1. Einführung
Die heutzutage zum Einsatz kommenden Hilfsmittel (Anti-Dekubitus-Systeme, Rollstühle, Gesundheitsschuhe, Orthesen etc.) erzeugen oft in den kontaktierten Weichgeweberegionen kritische Belastungen in Form mechanischer Spannungen und Verformungen und sind deshalb häufig nicht nur nicht hilfreich, sondern können sogar den Krankheitszustand verschlimmern und schwerwiegende Sekundärerkrankungen auslösen. Abgesehen von dem großen Leid der Betroffenen und deren Angehörigen entstehen volkswirtschaftliche Schäden in beträchtlicher Höhe.
Ob nun ein Hilfsmittel geeignet ist oder nicht, kann nur dann objektiv entschieden werden, wenn dessen mechanische Wirkungen auf die Körperregionen bekannt sind. Hierfür kommen heute (leider) immer noch sowohl im klinischen Alltag als auch in zertifizierten Prüfinstituten Druck-Sensor-Matten zum Einsatz, obwohl diese bekanntlich nur über planare Kontaktdrücke zwischen Hautoberfläche und Hilfsmittel, nicht aber über das sehr komplexe, dreidimensionale Interaktionsgeschehen zwischen Mensch und Hilfsmittel Auskunft geben können. Schon gar nicht können damit Scherspannungen, geschweige denn Spannungen in tiefer gelegenen Gewebeschichten bis hin zum Knochen, gemessen werden. Abgesehen von der Messfehler- und Kalibrierungs- sowie Vergleichbarkeitsproblematik untereinander 1 2 und des eigenen (unbekannten) Material-Strukturverhaltens dieser Sensormatten (die Matte verhindert einen direkten Kontakt zwischen Person und Hilfsmittel), kann diese Prüfung vor allem deswegen keine Aussage über die prophylaktische und/oder therapeutische Eignung eines Hilfsmittels liefern, da der auf dem System liegende Mensch (Nutzer/Patient) keine oder nur eine unzureichende Berücksichtigung findet.
2. Neue Methode: BOSS-Verfahren
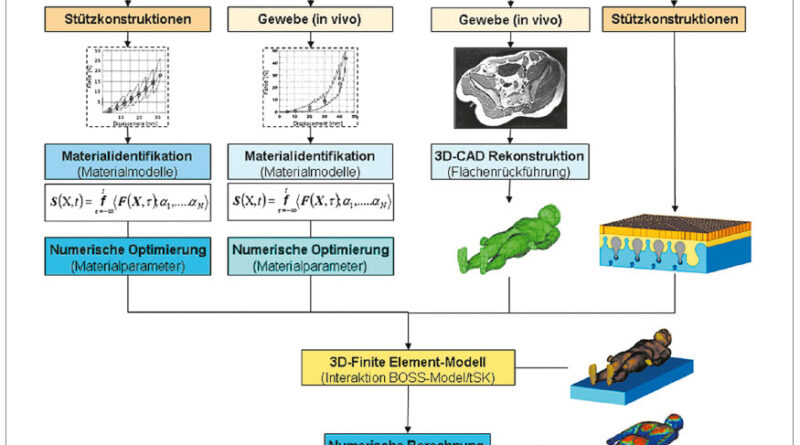
Das neu entwickelte BOSS-Verfahren (BOSS steht für Body Optimization and Simulation System) konzentriert sich nicht nur (wie sämtliche derzeitigen Methoden) auf die technische Charakterisierung des jeweiligen Hilfsmittels, sondern bezieht den Nutzer (Patient) voll mit ein und ist im Wesentlichen durch die drei Blöcke „Experimente“, „Bildgebende Verfahren“ und „Konstruktionsdaten (CAD-Daten)“ gekennzeichnet (Abb. 1). Dabei wird die Anatomie des menschlichen Körpers oder relevanter Körperregionen (ggf. inklusive Organen und Blutgefäßen) mithilfe von Probanden und bildgebenden Verfahren (Magnet-Resonanz-Tomografie, kurz: MRT) erfasst, daraus deren CAD-Modelle in Form von Oberflächen mithilfe von 3D-Rekonstruktionstools gewonnen und schließlich ein mittels der Finite Elemente Methode (FEM) digitalisiertes Menschmodell generiert. Die für die Simulationen erforderlichen in vivo-Eigenschaften des Menschmodells werden über nicht-invasive in vivo-Versuche an (lebenden) Probanden etwa durch Eindruckversuche o. ä. ermittelt.
