Einleitung
Die mechanische Festigkeit von prothetischen Versorgungen wird üblicherweise nach in ISO-Normen festgelegten Prüfverfahren und Anforderungen getestet. Diese stellen eine allgemeine Richtlinie für typischen menschlichen Gang dar. Jeder Mensch zeigt jedoch ein individuelles Gangbild, das zu einem individuellen Belastungsszenario führt. Auf der Finite-Elemente(FE)-Methode basierende Computersimulationen machen es möglich, im Voraus die Funktion und Belastbarkeit von Prothesen probandenspezifisch zu bestimmen.

Der Gang eines Beinamputierten wurde mit einem optischen Bewegungserfassungssystem der Firma Qualisys aufgezeichnet. Ein anthropometrischer virtueller menschlicher Dummy, der den Patienten repräsentiert, wurde mit einer Knöchel-Fuß-Prothese (bestehend aus Schaft und Knöchel-Fuß-Passteil) ausgestattet. Die Bewegungsdaten dienen als Randbedingungen, mit denen das Dummy-Prothesen-FE-Modell angetrieben wird. Die errechnete gangspezifische Spannungsverteilung in der Prothese gibt Aufschluss darüber, ob die Prothese für den Patienten geeignet ist.
Stand der Forschung
Die Methode der Finiten Elemente wird in der Prothetikentwicklung vor allem für die Auslegung und Optimierung des Prothesenschafts verwendet 1 2. Spannungsberechnungen an der Schnittstelle zwischen Prothesenschaft und Stumpf dienen der Quantifizierung des Tragekomforts.
Zwei Arbeiten, die sich mit FE-Festigkeitsanalysen von Prothesenbauteilen beschäftigen, sind Saunders 2003 3 und Bonnet 2012 4. Beide Studien kombinieren Ganganalyse, Simulation und mechanische Tests, um das mechanische Verhalten eines Prothesenfußes unter realistischen (d. h. physiologischen) Belastungsbedingungen vorherzusagen.
Kinematische und kinetische Parameter des Gangs eines Prothesenträgers wurden mittels optischen Trackings und Kraftmessplatten aufgezeichnet und als Randbedingungen an ein FE-Modell des Prothesenfußes übergeben. Das FE-Fußmodell wurde anhand von Herstellerangaben zu Geometrie und Material 5 bzw. anhand eines digitalen Scans und mit durch mechanische Tests ermittelten Materialeigenschaften erstellt 6.
Zur Validierung ihres FE-Fußmodells haben Bonnet et al. 7 zunächst das in ISO-Norm 10328 beschriebene Testverfahren in einer Prüfmaschine am realen Prothesenfuß und als Simulation am FE-Modell durchgeführt. Ein Vergleich der Kraft-Weg-Kurven zeigte eine weitgehende Übereinstimmung von Simulation und Messung. Erst anschließend wurde die Simulation mit den aufgezeichneten Bewegungsdaten durchgeführt.
In Saunders 2003 8 erfolgte die Validierung des Simulationsmodells erst nach der eigentlichen Simulation. In einem mechanischen Test wurden die Randbedingungen einer Prüfmaschine entsprechend den aufgezeichneten Bewegungsdaten eingestellt und die im Ganglabor und im mechanischen Test gemessenen Reaktionskräfte verglichen.
Methoden
Testperson war ein links unterschenkelamputierter Patient (30 Jahre alt, männlich, 80 kg, 1,80 m). Die Gangdaten wurden mit dem optischen Trackingsystem von Qualisys erhoben. Der Gang des Probanden wurde mit acht Infrarot-Kameras (eine davon im Video-Modus) aufgezeichnet. Zuvor war jedes der zu verfolgenden Körpersegmente mit mindestens drei reflektierenden Markern versehen worden. Die von Qualisys berechneten Trajektorien wurden geglättet, um als Randbedingungen einer FE-Simulation verwendet werden zu können. Das Menschmodell kann durch Skalierung an die anthropometrischen Maße (Größe und Gewicht) des Patienten angepasst werden. Nach Übertragung der aufgenommenen Bewegungsdaten auf den Dummy wurde eine FE-Simulation des Probandengangs durchgeführt.
