Einleitung
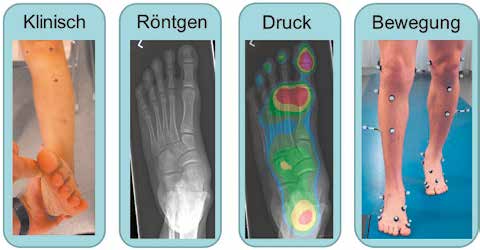
Während des Gehens hat der Fuß die Aufgabe, beim initialen Bodenkontakt den Aufprall zu dämpfen und sich danach in der Standphase an Unebenheiten des Bodens anzupassen, um eine sichere Auflagefläche zu gewährleisten. Beim nachfolgenden Abdruck sollte der Fuß einen steifen Hebel bilden, um die Kraft der Wadenmuskulatur effektiv zum Vortrieb zu nutzen 1. Sind diese Funktionen gestört, klagt der Patient häufig über Symptome wie rasche Ermüdung des Fußes, Schmerzen und Einschränkungen bei der Sportausübung. Zur Diagnostik der Fußfunktion für eine zielgerichtete Planung der Therapie mit Einlagen, Orthesen oder operativen Eingriffen haben sich Fußmodelle etabliert 2. Fußmodelle sind biomechanische Computermodelle zur Berechnung von Gelenkbewegungen im Fuß, basierend auf Kameraaufnahmen der Bewegung. Ein Fußmodell steht hierbei nicht alleine; es wird als sinnvolle Ergänzung der manuellen Tests von Beweglichkeit und Kraft, des Röntgenbildes und der dynamischen Druckverteilungsmessung angesehen, die in ihrer Zusammenschau bewertet werden (Abb. 1). Die Vorteile eines Fußmodells gegenüber den anderen drei Messmethoden liegen auf der Hand: Bei der Bewegung wirken oft höhere Kräfte, als der Untersucher im manuellen klinischen Test aufbringen kann. Im Gegensatz zum statischen Röntgenbild bildet eine dynamische Messung die Fehlstellungen bei Bewegung und deren muskuläre Kompensationen besser ab. Gegenüber der zweidimensionalen Druckverteilungsmessung stellt sie eine dreidimensionale Messung der komplexen mehrdimensionalen Fußbewegung dar.

Technische Voraussetzungen
Entstanden sind Fußmodelle als Erweiterung der Ganzkörpermodelle, die bei der kamerabasierten instrumentellen dreidimensionalen Ganganalyse seit vielen Jahren in der Klinik angewendet werden 3. Durch technische Verbesserungen der Auflösung der Kamerasysteme in den letzten Jahren wurde es möglich, eine Vielzahl reflektierender Kugeln (im Folgenden als Marker bezeichnet) am Fuß zu erfassen (siehe Abb. 1). Dadurch konnte der Fuß, der bisher nur aus einem Segment bestand, in mehrere Segmente unterteilt werden. Als technische Voraussetzungen werden mindestens 8 Hochgeschwindigkeitskameras mit einer zeitlichen und räumlichen Auflösung von 200 Hz und 1,3 Megapixeln bei einem fokalen Volumen von 2 × 2 × 3 m empfohlen. Mehr Kameras mit höherer Auflösung erleichtern die Aufnahme, insbesondere wenn bei stark deformierten Füßen und großen Schritten oder beim Rennen eine aufwendige manuelle Nachbearbeitung beim Tracking der Marker in der Software notwendig wird. Gegenüber dem Ganzkörpermodell werden bei Fußmodellen zusätzliche Marker am Fuß und am Unterschenkel benötigt. Durch das Palpieren und die vermehrte Anzahl von Markern verlängert sich die Zeit für die Markerausstattung gegenüber dem Ganzkörpermodell.