Auf Basis dieser experimentellen Befunde werden dann mithilfe kontinuumsmechanischer Materialgleichungen und geeigneter numerischer Optimierungsalgorithmen die Materialparameter determiniert (Materialidentifikation) 3 4 5 6 7 8 9 10. Sämtliche digitalisierten Daten der o. g. drei Blöcke münden dann in ein numerisches „Gesamt-Tool“ in Form eines FE-Modells, mittels dessen das sehr komplexe und dreidimensionale mechanische Interaktionsgeschehen zwischen Person und jeweiligem Hilfsmittel berechnet und simuliert werden kann. Dies ermöglicht eine genaue Analyse der Spannungs‑, Verzerrungs- bzw. Verformungsverteilungen im Inneren der Fett-Gewebe-Muskel-Verbünde bis hin zu den jeweiligen Knochenstrukturen beim Liegen oder Sitzen infolge der Interaktion etwa mit Liege- bzw. Sitzsystemen. Darüber hinaus kann schließlich eine Optimierung von Geometrie und Material des Hilfsmittels unter Berücksichtigung eines Optimierungskriteriums (etwa minimale Spannungen an exponierten Knochenstrukturen) erfolgen.
3. Ergebnisse
Generierung sitzender virtueller Menschmodelle
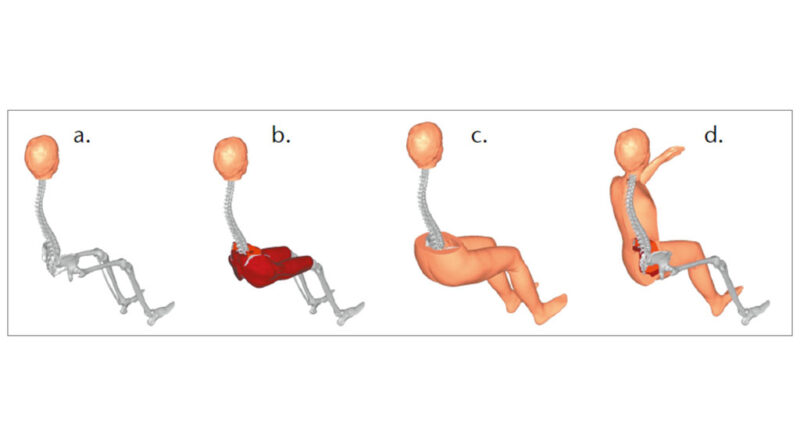
Da hier insbesondere über die Optimierung von Sitzsystemen referiert werden soll, wird im Folgenden exemplarisch die Vorgehensweise zur Generierung von Menschmodellen in sitzender Position eingegangen. Der einzige Unterschied zur Generierung liegender Menschmodelle besteht darin, dass zur Erfassung der menschlichen Anatomie ein so genanntes Upright-MRT zum Einsatz kommt. Dabei ist es verfahrensbedingt sinnvoll, zunächst nur den Oberkörper mit entsprechender Krümmung bzw. Winkelstellung des Rückens und in einem zweiten Schritt den Unterkörper mit Gesäß und entsprechenden Winkeln zwischen Ober- und Unterschenkeln in stehender Position mit gebeugten Knien aufzunehmen. Zur Gewährleistung eines undeformierten Gesäßes in sitzender Position ist die Hinzuziehung einer speziellen MRT-kompatiblen Vorrichtung erforderlich, in welcher der Proband in kniender Stellung, als Ersatzhaltung für das Sitzen, während der gesamten Messprozedur zu verharren hat. Eine Nachbearbeitung und Zusammenführung dieser Daten mittels verschiedener Softwaren für die 3D-Rekonstruktion (Flächenrückführung) der Anatomie führt dann beispielsweise auf das in Abbildung 2 dargestellte komplette Oberflächenmodell einer weiblichen 43-jährigen und 59 kg schweren Person mit einer Körpergröße von 1,65 m.