Qualisys-Bewegungserfassung
14 passive reflektierende Marker wurden auf der Unterschenkelprothese des Probanden angebracht. Sieben Qualisys-Infrarot-Kameras wurden für das Tracking der optischen Marker verwendet, eine weitere zur Aufnahme eines Videos des Gangs.
Mit AMTI-Kraftmessplatten wurden die Bodenreaktionskräfte während des Gangs gemessen. Ein „sauberer” Treffer der Kraftmessplatte stellt eine erfolgreiche Wiederholung des Experiments dar. „Sauber” bedeutet, dass der ganze Fuß auf der Kraftmessplatte liegt, und zwar möglichst zentriert. Drei erfolgreiche Wiederholungen des Versuchs wurden durchgeführt.
Virtuelles Menschmodell
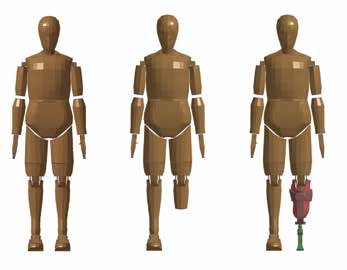
Ein stehender menschlicher 50-Perzentil-Dummy „LSTC Hybrid III” dient in der hier vorgestellten Arbeit als virtuelles Menschmodell (und wird im Folgenden nur als „Dummy” bezeichnet). Dieser Dummy hat kinematisch exakt definierte Gelenke. Größe und Gewicht des Dummys waren 1,70 m beziehungsweise 78 kg. Nachdem Größe und Gewicht von Dummy und Proband beinahe übereinstimmen, wurde keine Skalierung des Dummys vorgenommen. Der Dummy musste an die Anatomie des Probanden angepasst werden und wurde daher an derselben Stelle wie der Proband „amputiert”.
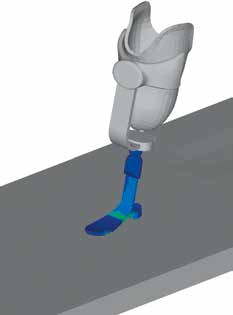
Bevor der Dummy mit den aufgenommenen Bewegungsdaten animiert werden konnte, musste die Prothese an den Stumpf des Dummys angepasst werden (Abb. 1). Mittels Singulärwertzerlegung wurde die Prothese automatisch ausgerichtet und dann auf dem Stumpf des Dummys platziert.
Der Dummy besteht aus mehr als 100 Segmenten. Nicht für alle standen Bewegungsdaten zur Verfügung. Fünf Segmente, auf die sich die Bewegungsdaten sinnvoll übertragen ließen, wurden identifiziert und animiert: die zwei Unterarme, der gesunde Unterschenkel, die Prothese und der Oberkörper.
Verarbeitung der Bewegungsdaten
Für jedes der oben genannten Segmente wurden mindestens drei entsprechende Marker identifiziert, mit deren Hilfe jeweils ein „starrer Körper” in Qualisys definiert wurde. Ausgehend von den getrackten Markerpositionen berechnet Qualisys für jeden definierten Starrkörper Bewegungspfade in Form dreidimensionaler Translationen und Rotationen.
Experimentell gewonnene Bewegungsdaten sind oft verrauscht und führen zu ruckartigen Bewegungen in der Simulation. Um dies zu verhindern, wurden die erfassten Daten geglättet, bevor sie als Randbedingungen in die Simulation eingehen.
Simulationsumgebung
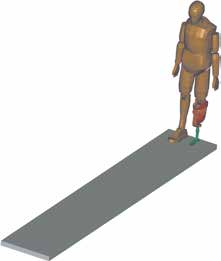
Der Dummy wurde auf einem Modell des Bodens platziert, das dem Versuchsaufbau entsprach (Abb. 2). Der Boden wurde als elastisches Material modelliert.
In der Simulation wurden die Bewegungsdaten auf den Dummy übertragen. Die aus der Simulation resultierende Verformung des Bodens diente als Grundlage für die Berechnung der Bodenreaktionskräfte.
