Einleitung
Nach dem Prothesenschaft ist der Prothesenfuß der wichtigste Bestandteil einer Unterschenkelprothese. Vielfältige Ausführungen werden am Markt angeboten. Der zweckmäßige Prothesenfuß für den Amputierten muss entsprechend seiner physischen und psychischen Leistungsfähigkeit ausgewählt werden. Daher sollte der Orthopädie-Techniker nicht nur genaue Kenntnisse über den Amputierten haben, sondern muss sich auch über die biomechanischen Wirkungsweisen verschiedener Prothesenfußkonzepte im Klaren sein. Denn nach einer transtibialen Amputation stehen wichtige biomechanische Funktionselemente (z. B. Sprunggelenk und Unterschenkelmuskulatur 1) nicht mehr zur Verfügung. Diese Verluste sollten mittels prothetischer Passteile möglichst gut kompensiert werden. Analytische Testverfahren können helfen, Prothesenfußkonstruktionen zu verbessern und den Amputierten bestmöglich zu versorgen.
Ziel war es, den Einfluss verschiedener Konstruktionseigenschaften von Prothesenfüßen auf das Gangbild transtibial Amputierter zu untersuchen und anhand der Ergebnisse Hinweise zur Auswahl des individuell optimalen Prothesenfußes zu geben.
Untersuchungsmethodik
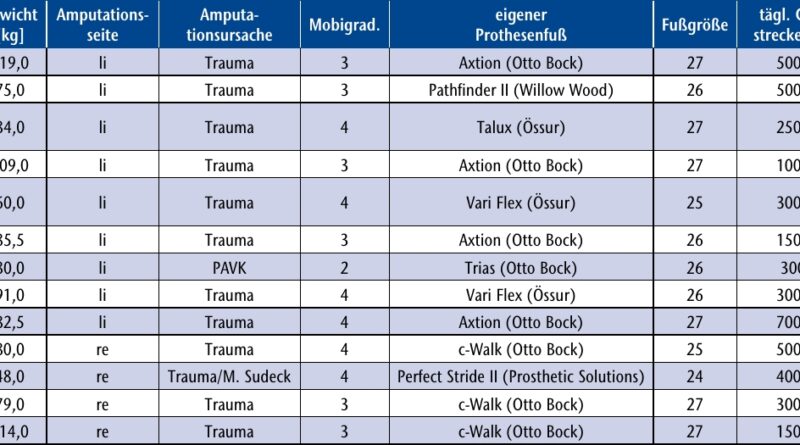
Untersucht wurden 13 unterschenkelamputierte Probanden (Alter 48,7 ± 11,8 Jahre), die zum Zeitpunkt der Untersuchung seit 13,5 ± 11,4 Jahren amputiert waren und keine gangbeeinträchtigenden Begleiterkrankungen aufwiesen. Weitere Probandendaten sind in Tabelle 1 aufgeführt.
Folgende Untersuchungsmethoden wurden angewendet:
- Erfassung kinetischer und kinematischer Parameter 2 beim Gehen auf ebenem Boden mit selbst gewählter Geschwindigkeit mittels Vicon 460 mit 6 Kameras und Plug-in-Gait-Markermodell sowie 1 × Kistler- + 2 × AMTI-Kraftmessplatten;
- Balancetests: statisch = Einbeinstand max. 30 Sekunden, dynamisch = Balancieren über Balancebrett 20 × 100 × 300 mm Hin-Wende-Zurück;
- patientenzentrierte Assessmentverfahren.