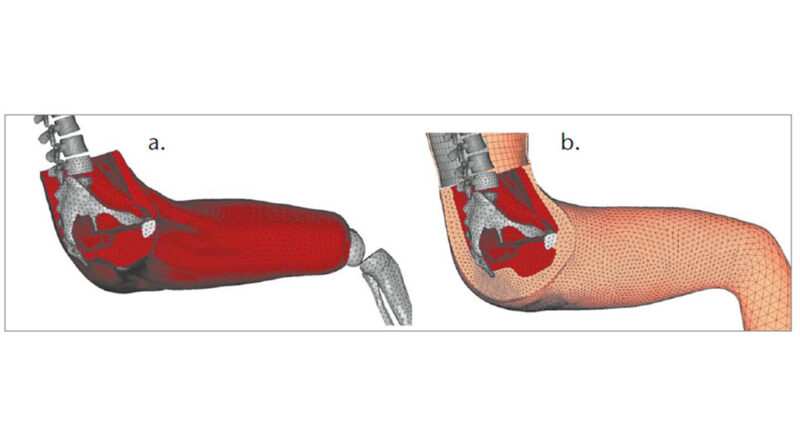
In Abbildung 3 ist deutlich der Verbund von Muskel- und Knochenstrukturen (Beckenknochen) zu sehen. Die Weichgewebematerialien (Fett- und Muskelverbünde) insbesondere der Gluteus- und der Oberschenkelregion sind hierbei durch nicht-lineare hyperelastische in vivo-Materialeigenschaften charakterisiert. Im Folgenden werden auf Basis generierter BOSS-Modelle (in liegender und sitzender Position) beispielhaft die Ergebnisse aus Berechnungen und Simulationen einiger wichtiger Interaktionen mit Liege- bzw. Sitzsystemen gezeigt.
Biomechanische Optimierung eines Liegesystems
Das Ziel dieses Vorhabens bestand in der Entwicklung und Optimierung eines Liegesystems auf Basis des Druck-Gegendruck-Prinzips mit optimalem Liegekomfort für den medizinischen Einsatz. Infolge dieses Prinzips soll jeder Teil des Körpers vom Kopf über die Wirbelsäule und das Becken bis hin zu den Beinen in jeder Lage optimal unterstützt werden. Weiterhin soll durch die Eigenbewegung des Körpers und sogar durch die Atembewegungen das Druck-Gegendruck-System dergestalt aktiviert werden, dass ein Massieren des ganzen Körpers mikrofein während der gesamten Schlaf- und Erholungszeit stattfindet und somit ein gesunder und entspannter Schlaf gewährleistet werden kann.
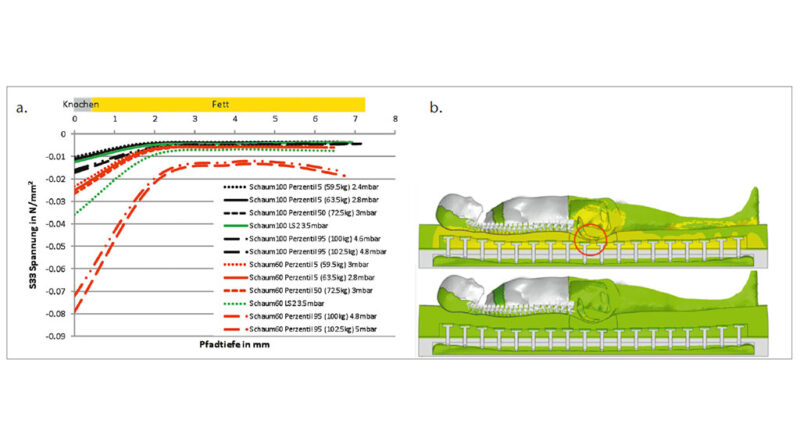
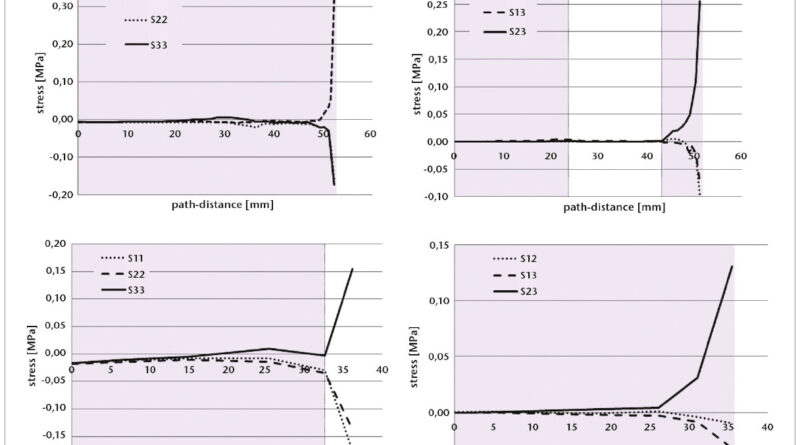
Das Ausgangs-Schlafsystem, welches aus Querträgern mit jeweils T‑förmigem Profil, Führungen für jeden T‑Träger, einer mit Luft gefüllten Membran (Luftmatratze) und einer das Ganze umhüllenden Weichschaumstoffschicht (Abb. 4b) aufgebaut war, wurde im Rahmen des Projektes mit den oben beschriebenen Methoden sukzessive optimiert. Die Interaktionssimulationen zwischen dem optimierten Liegesystem und diversen Perzentil-Modellen eines männlichen Menschmodells zeigen, dass die zunächst angenommene Dicke der Schaumstoffschicht von 60 mm für die schwereren Perzentil-Modelle nicht ausreichend ist. Beispielsweise kommt es mit dem Perzentil-Modell 95, 41 bis 60 Jahre, 102,5 kg infolge zu großer Deformationen der Schaumstoffschicht im Bereich der Steißregion zu einem kritischen „Berührungsbereich“ zwischen Hilfsmittel und Gesäß (Abb. 4b oben) mit der Folge hoher Spannungen im Gewebeinneren. Durch eine Erhöhung der Schaumstoffschichtdicke auf 100 mm gelingt eine Entschärfung dieses Problems insofern, als dass sich neben einer mechanischen Entlastung der Schaumstoffschicht bei allen Perzentil-Modellen eine Herabsenkung der Normalspannungen* S33 (in Gravitationsrichtung) im Gewebeinneren zeigt (Abb. 4a u. b unten).