Die in der Klinik am häufigsten eingesetzten Modelle sind das Milwaukee- und das Oxford-Fußmodell, die den Fuß in Rückfuß, Vorfuß und Hallux unterteilen 4. Neben einer Vielzahl von Markern, die an standardisierten anatomischen Referenzpunkten aufgebracht werden, benötigt das Milwaukee-Fußmodell noch eine axiale Röntgenaufnahme des Calcaneus (Saltzmann-Aufnahme) zur Bestimmung der Rückfußeversion. Da Röntgenaufnahmen in den meisten Fällen nur sagittal und anterior-posterior vorliegen, stellt dies eine zusätzliche Strahlenbelastung dar. Im Allgemeinen sollte es nach Meinung der Autoren auch möglich sein, Fußmodelle ohne Röntgenanalyse anzuwenden, sodass sich die folgenden Ausführungen auf das Oxford-Fußmodell (OFM) 5 beschränken, das keine zusätzlichen Röntgenaufnahmen zur Eingabe voraussetzt.
Beispiel der dreidimensionalen Fußbewegung
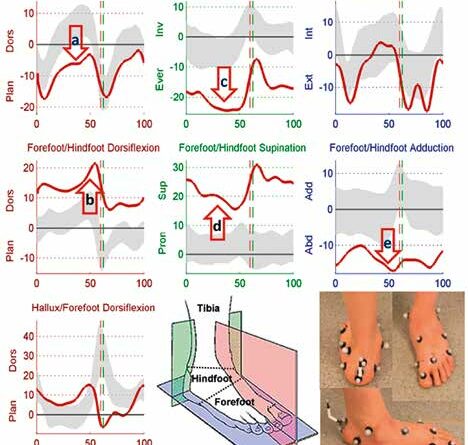
Welche diagnostische Information über die Bewegung liefert das OFM dem Betrachter? Aus den Bewegungen der Marker werden im OFM Gelenkwinkel zwischen Tibia und Rückfuß sowie zwischen Rückfuß und Vorfuß in allen drei Bewegungsebenen (sagittal, frontal und transversal) berechnet. Die Bewegung des Hallux zum Vorfuß wird nur in der Sagittalebene (Extension und Flexion) angegeben. Um die klinische Bedeutung der einzelnen Ebenen an einem Beispiel zu veranschaulichen, ist in Abbildung 2 ein jugendlicher Patient mit ausgeprägtem Knickplattfuß zum Vergleich einem Kollektiv von Jugendlichen mit normal entwickelter Fußform gegenübergestellt. Die typischen fünf Komponenten des Knickplattfußes, wie sie in der Literatur beschrieben werden 6, sind bei diesem Patienten enthalten und in Abbildung 2 mit den Buchstaben a – e gekennzeichnet: In der Sagittalebene besteht eine Spitzfußstellung (a) und eine dorsale Aufbiegung des Mittelfußes (b). In der Frontalebene besteht eine starke Eversion des Rückfußes © mit einer Supination im Vorfuß (d). In der Transversalebene ist die Vorfußabduktion erhöht (e).
Da bei diesem Patienten erhebliche Abweichungen von der natürlichen Streuung der Norm gemessen wurden, reicht eine Einlage zur Korrektur nicht aus. Der manuelle klinische Test zeigte eine gute Fußbeweglichkeit, sodass mittels einer Talus-Repositionsorthese 7 der Talus wieder über den Calcaneus positioniert werden kann und somit die Eversion im Rückfuß reduziert, das Fußgewölbe aufgerichtet und gleichzeitig die Abduktion verringert wird. Bei flexiblem Mittelfuß wird die deutlich vorhandene Supination von ca. 20° im Vorfuß (d) mittels Orthese vollständig korrigiert, da diese Verwringung zum Rückfuß eine Adaptation an die im Rückfuß gemessene Eversion von ca. 20° darstellt, um den Vorfuß beim Gehen vollständig plantar auf den Boden zu bringen. Die Spitzfußstellung im oberen Sprunggelenk müsste zusätzlich gedehnt werden, um die Biegebelastung auf den Mittelfuß zu reduzieren. Gegebenenfalls kann die Biegebelastung zusätzlich durch eine steife Sohle geschützt werden. Mit einer steifen Sohle könnte auch ein besserer Fußhebel für einen guten Abdruck beim Gehen bewirkt werden. Insgesamt wäre bei der ausgeprägten Fehlstellung mittelfristig ein operativer Eingriff abzuwägen, insbesondere wenn der Fuß im klinischen Test nicht flexibel ist.
