Einleitung
Die Analyse des Stehens und Gehens eines Amputierten setzt das Wissen über den „normalen” Stand und Gang des Menschen voraus. Doch wie sieht er nun aus, der normale Gang? Die Literatur hält zahlreiche Veröffentlichungen zum Thema bereit; die Antwort, welche Informationen daraus zu einer Bewertung hilfreich sind, ist differenziert. Menschen gehen unterschiedlich: Kinder anders als Erwachsene, Männer anders als Frauen, Größere anders als Kleinere. Selbst Stimmungsschwankungen wie Depressionen oder Glücksgefühle können sich durch Veränderung in der Körperhaltung auf das Gangbild auswirken.
Statik und Dynamik
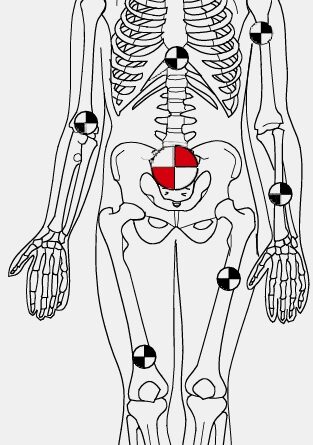
Die Statik ist der Definition nach das Teilgebiet der Mechanik, das sich mit dem Gleichgewicht von Kräften an nicht beschleunigten Körpern befasst. Der aufrechte Stand ist möglich, da die von den unteren Extremitäten und dem Becken gebildete mehrgliedrige Gelenkkette durch innere Kräfte des Muskel- und Bandapparates gegen die Wirkung der Schwerkraft (äußere Kräfte) stabilisiert wird. Ziel ist, die senkrechte Projektion des Gesamt-Körperschwerpunktes (KSP) auf den Boden innerhalb der Boden-Unterstützungsfläche der Füße zu halten (Abb. 1).
Die Dynamik ist das Teilgebiet der Mechanik, das sich mit der Wirkung von Kräften befasst. Sie wird innerhalb der technischen Mechanik weiter untergliedert in die Statik und in die Kinetik, die den Zusammenhang zwischen Bewegungen und Kräften erfasst.
Gehen ist ein dynamischer Vorgang. Dieser besteht darin, den Körperschwerpunkt aus der Gleichgewichtslage des Standes heraus in eine bestimmte Grundrichtung zu beschleunigen und ihn dabei mit den unteren Extremitäten abwechselnd auf jeder Seite so zu unterstützen, dass die vorgegebene Grundrichtung und die in dieser Richtung vorgesehene Bewegungsgeschwindigkeit eingehalten werden.
Da der menschliche Gang aus einer komplizierten, sehr schnellen Folge von Einzelbewegungen und Muskelaktionen mit entsprechend feinster Koordination besteht, empfiehlt es sich, den Gehvorgang aufzugliedern und unter verschiedenen Gesichtspunkten zu betrachten. Es gibt zwei grundsätzliche Möglichkeiten: die kinematische und die kinetische Analyse. Bei der kinematischen Betrachtung des Gehens werden die Bewegungen in ihrer Größenordnung (Winkelausschläge) oder nach ihrer Art (Flexion, Extension oder Rotation) beurteilt bzw. beschrieben. Die kinetische Analyse dagegen beschäftigt sich mit den Kräften, die diese Bewegungen auslösen. Untersuchungen dazu erfordern allerdings ein Ganglabor.
Die zum Gehen notwendigen Bedingungen sind vielschichtig. Sie können sich nach Goetz-Neumann 1 auf die notwendigen physischen und psychischen Voraussetzungen beziehen. Ein harmonisches Gangbild benötigt eine gute Energieversorgung der Muskeln, gesunde Gelenke, ein funktionierendes neuromuskuläres System und eine Haltungs- und Gleichgewichtskontrolle. Das alles aber ist zu wenig, wenn dem Amputierten die Motivation fehlt, das Gehen mit einem Hilfsmittel neu zu erlernen. Auch die Umgebungsfaktoren spielen bei der Bewertung eine konkrete Rolle, z. B. die Beschaffenheit des Untergrundes (harter/weicher Boden) oder die des Schuhwerkes (Steifigkeit, Absatzhöhe, Spitzenhub, Abrollebene).