In Abbildung. 4a sind die sich an einem von der Hautoberfläche bis zum Steiß verlaufenden Knotenpfad einstellenden Spannungen S33 aller Perzentil-Modelle, allerdings jetzt unter Berücksichtigung der Gewichte jeweils beider Arme, für beide Schaumstoffdicken 60 mm und 100 mm einander gegenübergestellt. Danach zeigen sich deutlich niedrigere Gewebespannungen bei einer Schaumstoffdicke von 100 mm. Die Berücksichtigung der Armgewichte zog teilweise eine Erhöhung des Membrandruckes der Luftmatratze nach sich, wobei eine Erhöhung des Membrandruckes von 2,8 mbar auf 3,5 mbar erforderlich war. Generell steigen die Gewebespannungen zur Knochenstruktur hin drastisch an. Die berechneten Ergebnisse konnten mit Hilfe des Probanden grundsätzlich verifiziert werden.
Berechnung und Analyse mechanischer Interaktionen Mensch/Sitzsystem
Im Folgenden wird analog zu den vorstehenden Ausführungen exemplarisch auf die Interaktion des in Abbildung 2 dargestellten weiblichen und eines männlichen Menschmodells mit einem Autositz eingegangen. Abbildung 5 gibt die berechneten von MISES-Spannungen** in der Sagittalebene der Sitzhöckerregion beider Modelle infolge des Autositzes wieder. Danach stellen sich im Inneren der Gesäßregion und den sich anschließenden Teilen des Oberschenkels sowohl für den männlichen als auch weiblichen Probanden qualitativ sehr ähnliche Spannungsverteilungen ein.
Dies wird grundsätzlich durch die in Abb. 6 dargestellten Spannungsverläufe entlang der gemäß Abb. 5 definierten Knotenpfade bestätigt, wobei allerdings beim Mann die Normalspannungen S11 bzw. S33 als Zug- bzw. Druckspannung auftreten, während sich die Vorzeichen bei der Frau genau umkehren. Deutlich zu erkennen sind weiterhin ein drastischer Anstieg sämtlicher Spannungen zum Knochen (Sitzhöcker) hin sowie die gleiche Größenordnung von Normal- und Scherspannungen, womit Letztere zur Beurteilung derartiger Interaktionen stets mit einzubeziehen sind.