Es wurde jeweils ein Versuchsdurchlauf aller Untersuchungsmethoden mit dem probandeneigenen Prothesenfuß und einer mit dem Echelon-Fuß (Testfuß: Endolite, Deutschland) durchgeführt. Der Grund, den Echelon als Testfuß im Vergleich zu den probandeneigenen Prothesenfüßen (gelenklose, energierückgebende Füße) zu verwenden, liegt in seinen Konstruktionseigenschaften als Gelenkfuß: Er besitzt ein hydraulisch gesteuertes Knöchelgelenk mit einem ortsfesten Drehzentrum und getrennt einstellbare Widerstände für Plantarflexion und Dorsalextension mit einem Gelenk-Range-of-Motion von insgesamt 9° (6° Plantarflexion und 3° Dorsalextension). Die Karbonfedern von Rückfuß und Vorfuß sind getrennt voneinander am Trägerchassis befestigt und können in ihrer Federstärke jeweils vom Orthopädie-Techniker ausgewählt werden. Zudem ist die Vorfußfeder geteilt, was eine Pro- und Supinationsbewegung des Fußes erlaubt. Aufgrund dieser Eigenschaften erschien der Vergleich zwischen dem Echelon und den probandeneigenen Prothesenfüßen sinnvoll, um möglichst unterschiedliche Gangeinflüsse in Abhängigkeit von den Konstruktionseigenschaften eines Prothesenfußes verifizieren zu können.
Allen Probanden stand hierbei eine Einlaufphase mit dem Testfuß von ca. 1 Stunde zur Verfügung. Die gewonnenen Daten aller Verfahren wurden in PASW 18 (PASW Statistics, IBM, USA) eingegeben. Mit PASW 18 erfolgte:
- die Berechnung deskriptiver Statistiken,
- die Prüfung der Normalverteilung per Kolmogorow-Smirnow-Test,
- die Prüfung von Mittelwertunterschieden per T‑Test und Wilcoxon-Test sowie
- die Prüfung von Korrelationen: zweiseitig bivariat Spearman-Rho.
Für alle Testverfahren wurde ein Konfidenzintervall von 95 % angenommen.
Ergebnisse
Ganganalyse
Der Seitenvergleich zwischen gesunder und amputierter Seite ergab eine signifikante Verkürzung der Standphasendauer (Echelon p = 0,009; eigener Prothesenfuß p = 0,008 mittels T‑Test) und eine Erhöhung der Schrittlänge auf der amputierten Seite (Echelon p = 0,037; eigener Prothesenfußp = 0,047 mittels T‑Test) sowie eine signifikante Verringerung des Ausmaßes der Kniegelenksbewegung (Echelon und eigener Prothesenfuß jeweils p = 0,005 mittels T‑Test) auf der amputierten Seite. Als Ausmaß (engl. „range”) der Kniegelenksbewegung wurde in diesem Falle die Differenz zwischen maximalem Flexions- und Extensionswinkel während eines Gangzyklus bezeichnet. Diese Seitenunterschiede wurden bereits in der Literatur beschrieben 3.
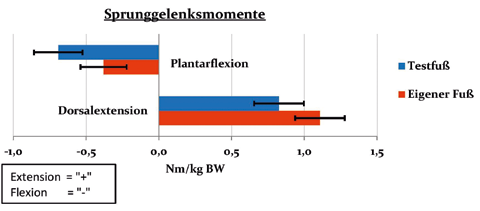
Von größerem Interesse war der Vergleich Testfuß gegen probandeneigenen Fuß unter besonderer Betrachtung der Sprunggelenksmomente. Beim Tragen des Testfußes wurde eine signifikante Erhöhung der plantarflektierenden und eine signifikante Verringerung der dorsalextendierenden Momentenmaxima (Abb. 1; Plantarflexion p = 0,00004; Dorsalextension p = 0,002 mittels T‑Test) ermittelt.
Die plantarflektierenden Momente am Gelenkdrehpunkt des Testfußes waren gegenüber denen des probandeneigenen Prothesenfußes erhöht (negative Vorzeichen ergaben sich systembedingt, da eine Bewegungsrichtung als positive Richtung festgelegt werden musste; Messwerte können als Absolutwerte angesehen werden). Die Momente der Plantarflexion unterschieden sich um fast 50 %. Die dorsalextendierenden Gelenkmomente erwiesen sich beim Testfuß als geringer. Die Unterschiede in der Dorsalextension waren geringer als die in der Plantarflexion.
