L. Pötz, J. Ditsche
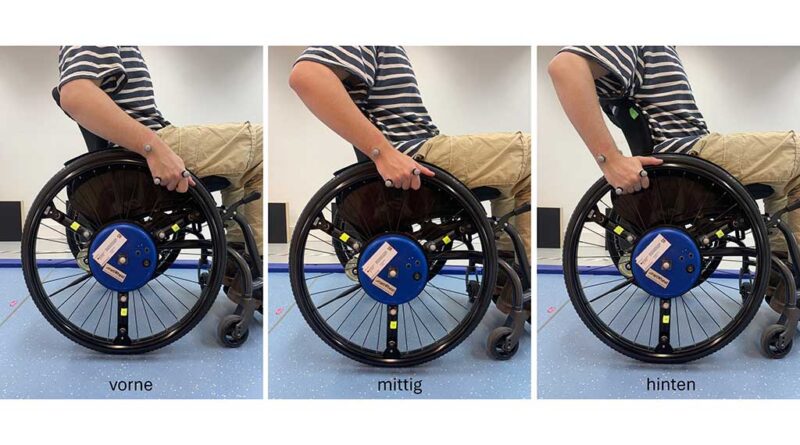
In dieser Thesis wird der Einfluss von drei verschiedenen Greifpositionen auf die Kräfteverteilung beim manuellen Rollstuhlantrieb untersucht. Rollstuhlfahrer:innen klagen über starke Schulterbeschwerden, welche auf die Ineffizienz des manuellen Vortriebs zurückzuführen sind. In einer Vorstudie mit einer Teilnehmerin werden zwei Methoden zur Berechnung des Kraftangriffspunktes am Greifring unter statischen Bedingungen verglichen. In der Hauptstudie fahren gesunde Teilnehmer:innen (n = 8) und Alltagsrollstuhlfahrer:innen (n = 2) in einem instrumentierten Rollstuhl auf einer ebenen Strecke. Die auf den Greifring wirkenden Kräfte und Drehmomente werden mit dem SmartWheel aufgezeichnet. Der Kraftangriffspunkt wird kinematisch mithilfe eines 3D-Bewegungsanalysesystems bestimmt. Die Datenauswertung geschieht über eine eigens entwickelte Programmierroutine. Bezüglich der Kräfteverteilung konnten Unterschiede zwischen den Greifpositionen und den zwei Gruppen gefunden werden. Auch die Fahrgeschwindigkeiten, die Effizienz und erbrachte Leistung unterschieden sich zwischen den Greifpositionen und den zwei Gruppen. Zusammenfassend bestätigt diese Thesis den Einfluss der Greifposition beim manuellen Rollstuhlantrieb. Die entwickelte Messmethodik sowie die Auswerteroutine sollen daher als Grundlage für zukünftige Forschung in diesem Themengebiet dienen. Weiterführend soll es im orthopädietechnischen Betrieb möglich sein, durch eine Analyse des Rollstuhlvortriebs individuelle Empfehlungen geben zu können.
- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026