Einleitung
Ein Mensch mit transfemoraler Amputation ist mit einer Vielzahl von Einschränkungen konfrontiert. Eine davon ist der massive Verlust von Muskulatur. Der damit verbundene Verlust an Kraft 1 2 3 kann nur ungenügend durch eine konventionelle Prothese ausgeglichen werden – Prothesenanwender müssen dieses Defizit im Wesentlichen mithilfe ihrer Stumpfmuskulatur kompensieren. So muss ein Anwender beispielsweise aufgrund der fehlenden kniestreckenden Muskulatur der betroffenen Seite ein prothetisches Kniegelenk mittels eines internen Extensionsmoments der Hüfte sichern. Wie hoch dieses Moment ausfällt, ist vom Aktivitätsgrad und der Stumpfleistungsfähigkeit des Anwenders, dem Aufbau der Prothese und den Passteileigenschaften abhängig 4.

Ein Schwerpunkt in der Entwicklung prothetischer Kniepassteile lag in den letzten Jahren auf intelligenten computerisierten Kniepassteilen, die ihre Steifigkeit (Drehmoment pro Winkeländerung) im Sinne einer Dämpfung entsprechend der Gangphase anpassen können. In der Standphase ist eine hohe Steifigkeit gefragt, um eine gute Standphasenstabilität zu gewährleisten, wohingegen in der Schwungphase eine geringe Steifigkeit erwünscht ist, um das Durchschwingen der Prothese und damit eine adäquate Schwungphasenfreiheit zu gewährleisten. Die Anpassung der Steifigkeit wird z. B. über Ventile eines Hydraulikzylinders oder auch durch eine magnetorheologische Flüssigkeit geregelt, die unter Einfluss eines Magnetfeldes ihre Viskosität ändert.
Trotz dieser fortschrittlichen Techniken ermöglichen diese Kniegelenke nicht jedes erdenkliche Bewegungs- oder Gangmuster. Zum großen Teil ist dies darauf zurückzuführen, dass diese Konstruktionen nur exzentrische Momente aufnehmen können und nicht in der Lage sind, ein konzentrisches Moment zu erzeugen. So können beispielsweise ein C‑Leg© (Otto Bock, Duderstadt, Deutschland) oder ein Rheo Knee© den Anwender beim Hinsetzen durch eine höhere Steifigkeit bzw. ein exzentrisches Moment unterstützen. Demzufolge muss der Anwender nicht alleine mit seiner erhaltenen Seite seinen Körperschwerpunkt absenken, und die erhaltene Seite wird somit geringer belastet. Auf der anderen Seite sind diese Kniegelenke nicht in der Lage, das Aufstehen aus dem Sitzen durch ein konzentrisches Moment zu unterstützen. Das Gelenk kann also nicht den Körperschwerpunkt des Anwenders aktiv anheben. Mit diesen „passiven” bzw. nicht leistungsgenerierenden Konstruktionen sind somit alle Bewegungs- und Gangmuster, in denen ein konzentrisches Kniegelenksmoment benötigt wird, unter physiologischen Gesichtspunkten nur bedingt möglich. Hierzu gehört auch das alternierende Hinaufgehen einer Treppe.
Es gibt jedoch auch Anwender, denen es gelingt, mit einem einfachen mechanischen Gelenk alternierend eine Treppe hinaufzugehen. Hobara und Kollegen zeigen dies in einer Studie über zwei Probanden mit Oberschenkelamputation 5. Eine weitere Ausnahme bildet das Genium-Kniegelenk, das ebenfalls das alternierende Hinaufgehen einer Treppe ermöglicht und dies durch eine angepasste Regelung der Steifigkeit bzw. durch ein komplettes „Blockieren” des Gelenks in eine Bewegungsrichtung unterstützt 6. In beiden Fällen muss der Anwender jedoch das fehlende konzentrische Moment im prothetischen Kniegelenk durch ein verstärktes intern extendierendes Hüftmoment ersetzen, um sich auf die nächste Stufe heben zu können. Das Einbinden eines Motors ist eine naheliegende Lösung, um mit einem prothetischen Kniegelenk ein konzentrisches Gelenkmoment generieren zu können.