Neben der dreidimensionalen Fußbewegung kann auch die Mittelfußbelastung in der Abduckphase über das resultierende Drehmoment zwischen Vor- und Rückfuß abgeschätzt werden 8. Eine gegenüber der Normerhöhte Mittelfußbelastung kann zur biomechanischen Erklärung bestehender Schmerzen im Mittelfußbereich dienen. In diesem Fall könnte mit Schuhzurichtungen und Einlagen die Biegebelastung reduziert werden, um die Schmerzen zu verringern.
Reliabilität der Fußmodellmessung
Bei der vorangehenden Betrachtung in Abbildung 2 wurden die Abweichungen der Fußmodellkurven eines Patienten von der Norm als Grundlage zur Therapieentscheidung herangezogen. Dies stellt das typische Vorgehen bei der instrumentellen Ganganalyse dar 9. Hierbei stellt sich natürlich die Frage, wie reliabel die Messwerte sind und welche Auswirkungen Positionierungsfehler der Marker auf die Bestimmung der Winkel im OFM haben. Die Wiederholbarkeit des OFM beträgt zwischen 2 und 8° für die berechneten Maximalwerte und ist deutlich besser (2 bis 3°) für berechnete Bewegungsausmaße 10 11. Die größte Wiederhobarkeit besteht in der Sagittalebene, wohingegen die Transversalebene die geringste Wiederholbarkeit aufweist 12 13. Es spielt weiterhin keine Rolle hinsichtlich der Reliabilität, ob Maximalwerte in der Stand oder Schwungphase angeschaut werden 14.
Neben der guten Wiederholbarkeit, die eine entscheidende Voraussetzung für die klinische Anwendung darstellt, führen Positionierungsfehler der Marker und des Patienten meistens zu einem deutlichen Offset der Fußmodellkurven. Das ist auch der Grund, warum diskrete Maximalwerte größere Fehler aufweisen als das berechnete Bewegungsausmaß (Max–Min), auf das ein Offset weniger Einfluss hat 15. Eine Normalisierung auf Neutralstellung im aufrechten Stehen verbessert daher die Reliabilität, und die Fehler werden nach der Normalisierung in allen Ebenen kleiner als 2,5° 16. Allerdings geht durch die Normalisierung die Information über das Ausmaß der Fehlstellung verloren. Bei dem Patienten mit Knickplattfuß aus Abbildung 2 wäre nach Normalisierung die erhebliche Eversion im Stand (Abb. 2, Bilder unten rechts) von ca. 20° nicht dargestellt, sondern gegen neutral 0 normalisiert. Daher ist die Normalisierung im klinischen Alltag nicht sinnvoll und wäre, wenn überhaupt, nur für konservative Interventionsstudien geeignet, um kleinere Effekte nachzuweisen. Die Frage, ob größere Füße von Erwachsenen eine bessere Reliabilität zeigen als kleinere Füße von Kindern, wurde noch nicht beantwortet; Studien zeigen aber, dass sich auch Kinder ab drei Jahren für eine Untersuchung mit dem OFM eignen 17 18 19.
Da Positionierungsfehler der Marker und des Patienten zu Fehlinterpretationen der Daten führen können, wird im nachfolgenden Abschnitt erläutert, was bei der Verwendung des OFM zur Beantwortung konkreter klinischer Fragestellungen zu beachten ist.
Folgende beispielhafte Fragestellungen sind bei einer Vielzahl von Fußdeformitäten relevant:
- Besteht ein Rückfußspitzfuß oder Hackenfuß beim Gehen, und ist der Mittelfuß beim Abrollvorgang stabil?
- Wie stark ist das Ausmaß der dynamischen In- oder Eversion im Rückfuß?
- Besteht oder dominiert eine Vorfußpronation oder ‑supination?
