1 Institut für Biomechanik, Klinik Lindenplatz GmbH, Bad Sassendorf
2 Universität Paderborn, Department Sport & Gesundheit, Arbeitsbereich Psychologie und Bewegung
3 Universität Duisburg-Essen, Lehrstuhl für Mechanik und Robotik
Einleitung
Die orthopädische Rehabilitation nach endoprothetischem Hüft- und Kniegelenkersatz (Hüft- und Knie-TEP) ist wichtiger Bestandteil der modernen medizinischen Versorgung. In Deutschland wurden im Jahr 2021 233.537 Hüft-TEP- und 172.011 Knie-TEP-Operationen durchgeführt1.
Hauptgrund für eine Hüft- oder Knie-TEP ist die Degeneration der Gelenke z. B. aufgrund von Alter, Übergewicht, Fehlstellungen oder Verletzungen. Zu den wichtigsten Zielen nach Gelenkersatz gehören die Wiederherstellung der Mobilität, die Verbesserung der Gelenkbeweglichkeit, die Steigerung der Kraft, die Verringerung der Schmerzen2 3 4 sowie die Wiederherstellung des normalen Gangbildes5.
Postoperativ werden Verbesserungen gezeigt und das Gangbild scheint klinisch unauffällig. Studien zeigen jedoch selbst mehrere Jahre nach Hüft- und Knie-TEP noch erhebliche Defizite auf der operierten Seite.
Als Hauptdefizite nach Hüft-TEP werden atypische Gangzyklen, Kraftdefizite und dynamische Gelenksteifigkeit auf der operierten Seite [6], prä- und postoperative Unterschiede in der Kniekinematik6 sowie Atrophien der Muskeln der hüftumgebenden Muskulatur in den ersten zwei Jahren7 berichtet.
Nach Knie-TEP wurden eine reduzierte oder fehlende Flexions-Extensions-Bewegung8, eine verringerte maximale Kniebeugung während der Gewichtsübernahme9 sowie noch 6 Jahre postoperativ ein Missverhältnis der Extensoren- zur Flexorenkraft zu Ungunsten der Flexoren nachgewiesen10.
Zur Schmerzvermeidung haben Patienten präoperativ meist über mehrere Jahre hinweg individuelle Kompensationsstrategien entwickelt, die so stark automatisiert sind, dass sie auch nach der Operation noch Bestand haben. Die Folge sind ausgeprägte Seitenasymmetrien in den Gangparametern11 12, ein erhöhter Verschleiß der Endoprothese sowie Fehl- und Überbelastungen der bilateralen kinematischen Kette und der Wirbelsäule13 14. Daher sollte der Wiederherstellung eines physiologisch normalen Gangbildes eine zentrale Rolle in der Rehabilitation zukommen15 16. Derzeit findet in der Rehabilitation jedoch nur ein wöchentliches Gehtraining statt. Dies ist völlig unzureichend, um bestehende Automatismen aufbrechen und neue Bewegungsmuster generieren zu können. Diese Aufgabe kann nur mit einem gezielten und Feedback-basierten Gangtraining gelöst werden17 18.
Stand des Wissens und der Einsatz von IMU-Sensoren
Im Vordergrund jeder Konzeption eines Feedbacktrainings steht die Frage, was genau wie genau adressiert werden soll. Voraussetzung der Frage nach dem Was für den Einsatz eines Feedbacktrainings in der orthopädischen Rehabilitation zur Wiederherstellung eines normalen Gangbildes sind Detailkenntnisse über die Ursache-Wirkungs-Mechanismen defizitärer Gangbilder nach Gelenkersatz und insbesondere die Aufdeckung der hierfür wesentlichen Parameter. Eigene Studien zeigen, dass sich spatio-temporale Parameter wie Schrittlängen, Kadenzen oder Gangphasen im Seitenvergleich zwischen operierter und nicht operierter Seite nur um weniger als 2–3 % unterscheiden19 20 21. Bewegungsumfänge und ‑verläufe der betroffenen Gelenke hingegen zeigen Differenzen von 15–20 % und wurden daher als Schlüsselparameter definiert22 23 24. Hintergrund hierfür ist, dass der erfolgreiche Einsatz eines Feedback-Trainings zur Reduzierung von Asymmetrien merkliche Unterschiede für eine zielgerichtete und wahrnehmbare Adressierung voraussetzt.
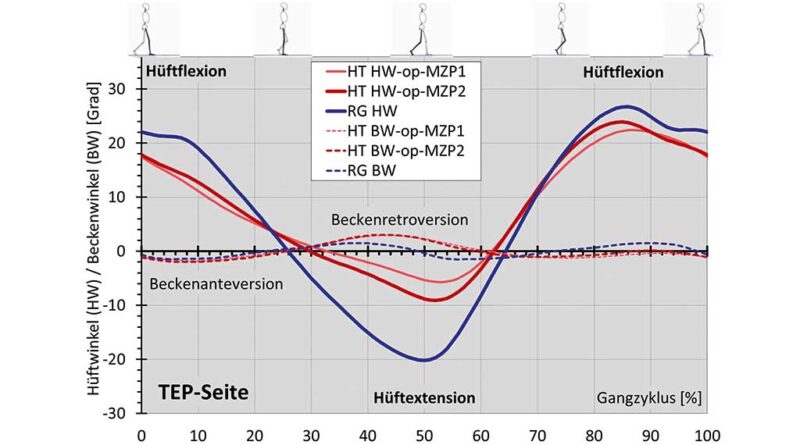
Die Frage nach dem Was eines Feedbacktrainings ist mit der Normalisierung von Bewegungsumfang und vor allem Bewegungsverlauf des betroffenen Gelenks definiert. Im Detail muss nach Hüft-TEP die gesamte Flexions-Extensions-Bewegung im Hüftgelenk adressiert werden (Abb. 1) 25 26 27.