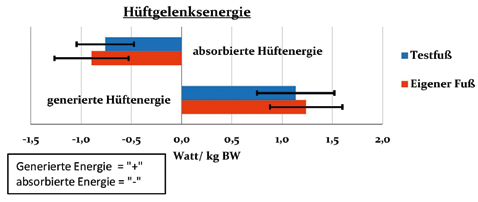
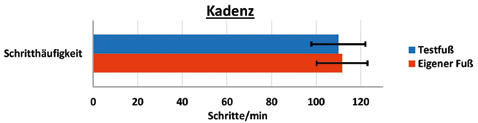
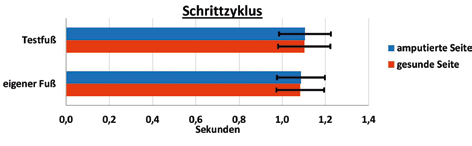
Die Differenzen der Energiebilanz am Hüftgelenk ergaben ebenfalls signifikante Unterschiede (absorbierte Energie p = 0,040; generierte Energie p = 0,048 mittels T‑Test) (Abb. 2; Maxima). Die Messdaten zeigten eine Verringerung des Anteils der absorbierten Energie im Bereich des Hüftgelenkes von 15,3 % und eine Minimierung der generierten Energie von 8,4 % bei den Untersuchungen mit dem Testfuß. Bei der Kadenz wurde eine signifikante Verringerung (p = 0,038 mittels T‑Test) von ca. 2 Schritten zugunsten des Testfußes festgestellt. Die Probanden vollzogen ca. 110 Schritte mit dem Testfuß und ca. 112 mit ihrem eigenen Prothesenfuß (Abb. 3). Infolge der verringerten Schritthäufigkeit beim Tragen des Testfußes kam es gleichzeitig zum Anstieg der Zyklenzeit (amputierte Seite p = 0,040; gesunde Seite p = 0,024 mittels T‑Test; Abb. 4) um 0,02 Sekunden.
Balancetests
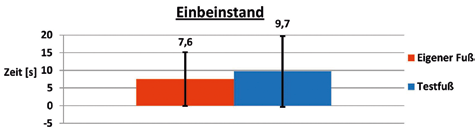
Die statistische Auswertung ergab beim Vergleich der Standzeiten des Einbeinstandes keine signifikanten Unterschiede. Dennoch ließ sich eine Tendenz zugunsten einer Standzeitverlängerung von 28,6 % zugunsten des Testfußes nachweisen (Abb. 5). Beim Balancieren auf dem Balancebrett konnten ebenfalls keine signifikanten Unterschiede festgestellt werden. Beim Balancieren zeigte sich eine Zunahme der erfolgreichen Versuche von 8 auf 10 beim Einsatz des Testfußes.
Assessmentverfahren
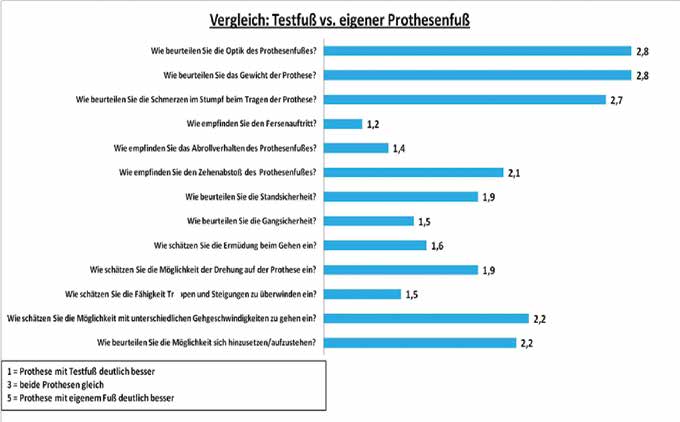
In keinem der im Fragebogen erfassten Parameter wurde der eigene Prothesenfuß besser eingeschätzt, da die Mittelwerte aller Parameter kleiner als 3 waren (3 = beide Prothesen gleich). Nach subjektiver Einschätzung durch die Probanden erwies sich demnach der Testfuß in allen Parametern als vorteilhafter. Insbesondere hinsichtlich Fersenauftritt, Abrollverhalten, Gangsicherheit, Treppensteigen und Ermüdung erzielte der Testfuß deutlich bessere Einschätzungen. 69,2 % der Befragten schätzten die Gangsicherheit mit dem Testfuß höher ein als mit dem eigenen Prothesenfuß; in Bezug auf die Ermüdung waren es 61,5 %. Gewicht und Optik sowie das Schmerzempfinden wurden von den Probanden als nahezu gleich zwischen Testfuß und dem eigenen Prothesenfuß eingeschätzt (Abb. 6).