Hierdurch kann beurteilt werden, ob der Fuß seiner Funktion während der Lastaufnahme und im Abdruck nachkommt, was maßgeblichen Einfluss auf die Planung der weiteren Behandlung hat. Folgende Beispiele verdeutlichen, was bei der Anwendung zur Beantwortung dieser drei Fragen zu beachten ist:
Fehlermöglichkeiten bei der Bestimmung der Rückfuß- und Mittelfußdorsalflexion
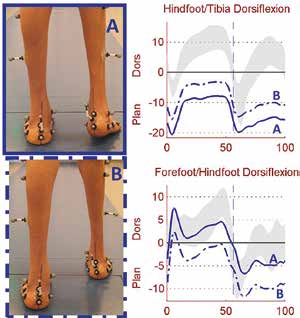
Vor jeder Messung im Gehen muss eine Standmessung im aufrechten Stand durchgeführt werden, um in der Software die Position der Koordinatensysteme zur Berechnung der Gelenkwinkel festzulegen. Ein jugendlicher Patient mit Klumpfuß bei Arthrogrypose kann wegen seines Spitzfußes im aufrechten Stand seine Ferse nicht auf den Boden aufsetzen (Abb. 3A). Dadurch wird in der Standaufnahme die Spitzfußstellung überschätzt; setzt man den Fuß nach vorne, bis die Ferse flach auf dem Boden aufliegt, hat man den korrekten Wert. In der Software kann auch bei hochstehender Ferse im Nachhinein eine Korrektur durchgeführt werden. Bei dem Patienten aus Abbildung 3 wurde klinisch ein Spitzfuß von –10° gemessen; dies deckt sich auch gut mit dem Maximalwert der gestrichelten Kurve in der Schwungphase und dem Wert bei initialem Bodenkontakt. In der Mitte der Standphase gibt das Sprunggelenk durch Einwirkung des Körpergewichtes noch um ca. 5° nach. Diese hohe Kraft des Körpergewichtes kann man bei der manuellen Messung in der Regel nicht erzeugen. Man sollte daher zur Überprüfung der Plausibilität nicht den maximalen Wert der Dorsalflexion in der Standphase mit dem klinischen Wert vergleichen. Bei diesem Patienten ist im Gegensatz zu dem Patienten mit Knickplattfuß aus Abbildung 2 keine Mittelfuß-Dorsalflexion gegenüber der Norm gegen Ende der Standphase vorhanden; somit stellt der Fuß einen guten Hebel für den Abdruck dar. Zusammengefasst kann die Standposition das Ausmaß des Rückfußspitzfußes und die Durchbiegung im Mittelfuß beeinflussen. Es sollte darauf geachtet werden, dass die Ferse bei der Standmessung auf dem Boden aufliegt bzw. die Korrektur in der Software bei hochstehender Ferse eingestellt wird.
Fehlermöglichkeiten bei der Bestimmung von In- und Eversion
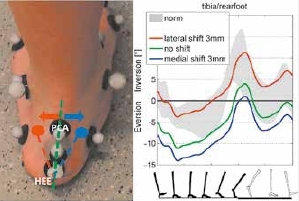
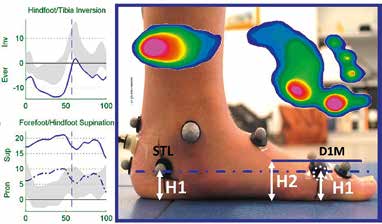
Die Stellung des Rückfußes ist von der manuellen Palpation der Längsachse des Calcaneus (grüne Linie in Abb. 4) abhängig. Diese verläuft durch die Mittelpunkte der Marker mit der Bezeichnung HEE und PCA. Während HEE in der Mitte des Calcaneus von posterior palpiert wird, bestimmt die mediolaterale Verschiebung des Markers HEE in Bezug auf den Marker PCA die Abweichungen des Rückfußes in Varus und Valgus. Die Linie folgt nicht dem Verlauf der Achillessehne, sondern stellt die Orientierung des Calcaneus in der Frontalebene dar. Eine Verschiebung des PCA-Markers von 3 mm (der Durchmesser der dargestellten Marker in Abb. 4 beträgt 9 mm) verursacht bis zu 5° Unterschied in der berechneten Eversion im Rückfuß und kann wie hier rot dargestellt zu einem fehlerhaften Befund führen. Die Autoren empfehlen daher, den Calcaneus zunächst einmal unbelastet von dorsal zu ertasten und dann zu beobachten, wie er sich unter Belastung in Varus und Valgus einstellt, um daraufhin die Linie von HEE nach PCA im belasteten Stand einzuzeichnen.