Workflowsystem
Die Analyse des Spannungsverhaltens der Prothese während des Gehens wurde mit verschiedenen Software-Tools durchgeführt. Für die Bewegungsmessung wurde das optische Tracking-System Qualisys verwendet. Die Verarbeitung der gemessenen Bewegungen sowie die Erstellung des Inputfiles für die Simulationssoftware (LSDYNA) erfolgte mit der Programmiersprache Python. Die Ergebnisse wurden mit CMGUI visualisiert und über einen Webbrowser zugänglich gemacht.
Zur Vereinfachung sich wiederholender, zeit- und arbeitsintensiver Vorgänge der Datenverarbeitung wurde ein Workflowsystem in C++ implementiert, das es ermöglicht, die erforderlichen Arbeitsschritte nacheinander automatisch auszuführen.
Ergebnisse
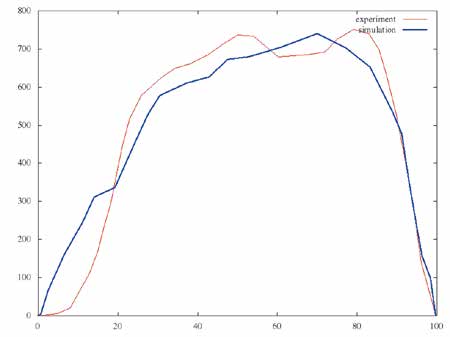
Die Simulation des Patientengangs am Dummy, der mit den im Experiment gemessenen Bewegungen gesteuert wurde, ermöglichte eine Analyse der während des Gehens in der Prothese auftretenden Spannungen und der am Boden auftretenden Reaktionskräfte (Abb. 3). Die aus der Simulation resultierenden und die experimentell gewonnenen Bodenreaktionskräfte wurden miteinander verglichen.
Diskussion
Die für die Gangdynamik entscheidenden anthropometrischen Parameter sind Größe und Gewicht. Da die Testperson ähnlich groß und schwer war wie der Dummy, wurde keine Skalierung des Dummys vorgenommen. Wenn sich jedoch die anthropometrischen Maße des Patienten stark von denen des Dummys unterscheiden, muss der Dummy entsprechend skaliert werden.
Die Innenfläche des Prothesenschafts und die Oberflächengeometrie des Dummy-Stumpfes stimmen nicht überein. Dies ist zu erwarten und stellt keine Einschränkung des Modells dar. Für die FE-Spannungsanalyse sind lediglich die Lasten entscheidend, die vom Dummy auf die Prothese übertragen werden. Diese Lastübertragung wurde in der Simulation realisiert, indem der Stumpf des Dummys und der Prothesenschaft fest miteinander verbunden wurden.
Abbildung 4 zeigt eine Abweichung zwischen gemessenen und simulierten Bodenreaktionskräften. Diese Abweichung lässt sich auf zwei anzugehende Faktoren zurückführen:
- Hauptursache der festgestellten Abweichung ist die Elastizität des Bodens. Die Materialeigenschaften, die dem Boden zugewiesen werden, sollten die gemessenen Bodenreaktionskräfte ungefähr reproduzieren können.
- Zweitwichtigster Faktor ist der Effekt des „Center of Pressure (CoP)”. Kraftmessplatten bestimmen die Bodenreaktionskräfte an bestimmten Punkten entlang der Kraftmessplatte, die „CoP points” genannt werden. Diese Punkte, an denen der eigentliche Kontakt mit dem Boden stattfindet, sollten experimentell ermittelt und die während der Simulation an diesen Punkten auftretenden Reaktionskräfte gemessen werden.
Schlussfolgerung
Eine wichtige Aufgabe, mit der man sich in Zukunft wird befassen müssen, ist die Optimierung des Bodenkontakts für eine realistische Simulation der Bodenreaktionskräfte. Dieser Optimierungsprozess muss möglicherweise für jedes Experiment einzeln vorgenommen werden.