Interpretation
Der Vergleich der untersuchten Prothesenfüße erbrachte nur wenige Parameter mit signifikanten Unterschieden. Daraus kann gefolgert werden, dass sowohl der Testfuß als auch die von den Probanden bereits getragenen gelenklosen, energierückgebenden Prothesenfüße annähernd gleiche biomechanische Wirkungen beim Gehen auf ebenem Untergrund hervorrufen. Die differenten Momente am oberen Sprunggelenk ließen sich dabei anhand der Konstruktionsmerkmale des Testfußes erklären. Als echter Gelenkfuß mit einem ortsfesten Drehzentrum und dadurch mit fest definierten Längen für Vorfuß- und Rückfußhebel ergaben sich beim Fersenauftritt erhöhte plantarflektierende Momente durch die Vergrößerung der Rückfußhebellänge, zum Ende der Standphase verringerte dorsalextendierende Momente durch Verkürzung der Länge des Vorfußhebels 4. Die daraus resultierenden Annahmen einer erhöhten initialen Knieflexion und einer verringerten Knieextension während der mittleren und terminalen Standphase wurden jedoch nicht erfüllt. Stattdessen zeigte sich eine verringerte initiale Kniebeugung, was für ein erhöhtes Sicherheitsbedürfnis des Amputierten spricht.
Das verringerte Dorsalextensionsmoment beim Tragen des Testfußes führte auch zu einer abgeschwächten Knieextension zum Ende der Standphase, welche die erhaltenen Kniestrukturen im Sinne einer verhinderten Hyperextension schonte. Anhand der subjektiven Einschätzungen der Probanden konnten die ermittelten Momente am oberen Sprunggelenk ebenfalls nicht eindeutig interpretiert werden, denn die Probanden gaben an, sogar einen weicheren Fersenauftritt, ein runderes Abrollverhalten und einen verbesserten Vortrieb mit dem Testfuß zu verspüren.
Die Hydraulikeinheit des Testfußes nahm die auftretenden Knöchelmomente auf und sorgte somit im Zusammenspiel mit den Karbonfederelementen für eine ausgewogene Fersendämpfung, ein rundes Roll-over-Verhalten und ein energieeffizienteres Abstoßverhalten. Bei patientengerechter Justierung des Hydraulikwiderstandes am Echelon empfanden die Probanden reduzierte Belastungen am Stumpf und beschrieben den Zehenabstoß als energiesparender im Vergleich zum eigenen Prothesenfuß.
Dieses subjektive Empfinden wird durch die ganganalytischen Ergebnisse im Bereich der Hüftgelenksenergie untermauert. So wurde vom Hüftgelenk beim Einsatz des Testfußes zum Ende der Standphase (ca. 40 bis 50 % des Schrittzyklus 5) im Mittel 15,3 % weniger Energie absorbiert. Das bedeutete für die Fortbewegung des Probanden, dass er 15,3 % weniger Energie bei jedem Schritt zum Abbremsen seiner Masse benötigte. Zudem kam es bei ca. 60 bis 70 % der Schrittabwicklung zur Einsparung von 8,4 % an generierter Hüftenergie. Die Folge war eine Energieersparnis von 8,4 % pro Schritt, um die benötigte Flexion von Knie- und Hüftgelenk zum problemlosen Durchschwingen des Beines zu realisieren. In der Summe ergab sich somit für jeden Schritt eine Energieersparnis von 23,7 %.