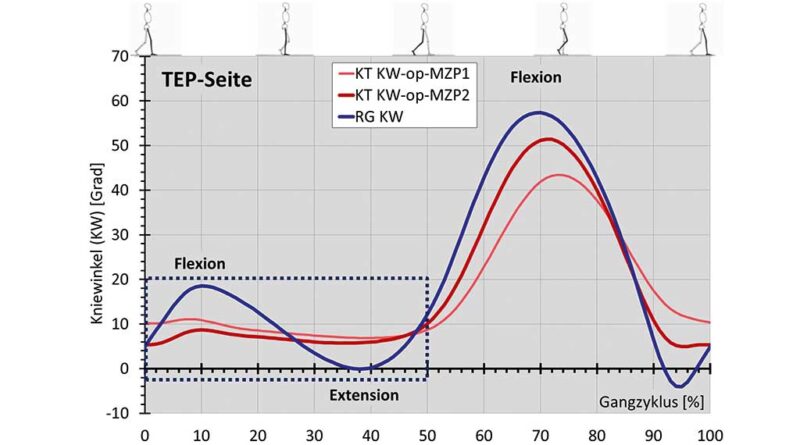
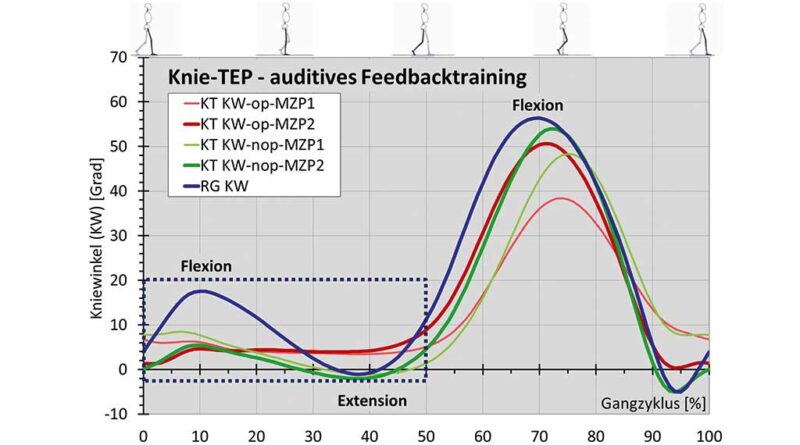
Nach Knie-TEP hingegen ist primär die defizitäre Flexions-Extensions-Bewegung im Kniegelenk in der vortriebswirksamen Standphase zu adressieren, während die unbelastete Vorschwungphase, die durch eine deutliche Kniebeugung gekennzeichnet ist, von untergeordneter Bedeutung ist (Abb. 2) 28 29.
Die Frage nach dem Wie eines Feedbacktrainings zur Wiederherstellung eines normalen Gangbildes erfordert eine Strategie, die sich am Was, d. h. an den Schlüsselparametern nach Hüft- und Knie-TEP, orientiert. Eine Möglichkeit hierzu besteht in einem auditiven Feedback, das bereits erfolgreich zum Training von Bewegungsverläufen beim Rudern eingesetzt wurde30. Durch Audifizierung, d. h. durch die Vertonung von Messdaten, kann eine Melodie der Bewegung erzeugt werden. Ein Vorteil der Audifizierung ist, dass der Mensch die beiden Modalitäten Hören und Bewegen parallel verarbeitet kann. Obwohl diese Methode nur selten getestet wurde, scheint sie vielversprechend zu sein. In der Parkinson-Therapie31 erwies sich beispielsweise die Vertonung von Kraftdaten, die über Einlagen erfasst wurden, als sehr effektiv. Als Besonderheit dieser Studie sollen erstmals die Bewegungsmelodien beider Körperseiten im Vergleich präsentiert werden. Die nicht operierte Seite dient dabei als individuelle Normvorgabe für die operierte Seite. Damit ist diese Methode tempounabhängig. Zur Realisierung ist eine Hardware zur Erfassung der Bewegungsdaten und eine Software zur Audifizierung erforderlich.
Auf Hardware-Seite können IMU-Sensoren bei der Realisierung eines auditiven Feedbacktrainings helfen. IMU-Sensoren haben sich u. a. in Anwendungen der Automobiltechnik (Fahrdynamikregelung), der Industrieautomation (Maschinenüberwachung) und der Medizintechnik (chirurgische Navigation und Prothetik) bewährt32. Im Leistungssport bei Laufanalysen werden IMU-Sensoren eingesetzt, um unterschiedliche Belastungen, Asymmetrien und Ermüdungserscheinungen anhand von Bewegungsänderungen abschätzen, qualitativ bewerten und Aussagen über die Laufsymmetrie und ‑ökonomie treffen zu können33. In der Neurologie wurden IMU-Sensoren bei Ganganalysen von Patienten mit hereditärer spastischer Paraplegie eingesetzt, um die Weg-Zeit-Parameter zu detektieren und den Zusammenhang zwischen der Gangeinschränkung und der Krankheitsschwere zu erfassen34.
Ziel der vorliegenden Studie war es daher, die Vertonung von Gelenkwinkeln mittels IMU-Sensoren als Methode zur Ansteuerung und Verbesserung von defizitären Bewegungsverläufen in der orthopädischen Rehabilitation zu testen. Es wurden drei Fragen behandelt:
- Kann ein auditives Feedback in der Rehabilitation nach Hüft- und Knie-TEP zur Wiederherstellung eines normalen Gangbildes eingesetzt werden?
- Sind Patienten in der Lage, ein auditives Feedback umzusetzen und zu verstehen?
- Sind IMU-Sensoren für die Vertonung von Gelenkwinkeln und den Einsatz in der orthopädischen Rehabilitation geeignet?
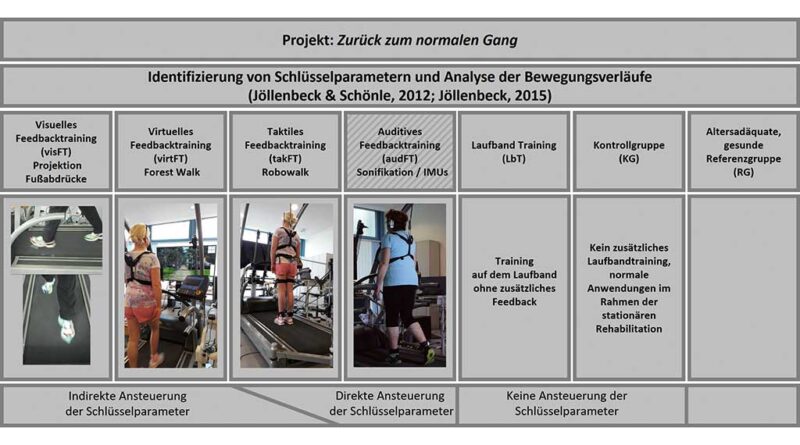
Die Studie ist eingebettet in das Gesamtprojekt „Zurück zum normalen Gang“, das sich mit der Entwicklung und Optimierung des Gangverhaltens von Patienten während der 3‑wöchigen Rehabilitation beschäftigt (Abb. 3 und Abb. 4).
Im Projekt wurden verschiedene Arten der Parametersteuerung getestet und miteinander verglichen (Abb. 3): die indirekte Steuerung, bei der eine Veränderung der Bewegungsverläufe indirekt über eine Anpassung der Schrittlänge angestrebt wird (visFT + virtFT), die unspezifische direkte Steuerung, bei der die Gelenkbewegung beim Gehen durch Zugkräfte unmittelbar beeinflusst wird (takFT), und die spezifische direkte Steuerung, bei der über eine Vertonung der Gelenkwinkel, die dem Patienten online präsentiert wird, eine direkte Beeinflussung des Bewegungsverlaufes angestrebt wird (audFT). Weitere Details zum Gesamtprojekt finden sich in Jöllenbeck/Pietschmann 201935.