Stabilisierung der Extremität in der Sagittal- und in der Frontalebene
Zur Stabilisierung des Beines in der Sagittal- und Frontalebene können sowohl passive als auch aktive Sicherungen benannt werden. Passive Sicherungen sind Bandhemmungen, die Gelenke vor Überstreckung schützen. Das Hüftgelenk wird in der Sagittalebene durch eine „Bänderschraube” (Ligg. ilio‑, ischio- und pubofemorale) gesichert, die bei Streckung des Beines den Hüftkopf gleichzeitig weiter in die Pfanne zieht.
Die Kreuzbänder (Ligg. cruciatum anterior/posterior) bewahren das Kniegelenk vor Hyperextension. Auch das obere Sprunggelenk hat passive Sicherungen. Diese werden allerdings erst bei größeren Winkelausschlägen im Sinne einer Plantar- und Dorsalflexion wirksam und haben für den Stand wenig Bedeutung.
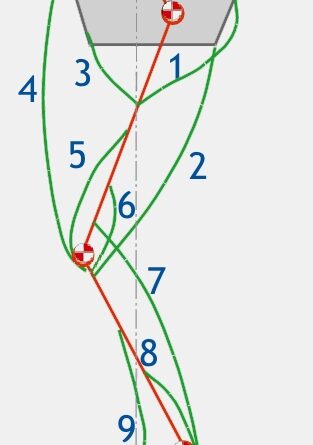
Da eine rein passive Gelenksicherung nicht möglich ist, ist eine weitere, aktive Sicherung der Extremität durch die Muskulatur notwendig. Die für die Bewegungen in der Sagittalebene in Betracht kommenden Muskelgruppen sind in dem Schema der Abbildung 2 dargestellt.
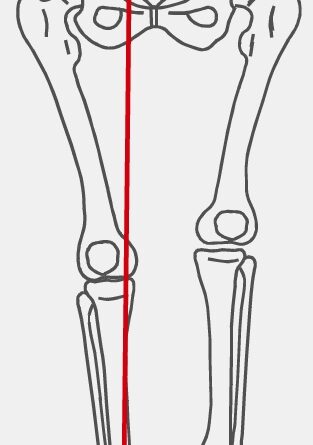
Die aktive Sicherung des Stützapparates in der Frontalebene geschieht außer durch die Pro- und Supinatoren des Fußes und die Seitenbänder im Kniegelenk vornehmlich durch die Abduktoren der Hüfte (Mm. glutaeus medius und minimus). Durch die seitliche Verspannung von Becken und Oberschenkelknochen stabilisieren diese das Becken in der Waagerechten und lassen eine lateralisierende Bewegung zu, bis sich der Körperschwerpunkt über der Standfläche der Belastungsseite befindet (Abb. 3).
Für einen oberschenkelamputierten Patienten ist diese Sicherung nur ungleichwertig umzusetzen, da durch den Verlust der Extremität die genannten Sicherungsmechanismen fehlen. Der Schaft benötigt daher eine laterale Anlage für die femorale Abstützung, um die auftretenden Kräfte zum Boden übertragen zu können, und weiterhin eine Sitzbeinumgreifung zur Erstellung eines Dreipunktsystems.
Bewegungen des Beckens beim Gehen
Die während des Gehens auftretenden Bewegungen des Beckens lassen sich in drei verschiedene Einzelbewegungen aufgliedern:
- die seitliche Becken-Absenkung
- die Seitverlagerung des Körperschwerpunktes
- die Beckenrotation
Seitliche Becken-Absenkung
Während des Gehens fällt das Becken von der jeweils unterstützten Seite zur Seite des Schwungbeines hin bis zu etwa 4 bis 7° und kippt leicht nach vorn ab. Hierdurch wird die Vertikalbewegung des Körperschwerpunktes annähernd um die Hälfte reduziert. Das Ziel ist die Verhinderung einer zu großen Anhebung des KSP und die Ermöglichung des freien Durchschwungs der Extremität.