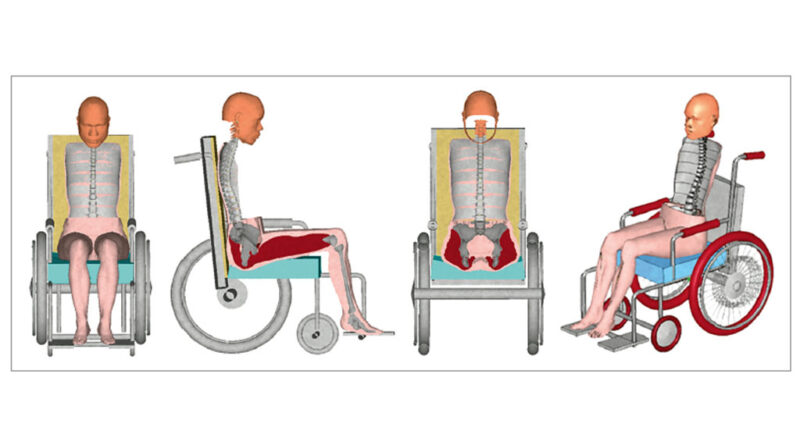
Anwendung auf die Interaktion mit einem Rollstuhlkissen
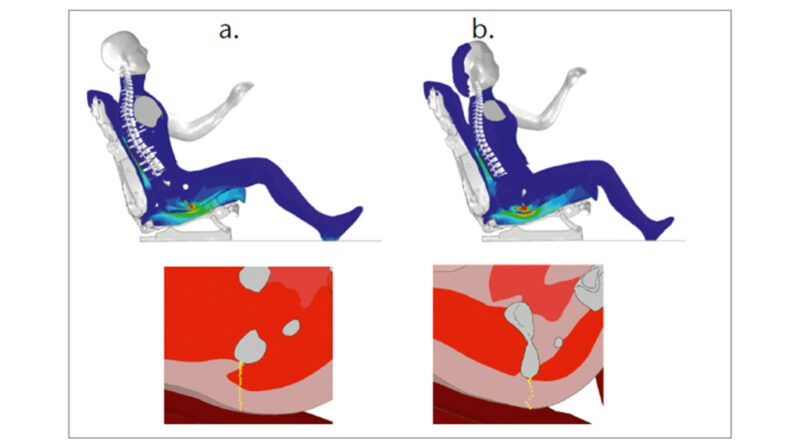
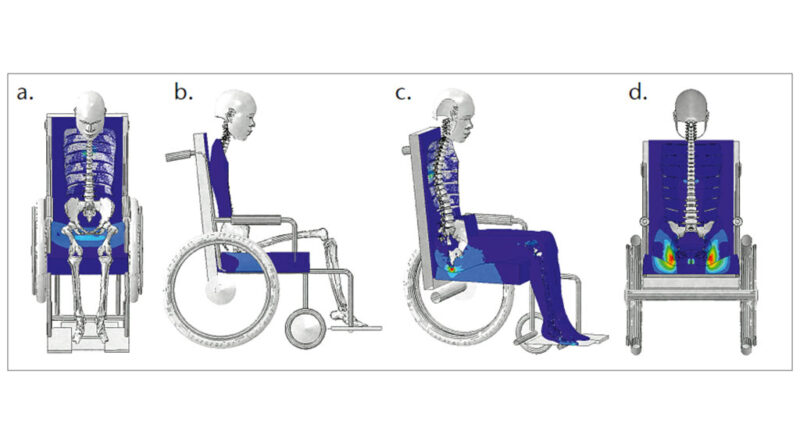
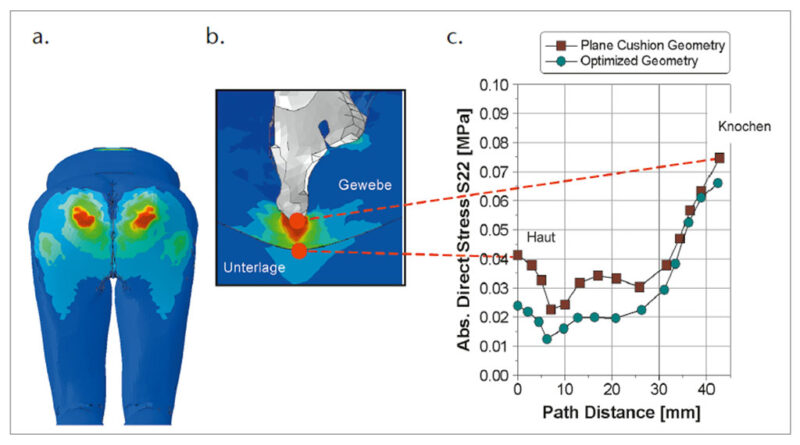
Im Folgenden wird die im Rahmen einer ersten Pilotstudie durchgeführte Anwendung des oben beschriebenen Verfahrens auf Rollstuhlkissen referiert. Abbildung 7 zeigt die prinzipielle Situation der Sitzverhältnisse eines Menschen im Rollstuhl. In Abbildung 8c sind die Normalspannungsverteilung (in Gravitationsrichtung) in der Sagittalebene und in Abbildung 8c die Scherverzerrungsverteilung in der Frontalebene der Sitzhöckerregion eines männlichen (gesunden) BOSS-Modells infolge der Interaktion mit einem (nicht formoptimierten) quaderförmigen Schaumstoffsitzkissen dargestellt.