Der Kontaktdruck zwischen Stumpf und Schaft bestimmt maßgeblich den Tragekomfort der Prothese. In der Literatur werden mehrere Studien zur Untersuchung der Stumpf-Schaft-Schnittstelle beschrieben. Nur wenige berücksichtigen jedoch die durch das Gehen hervorgerufenen dynamischen Effekte bei der Analyse des Schafts. Indem der Stumpf des Dummys durch ein Modell des echten Patientenstumpfes ersetzt wird (basierend auf einem CT-Scan und in der Literatur genannten Materialeigenschaften menschlichen Gewebes), könnten solche Effekte wirksam untersucht werden.
Differenziertere anthropometrische Maße könnten für die Modellierung des Dummys verwendet werden, damit dieser der Testperson möglichst genau entspricht. Denkbar ist auch die Verwendung eines detaillierteren Menschmodells wie beispielsweise THUMS (Total Human Model for Safety), die jedoch aufgrund der Komplexität des Modells und der erforderlichen Rechenressourcen schwierig sein könnte.
Danksagung
Die Autoren danken dem Förderprogramm „Fraunhofer Attract” für die Finanzierung dieser Arbeit.
Für die Autoren:
Ellankavi Ramasamy M. Sc.
Fraunhofer IPA
Nobelstr. 12
70569 Stuttgart
Ellankavi.ramasamy@ipa.fraunhofer.de
Begutachteter Beitrag/reviewed paper
Ramasamy E, Dorow B, Schneider U, Röhrle O. Dynamische Belastung von Prothesen während des Gehens – Berechnung mit Hilfe eines virtuellen Menschmodells. Orthopädie Technik, 2015; 66 (3): 24–27
- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Sengeh DM, Herr H. A Variable-Impedance Prosthetic Socket for a Transtibial Amputee Designed from Magnetic Resonance Imaging Data. Journal of Prosthetics and Orthotics, 2013; 25: 129–137
- Portnoy S, Yarnitzky G, Yizhar Z, Kristal A, Oppenheim U, Siev-Ner I. Real-Time Patient-Specific Finite Element Analysis of Internal Stresses in the Soft Tissues of a Residual Limb: A New Tool for Prosthetic Fitting. Annals of Biomedical Engineering, 2007; 35 (1): 120–135
- Saunders MM, Schwentker EP, Kay DB, Bennett G, Jacobs CR, Verstraete MC. Finite Element Analysis as a Tool for Parametric Prosthetic Foot Design and Evaluation. Technique Development in the Solid Ankle Cushioned Heel (SACH) Foot. Computer Methods in Biomechanics and Biomedical Engineering, 2003; 6 (1): 75–87
- Bonnet X, Pillet H, Fode P, Lavaste F, Skalli W. Finite element modelling of an energy-storing prosthetic foot during the stance phase of transtibial amputee gait. Journal of Engineering in Medicine, 2012; 226 (1): 70–75
- Saunders MM, Schwentker EP, Kay DB, Bennett G, Jacobs CR, Verstraete MC. Finite Element Analysis as a Tool for Parametric Prosthetic Foot Design and Evaluation. Technique Development in the Solid Ankle Cushioned Heel (SACH) Foot. Computer Methods in Biomechanics and Biomedical Engineering, 2003; 6 (1): 75–87
- Bonnet X, Pillet H, Fode P, Lavaste F, Skalli W. Finite element modelling of an energy-storing prosthetic foot during the stance phase of transtibial amputee gait. Journal of Engineering in Medicine, 2012; 226 (1): 70–75
- Bonnet X, Pillet H, Fode P, Lavaste F, Skalli W. Finite element modelling of an energy-storing prosthetic foot during the stance phase of transtibial amputee gait. Journal of Engineering in Medicine, 2012; 226 (1): 70–75
- Saunders MM, Schwentker EP, Kay DB, Bennett G, Jacobs CR, Verstraete MC. Finite Element Analysis as a Tool for Parametric Prosthetic Foot Design and Evaluation. Technique Development in the Solid Ankle Cushioned Heel (SACH) Foot. Computer Methods in Biomechanics and Biomedical Engineering, 2003; 6 (1): 75–87