Die Hypothese dieser Studie lautete, dass ein auditives Feedbacktraining (audFT), d. h. ein Training mit Bewegungsvertonung, am besten geeignet ist, eine Reduzierung von Asymmetrien nach Gelenkersatz und damit eine schnellere Normalisierung des individuellen Gangbildes zu ermöglichen.
Methoden
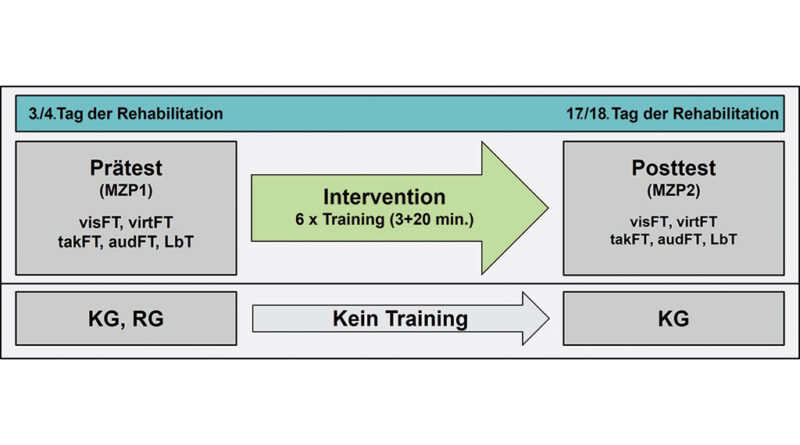
In das randomisiert-kontrollierte klinische Projekt mit einer Kontroll- und 5 Trainingsgruppen (Abb. 3) wurden je 120 Patienten nach Hüft- und Knie-TEP, die sich in der orthopädischen Rehabilitation nach Gelenkersatz befanden (Klinik Lindenplatz, Bad Sassendorf), aufgenommen. Einschlusskriterien waren: eine erste Hüft- oder Knie-TEP und die Fähigkeit, ohne Gehhilfen auf einem Laufband gehen zu können. Ausschlusskriterien waren: eine weitere ipsi- oder kontralaterale Hüft- oder Knie-TEP, eine frühere größere orthopädische Operation an den unteren Gliedmaßen, eine neurologische Erkrankung oder eine andere Erkrankung, die die Gehfähigkeit beeinträchtigt. An der Studie zum auditiven Feedback-Training nahmen 21 Patienten nach Hüft-TEP (12 ♀, 9 ♂; 55,1 ± 5,9 Jahre; 84,7 kg ± 18,7 kg; 173,9 ± 8,3 cm; BMI 27,9 ± 5,4) und 22 nach Knie-TEP (19 ♀, 3 ♂; 56,8 ± 5,7 Jahre; 94,2 kg ± 20,1 kg; 170,5 ± 8,1 cm; BMI 32,4 ± 6,8) teil. Zusätzlich wurde eine gesunde altersadäquate Referenzgruppe (RG) von 20 Probanden (10 ♀, 10 ♂; 55,9 ± 6,8 Jahre; 70 kg ± 11,5 kg; 173,0 ± 6,9 cm; BMI 23,3 ± 2,8) ohne orthopädische Einschränkungen erfasst. Die RG wurde nur zu einem Messzeitpunkt erhoben. Alle Patienten und Probanden waren zwischen 45 und 75 Jahre alt.
Alle Patienten wurden in einem 14-Tage-Intervall zu Beginn (Prätest, MZP1, Tag 3/4) und am Ende ihres Aufenthalts (Posttest, MZP2, Tag 17/18) gemessen. Beim Prätest wurden eine Patienten- und Probandenaufklärung sowie ein Anamnesebogen eingeholt. Ein positives Ethikvotum der Ärztekammer Westfalen-Lippe und der Universität Münster lag vor.
Beim Prä- und Posttest wurde eine Ganganalyse auf einem Laufband (h/p/cosmos quasar med 4.0, h/p cosmos sports & medical GmbH, Traunstein) mit integrierter Ganganalyse-Messtechnik (Zebris FDM, 120 Hz; Zebris medical GmbH, Isny) zur Erfassung kinetischer Parameter, Videoaufzeichnung (dorsal) und einem 3D-Ultraschall-Bewegungsanalysesystem (Zebris WinGait mit CMS-HS, 100 Hz) zur Aufzeichnung kinematischer Parameter durchgeführt.
Patienten und Probanden wurden gebeten, auf dem Laufband mit einer selbst gewählten Gehgeschwindigkeit zu gehen. Innerhalb der 6 Trainingseinheiten (Intervention) sollten die Patienten nach einer 3‑minütigen Eingewöhnungsphase ein Gangtempo wählen, das sie 20 Minuten lang beibehalten konnten. Das Display des Laufbandes war abgedeckt, um eine unabhängige und stufenlose Einstellung der Geschwindigkeit zu gewährleisten. Die Ergebnisse der Analysen wurden den Patienten und Probanden erst nach Abschluss aller Messungen mitgeteilt.
In diesem Beitrag liegt der Fokus auf dem auditiven Feedbacktraining (audFT) und dem Einsatz von IMU-Sensoren, was in der Folge näher beschrieben wird. Zur Auswertung und Einschätzung der Ergebnisse werden die anderen IGs und die KG mit betrachtet.
IMU-Sensorsystem
Die Echtzeit-Sonifikation der Gelenkbewegungen, d. h. die Vertonung der Hüft- oder Kniewinkel, wurde mit Hilfe von drahtlosen inertialen Messeinheiten m400 (menios GmbH, Ratingen, Abb. 6) und der objektorientierten Mehrkörper‑C++-Bibliothek MobileBody (ITBB GmbH, Neukirchen-Vluyn) durchgeführt.
Training mit auditivem Feedback (audFT)/Sonifikation
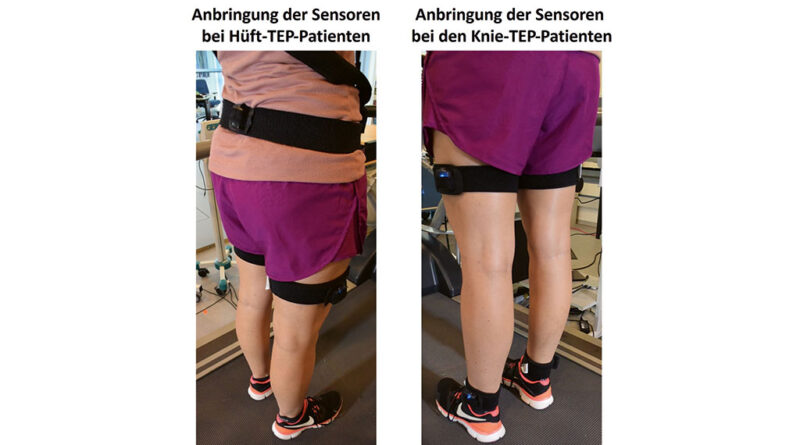
Während des auditiven Feedbacks wurden die Hüft- bzw. die Kniegelenkwinkel an beiden Beinen mit Inertialsensoren gemessen. Bei Hüft-TEP wurden drei Sensoren zur Messung der Hüftwinkel in der Sagittalebene verwendet: ein Sensor an jedem Oberschenkel und ein Sensor am Kreuzbein. Bei Knie-TEP wurden vier Sensoren zur Messung der Kniewinkel in der Sagittalebene verwendet: je ein Sensor an jedem Oberschenkel und an jedem Unterschenkel (Knöchel) (Abb. 5). Jeder Sensor (3,5 cm x 4,4 cm x 1,3 cm, akkubetrieben) wiegt 17 g und kann mit einer passenden Kletttasche auf einem elastischen Neopren-Klettband befestigt werden (Abb. 5 und Abb. 6).