Der sich für diese Interaktion ergebende Normalspannungsverlauf S22 (in Gravitationsrichtung) von der Hautoberfläche bis zum Knochen (Sitzhöcker) ist in Abbildung 9c wiedergegeben. Dabei ist wieder deutlich zu erkennen, dass die (mittels Sensormatten nicht messbare) Belastung am Knochen sehr viel höher als an der Hautoberfläche ist. Anmerkung: Es sei darauf hingewiesen, dass zur Erzeugung zukünftiger realitätsnäherer Ergebnisse selbstverständlich ein BOSS-Modell auf Basis eines Patienten (Rollstuhlfahrer) zu generieren wäre, wobei sich dann sicherlich die anatomischen Verhältnisse insbesondere die Fettgewebe-Muskel-Verbünde in der Gluteus- und Oberschenkelregion gegenüber denjenigen eines gesunden Probanden enorm unterscheiden würden.
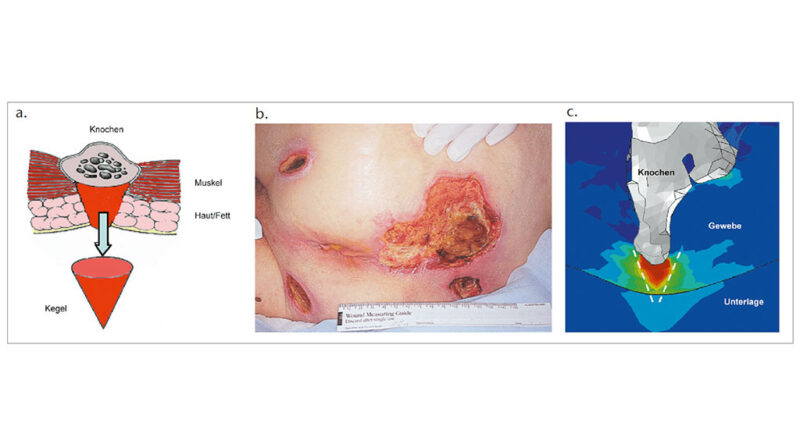
In diesem Zusammenhang sei auf das grundsätzliche Problem der Dekubitusentstehung hingewiesen: Gemäß des Wissensstandes der plastischen Chirurgie 11 12 13 14 breitet sich ein Dekubitus meist von innen (also vom Knochen) nach außen zur Hautoberfläche in Form eines Kegels aus (Abb. 10a), sodass bei Erscheinen der ersten Rötung an der Hautoberfläche die eigentlich größere Gewebeschädigung bereits am Knochen stattgefunden hat. Die kegelförmige Ausbreitung ließ sich hier mittels Simulation sehr deutlich verifizieren (Abb. 10c).