Die Entwicklungen der jüngsten Zeit deuten darauf hin, dass die nächste Generation prothetischer Passteile vermehrt aktive Komponenten beinhalten wird. Das an der Vanderbilt University (Nashville, Tennessee, USA) konzipierte aktive prothetische Bein, das zwischenzeitlich durch Freedom Innovations (Irvine, Kalifornien, USA) weiterentwickelt wird, ist nur ein Beispiel hierfür 7 8 9. Ein weiteres Beispiel ist das BiOM-T2-System, ein Prothesenfuß, der in der Lage ist, den Anwender durch aktives Abstoßen zu unterstützen 10 11. Unter den prothetischen Kniegelenken ist das Power Knee© bis dato das einzige motorisierte Kniegelenk auf dem Markt. Für diese Fallstudie wurde ein Proband mit Oberschenkelamputation beim Gehen mit dem Power Knee und dem konventionellen mikroprozessorgesteuerten Kniegelenk Rheo Knee© unter verschiedenen Gehbedingungen untersucht, um Unterschiede zwischen beiden Konzepten aufzuzeigen.
Material und Methoden
Ein Proband mit einer traumatisch bedingten Oberschenkelamputation (39 Jahre, 173 cm, 70 kg) wurde mit zwei unterschiedlichen Prothesen ausgestattet. Für beide Prothesen wurde der identische passgerechte Schaft mit unterschiedlichen Passteilkombinationen eingesetzt. Als Passteile wurden zum einem das Rheo Knee© der zweiten Generation (kurz RK) mit einem Ceterus©-Prothesenfuß, zum anderen das Power Knee© der zweiten Generation (kurz PK) in Kombination mit einem Variflex-Prothesenfuß untersucht (alle Passteile Össur, Reykjavik, Island). Der Proband durchlief für beide Passteilkombinationen eine instrumentelle 3‑D-Ganganalyse für das Gehen in der Ebene und für das Hinauf- und Hinabgehen einer Treppe (5 Stufen, jeweils 15 cm hoch, 32 cm tief) und einer Rampe (7,5°, ca. 4 m lang) (Abb. 1).
Hierfür wurde ein optoelektronisches Bewegungsanalysesystem der Firma Vicon (Oxford, Großbritannien) eingesetzt. Markerkugeln, die auf der Haut bzw. der Prothese angebracht werden, definieren dabei Segmente, die als Berechnungsgrundlage für die Gelenkwinkel dienen. Die Positionierung der Marker auf den entsprechenden anatomischen Landmarken des Probanden und die Berechnungen der Kinematik (Gelenkwinkel) und Kinetik (Gelenkmomente und Leistungen) erfolgten gemäß dem biomechanischen Modell „Plugin-Gait” (Vicon). Dieses basiert auf den Arbeiten von Kadaba und Kollegen 12 13. Für die Berechnung der Kinetik werden die Bodenreaktionskräfte benötigt. Hierfür standen drei Kraftmessplatten (Kistler, Winterthur, Schweiz) zur Verfügung.
Für die Messung der Kinetik auf der Treppe und Rampe wurden Boxen in den Konstruktionen vorgesehen, die mit der Kraftmessplatte verbunden sind, jedoch keinen Kontakt zum übrigen Aufbau haben. Prinzipiell kann beim Hinaufgehen einer Treppe mit einem Beistellschritt und bei dem hier eingesetzten Messaufbau keine Kinetik aufgenommen werden, da ein gleichzeitiger Bodenkontakt beider Beine auf einer Kraftmessplatte gegeben ist. Ein separater Bodenkontakt mit nur einem Bein auf einer Kraftmessplatte ist jedoch Voraussetzung zur Berechnung der Kinetik. Mittels einer Software wurde in der Nachbearbeitung mit der von Simon et al. beschriebenen Methode die Orientierung der Kraftmessplatten im Raum entsprechend dem Aufbau angepasst 14.