Jeder gemessene Gelenkwinkel wurde in Echtzeit auf die Frequenz eines reinen Tons abgebildet (Sonifikation, siehe Abb. 7), so dass jeder Winkelverlauf als Bewegungsmelodie über Kopfhörer auf das ipsilaterale Ohr des Patienten gespielt werden konnte. Bei Hüft-TEP wurden die Gelenkwinkel während des gesamten Gangzyklus sonifiziert. Bei Knie-TEP wurden die Gelenkwinkel ausschließlich im Bereich von ± 15 Grad vertont mit dem Ziel, den Winkelverlauf lediglich in der vortriebswirksamen Standphase als Ton wiederzugeben. Das Feedback während des 20-minütigen Trainings war nach einem einfachen Fading-Prinzip konzipiert: zunächst 6 Minuten mit, dann 4 Minuten ohne Feedback und nach einer kurzen Pause zur Rekalibrierung der Sensoren nochmals 4 Minuten mit, dann 6 Minuten ohne Feedback. Die Aufgabe bestand darin, die Melodie der operierten (op) Seite an die der nicht operierten (nop) Seite anzupassen und die Bewegungsabläufe auch in den Perioden ohne Feedback beizubehalten.
Software zur Vertonung des auditiven Feedbacks
Jeder IMU-Sensor wurde mit einer Abtastrate von 200 Hz und einer konstanten Latenzzeit von 16 ms betrieben. Die Sensorsignale wurden von der Software in drei Schritten online verarbeitet: (1) Reduktion des Driftfehlers, (2) Berechnung der Verdrehung der Sensoren relativ zueinander und (3) Erzeugung eines Reintones als Funktion der sagittalen Komponente der berechneten Verdrehung.
Die Berechnungen erfolgten mit Hilfe von MobileBody und die Erzeugung des Reintones erfolgte mit der Open-Source C++ Bibliothek openAL, die in MobileBody integriert ist. Bei Hüft-TEP wurden Hüftwinkel im Bereich von ± 45° vertont, um die gesamte Gelenkbewegung abzubilden. Bei Knie-TEP wurden Kniewinkel im Bereich von ± 15° vorgegeben, um die Gelenkbewegung ausschließlich in der Standphase abzubilden (Abb. 7). In beiden Fällen wurde der Nullwinkel auf 440 Hz (Kammerton A) eingestellt, bei zunehmender Beugung stieg der Ton an und vice versa. Winkel außerhalb der Grenzen wurden sanft stummgeschaltet. Weitere Details sowie die Berechnungsgrundlage der Vertonung finden sich in36.
Statistik
Die statistischen Analysen wurden mit IBM SPSS Statistics Version 24 durchgeführt. Das Signifikanzniveau wurde auf p <0,05 festgelegt. Eine Normalitätsprüfung wurde mit dem Kolmogorov-Smirnov-Test durchgeführt. Es wurde eine einfaktorielle ANOVA mit Messwiederholung (TEST × GRUPPE) verwendet. Das partielle Eta-Quadrat (η) wurde zur Berechnung der entsprechenden Effektgrößen verwendet. Die resultierenden p‑Werte wurden nach Bonferroni korrigiert.
Ergebnisse
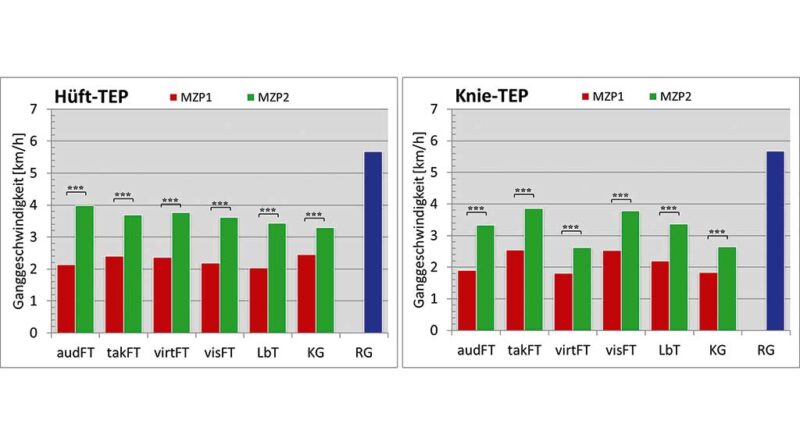
Basierend auf gepaarten t‑Tests gab es statistisch signifikante Verbesserungen in allen wesentlichen Gangparametern wie Ganggeschwindigkeit (Abb. 8), Schrittlänge, Standphase etc. (p < .001) zwischen Prä- und Posttest in allen Interventionsgruppen (visFT, virtFT, takFT, LbT, audFT) und in der KG. Beim Posttest bleiben alle Parameter im Vergleich zur RG defizitär37.
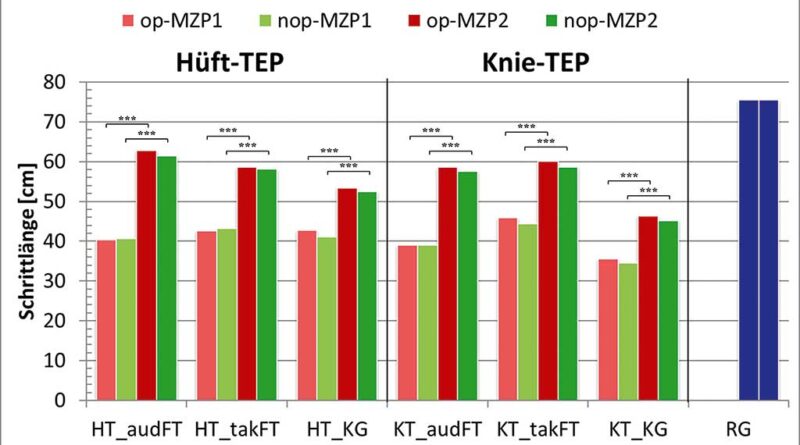
Die ANOVA zeigte eine statistisch signifikante Interaktion zwischen TEST und GRUPPE für die Geschwindigkeit (F(11,228) = 1.98, p = .031, partielles ɳ² = .087), jedoch gab es keine statistisch signifikante Interaktion zwischen TEST und GRUPPE für die Schrittlänge (op-Seite) (F(11,228) = 1. 79, p = .055, partielles ɳ² = .080); Schrittlänge (nop-Seite) (F(11,228) = 1.39, p = .178, partielles ɳ² = .063), Standphase (op-Seite) (F(11,228) = 1. 19, p = .291, partielles ɳ² = .055) und Standphase (nop-Seite) (F(11,228) = 1.31, p = .219, partielles ɳ² = .060) (Abb. 9).