Seitverlagerung des Körperschwerpunktes
Beim Gehen muss das Körpergewicht abwechselnd vom rechten und linken Bein getragen werden. Die hierbei notwendige Aufrechterhaltung des Gleichgewichts ist selbst unter Ausnutzung der Trägheitskräfte der in Gangrichtung bewegten Körpermasse nur dann möglich, wenn der Körperschwerpunkt abwechselnd zur einen oder anderen Seite verlagert wird. Die Größe der Verlagerung ist abhängig von der Gehgeschwindigkeit. Ziel ist, den Schwerpunkt im Einbeinstand über die Unterstützungsfläche zu bringen.
Die Beckenrotation
Die Beckenrotation erfolgt um die vertikale Beinachse und beträgt etwa 4° zu jeder Seite. Auf den Gehvorgang bezogen bewirkt sie eine Vorverlagerung des Hüftgelenkes der Schwungbeinseite und ermöglicht so eine Vergrößerung der Schrittlänge.
Schrittzyklus
Um das Gangbild des Menschen präziser zu beschreiben, ist es sinnvoll, den Schrittzyklus zunächst auf die Betrachtung eines „Doppelschrittes” zu reduzieren. Der Definition nach beginnt ein Doppelschritt mit dem Fersenkontakt eines Beines und endet mit dem darauffolgenden Fersenkontakt desselben Beines. Somit beinhaltet der Doppelschritt die Stand- und die Schwungphasenzeit einer Extremität. Die Standphase zählt dementsprechend vom Fersenkontakt des Beines bis zu dessen Zehenablösung und nimmt etwa 60 % der Doppelschrittdauer in Anspruch.
An die Standphase schließt sich die Schwungphase an. Diese Phase wird vom Zeitpunkt der Zehenablösung bis zum erneuten Fersenkontakt gerechnet und füllt die restlichen 40 % des Doppelschrittes aus.
Stand- und Schwungphase lassen sich noch weiter unterteilen: Jeder Doppelschritt enthält einen Moment, in dem beide Füße den Boden berühren, und zwar zwischen dem Ende der einen und dem Beginn der anderen Standphasenseite. Jede Doppelunterstützung beträgt beim normalen Gehen etwa 10 % der Doppelschrittzeit und verkürzt sich mit zunehmender Gehgeschwindigkeit.
Nach Perry 2 wird der Gangzyklus in 8 Phasen unterteilt.
Die Standphase beginnt mit der Gewichtsübernahme
- Anfangskontakt (initial contact)
- Belastungsübernahme (loading response)
Daran schließen sich die Phasen der Einbein-Unterstützung an
- Mittlere Standphase (mid stance)
- Standphasenende (terminal stance)
- Schwungphasenvorbereitung (preswing)
In der Schwungphase beginnt die Vorwärtsbewegung der Extremität
- Schwungphasenbeginn (initial swing)
- Mittlere Schwungphase (mid swing)
- Schwungphasenende (terminal swing)
Weitere Faktoren, die den Schrittzyklus beeinflussen können, sind die Schrittlänge, die Schrittweite und der Fußaufsetzwinkel. Nach Untersuchungen von Murray 3 beträgt die Schrittlänge des Einzelschrittes ca. 65 cm, die des Doppelschrittes ca. 155 cm. Die Schrittweite gibt die Breite der Gangspur an. Diese beträgt ca. 8 cm, weist jedoch starke Streuungen auf. Der Fußaufsetzwinkel ist der Winkel, den die Fußlängsachse zur Gangrichtung bildet, er wird mit etwa 7° angegeben. All diese Angaben sind Durchschnittswerte bei einem gesunden Erwachsenen in Abhängigkeit von Alter, Größe und Gehgeschwindigkeit.