Für diese Studie wurde sowohl die sagittale Kinematik des Hüftgelenks und des Kniegelenks als auch die Kinetik der Hüfte und des Kniegelenks jeweils für die betroffene Seite betrachtet. Als Datenbasis dienten über mehrere Schritte gemittelte Gehdurchgänge der Probanden. Als Referenz diente ein Kollektiv von 20 unversehrten Probanden (30,2 J. ± 9,3 J.). Die Abweichungen der Gangkurven zum Referenzkollektiv wurden mittels des von Wolf et al. beschriebenen Normabstands (ND) quantifiziert 15. Hierbei werden die Unterschiede zwischen den Zeitreihen als Standardabweichung der Referenz angegeben (Tab. 1). Für die Kniegelenkskurve der betroffenen Seite eines Prothesenanwenders sagt eine ND von 2 beispielsweise aus, dass diese Zeitreihe im Mittel um zwei Standardabweichungen des Referenzkollektivs von der Kniegelenkskurve des Referenzkollektivs abweicht. Somit kann mittels des ND als einzelnen Wertes eine erste Aussage über die Gangqualität getroffen werden. In dieser Studie wurde der ND über den gesamten Gangzyklus gebildet.
Ergebnisse
Normabstand
Beim Gehen in der Ebene weist das Power Knee (PK) im Vergleich zum Rheo Knee (RK) den geringeren Normabstand (ND) für die Parameter des prothetischen Kniegelenks auf, wohingegen die Hüftkinematik und auch das Hüftmoment der betroffenen Seite beim RK besser an die Norm angenähert sind. Innerhalb der Konditionen, unter denen ein konzentrisches Moment gefragt ist, wie dem Hinaufgehen einer Rampe oder Treppe, weist das PK für die Knie- und Hüftparameter der betroffenen Seite die bessere Annäherung an das Referenzkollektiv auf. Beim Hinaufgehen einer Treppe zeigen sich deutliche Unterschiede zwischen beiden prothetischen Kniegelenken. Das PK ermöglicht ein alternierendes Hinaufgehen einer Treppe (Step over Step 16). Die unversehrten Probanden des Referenzkollektivs gingen die Treppe ebenfalls mit einer Step-over-Step-Strategie hinauf. Konsequenterweise zeigt sich innerhalb dieser Kondition ein geringerer Normabstand (ND) für das PK im Vergleich zum RK. Mit dem RK ging der Anwender mittels eines Beistellschritts der betroffenen Seite die Treppe hinauf (Step by Step 17). Dieses Muster unterscheidet sich deutlich vom alternierenden Hinaufgehen einer Treppe. Das RK zeigt eine bessere Annäherung von Kinematik und Kinetik für Hüfte und Knie innerhalb der Konditionen, bei denen generell exzentrische Kniemomente auftreten, wie dem Hinuntergehen einer Treppe bzw. Rampe.
Kinematik und Kinetik
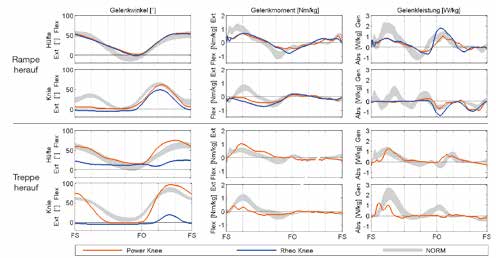
Es werden nur Konditionen mit primär konzentrischen Gelenkmomenten wie das Hinaufgehen einer Rampe bzw. Treppe betrachtet, da hier vorrangig die Unterschiede zwischen den Gelenken und damit den Funktionsprinzipien aufgezeigt werden sollen. Im Wesentlichen sind Unterschiede bei den Gelenkmomenten und Leistungen zu finden. So zeigt sich beim PK für das Hinaufgehen einer Rampe im Vergleich zum RK eine Reduktion des intern flektierenden Hüftmoments und der Leistungsgenerierung der Hüfte (Abb. 2). Für das Hinaufgehen der Treppe zeigen sich deutliche Unterschiede der betroffenen Seite in der Knie- und Hüftkinematik. Da das RK nur im Beistellschritt nachgeführt wird, weist es nahezu kein Bewegungsausmaß auf, weswegen die Hüfte im Verlauf des Gangzyklus ebenfalls kaum gebeugt wird. Während des alternierenden Hinaufgehens der Treppe mit dem PK zeigt sich eine Knie- und Hüftkinematik, die an die Werte der Referenz angenähert ist. Weiter ergeben sich für die betroffene Seite Knie- und Hüftmomente sowie Leistungen, die durchaus mit den physiologischen Werten der Referenz vergleichbar sind. Während des Hinaufgehens der Treppe ist das intern extendierende Hüftmoment der betroffenen Seite mit dem PK in Relation zur Referenz jedoch erhöht.