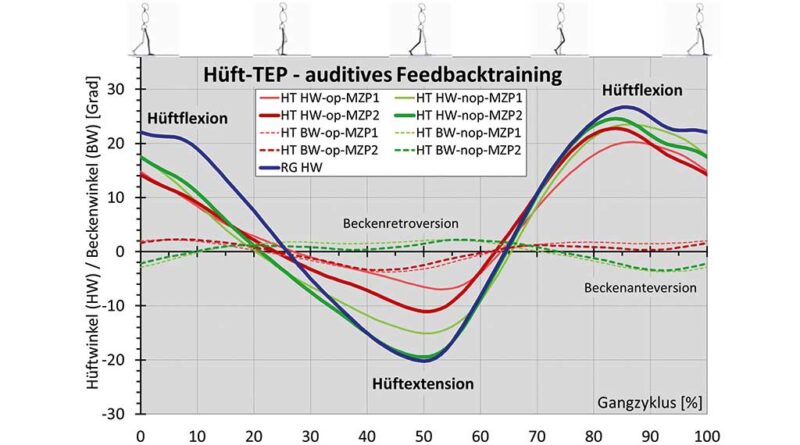
Die Ergebnisse der 3D-Analyse zeigen einen verbesserten Bewegungsumfang im operierten Gelenk vom Prä- zum Posttest in allen Interventionsgruppen. Am Ende der 3‑wöchigen Rehabilitation gab es jedoch immer noch signifikante Unterschiede im Bewegungsverlauf wie im Bewegungsumfang nach Hüft-TEP (Abb. 10) und Knie-TEP (Abb. 11) gegenüber der RG. Ebenfalls weisen alle Gruppen noch signifikante Unterschiede im Bewegungsverlauf zwischen op- und nop-Seite im Vergleich zu RG auf (Abb. 10 und Abb. 11, exemplarische Darstellung des audFT).
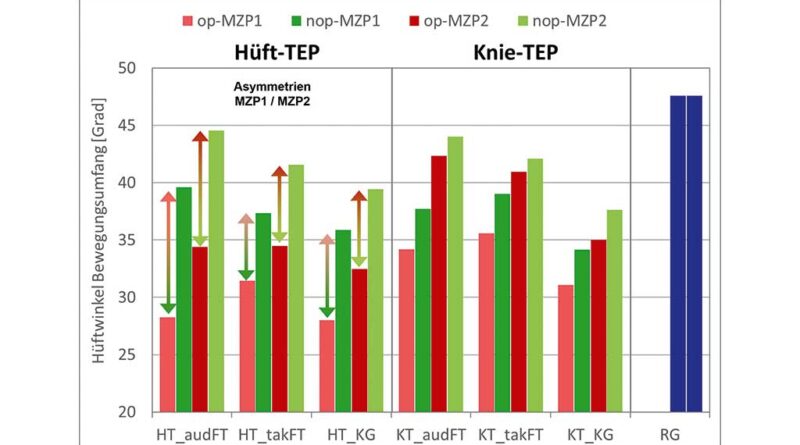
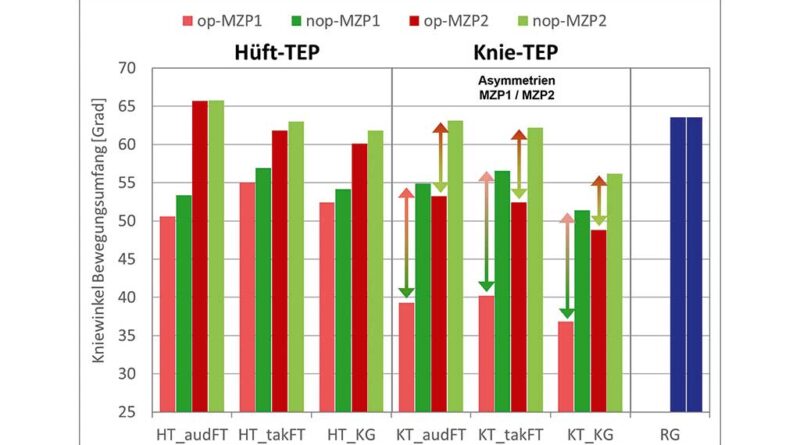
Mit direkter Ansteuerung der Schlüsselparameter nach Hüft-TEP verbessert sich die Flexions-Extensions-Bewegung im Hüftgelenk mit takFT und audFT, es verbleiben jedoch Defizite und Asymmetrien (Abb. 12) zwischen der op- und nop-Seite sowie beidseits im Vergleich zur RG. Auch nach Knie-TEP sind die Flexions-Extensions-Bewegungen mit takFT und audFT in der Fußaufsatz- und mittleren Standphase nur gering verbessert, Defizite sowie Asymmetrien (Abb. 13) zwischen op- und nop-Seite bleiben bestehen, ebenso wie beidseits im Vergleich zur RG.
Weiter zeigen sich Defizite nicht nur im operierten Gelenk, sondern auch in benachbarten Gelenken. So folgt nach Knie-TEP auch ein reduzierter Bewegungsumfang im Hüftgelenk ebenso wie nach Hüft-TEP Bewegungseinschränkungen auch im Kniegelenk (Abb. 12 und Abb. 13).
Nach Hüft-TEP zeigt das audFT im Vergleich aller IGs zumindest vom Betrag her die größten Verbesserungen in Geschwindigkeit, Kadenz, Schrittlänge und Standphase, ebenso wie die größten Zunahmen des Bewegungsumfangs in Hüft- und Kniegelenken (Abb. 10) und im Gegensatz zu allen anderen IGs auch keine weitere Zunahme des Beckenwinkels.
Nach Knie-TEP zeigen im Vergleich aller IGs das audFT und das takFT die größten Verbesserungen bei Geschwindigkeit, Kadenz und Schrittlänge (nur audFT) ebenso wie auch die größten Zunahmen des Bewegungsumfangs im Kniegelenk (Abb. 11).
