehachse nach Nietert für die Orthesenfertigung auf das Gipspositiv zu übertragen ist in der praktischen Umsetzung jedoch mangels Bezugspunkten nur schwer möglich. Daher bewährt es sich für die Praxis, die Kompromissdrehachse nach Nietert als Bezugspunkt beizubehalten.
Dass die Federschlittenkonstruktion die besten Ergebnisse hinsichtlich der Kongruenz liefert, lässt sich mit der Kombination aus vorgegebenem Verlauf und zugelassenem Spielraum erklären.
Messung der Muskelaktivität zur Beurteilung des Funktionsprinzips
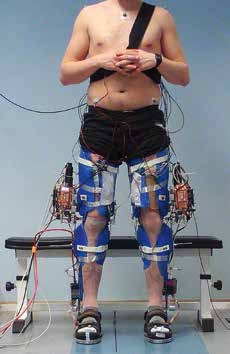
Um den Unterstützungseffekt der aktiven Orthese auf den Nutzer zu beurteilen, wird die Muskelaktivität des M. rectus femoris während des Prototypentests mit Probanden aufgezeichnet (EMG-System, Biovision, Wehrheim, Deutschland) (Abb. 8). Es wird angenommen, dass die Unterstützung durch die Orthese eine Reduzierung der maximalen Muskelaktivität zur Folge hat.
Zeitsynchron werden Drehmoment, Strom und Motorwinkel des Antriebs aufgezeichnet. So lassen sich die Daten der Bewegungsanalyse und der Muskelaktivität in Bezug zu den Motordaten begutachten. Die Probanden standen jeweils zehn Mal mit Unterstützung des Motors und mit zu null geregeltem Drehmoment auf. Die maximale Muskelaktivität im gefilterten und rektifizierten EMG-Signal wird im Zeitfenster um den SO betrachtet und zwischen der unterstützten und der 0‑Moment-Kondition verglichen.
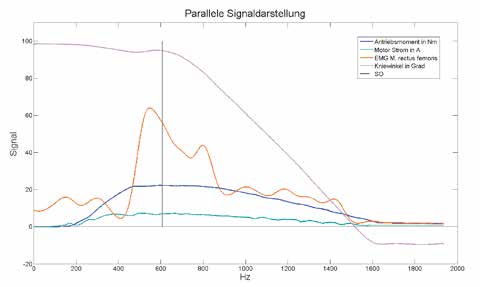
Es ergibt sich im Mittel eine um 26 % geringere maximale Muskelaktivität in der unterstützten Kondition, verglichen mit der 0‑Moment-Kondition. Der zeitliche Signalverlauf zeigt, dass die Aktivierung des M. rectus femoris deutlich vor dem SO erfolgt.
Die parallele Signaldarstellung zeigt einen Anstieg der Muskelaktivität (rot) kurz vor dem SO. Die Unterstützung durch das Antriebsmoment (blau) erfolgt zeitgerecht mit dem EMG, wobei das Antriebsmoment das Maximum bereits etwas früher erreicht. Dieses wird bis zu einem Kniewinkel (pink) von ca. 75° gehalten (Abb. 9).
Die Auswertung der Muskelaktivität zeigt, dass es mit aktiver Unterstützung durch die Orthese zu einer Reduzierung des Maximums im Bereich des SO kommt.
Fazit
Für das maximale Kniedrehmoment beim Aufstehen aus dem Sitzen ergibt sich über die gesamte Referenzgruppe ein Mittelwert von 1,07 Nm/kg± 0,12 Nm/kg. Die aufgebaute Aktorik erreicht das nötige Drehmoment von 30 % des Referenzmomentes. Die Entscheidung für eine Unterstützung des Kniegelenks bestätigt sich in den Gelenkmomenten der Probandenmessung.
Es konnte gezeigt werden, dass die Federschlittenkonstruktion eine gute Kongruenz zur anatomischen Kniedrehachse liefert, auch bei einer Unterstützung von außen durch den Motor.
Über Winkel- und Fußsohlensensorik konnte die Bestimmung des Unterstützungsmomentes beim STS zuverlässig erfolgen. Der relativ große Bauraum der Sohlensensorik erschwert jedoch das Gehen auf Treppen.
In Situationen, in denen Nutzer kein zusätzliches Moment benötigen, zeigte das Konzept aus SEA mit entsprechender Regelung, dass ein transparentes Mitlaufen der Orthese mit 0‑Moment möglich ist. Die Rückmeldung der Probanden beim Gehen in der Ebene bestätigt dies. Die Entscheidung, das eigene Kniedrehmoment nach dem Servoprinzip zu verstärken, bringt den Vorteil, dass der Nutzer die Funktionsweise des Systems als intuitiv empfindet.