Fehlermöglichkeiten bei der Bestimmung von Vorfußpronation und ‑supination
Bei dem jugendlichen Patienten in Abbildung 5 mit Knicksenkfuß besteht eine leicht erhöhte Eversion im Rückfuß von 10° in der Standphase. Der Vorfuß müsste zum Ausgleich der Eversion eine Verwringung (Supination) von ebenfalls 10° zeigen, damit der Fuß plantigrade aufliegt. Die Supination dominiert aber mit ca. 20° über die Rückfuß-Eversion und müsste daher zu einer Fußaußenrandbelastung führen. Die Druckverteilung desselben Patienten (Abb. 5) zeigt aber eine Innenrandbelastung, also besteht hier ein Widerspruch. Es liegt ein Fehler beim Palpieren des Markers D1M vor. Bei der Neutralstellung im aufrechten Stand sollten die Kugeln STL und D1M denselben vertikalen Abstand vom Boden aufweisen. In Abbildung 5 ist der Marker D1M ca. 5 mm zu hoch angebracht worden; in der Folge wird die Vorfuß zur Rückfuß-Supination (durchgezogene Linie) um ca. 10° überschätzt. Hier empfehlen die Autoren, die Plausibilität der Daten nochmals mit der plantaren Druckverteilung zu kontrollieren. Idealerweise können sie auf eine standardisierte Fotodokumentation zurückgreifen und im Falle eines Widerspruchs die Position der Marker in den Fotos des Fußes, die den aufrechten Stand zeigen, überprüfen.
Anwendungsbereiche von Fußmodellen
Das Fußmodell ist geeignet für die zielgerichtete Planung der Therapie von Fußdeformitäten mit Einlagen, Orthesen oder bei operativem Vorgehen als sinnvolle Ergänzung zur bisherigen Diagnostik (siehe Abb. 1). Die Messung sollte wegen der direkt auf die Haut aufgebrachten Marker möglichst barfuß erfolgen, sodass eine Messung des Effektes von Einlagen oder Orthesen im Schuh nur eingeschränkt möglich ist, indem man kleine Löcher in den Schuh schneidet und somit das Schuhwerk zerstört 20. Die Versorgung z. B. mit Funktioneller Elektrostimulation (FES) zur Behandlung der Fußheberschwäche bildet hierbei eine Ausnahme. FES benötigt keine mechanische Korrekturwirkung am Fuß, da sie direkt auf den Peronealnerv wirkt und ein Fußmodell in der Lage ist, Fußhebung und Korrekturwirkung der damit verbundenen Fußdeformität nachzuweisen und optimal einzustellen, wie im nachfolgenden Beispiel erläutert wird.