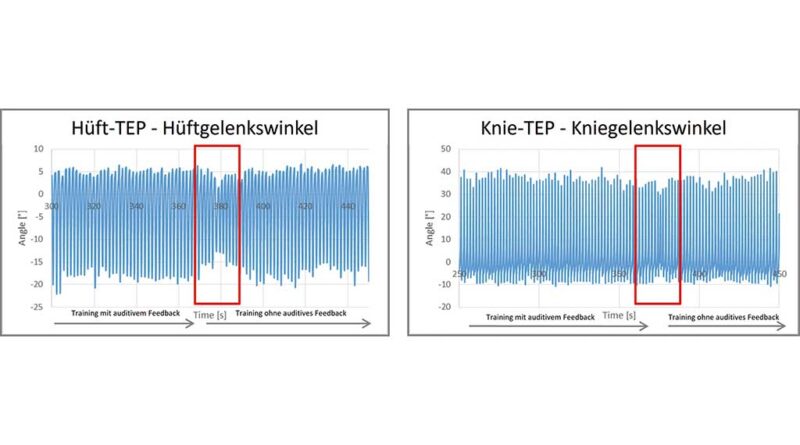
Ein weiteres Ergebnis war die Beobachtung des auf dem Kontrollmonitor sichtbaren schnellen Rückfalls in frühere Bewegungsmuster bei fehlendem auditivem Feedback (Abb. 14). Während in der ersten Phase mit Feedback das Angleichen der op- an die nop-Seite deutlich zu erkennen war, kehrte die Bewegung in der Phase ohne Feedback, d. h. nach Abschalten der Vertonung, schnell wieder in ihren ursprünglichen Verlauf zurück.
Diskussion
In dieser Studie wurde eine spezifische direkte Ansteuerung von Schlüsselparametern nach Gelenkersatz über die Vertonung von Gelenkwinkeln (audFT) mit IMUs getestet und mit einer unspezifischen direkten Ansteuerung über taktiles Feedback (takFT) und einer indirekten Steuerung mittels visuellem Feedback (visFT), virtuellem Feedback (virtFT) und Laufbandtraining (LbT) verglichen.
Die Ergebnisse aller Interventionsgruppen decken sich weitgehend mit denen der Kontrollgruppen. Die Verbesserungen sind im Wesentlichen auf den normalen Heilungsprozess während der Rehabilitation mit Verbesserungen der Gelenkbeweglichkeit und zunehmender Gangsicherheit bei gleichzeitiger Schmerzreduktion zurückzuführen38 39 40 41 42.
Die Ergebnisse von takFT und audFT stimmen weitgehend mit denen der anderen IGs und KG überein und bieten auf den ersten Blick keine neuen Erkenntnisse. Ohne nachweisbare Interaktionseffekte scheint eine unspezifische direkte Ansteuerung (takFT) oder eine spezifische direkte Ansteuerung (audFT) der Schlüsselparameter nur vom Betrag her erfolgreicher zu sein. Deutliche Unterschiede zwischen op- und nop-Seite (Symmetrieindex >14 %) ließen größere Effekte erhoffen. Im Gegensatz zu takFT haben die Patienten beim audFT erstmals eine direkte Kontrolle der Schlüsselparameter bei jedem Schritt erhalten. Dies könnte der Grund dafür sein, dass die Ergebnisse von audFT zumindest vom Betrag her etwas besser ausfallen, dies muss aber mangels statistisch belastbarer Ergebnisse zum jetzigen Zeitpunkt spekulativ bleiben.
Dass ein audFT bei Sportbewegungen wirksam ist, wurde bereits nachgewiesen43. Die Ergebnisse der vorliegenden Studie geben Anlass zu vorsichtigem Optimismus, dass eine Wirksamkeit auch beim menschlichen Gang möglich ist. Die für die Patienten nicht sichtbare Onlinekontrolle des Bewegungsablaufs zeigt, dass Patienten sehr wohl in der Lage sind, ihren Bewegungsablauf durch ein geeignetes Feedback bewusst und kontrollierbar zu verändern. Ohne Feedback fallen sie jedoch sehr schnell in ihr vorheriges hochautomatisiertes und entsprechend stabiles Bewegungsmuster zurück. Dieses zeigt eindrucksvoll, wie wichtig ein regelmäßiges Gangtraining ist, das mindestens mehrmals täglich und weit über die Rehabilitationszeit hinaus durchgeführt werden sollte, um das Gangbild dauerhaft und nachhaltig zu kontrollieren und kontinuierlich zu verbessern.
Limitationen/Einschränkungen
Ein wesentliches Problem dieser Studie sind Häufigkeit, Dauer und Gesamtzeitraum von Feedback und Training. Insgesamt 6 Trainingseinheiten zu je 20 Minuten über einen Zeitraum von lediglich 2 Wochen reichen bei weitem nicht aus, um eine hochautomatisierte, aber defizitäre Bewegung aufzubrechen und durch eine optimierte Bewegung zu ersetzen. Dies erklärt auch, warum die üblichen therapeutischen Gangschulungen keine nachhaltige Wirkung erzielen können.
Vor- und Nachteile von IMU-Sensoren
Der Einsatz von IMU-Sensoren hat die Realisierung einer Bewegungsvertonung/Sonifikation bzw. das auditive Feedbacktraining überhaupt erst ermöglicht. In Vorstudien getestete kabelgebundene Systeme zur Bewegungsvertonung haben sich als störanfällig und nicht praktikabel im Umgang mit Patienten erwiesen. Das geringe Gewicht der menios-Sensoren wie auch die leichte und schnelle Applikation am Patienten erwiesen sich als äußerst praktikabel. Die Möglichkeit, auch unabhängig vom Laufband Messungen im Raum durchführen und somit alltägliche Situationen (Treppensteigen, Ein- und Aussteigen in ein Auto etc.) abbilden zu können, spricht für einen Einsatz von IMU-Sensoren in der orthopädischen Rehabilitation.
Nachteilig hingegen ist die systemimmanente Drift der IMU-Sensoren, die in dieser Studie das Design maßgeblich beeinflusst und zur reduzierten Trainingszeit sowie dem Fading-Prinzip mit Rekalibrierung geführt hat. Auch die zur Kalibrierung der Sensoren erforderliche Einnahme einer Neutral-Null-Stellung ist nach Hüft- und Knie-TEP kaum oder nur eingeschränkt möglich und erschwert den Einsatz von IMU-Sensoren.
Fazit
Zusammenfassend zeigen alle Trainingsmethoden am Ende einer 3‑wöchigen Rehabilitation nach Hüft- und Knie-TEP Verbesserungen der wesentlichen Gangparameter. Allerdings verbleiben deutliche Asymmetrien bei wesentlichen Parametern zwischen op- und nop-Seite sowie im Vergleich zur RG. Die Wiederherstellung eines gleichmäßigen und sicheren Ganges am Ende der Rehabilitation ist noch lange nicht erreicht. Als Konsequenz besteht weit über die Rehabilitation hinaus ein dringender Handlungsbedarf, um das Gangbild zu normalisieren und langfristige Folgeschäden am Bewegungsapparat zu vermeiden.