Ausblick
Um die Reaktion des Nutzers auf die Steuerung der Orthese genauer zu beurteilen, werden für die weiteren Versuche auch Flex- und Extensoren des Sprunggelenks betrachtet. Hier könnte eine vermehrte Stabilisierung als Reaktion auf die externe Unterstützung stattfinden. Tests mit weiteren Probanden und auch älteren Menschen müssen zeigen, ob die beobachteten Effekte hier wieder zu finden sind.
Darüber hinaus müssen auch andere Alltagssituationen erprobt werden. Zielten die bisherigen Untersuchungen maßgeblich auf die Unterstützung bei konzentrischen Abläufen wie dem STS oder dem Treppensteigen, so ist auch das Treppabgehen als exzentrische Bewegung entgegen der Wirkrichtung des Antriebs eine Situation, in der der Nutzer von der aktiven Orthese profitieren kann (Abb. 10). Ein verändertes Antriebskonzept soll den lateral angebrachten Motor ersetzen. Mittels verteilter Aktorik kann der nächste Prototyp schlanker werden. So würde auch die ungünstige Gewichtsverteilung reduziert.
Das vorgestellte Gemeinschaftsprojekt wird durch die Deutsche Forschungsgemeinschaft gefördert.
Für die Autoren:
Dipl.-Ing. (FH) Julia Block
PhD Stefan van Drongelen
Abteilung Bewegungsanalytik
Universitätsklinikum Heidelberg, Klinik für Orthopädie und Unfallchirurgie
Schlierbacher Landstraße 200a
69118 Heidelberg
julia.block@med.uni-heidelberg.de
Dipl.-Ing. (FH) Roman Müller
Technische Universität Darmstadt
Institut für Elektromechanische Konstruktionen
Merckstraße 25
64283 Darmstadt
Begutachteter Beitrag/Reviewed paper
Block J, van Drongelen S, Müller R. Entwicklung einer aktiven Orthese mit Leistungsabgabe – Erhebung von Referenzdaten, Aufbau und Test des Prototyps am Probanden. Orthopädie Technik, 2014; 65 (5): 94–100



- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Samuel D, Rowe PJ. Effect of ageing on isometric strength through joint range at knee and hip joints in three age groups of older adults. Gerontology, 2009; 55 (6): 621–629
- DeVita P, Hortobagyi T. Age causes a redistribution of joint torques and powers during gait. J Appl Physiol, 2000; 88 (5): 1804–1811
- Yumin ET, et al. The effect of functional mobility and balance on health-related quality of life (HRQoL) among elderly people living at home and those living in nursing home. Arch Gerontol Geriatr, 2011; 52 (3): e180-e184
- Mortazavi SS, et al. Comparing the Effects of Group and Home-based Physical Activity on Mental Health in the Elderly. Int J Prev Med, 2013; 4 (11): 1282–1289
- Dollar AM, Herr H. Lower extremity exoskeletons and active orthoses: Challenges and state-of-the-art. IEEE Transactions on Robotics, 2008; 24 (1): 144–158
- Aguirre-Ollinger G, et al. A one-degree-of-freedom assistive exoskeleton with inertia compensation: the effects on the agility of leg swing motion. Proc Inst Mech Eng H, 2011; 225 (3): 228–245
- Fleischer C. Controlling Exoskeletons with EMG signals and a Biomechanical Body Model. Technische Universität Berlin: Berlin, 2007
- Kong K, Bae J, Tomizuka M. Control of Rotary Series Elastic Actuator for Ideal Force-Mode Actuation in Human-Robot Interaction Applications. IEEE/ASME Transactions on Mechatronics, 2009; 14 (1): 105–118
- Vicon, Plug In Gait Modelling Details. Oxford: Vicon Motion Systems Ltd., 2000
- Davis SÖ, Tyburski D, Gage JR. A gait analysis data collection and reduction technique. Human Movement Science, 1991; 10 (5): 7
- Grun M, Muller R, Konigorski U. Model based control of series elastic actuators. Biomedical Robotics and Biomechatronics (BioRob), 4th IEEE RAS & EMBS International Conference on 24–27 June 2012, 2012
- Samuel D, Rowe PJ. Effect of ageing on isometric strength through joint range at knee and hip joints in three age groups of older adults. Gerontology, 2009; 55 (6): 621–629
- Weber W, Weber E. Mechanik der menschlichen Gehwerkzeuge. Göttingen, 1836
- Nietert M. Untersuchungen zur Kinematik des menschlichen Kniegelenkes im Hinblick auf ihre Approximation in der Prothetik. Berlin: Technische Universität Berlin, 1975
- Wetz HH, Jacob HAC. Die Bedeutung des dreidimensionalen Bewegungsablaufs des Femurotibialgelenks für die Ausrichtung von Knieführungsorthesen. Der Orthopäde, 2001; 30 (4): 196–207
- Gamage SS Lasenby J. New least squares solutions for estimating the average centre of rotation and the axis of rotation. J Biomech, 2002; 35 (1): 87–93