Bei den Zeit-Distanz-Parametern lagen ebenfalls signifikante Unterschiede beim Vergleich der untersuchten Prothesenfüße vor. So machten die Probanden mit dem Testfuß weniger Schritte pro Minute und erhöhten folglich auch die Dauer eines Einzelschrittes. Obgleich die Unterschiede zwischen den Absolutwerten sehr gering waren, bleibt die Tatsache bestehen, dass die Probanden mit dem Testfuß weniger Schritte benötigten, um die gleiche Strecke zurückzulegen. Ebenfalls erhöhte sich die Zyklenzeit beim Tragen des Testfußes um rund 0,02 Sekunden. In Verbindung mit der Verringerung der Kadenz ließ die erhöhte Zyklenzeit auf ein höheres Vertrauen zum Testfuß schließen und bestärkte die Annahme, dass das Gehen mit dem Testfuß effektiver für die Amputierten war.
Bessere Leistungen mit dem Testfuß erreichten die Probanden auch bei den Balancetests. Beim Einbeinstand mit dem Testfuß steigerten die Amputierten ihre Standzeit um 2,1 Sekunden. Die hydraulisch gesteuerte Gelenkkonstruktion des Testfußes ermöglichte eine ständige Ausrichtung des Körperschwerpunktes über der hier reduzierten Bodenunterstützungsfläche, ohne dass dies bei Gewichtsverlagerung ein sofortiges Abheben von Ferse oder Fußspitze bzw. ein abruptes Einsetzen des Vorfuß- bzw. Rückfußhebels zur Folge hatte. Es ergab sich dadurch kein extern wirkendes Drehmoment auf die darüber liegende Gelenkkette, was ein sofortiges Ungleichgewicht des Amputierten nach sich gezogen und gegebenenfalls zu einer Gefahrensituation geführt hätte. Somit konnten die Probanden die auftretenden Schwankungen mit dem Testfuß und den noch erhaltenen Teilen des Beines kompensieren und die Ausgleichsbewegungen des Rumpfes verringern. Dies ließ die Amputierten sicherer, effektiver und mit verminderter Wirbelsäulenbelastung stehen. Neben der objektiven Datenerfassung diente der Fragebogen als wichtiges Bewertungsinstrument der getesteten Prothesenfüße. Die Ergebnisse brachten subjektive Vorteile seitens des Testfußes hervor.
Durch die Ergebnisse der vorliegenden Studie konnten beim Vergleich zwischen gesunder und amputierter Seite zahlreiche signifikante Unterschiede bei den Gangparametern „Kräfte”, „Momente” und „Energie” nachgewiesen werden, die auch durch eine optimale Prothesenversorgung nicht vollständig kompensiert werden können. Bedingt durch verschiedene Prothesenfußkonstruktionen werden die Auswirkungen auf die Gangparameter Unterschenkelamputierter sichtbar.
Die Ergebnisse der hier eingesetzten objektiven Testverfahren belegen, dass Unterschenkelamputierte mit dem Echelon-Fuß energieeffizientere Gangmuster erreichen können. Hierfür waren die physikalischen Wirkungen einer hydraulischen Gelenkeinheit, eines Karbonfedersystems aus voneinander getrennter Vorfuß- und Rückfußfeder sowie einer in sich geteilten Vorfußfeder im Sinne von Pround Supinationsbeweglichkeit verantwortlich. Es kam infolgedessen zu einem stets vollflächigen Aufstehen des Testfußes auf dem Boden. Die Probanden gaben an, auch schwierige Gangsituationen wie das Überwinden von Bordsteinkanten sowie wechselnde und unebene Geländegegebenheiten in der Einlaufphase sicherer absolvieren zu können, was sich mit den Untersuchungsergebnissen von Su et al. 6 deckt.
Das ständige flächige Aufstehen des Fußes auf dem Untergrund sparte Energie durch die nicht notwendige zusätzliche Stabilisierungsarbeit der darüberliegenden Gelenkkette, verzögerte die Ermüdung beim Laufen und vermittelte Komfort und Wohlbefinden. Außerdem ermöglichte der Testfuß anhand von Dorsalextensions- und Plantarflexionsbewegung ein problemloses Gehen auf Schrägen und ein leichtgängiges Überwinden von Treppenstufen und Hindernissen.