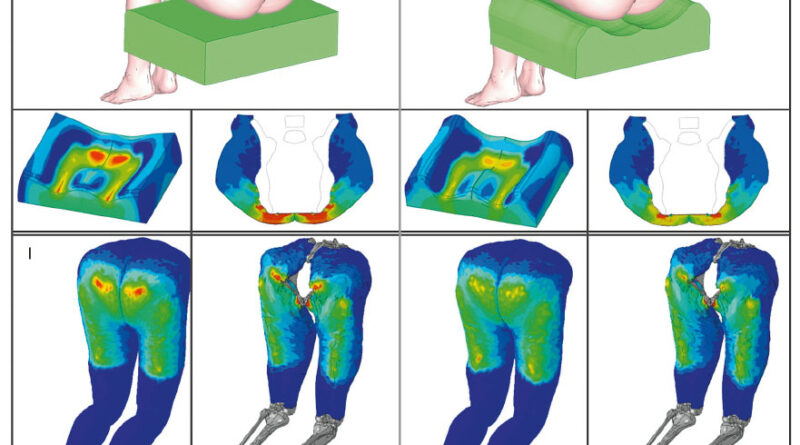
Formoptimierung einer Sitzkissenoberfläche (Verfahren)
Die Möglichkeit einer Dekubitusprophylaxe (oder auch Therapie) mittels adäquater, biomechanisch optimierter Hilfsmittel lässt sich nun durch einen am Institut des Autors entwickelten Algorithmus bewerkstelligen 15 16. Mit dessen Hilfe lassen sich Hilfsmittel aller Art (Sitz- und Liegesysteme, Schuhe etc.) mit beliebiger Geometrie und beliebigem Material unter Hinzuziehung eines geeigneten Optimierungskriteriums – also etwa im vorliegenden Falle der Forderung minimaler Spannungen am Sitzhöcker – optimal gestalten. Damit wurde das in den vorstehenden Rechnungen zugrunde gelegte quaderförmige Rollstuhlsitzkissen aus Weichschaumstoff (Abb. 8 u. 11 links) einer Formoptimierung unterzogen, wobei sich die in Abbildung 11 (rechts) dargestellte Sitzkissenoberfläche ergab. Es ist deutlich zu erkennen, dass sich im Falle der optimierten Variante eine wesentlich niedrigere Belastung sowohl an der Hautoberfläche als auch im Gewebeinneren (etwa Fettgewebe-Muskel-Interface) einstellt. Diese Tatsache wird besonders anhand von Abbildung 9c deutlich (siehe dort die grün gekennzeichnete Kurve), wonach sich eine Reduktion der Spannungen an der Hautoberfläche um etwa 45 % ergibt.
4. Resümee
Die bislang im klinischen Alltag und in Prüfinstituten zum Einsatz kommenden Methoden zur Prüfung und Gestaltung von Anti-Dekubitus-Systemen (ADS), wie etwa Sensormatten, geben keinen Aufschluss über das komplexe dreidimensionale Interaktionsgeschehen zwischen Mensch und ADS. Auf Basis des BOSS-Verfahrens können mithilfe von Probanden erzeugte digitale Menschmodelle mit in vivo-Eigenschaften durch realitätsnahe Computersimulationen erstmalig die infolge der Interaktionen mit einem ADS entstehenden mechanischen Druck- und Zug- sowie die möglicherweise viel gefährlicheren Scherspannungen sogar in tieferen Gewebeschichten bis hin zum Knochen an jeder beliebigen Stelle im menschlichen Körper dreidimensional dargestellt („sichtbar“ gemacht) werden.
Im Vergleich zu den bisher üblichen und eher mit Messfehlern und Vergleichbarkeitsproblemen behafteten Auflagedruckmessungen ermöglicht dieses Verfahren eine adäquate und differenzierte Prüfung und Bewertung von ADS. Der allerdings nicht zuletzt auch im wirtschaftlichen Interesse viel spannendere Aspekt einer Anwendung des BOSS-Verfahrens liegt darin, dass dieses im Rahmen einer Entwicklung und Optimierung von Hilfsmitteln derart zum Einsatz kommen kann, dass das Interaktionsszenario am Rechner mit Blick auf eine optimale Verletzungsprävention bzw. einen maximalen Komfort solange durchgespielt wird, bis Spannungen an gefährdeten anatomischen Stellen minimiert worden sind. Derart unter Berücksichtigung biomechanisch entwickelter Designvorgaben, vor einer aufwändigen und teuren Fertigung per Simulationen am Rechner gestaltete und dann erst gefertigte Anti-Dekubitus-Systeme, Gesundheitsschuhe, Prothesen etc. vermindern das Verletzungsrisiko sehr effizient und/oder erhöhen den Sitz- und Trage-Komfort.