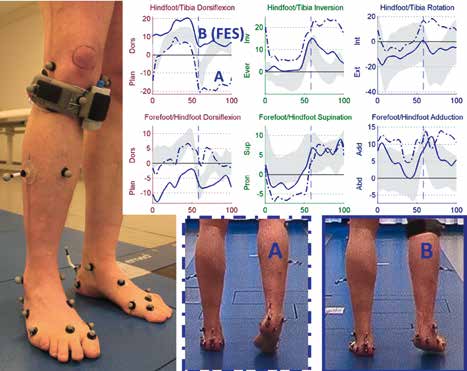
Anwendungsbeispiel zur Wirkung einer funktionellen Fußheberorthese auf die Fußbewegung
Eine Indikation zur Verwendung von FES ist eine Fußheberschwäche nach Schlaganfall, verursacht durch eine Schädigung von Nervenzellen des zentralen Nervensystems. FES aktiviert direkt den Nervus peroneus communis, um die Fußhebung wiederherzustellen. Dieser Nerv teilt sich im Bereich des Kniegelenks in den Nervus peroneus superficialis und den Nervus peroneus profundus. Der Nervus peroneus superficialis versorgt den Musculus peroneus longus und den Musculus peroneus brevis, die der Pronationsbewegung des Fußes dienen. Der Nervus peroneus profundus versorgt die zur Fußhebung benötigten Muskeln des Sprunggelenks wie z. B. den Musculus tibialis anterior und den Musculus extensor hallucis longus. Durch unterschiedliche mediolaterale Verschiebung der Elektroden in der Kniegegend (Abb. 6) oder mittels gezielter Implantation 21 lassen sich die beiden Nervenanteile Superficialis und Profundus in unterschiedlicher Intensität ansteuern, um den Fuß in der Schwungphase anzuheben und eine zusätzlich bestehende Fußdeformität, z. B. einen Klumpfuß wie in Abbildung 6 bei einem erwachsenen Patienten nach Schlaganfall, zu korrigieren. Wie in Abbildung 6 und in den Kurven des OFM dargestellt, wurde zwischen Rückfuß und Tibia die Dorsalflexion (Fußhebung) in der Schwungphase deutlich verbessert. Zudem wurde der initiale Fußaufsatz günstig beeinflusst und führte auch zu einer Änderung der Fußbewegung in der Standphase, in der eigentlich keine Stromaktivierung erfolgte. Durch verstärkte Aktivierung des Nervus peroneus superficialis wurde die Eversionsbewegung des Rückfußes stimuliert und die bestehende Rückfußinversion und Vorfußadduktion des Klumpfußes erheblich verringert. Somit hat die FES eine korrigierende Wirkung auf den Fuß, da sie durch die verbesserte Fußhebung das Durchschwingen erleichtert und beim Bodenaufsatz die Inversion und somit das Risiko eines Umknickens reduziert.
Schlussfolgerung
Fußmodelle erweitern die Diagnostik und zeigen die dynamische Fußfunktion auf. Bei der Anwendung ist die Palpierung der Marker unter Belastung im aufrechten Stand von entscheidender Bedeutung. Die vorgestellten drei Beispiele von Anwendungsfehlern beim Oxford-Fußmodell zeigen die Hintergründe und Auswirkungen der Positionierung auf die Bestimmung der Fußwinkel auf und können für Anwender hilfreich sein. Die Ausführungen beziehen sich auf das Oxford-Fußmodell. Da die anatomischen Landmarks am Fuß in den Modellen oft ähnlich sind 22, können bei anderen Modellen vergleichbare Effekte erwartet werden.
Für die Autoren:
Dr. Harald Böhm
Director Gait Laboratory
Orthopaedic Hospital for Children
Behandlungszentrum Aschau GmbH
Bernauerstraße 18
83229 Aschau i. Chiemgau
h.boehm@bz-aschau.de
Begutachteter Beitrag/reviewed paper
Böhm H, Hösl M, Döderlein L. Fußmodelle zur Analyse der Fußfunktion: Was ist bei der Anwendung zu beachten? Orthopädie Technik, 2015; 66 (12): 20–24
- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Michaud TC. Structural and functional anatomy of the foot and ankle. Foot orthoses and other forms of conservative foot care. Newton (MA): Thomas C. Michaud, 1997: 1–25
- Deschamps K, Staes F, Roosen P, Nobels F, Desloovere K, Bruyninckx H, Matricali GA. Body of evidence supporting the clinical use of 3D multisegment foot models: a systematic review. Gait Posture, 2011; 33 (3): 338–349
- Sander K, Rosenbaum D, Böhm H, Layher F, Lindner T, Wegener R, Wolf SI, Seehaus F. Instrumented gait and movement analysis of musculoskeletal diseases. Orthopäde, 2012; 41 (10): 802–819