Diese Vorteile bei den Aktivitäten des täglichen Lebens resultierten aus den Einschätzungen durch die Probanden, wurden jedoch nicht ganganalytisch untersucht. Dennoch bewirken diese Vorteile eine höhere Sicherheit für die Probanden. Des Weiteren werden Energiebilanz, Kadenz und Zyklenzeit positiv beeinflusst. Es ergab sich im Einzelnen eine Energieersparnis von 23,7 % pro Schritt im Bereich des Hüftgelenkes. Diese Energieersparnis können die Amputierten nutzen, um ihre tägliche Gehstrecke um rund 24 % bei gleichbleibendem Energieverbrauch zu verlängern, was einen eindeutigen Mobilitätszuwachs darstellt.
Anhand der subjektiven Bewertungen erweist sich der Testfuß für die Probanden beim Bewältigen schwieriger alltagsrelevanter Gehsituationen als vorteilhafter und vermindert die Ermüdung beim Gehen. Infolgedessen kommt es zu einer Zunahme der Gangsicherheit und einer Minderung des Sturzrisikos. Zudem können das kontralaterale Bein und die Wirbelsäule spürbar entlastet werden. Die verbesserte Lebensqualität der Amputierten kann dazu beitragen, ihre Teilhabe am gesellschaftlichen Leben und ihre Erwerbsfähigkeit zu verbessern.
Schlussfolgerungen
Die Ergebnisse der Studie können Hinweise zur Auswahl eines patientengerechten Prothesenfußes geben bzw. die Auswahl eines Passteils gegenüber dem Kostenträger rechtfertigen. In jedem Fall bedarf der Einsatz eines Hilfsmittels der individuellen Prüfung und Entscheidung durch das interdisziplinäre Team aus Arzt, Orthopädie-Techniker und Therapeut sowie Kostenträger. Die Ergebnisse zeigen, dass die Eigenschaften eines Prothesenfußes den Gang eines transtibial Amputierten deutlich beeinflussen. Die Vorteile des Testfußes gegenüber gelenklosen Prothesenfüßen konnten sowohl durch objektive als auch durch subjektive Untersuchungsmethoden nachgewiesen werden.
Es besteht kein Interessenkonflikt bezüglich der Finanzierung dieser Studie. Ich danke der Firma Endolite Deutschland für das kostenlose Bereitstellen der Testfüße.
Für die Autoren:
Dipl.-Ing. (FH) Marcus Erler
Dorfstraße 1a
07607 Gösen
marcus.erler83@googlemail.com
Begutachteter Beitrag / reviewed paper
Erler M, Layher F, Sander K, Ziegenthaler H. Einfluss des Echelon-Prothesenfußes auf das Gangbild von Unterschenkelamputierten. Orthopädie Technik, 2014; 65 (7): 40–45
- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Blumentritt S et al. Biomechanisch-ganganalytische Bewertung von Prothesenfüßen. Medizinisch-Orthopädische Technik, 1994; 114: 287–292
- Davis RB, DeLuca PA, Ounpuu S. Chapter 25: Analysis of Gait. In: Bronzino JD (ed.). The Biomechanical Handbook (second edition). Boca Raton: CRC Press LLC, 2000
- Erler M. Einfluss der Eigenschaften eines Prothesenfußes auf das Gangbild von Unterschenkelamputierten. Diplomarbeit im Studiengang Orthopädie- und Rehatechnik am Fachbereich Krankenhaus- und Medizintechnik, Umwelt- und Biotechnologie der Technischen Hochschule Mittelhessen. Gießen-Friedberg, 2011
- Moser D, Abimosleh F, Zahedi S, Harris G, Ross J, McCarthy J. Biomechanical analysis of a novel automatically self-aligning ankle-foot prosthesis. Orthopädie Technik Quarterly English Edition III, 2009: 10–14
- Perry J. Ganganalyse — Norm und Pathologie des Gehens. 1. Auflage. München, Jena: Urban und Fischer Verlag, 2003
- Su PF, Gard SA, Lipschutz RD, Kuiken TA. The Effects of Increased Prosthetic Ankle Motions on the Gait of Persons with Bilateral Transtibial Amputations. Am J Phys Med Rehabil, 2010; 89 (1): 34–47