Diskussion
Insbesondere unter Gehbedingungen, bei denen im Wesentlichen konzentrische Kniegelenksmomente gefordert sind, wie beim alternierenden Hinaufgehen einer Treppe bzw. Rampe, zeigt das PK in der Kinematik und Kinetik des Hüft- und Kniegelenks eine bessere Annäherung an die Werte der Referenz. Dies wird durch einen geringeren Normabstand in den entsprechenden Konditionen für die jeweiligen Zeitreihen objektiviert. Die Möglichkeit des PK, Treppen alternierend hinaufzugehen, ist als wesentlicher Funktionszugewinn zu werten. Die beiden Strategien beim Hinaufgehen von Treppen, der Nachstellschritt (Step by Step 18) und das alternierende Treppensteigen (Step over Step 19), unterscheiden sich vor allem hinsichtlich ihrer Effizienz: Während die erhaltene Seite beim Step by Step allein zum Anheben des Körperschwerpunkts genutzt wird, teilt sich beim Step over Step die Arbeit auf die erhaltene Seite und die betroffene Seite auf. Der Anwender ist damit schneller, und einer Überlastung der erhaltenen Seite wird vorgebeugt, insbesondere wenn zur Kompensation der geringeren Geschwindigkeit beim Step by Step mehrere Stufen gleichzeitig mit der erhaltenen Seite überwunden werden.
Während des alternierenden Treppensteigens mit PK zeigen die Hüft- und Kniemomente sowie die Hüft- und Knieleistung analoge Werte im Vergleich zum Referenzkollektiv. Das intern extendierende Hüftmoment während der Standphase ist im Vergleich zur Referenz jedoch erhöht. Dies bestärkt unseren klinischen Eindruck, dass, obwohl das PK in dieser Kondition ein konzentrisches Kniemoment erzeugt, eine adäquate Stumpfleistungsfähigkeit vorhanden sein muss, um dieses Gangmuster umzusetzen. Die Ergebnisse des Referenzkollektivs zeigen, dass ein simultanes Extendieren der Hüfte und des Kniegelenks mit einer entsprechenden Generierung von Moment und Leistung nötig ist, um den Körperschwerpunkt auf die nächste Stufe zu heben. Konsequenterweise muss der Anwender eines PK ebenfalls ein entsprechendes Hüftmoment mit entsprechender Hüftleistung generieren, um dieses Bewegungsmuster auszuführen. Aus diesem Grund sollte der Kraftstatus der Hüfte bei einer Versorgung von Oberschenkelamputierten mit einem aktiven prothetischen Kniegelenksystem nicht außer Acht gelassen werden.
Im Gegensatz zum PK zeigt sich für das RK eine bessere Annährung an die Werte der Referenz unter Gangkonditionen, bei denen überwiegend exzentrische Momente gefordert sind. Es ist zu beachten, dass dem RK ein anderes Konzept zugrunde liegt: Hier ist ein „Dämpfer” verbaut, der entsprechend der Gangsituation die exzentrischen Momente aufnimmt. Der Motor des PK ist primär zur Generierung von Moment und Leistung eingefügt. Er kann zwar, entsprechend geregelt, auch exzentrische Momente aufnehmen; dies scheint aber im hier beobachteten Fall beim RK besser zu funktionieren. Die geringeren Werte des Normabstands für das RK unter Gangkonditionen, bei denen ein überwiegend exzentrisches Moment gefordert ist, deuten darauf hin.