- Deschamps K, Staes F, Roosen P, Nobels F, Desloovere K, Bruyninckx H, Matricali GA. Body of evidence supporting the clinical use of 3D multisegment foot models: a systematic review. Gait Posture, 2011; 33 (3): 338–349
- Stebbins J, Harrington M, Thompson N, Zavatsky A, Theologis T. Repeatability of a model for measuring multi-segment foot kinematics in children. Gait Posture, 2006; 23 (4): 401–410
- Hösl M, Böhm H, Multerer C, Döderlein L. Does excessive flatfoot deformity affect function? A comparison between symptomatic and asymptomatic flatfeet using the Oxford Foot Model. Gait Posture, 2014; 39 (1): 23–28
- Pohlig K, Baise M. Die TR-Ringorthese. Orthopädie Technik, 1994; 45 (9): 838–850
- Dixon P, Böhm H, Döderlein L. Ankle and midfoot kinetics during normal gait: A multi-segment approach. Journal of Biomechanics, 2012; 45 (6): 1011–1016
- Sander K, Rosenbaum D, Böhm H, Layher F, Lindner T, Wegener R, Wolf SI, Seehaus F. Instrumented gait and movement analysis of musculoskeletal diseases. Orthopäde, 2012; 41 (10): 802–819
- Stebbins J, Harrington M, Thompson N, Zavatsky A, Theologis T. Repeatability of a model for measuring multisegment foot kinematics in children. Gait Posture, 2006; 23 (4): 401–410
- Curtis DJ, Bencke J, Stebbins JA, Stansfield B. Intrarater repeatability of the oxford foot model in healthy children in different stages of the foot roll over process during gait. Gait Posture, 2009; 30 (1): 118–121
- Stebbins J, Harrington M, Thompson N, Zavatsky A, Theologis T. Repeatability of a model for measuring multisegment foot kinematics in children. Gait Posture, 2006; 23 (4): 401–410
- Curtis DJ, Bencke J, Stebbins JA, Stansfield B. Intrarater repeatability of the oxford foot model in healthy children in different stages of the foot roll over process during gait. Gait Posture, 2009; 30 (1): 118–121
- Curtis DJ, Bencke J, Stebbins JA, Stansfield B. Intrarater repeatability of the oxford foot model in healthy children in different stages of the foot roll over process during gait. Gait Posture, 2009; 30 (1): 118–121
- Stebbins J, Harrington M, Thompson N, Zavatsky A, Theologis T. Repeatability of a model for measuring multi-segment foot kinematics in children. Gait Posture, 2006; 23 (4): 401–410
- Wright CJ, Arnold BL, Coffey TG, Pidcoe PE. Repeatability of the modified Oxford foot model during gait in healthy adults. Gait Posture, 2011; 33 (1): 108–112
- Stebbins J, Harrington M, Thompson N, Zavatsky A, Theologis T. Repeatability of a model for measuring multi-segment foot kinematics in children. Gait Posture, 2006; 23 (4): 401–410
- Mindler GT, Kranzl A, Lipkowski CA, Ganger R, Radler C. Results of gait analysis including the Oxford foot model in children with clubfoot treated with the Ponseti method. J Bone Joint Surg Am, 2014; 96 (19): 1593–1599
- Theologis TN, Harrington ME, Thompson N, Benson MK. Dynamic foot movement in children treated for congenital talipes equinovarus. J Bone Joint Surg Br, 2003; 85 (4): 572–577
- Wegener C, Greene A, Burns J, Hunt AE, Vanwanseele B, Smith RM. In-shoe multi-segment foot kinematics of children during the propulsive phase of walking and running. Hum Mov Sci, 2015; 39 (2): 200–211
- Burridge JH, Haugland M, Larsen B, Pickering RM, Svaneborg N, Iversen HK, Christensen PB, Haase J, Brennum J, Sinkjaer T. Phase II trial to evaluate the ActiGait implanted drop-foot stimulator in established hemiplegia. J Rehabil Med, 2007; 39 (3): 212–218
- Deschamps K, Staes F, Roosen P, Nobels F, Desloovere K, Bruyninckx H, Matricali GA. Body of evidence supporting the clinical use of 3D multisegment foot models: a systematic review. Gait Posture, 2011; 33 (3): 338–349