Aufbaukriterien
Die Positionierung der Prothese zum Körper hat einen wesentlichen Einfluss auf den Stand und Gang des Amputierten. Die Grundposition im statischen Prothesenaufbau wird zunächst mit Nutzung von Lotlinien oder Aufbaulinien zur Orientierung durchgeführt.
Schon frühe Analysen von Schede oder Braune/Fischer 4 berichten über die „Haltung” des Menschen als Grundlage zur Ermittlung von Aufbaulinien. Aus diesen Untersuchungen lassen sich die Grundwerte zum statischen Prothesenaufbau ableiten: Die frontale Aufbaulinie verläuft durch die Mitte aller Gelenke, die sagittale aus der Mitte des Hüftgelenkes, vor dem Kniedrehpunkt und 4 bis 8 cm vor dem Knöchelgelenk (Linie nach Mikulicz).
Für die Einordnung eines Kniepassteils in der Frontalebene bedeutet das zunächst die mittige Einstellung; später in der dynamischen Anprobe kann das Gelenk lateralisiert werden. In der Sagittalebene liegt die mechanische Achse des monozentrischen Gelenkes ca. 20 mm oberhalb des tastbaren Gelenkspaltes der kontralateralen Seite und damit mindestens in Höhe des physiologischen Gelenkdrehpunktes. Bei polyzentrischen Gelenkskonstruktionen wird die vordere, obere Achse als Referenzachse für den statischen Werkstattaufbau verwendet (wenn nicht anders angegeben) und eventuell in der dynamischen Anprobe in ihrer Aufbauhöhe nach kosmetischen Merkmalen (z. B. Sitzhöhe) verändert.
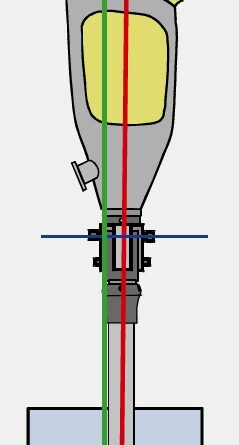
Diese Linien sind allerdings nicht identisch mit dem Vektor, der bei Belastung des Beines auf einer Kraftmessplatte sichtbar wird. Dieser Vektor entsteht aus dem gefundenen Kompromiss, der sich aus der statischen und dynamischen Anprobe ergibt; als Definition dieser Linie kann „die Verbindungslinie vom momentanen Körperschwerpunkt zum Mittelpunkt der Krafteinleitung” angegeben werden (Abb. 4). Untersuchungen von Blumentritt 5 6 mit dem L.A.S.A.R.-Posture haben eine Optimierung der Aufbaugrundwerte ergeben. Der Amputierte erhält größtmögliche Sicherheit auf der einen bei gleichzeitiger zweckgerechter Einleitung der Schwungphase auf der anderen Seite.
Die Wiederherstellung der Boden-Unterstützungsfläche ist eine der zentralen Aufgaben, die eine Prothese erfüllen muss. Diese Anforderung ist eines der wesentlichen Kriterien zur Auswahl des geeigneten Prothesenfußes. Zahlreiche historische Veröffentlichungen lassen erkennen, dass ein Stelzbein die genannte Zielsetzung nicht ausreichend erfüllen und heutigen Ansprüchen in keiner Weise mehr gerecht werden kann. Schon die Amputation im Fußbereich reduziert die Standfläche, der Amputierte bekommt zwangsläufig Schwierigkeiten, das Gleichgewicht zu halten. Prothesenfüße können aufgrund der benötigten Elastizität auf der einen und der festen Kontaktflächen zum Boden auf der anderen Seite diese Flächenverkleinerung nur zum Teil kompensieren.