Ob die hier dargestellten Ergebnisse der Fallstudie allgemeingültig und typisch für Anwender mit einer Oberschenkelamputation sind, müsste mit einer Kohortenstudie überprüft werden. Die Messungen fanden im Jahr 2011 statt. Über persönliche Kommunikation mit dem Hersteller haben wir erfahren, dass zwischenzeitlich die Steuerung und Regelung des Power Knee mehrere Updates erfahren hat, in denen u. a. die Treppenerkennung verbessert wurde. Dies ist bei der Interpretation der Daten ebenfalls zu beachten.
Zusammenfassend zeigt sich, dass die Unterstützung des prothetischen Kniegelenks durch einen zusätzlichen Motor funktionelle Vorteile für den Anwender bietet, dieser jedoch auch ein adäquates Leistungsniveau aufweisen muss, um die zur Verfügung gestellte Leistung des Kniegelenks unter allen Gehbedingungen umsetzen zu können. Die Probleme der „Hardware” mit einer limitierten Leistungsgenerierung bis hin zur begrenzten Energieversorgung scheinen mittlerweile geringer als die Probleme der „Software” zu sein. Die Software, die das Kniegelenk regelt und steuert, ist in Zukunft noch weiter so zu optimieren, dass man eine intuitiv einsetzbare Versorgung erreicht. Auch die Sensorik ist noch weiter zu optimieren. Diese muss vorrangig eine geeignete Schnittstelle zum Anwender schaffen, die gut unterscheidbare Signale liefert, um der softwareseitigen Steuerung und Regelung die entsprechenden Informationen zur Verfügung zu stellen.
Bei einer ausgefeilten Steuerung und Regelung mit einer entsprechenden Sensorik sind unter Umständen auch mit einer passiven Konstruktion Gehbedingungen zu meistern, die ein konzentrisches Kniemoment erfordern, siehe das Beispiel Genium© (Otto Bock, Duderstadt, Deutschland). Die beim Genium erforderlichen Bewegungsmuster, um beispielsweise das alternierende Hinaufgehen einer Treppe umzusetzen, sind jedoch noch nicht intuitiv und bedürfen einer längeren Eingewöhnungs- und Lernphase von bis zu drei Monaten 20. Eine Einschätzung von Professor Hugh Herr fasst die derzeit noch vorherrschenden Probleme der aktiven Prothetik gut zusammen: „Eine Person mit einer körperlichen Einschränkung kann erst dann von dieser Technologie profitieren, wenn wir es schaffen, einen höheren Energiefluss einzubringen, und diesen gleichzeitig intelligent steuern und regeln” (frei übersetzt 21).
Danksagung
Wir danken der Firma Össur für die im Rahmen der Studie zur Verfügung gestellten Passteile; des Weiteren wurden die Unkosten des Probanden von der Firma Össur übernommen.
Für die Autoren:
Dipl.-Ing. (FH) Daniel Heitzmann
Laboringenieur für Orthopädie- & Rehatechnik
Bereiche Bewegungsanalytik
Stiftung Orthopädische
Universitätsklinik Heidelberg
Schlierbacher Landstraße 200a
69118 Heidelberg
daniel.heitzmann@med.uni-heidelberg.de
Begutachteter Beitrag / reviewed paper
Heitzmann DWW, Wolf SI, Alimusaj M. Fallstudie eines Anwenders mit transfemoraler Amputation: Gehen mit einem aktiven Prothesenkniegelenk. Orthopädie Technik, 2014; 65 (7): 34–39

![Normabstand (ND) für die Zeitreihen der sagittalen Knie-Hüftkinematik (Gelenkwinkel [°]) und Knie-Hüftkinetik (Gelenkmomente [Nm/kg] und -leistungen [W/kg]) für die betroffene Seite bei unterschiedlichen Gehbedingungen (graue Balken = prozentuale Darstellung, wobei 0 % dem kleinsten und 100 % dem höchsten ND bei allen Gehbedingungen entspricht; fett gedruckter Normabstand (ND) = ND Gelenk A < ND Gelenk B; ① Kinematik, Gelenkwinkel; ② Kinetik, Gelenkmoment; ③ Kinetik, Gelenkleistung; ④ in dem hier verwendeten Messaufbau ist die Aufnahme von Kinetik beim Heraufgehen einer Treppe mit einem Beistellschritt nicht möglich).](https://360-ot.de/wp-content/uploads/2020/08/ot_14-07_tab_1_Normabstand_Knie-Hueftkinematik_heitzmann-721x445.png)