Danksagung
Der Autor bedankt sich bei seinem ehemaligen Mitarbeiter Dr. rer. med. Christophe Then sowie den Mitarbeitern Dipl.-Ing. Alexander Asmus, B. Eng Hoang Minh Le, Dipl.-Ing. Joachim Menger und Dipl.-Ing. Andreas Schmidt für die Bereitstellung der Ergebnisse und Bilder, auf dessen Grundlage dieser Artikel entstanden ist. Ferner wurden die dargestellten Ergebnisse durch die vom Hessischen Ministerium für Wissenschaft und Kunst (HMWK) zugedachte Förderung des LOEWE-Schwerpunktes Präventive Biomechanik (PräBionik) ermöglicht.
Der Autor:
Prof. Dr.-Ing. habil. Gerhard Silber
Geschäftsführender Direktor des Instituts für Materialwissenschaften (IfM)
Fachhochschule Frankfurt am Main
– University of Applied Sciences –
Nibelungenplatz 1, 60318 Frankfurt
silber@fb2.fh-frankfurt.de
Begutachteter Beitrag/Reviewed paper
* Bei räumlichen Problemen gibt es grundsätzlich drei Normalspannungen (in drei zueinander orthogonalen Richtungen) S11, S22 und S33 sowie drei Scherspannungen (in drei zueinander orthogonalen Ebenen) S12, S13 und S23
** Wie vorstehend angemerkt gibt es im Raum insgesamt 6 Spannungen (je 3 Normal- und Scherspannungen). Bei der von MISES-Spannung handelt es sich um eine „Vergleichsspannung“ in Form einer einzigen Zahl, welche in bestimmter Weise aus den 6 Normal- und Scherspannungen S11, S22 und S33 und S12, S13 und S23 gebildet wird und insofern sehr oft als „Maß“ für die räumliche Lastsituation herangezogen wird, damit man nicht mühsam
6 Spannungen analysieren muss.
Silber G. Eine neue Methode in der präventiven Biomechanik – Biomechanische Formoptimierung von Liege- und Sitzoberflächen mit Menschmodellen. Orthopädie Technik, 2013; 64 (3): 48–53
- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Diesing P. Prüf- und Bewertungsmethoden für Antidekubitus-Systeme, Dissertation TU Berlin, 2006
- Natrup J. Druckmessung in der Dekubitusprophylaxe und ‑therapie, Orthopädie-Technik 2003; 54 (9), 628–634
- Silber G, Then C. Preventive Biomechanics – Optimizing Support Systems for the Human Body in the Lying and Sitting Position, Fachbuch, Springer, 2013
- Silber G, Vogl T, Then C. Methoden der präventiven Biomechanik: Dekubitus-Prävention, Praxis Ergotherapie 2010; (6)
- Then C, Vogl TJ, Silber G. Method for characterizing viscoelasticity of human gluteal tissue, Journal of Biomechanics, 2012
- Then C. Application of the Finite Element Method to Optimize Interaction of Human Soft Tissue and Soft Polymeric Foam Supports, Dissertation Goethe-Universität Frankfurt am Main, 2011
- Then C, Menger J, Vogl TJ, Hübner F, Silber G. Mechanical gluteal soft tissue material parameter validation under complex tissue loading, Technology and Health Care 2009; 17
- Then C, Menger J, Benderoth G, Alizadeh M, Vogl TJ, Hübner F, Silber G. A method for a mechanical characterization of human gluteal tissue, Tech Health Care 2007; 15: 385–398
- Then C, Menger J, Benderoth G, Alizadeh M, Vogl TJ, Hübner F, Silber G., Analysis of mechanical Interaction between human gluteal soft tissue and body supports, Tech Health Care 2007; 15: 1–16
- Vogl TJ, Then C, Naguib NN, Nour-Eldin NE, Larson M, Zangos S, Silber G. Mechanical Soft Tissue Property Validation in Tissue Engineering Using Magnetic Resonance Imaging: Experimental Research, Academic Radiology, 2010
- Bliss MR. Reviews in Clinical Gerontology, 1993
- Daniel RK. Archives of Physical Medicine and Rehabilitation, 1981
- Quintalle PR. Skin and Wound Care, 2006
- www.plasticsurgerynotes.net/Wounds
- Silber G, Then C. Preventive Biomechanics – Optimizing Support Systems for the Human Body in the Lying and Sitting Position, Fachbuch, Springer, 2013
- Then C. Application of the Finite Element Method to Optimize Interaction of Human Soft Tissue and Soft Polymeric Foam Supports, Dissertation Goethe-Universität Frankfurt am Main, 2011