Für die dynamischen Eigenschaften eines Prothesenfußes und damit auch für das zu erwartende Gangbild des Amputierten sind neben den Konstruktionsmerkmalen vor allem die einzustellenden Längenverhältnisse des Vor- und Rückfußhebels von großer Bedeutung. Beide Hebel sind in ihrem Verhältnis direkt voneinander abhängig. Ein zu kurz eingestellter Vorfußhebel einer Oberschenkelprothese lässt das Becken zum Ende der Standphase abkippen; das Kniegelenk wird unsicher, der Schritt ist verkürzt.
Schlussfolgerung
Das Erkennen von Gehfehlern bei Oberschenkelamputierten und das Vornehmen korrigierender Maßnahmen erfordert Erfahrung, daher ist das Wissen zur Biomechanik des menschlichen Gehens mit allen Abweichungen und Besonderheiten eine der Kernkompetenzen des Versorgungsteams. Das Ziel einer Gehschulung muss sein, das Gangbild des Patienten möglichst exakt an die Abläufe der physiologischen Gangphasen anzunähern.
Für den Orthopädie-Techniker bedeutet die Umsetzung dieser Anforderung eine Anfertigung des Prothesenschaftes unter größtmöglicher Sorgfalt und Genauigkeit. Der Anspruch ist eine optimale Bettung des Stumpfes unter Aufnahme des gesamten Stumpfvolumens sowie eine gleichmäßige Druckverteilung im Vollkontakt unter maximal möglicher Endbelastung.
Die Stellung des Stumpfes im Raum ist im Aufbau der Prothese zu integrieren; der kurze Oberschenkelstumpf kann aufgrund ungleichmäßigen Muskelzuges in die Fehlstellung der Außenrotation, der Abduktion und der Flexion abwandern. Unter diesen Voraussetzungen ist ein zielgerichteter Aufbau zum Erreichen eines annähernd physiologischen Gangbildes deutlich differenzierter und erfordert eine ständige Begutachtung von Passform, Statik und Funktion.
Diese Untersuchungen sind sinnvoll nur im interdisziplinären Team zu leisten. Nicht zuletzt Peters 7 beschreibt in seiner Arbeit den Wunsch nach einer Einführung gesonderter Prothesensprechstunden. Darin könnten in Zusammenarbeit von Arzt, Physiotherapeut und Orthopädie-Techniker Versorgungsverläufe kontrolliert und notwendige Änderungen diskutiert, durchgeführt und dokumentiert werden.
Die Autoren:
Bernd Sibbel
Detlef Kokegei
Bundesfachschule für Orthopädie-Technik Dortmund
Schliepstraße 6–8
44135 Dortmund
B.Sibbel@ot-bufa.de
Begutachteter Beitrag/Reviewed paper
Sibbel B, Kokegei D. Biomechanik des physiologischen Schrittzyklus. Orthopädie Technik, 2014; 65 (6): 40–43
- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Götz-Neumann K. Gehen verstehen. Ganganalyse in der Physiotherapie. Stuttgart/New York: Georg Thieme Verlag, 2003
- Perry J. Gait Analysis – Normal and Pathological Function. Thorofare, NJ: Slack Inc., 1992
- Murray M, Mollinger L, Sepic S. Kinematic and EMG Patterns during slow, free, and fast walking. J Orthopaedic Research, 1984; 2: 272–280
- Braune W, Fischer O. The Human Gait (Übersetzung von P. Maquet und R. Furlong), Berlin: Springer-Verlag, 1987
- Blumentritt S. Biomechanische Aspekte zur Indikation von Prothesenkniegelenken. Orthopädie Technik, 2004; 55 (6): 508–521
- Blumentritt S, Bellmann M, Ludwigs E, Schmalz T. Zur Biomechanik des mikroprozessorgesteuerten Prothesenkniegelenks Genium. Orthopädie Technik, 2012; 63 (1): 24–35
- Peters A, Krumrey L. Ursachen und Korrektur von Prothesengangfehlern bei Oberschenkelpatienten. Stuttgart/New York: Georg Thieme Verlag, 2003. Die Rehabilitation, 2000; 39: 223–230