- Myoelektrische Orthesenversorgung bei Plexusverletzung der oberen Extremität – Vorstellung eines hybriden bionischen Konzepts — 6. Mai 2026
- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Jaegers SM, Arendzen JH, de Jongh HJ. Changes in hip muscles after above-knee amputation. Clin Orthop Relat Res, 1995; (319): 276–284
- Heitzmann D, et al. Können Gangabweichungen von transfemoral und transtibial amputierten Patienten auf Kraftdefizite der betroffenen Seite zurückgeführt werden? Orthopädie Technik, 2011; 62 (5): 321–332
- Heitzmann DW, et al. Integrating strength tests of amputees within the protocol of conventional clinical gait analysis: a novel approach. Biomed Tech (Berl), 2013; 58 (2): 195–204
- Blumentritt, S. Biomechanische Aspekte zur Indikation von Prothesenkniegelenken. Orthopädie Technik, 2004; 55 (6): 508–521
- Hobara H, et al. Lower extremity joint kinematics of stair ascent in transfemoral amputees. Prosthet Orthot Int, 2011; 35 (4): 467–472
- Bellmann M, et al. Stair ascent with an innovative microprocessor-controlled exoprosthetic knee joint. Biomed Tech (Berl), 2012; 57 (6): 435–444
- Sup F, Varol HA, Goldfarb M. Upslope walking with a powered knee and ankle prosthesis: initial results with an amputee subject. IEEE Trans Neural Syst Rehabil Eng, 2011; 19 (1): 71–78
- Sup F, et al. Self-Contained Powered Knee and Ankle Prosthesis: Initial Evaluation on a Transfemoral Amputee. IEEE Int Conf Rehabil Robot, 2009: 638–644
- Sup F, et al. Preliminary Evaluations of a Self-Contained Anthropomorphic Transfemoral Prosthesis. IEEE ASME Trans Mechatron, 2009; 14 (6): 667–676
- Au S, Berniker M, Herr HM. Powered ankle-foot prosthesis to assist level-ground and stair-descent gaits. Neural Netw, 2008; 21 (4): 654–666
- Herr HM, Grabowski AM. Bionic ankle-foot prosthesis normalizes walking gait for persons with leg amputation. Proc Biol Sci, 2012; 279 (1728): 457–464
- Kadaba MP, et al. Repeatability of kinematic, kinetic, and electromyographic data in normal adult gait. J Orthop Res, 1989; 7 (6): 849–860
- Kadaba MP. Ramakrishnan HK, Wootten ME. Measurement of lower extremity kinematics during level walking. J Orthop Res, 1990; 8 (3): 383–392
- Simon JR, Alimusaj M, Wolf SI. Kinetics on Ramps and Stairs Using Floor Level Mounted Force Plates. Gait Posture, 2007; 26: S11
- Wolf S, et al. Automated feature assessment in instrumented gait analysis. Gait Posture, 2006; 23 (3): 331–338
- Reid SM, et al. Knee biomechanics of alternate stair ambulation patterns. Med Sci Sports Exerc, 2007; 39 (11): 2005–2011
- Reid SM, et al. Knee biomechanics of alternate stair ambulation patterns. Med Sci Sports Exerc, 2007; 39 (11): 2005–2011
- Reid SM, et al. Knee biomechanics of alternate stair ambulation patterns. Med Sci Sports Exerc, 2007; 39 (11): 2005–2011
- Reid SM, et al. Knee biomechanics of alternate stair ambulation patterns. Med Sci Sports Exerc, 2007; 39 (11): 2005–2011
- Schmalz T, Blumentritt S, Ludwigs E. Zur Gewöhnungszeit bei Neuversorgungen von Beinprothesen, Leipzig: Orthopädie + Reha-Technik Kongress, 2012
- Landau M. HST Symposium Shows Look, Feel of Biotech Future. News from Harvard Medical, Dental, & Public Health Schools, 2003 (April 4). http://archives.focus.hms.harvard.edu/2003/April4_2003/health_sciences_technology.html [ 01.04.2014]