Das auditive Feedbacktraining zeigte statistisch zwar keinen Vorteil gegenüber anderen Feedback-Methoden. Allerdings zeigen die Ergebnisse und Beobachtungen, dass die Vertonung der Gelenkwinkel von den Patienten sehr gut angenommen wird und dass sie das Gangbild zumindest während des Trainings mit Feedback signifikant verändern können.
Der Einsatz von IMU-Sensoren hat eine praktikable Sonifikation von Gelenkwinkeln in der orthopädischen Rehabilitation überhaupt erst möglich gemacht. Jedoch ist eine Weiterentwicklung der IMU-Sensor-Technologie dringend erforderlich, damit neben einer optimierten Kalibration auch ein mobiles Feedback über längere Zeiträume, d. h. im Alltag auch über die Rehabilitation hinaus, möglich wird, um ein hoch automatisiertes defizitäres wieder in ein normales symmetrisches Gangbild überführen zu können.
Für die Autoren:
Dr. Juliane Pietschmann
Institut für Biomechanik
Klinik Lindenplatz GmbH
Weslarner Straße 29
59505 Bad Sassendorf
Tel.: 02921 501 3682
juliane.pietschmann@kliniklindenplatz.de
Begutachteter Beitrag/reviewed paper
Pietschmann J et al. Einsatz von IMU-Sensoren in der orthopädischen Rehabilitation nach Hüft- und Kniegelenksersatz zur Wiederherstellung eines normalen Gangbildes, Orthopädie Technik, 2023; 74 (12): 46–55


- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Statistisches Bundesamt. Die 20 häufigsten Operationen insgesamt (Stand 22.09.2022). Vollstationär behandelte Patientinnen und Patienten in Krankenhäusern 2021. https://www.destatis.de/DE/Themen/Gesellschaft-Umwelt/Gesundheit/Krankenhaeuser/Tabellen/drg-operationen-insgesamt.html (Zugriff am 15.08.2023)
- Schönle C (Hrsg.). Rehabilitation: Praxiswissen Halte- und Bewegungsorgane. Stuttgart: Thieme, 2004
- Bochdansky T, Laube W, Böckelberger M. Muskuläre Funktionsdefizite nach Hüft- und Knietotalendoprothese. Journal für Mineralstoffwechsel & Muskuloskelettale Erkrankungen, 2008; 15 (Sonderheft 1): 48–52
- Jöllenbeck T, Schönle C. Gangverhalten von Patienten nach Knie-TEP während der Rehabilitation. Orthopädie & Rheuma, 2012; 15: 37–41. doi: 10.1007/s15002-012‑0020‑1
- Casartelli NC et al. Differences in gait characteristics between total hip, knee, and ankle arthroplasty patients: a six-month postoperative comparison. Musculoskeletal Disorders, 2013; 14 (1): 176. doi: 10.1186/1471–2474-14–176
- Horstmann T et al. Changes in gait patterns and muscle activity following total hip arthroplasty: a six-month follow-up. Clinical Biomechanics, 2013; 28 (7): 762–769. doi: 10.1016/j.clinbiomech.2013.07.001
- Rasch A et al. Persisting muscle atrophy two years after replacement of the hip. The Journal of Bone & Joint Surgery, 2009; 91 (5): 583–588. doi: 10.1302/0301–620X.91B5.21477
- Jöllenbeck T, Schönle C. Gangverhalten von Patienten nach Knie-TEP während der Rehabilitation. Orthopädie & Rheuma, 2012; 15: 37–41. doi: 10.1007/s15002-012‑0020‑1
- Milner CE. Is gait normal after total knee arthroplasty? Systematic review of the literature. Journal of Orthopaedic Science, 2009; 14: 114–120. doi: 10.1007/s00776-008‑1285‑8
- Handel M et al. Veränderungen der muskulären Leistungsfähigkeit bei Trägern von Kniegelenkstotalendoprothesen. Zeitschrift für Orthopädie und ihre Grenzgebiete, 2005; 143 (5): 581–584. doi:10.1055/s‑2005–836748
- Jöllenbeck T, Schönle C. Gangverhalten von Patienten nach Knie-TEP während der Rehabilitation. Orthopädie & Rheuma, 2012; 15: 37–41. doi: 10.1007/s15002-012‑0020‑1
- Jöllenbeck T. Ganganalyse. In: Stein V, Greitemann B (Hrsg.). Rehabilitation in Orthopädie und Unfallchirurgie. 2. Aufl. Berlin, Heidelberg: Springer, 2015: 20–33
- Jöllenbeck T. Ganganalyse. In: Stein V, Greitemann B (Hrsg.). Rehabilitation in Orthopädie und Unfallchirurgie. 2. Aufl. Berlin, Heidelberg: Springer, 2015: 20–33
- Jöllenbeck T et al. Auswirkungen von Hüft- und Knie-TEP auf die Wirbelsäulenbewegung. Orthopädie, 2023; 52: 652–661. doi: 10.1007/s00132-023–04405‑2
- Jöllenbeck T, Schönle C. Gangverhalten von Patienten nach Knie-TEP während der Rehabilitation. Orthopädie & Rheuma, 2012; 15: 37–41. doi: 10.1007/s15002-012‑0020‑1
- Jöllenbeck T. Ganganalyse. In: Stein V, Greitemann B (Hrsg.). Rehabilitation in Orthopädie und Unfallchirurgie. 2. Aufl. Berlin, Heidelberg: Springer, 2015: 20–33
- Jöllenbeck T, Pietschmann J. Ganganalyse und Gangtraining in der orthopädischen Rehabilitation nach Gelenkersatz – zurück zum normalen Gang, aber wie? Bewegungstherapie und Gesundheitssport, 2019; 35 (1): 3–13. doi: 10.1055/a‑0818–6930
- Pietschmann J, Geu Flores F, Jöllenbeck T. Gait Training in Orthopedic Rehabilitation after Joint Replacement – Zurück zu Normal Gait with Sonification? IJCSS, 2019; 18: 34–48. doi: 10.2478/ijcss-2019–0012
- Jöllenbeck T, Schönle C. Gangverhalten von Patienten nach Knie-TEP während der Rehabilitation. Orthopädie & Rheuma, 2012; 15: 37–41. doi: 10.1007/s15002-012‑0020‑1
- Jöllenbeck T. Ganganalyse. In: Stein V, Greitemann B (Hrsg.). Rehabilitation in Orthopädie und Unfallchirurgie. 2. Aufl. Berlin, Heidelberg: Springer, 2015: 20–33
- Jöllenbeck T, Classen C, Olivier N. Veränderungen ausgewählter ganganalytischer Parameter bei Patienten mit Knieendoprothese während der stationären Rehabilitation. In: Reichel, H (Hrsg.): 56. Jahrestagung der Vereinigung Süddeutscher Orthopäden e. V. Sonderausgabe der Orthopädischen Praxis, 2008: 197 (Abstract)
- Jöllenbeck T, Schönle C. Gangverhalten von Patienten nach Knie-TEP während der Rehabilitation. Orthopädie & Rheuma, 2012; 15: 37–41. doi: 10.1007/s15002-012‑0020‑1
- Jöllenbeck T. Ganganalyse. In: Stein V, Greitemann B (Hrsg.). Rehabilitation in Orthopädie und Unfallchirurgie. 2. Aufl. Berlin, Heidelberg: Springer, 2015: 20–33
- Jöllenbeck T, Classen C, Olivier N. Veränderungen ausgewählter ganganalytischer Parameter bei Patienten mit Knieendoprothese während der stationären Rehabilitation. In: Reichel, H (Hrsg.): 56. Jahrestagung der Vereinigung Süddeutscher Orthopäden e. V. Sonderausgabe der Orthopädischen Praxis, 2008: 197 (Abstract)
- Jöllenbeck T, Schönle C. Gangverhalten von Patienten nach Knie-TEP während der Rehabilitation. Orthopädie & Rheuma, 2012; 15: 37–41. doi: 10.1007/s15002-012‑0020‑1
- Jöllenbeck T. Ganganalyse. In: Stein V, Greitemann B (Hrsg.). Rehabilitation in Orthopädie und Unfallchirurgie. 2. Aufl. Berlin, Heidelberg: Springer, 2015: 20–33
- Jöllenbeck T, Classen C, Olivier N. Veränderungen ausgewählter ganganalytischer Parameter bei Patienten mit Knieendoprothese während der stationären Rehabilitation. In: Reichel, H (Hrsg.): 56. Jahrestagung der Vereinigung Süddeutscher Orthopäden e. V. Sonderausgabe der Orthopädischen Praxis, 2008: 197 (Abstract)
- Jöllenbeck T. Ganganalyse. In: Stein V, Greitemann B (Hrsg.). Rehabilitation in Orthopädie und Unfallchirurgie. 2. Aufl. Berlin, Heidelberg: Springer, 2015: 20–33
- Jöllenbeck T, Neuhaus D, Grebe B. Schlüsselparameter zur Optimierung des Gangverhaltens in der Rehabilitation bei Patienten nach Knie- und Hüft-TEP. DRV-Schriften, 2010; 88: 352–354
- Schaffert N, Mattes K. Effects of acoustic feedback training in elite-standard Para-Rowing. Journal of Sports Science, 2015; 33 (4): 411–418. doi: 10.1080/02640414.2014.946438
- Gorgas AM et al. Short-Term Effects of Real-Time Auditory Display (Sonification) on Gait Parameters in People with Parkinsons’ Disease – A Pilot Study. In: Ibáñez J et al. (Hrsg.). Converging Clinical and Engineering Research on Neurorehabilitation II. Berlin, Heidelberg: Springer, 2017: 855–859
- Füldner M. Inertialsensoren für innovative Applikationen in der Medizintechnik. In: Tagungsband der 16. GMA/ITG-Fachtagung Sensoren und Messsysteme. München: Analog Devices, 2012: 17–28. doi:10.5162/sensoren2012/1.1.1
- Institut für Angewandte Trainingswissenschaft. Den Ursachen von Verletzungen und Dysbalancen auf der Spur. IAT-Newsletter, 05/2019, Seite 2. (Zugriff am 16.08.2023)
- Regensburger M et al. Inertial Gait Sensors to Measure Mobility and Functioning in Hereditary Spastic Paraplegia: A Cross-Sectional Multicenter Clinical Study. Neurology, 2022; 99: e1079–1089. doi: 10.1212/WNL.0000000000200819
- Jöllenbeck T, Pietschmann J. Ganganalyse und Gangtraining in der orthopädischen Rehabilitation nach Gelenkersatz – zurück zum normalen Gang, aber wie? Bewegungstherapie und Gesundheitssport, 2019; 35 (1): 3–13. doi: 10.1055/a‑0818–6930
- Pietschmann J, Geu Flores F, Jöllenbeck T. Gait Training in Orthopedic Rehabilitation after Joint Replacement – Zurück zu Normal Gait with Sonification? IJCSS, 2019; 18: 34–48. doi: 10.2478/ijcss-2019–0012
- Pietschmann J, Jöllenbeck T, Geu Flores F. Gangtraining mit Sonifikation zur Wiederherstellung des normalen Ganges nach endoprothetischem Gelenkersatz. In: Schwirtz A, Mess F, Demetriou Y, Senner V (Hrsg.). Innovation & Technologie im Sport. Abstractband zum 23. dvs-Hochschultag in München vom 13.–15. September 2017. Hamburg: Feldhaus, 2017: 65
- Jöllenbeck T, Schönle C. Gangverhalten von Patienten nach Knie-TEP während der Rehabilitation. Orthopädie & Rheuma, 2012; 15: 37–41. doi: 10.1007/s15002-012‑0020‑1
- Jöllenbeck T, Classen C, Olivier N. Veränderungen ausgewählter ganganalytischer Parameter bei Patienten mit Knieendoprothese während der stationären Rehabilitation. In: Reichel, H (Hrsg.): 56. Jahrestagung der Vereinigung Süddeutscher Orthopäden e. V. Sonderausgabe der Orthopädischen Praxis, 2008: 197 (Abstract)
- Jöllenbeck T, Neuhaus D, Grebe B. Schlüsselparameter zur Optimierung des Gangverhaltens in der Rehabilitation bei Patienten nach Knie- und Hüft-TEP. DRV-Schriften, 2010; 88: 352–354
- Pietschmann J, Jöllenbeck T. Feedbacktraining vs. Training in virtueller Umgebung – neueste Erkenntnisse zur Wiederherstellung des normalen Gangs nach Knie-TEP. In: Hermsdörfer J, Stadler W, Johannsen L (Hrsg.). The Athlete’s Brain: Neuronale Aspekte motorischer Kontrolle im Sport. Hamburg: Feldhaus, 2015: 178–179
- Pietschmann J, Jöllenbeck T. Visuelles Feedbacktraining vs. Training in virtueller Umgebung – Wiederherstellung des normalen Ganges nach Hüft- und Knie-TEP. In: Könecke T, Preuß H, Schöllhorn W I (Hrsg.). Moving Minds – Crossing Boundaries in Sport Science. Hamburg: Feldhaus, 2015: 76
- Schaffert N, Mattes K. Effects of acoustic feedback training in elite-standard Para-Rowing. Journal of Sports Science, 2015; 33 (4): 411–418. doi: 10.1080/02640414.2014.946438
